
基于粒子滤波状态估计的滚动轴承故障识别方法
2017-12-15 02:30,
计算机测量与控制 2017年11期
,
(西北工业大学 动力与能源学院,西安 710129)
基于粒子滤波状态估计的滚动轴承故障识别方法
史晓雪,吴亚锋
(西北工业大学动力与能源学院,西安710129)
提出了一种基于粒子滤波状态估计的滚动轴承故障识别方法,该方法主要包括故障模型建立和故障识别两个步骤;在故障模型建立部分,首先依据滚动轴承不同故障状态下的振动信号,建立对应的自回归模型,作为故障模型;在故障识别部分,将正常状态下对应的模型,转化为状态空间模型,设计粒子滤波器,然后对不同的故障状态进行估计,提取其残差的相关特征,并结合模型参数特征应用BP神经网络识别算法进行故障识别;最后以美国凯斯西储大学的滚动轴承振动数据为例,验证了该方法的有效性。
滚动轴承;粒子滤波;自回归模型;状态估计
0 引言
滚动轴承广泛应用于各种旋转机械设备中,而旋转机械设备的故障大多数也是由滚动轴承引起的。对滚动轴承进行故障识别,可提高机械设备的可靠性与维修性。如何从滚动轴承故障振动信号中提取有效的故障特征,实现早期故障的特征提取,一直是滚动轴承故障识别所面临的难题。
机械设备故障诊断方法,一般可分为基于解析模型的方法和基于数据驱动的方法两大类[1]。基于解析模型的故障诊断方法包括状态估计法,参数估计法和等价空间法,其基本思想是利用系统的数学模型和可观测的输入输出量构造残差信号来反映系统期望行为与实际运行模式之间的不一致,然后给予对残差信号的分析进行故障诊断。基于数据驱动的故障诊断方法可分为机器学习类方法、多元统计分析类方法、信号处理类方法等,其基本思想是对过程运行数据进行分析处理,从而在不需知道解析模型的情况下完成系统的故障诊断。基于解析模型的故障诊断方法研究较早,对于线性系统的诊断也较为完善、成果较多。然而,非线型系统的故障诊断依然是当前研究的难点和热点问题[3]。
本文将基于数据驱动的识别方法与基于解析模型的方法相结合,提出了一种基于粒子滤波的滚动轴承故障识别方法。该方法包含两个步骤,即故障模型建立和故障识别。故障模型建立是依据原始振动信号建立故障模型,为后续状态估计奠定基础。在故障识别部分,设计正常状态所对应的粒子滤波器,对不同故障状态进行估计,提取其残差的相关特征,并结合模型参数特征应用BP神经网络识别算法进行故障识别。
1 粒子滤波算法介绍
粒子滤波算法(particle filtering,PF)源于蒙特卡洛(Monte carlo)的思想,通过非参数化的蒙特卡洛模拟方法来实现递推贝叶斯滤波。适用于任何能用状态空间模型描述的非线性系统,精度可以逼近最优估计。
任一动态系统的状态空间模型可以表示为:
xk=f(xk-1,vk)
(1)
yk=h(xk,nk)
(2)
上面两式中,式(1)所描述的是状态转移方程,式(2)所描述的是观测方程。xk为系统状态在k时刻对应的状态变量,yk为观测值,表示的是xk对应的观测值,vk为系统噪声,nk为观测噪声,vk和nk相互独立。

(3)
(4)
假设重要密度可以分解为:
q(x0:k|z1:k)=q(xk|x0:k-1,z1:k)q(x0:k-1|z1:k-1)
(5)
由于后验概率密度函数可表示为:

∝p(zk|xk)p(xk|xk-1)p(x0:k-1|z1:k-1)
(6)
将式(6)和式(5)带入(4),可得重要性权值更新公式为:
(7)
(8)
标准粒子滤波算法选择易于实现的先验概率密度作为重要密度函数,即:
(9)
将式(9)带入式(8),重要性权值可简化为:
(10)

(11)
而后验概率密度p(xk|z1:k)可表示为:
(12)
2 粒子滤波状态估计滚动轴承故障识别
本文提出的基于粒子滤波状态估计的故障识别方法流程图如图1所示,包括故障模型建立和故障识别两个步骤。其基本思想是:滚动轴承在正常状态下,通过粒子滤波算法得到的状态估计值与真实值的差值应该比较小;当处于故障状态下时,状态估计值与真实值之间的差值较大。不同故障所获得的差值不同,作为故障识别的依据。
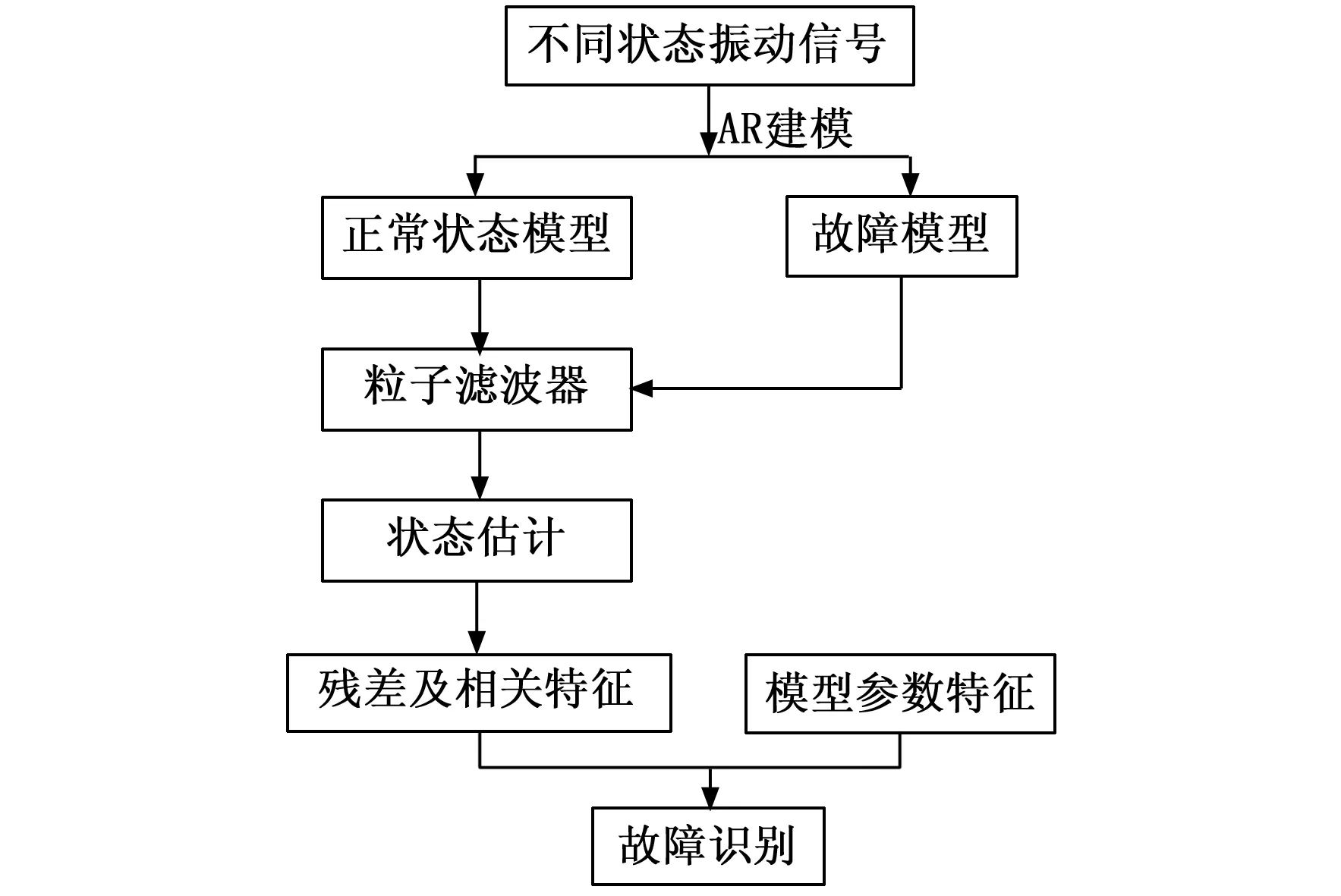
图1 粒子滤波状态估计故障识别方法流程图
2.1 故障模型建立
在故障模型建立过程中,采用自回归(AR)模型建立故障模型。其数学表达式为:
x(n)=a1x(n-1)+a2x(n-2)+…+apx(n-p)+e(n)
(13)
其中:a为模型参数;p为模型阶数;e(n)为模型残差且服从标准正态分布。
AR建模主要包括阶数确定和参数求解两个部分,其中,定阶的主要方法有AIC,FPE,BIC等定阶准则;参数求解方法主要有最小二乘法,最大似然估计、矩估计、Levinson-Durbin算法等。本文选取AIC准则确定模型阶数,LD算法计算模型参数。
(1)AIC准则模型定阶。
AIC准则的一般表示形式为:
(14)

(2)模型参数求解。

(15)
记e(n)为预测值和真值之间的残差,则:

(16)
因此总的预测误差功率为:

(17)
采用Levinson-Durbin递推算法计算模型参数:

(18)
am(k)=am-1(k)+kmam-1(m-k)
(19)
(20)
其中:rx(m)为x(n)的自相关函数,ρm为m阶时的前向预测的最小误差功率。
当m=1时,有:
a1(1)=-rx(1)/rx(0)
(21)

(22)
定义初始条件为:
ρ0=rx(0)
(23)
则有:
(24)
上述条件为基于L-D算法求AR模型参数提供了初始值。L-D算法从低阶开始递推,直到阶次p,给出了在每一个阶次时的所有参数,即am(1),am(2),…,am(m),其中m=1,2,…,p。
2.2 故障识别
采用正常状态所对应的模型作为粒子滤波状态空间方程,假设观测值yk和xk存在线性关系,则根据状态空间模型表达式(1)和(2),可构造粒子滤波器如下:

(25)
yk=xk+vk
(26)
(1)状态预测


(4)更新粒子权值并归一化。
(5)粒子重采样。
在正常状态下,残差rk比较小,接近于0,在某种故障状态下,残差rk较大。根据不同故障状态下残差值的大小,计算其故障特征,其特征指标如表1所示:

表1 残差相关特征
其中,M为状态估计步长。
3 仿真实验
3.1 实验介绍
为了验证本文提出方法的有效性,采用美国凯斯西储大学电气工程实验室的滚动轴承实验平台采集到的故障数据对该方法进行验证。滚动轴承故障模拟试验台如图所示。该装置有一台2英制马力(hp)的电动机在图左部,一个扭矩编码器/传感器在图中部,一个功率测试计在图右部,以及电子控制器组成。实验轴承的转速分别为1 797 rpm,1 772 rpm,1 750 rpm,1 730 rpm,振动信号采样频率为12 kHz。轴承采用电火花加工的方式引入单点缺陷来模拟轴承故障,故障类型包括内圈故障,外圈故障和滚动体故障这三种,损伤的尺寸分别为0.007、0.014、0.021、0.028英寸。
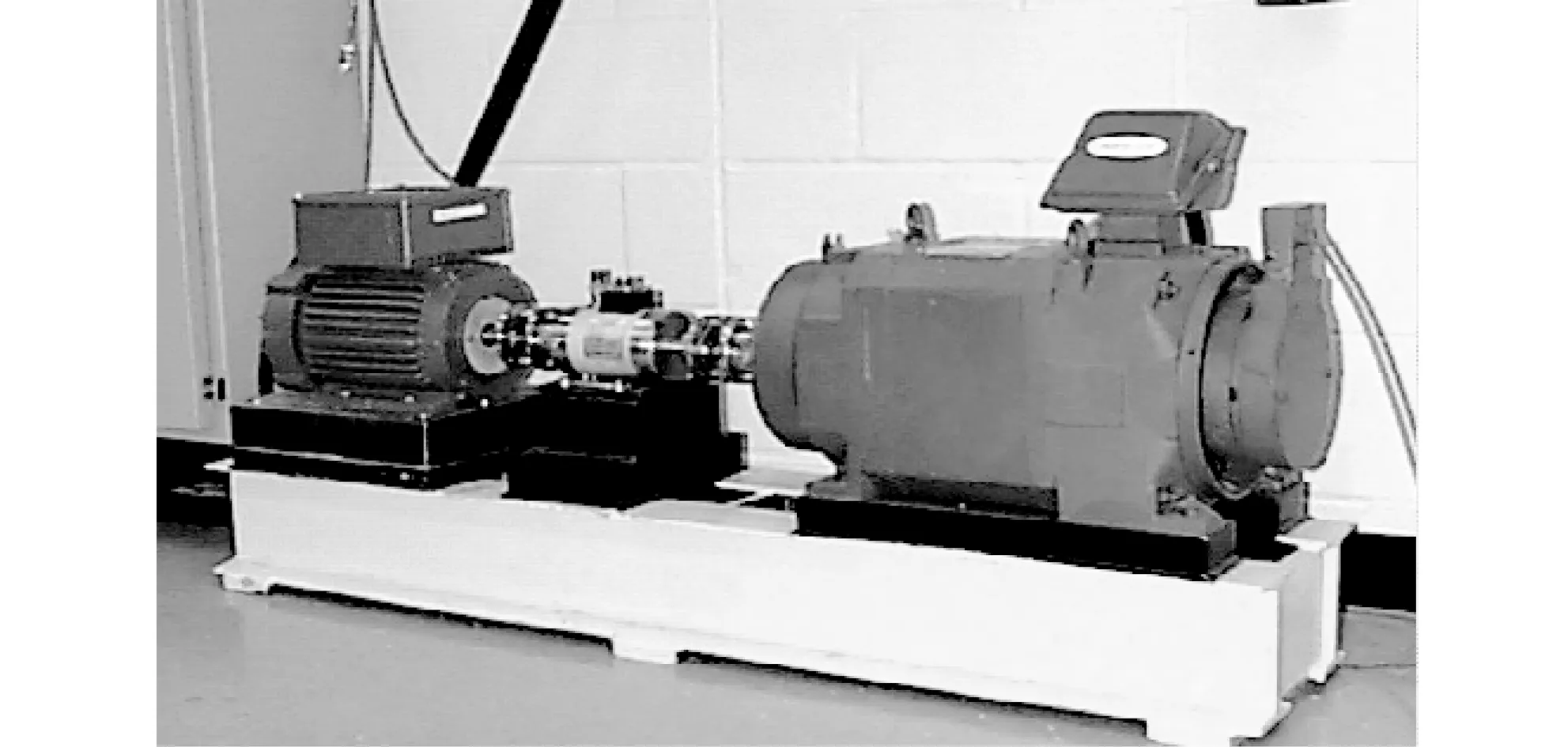
图2 凯斯西储大学电气工程实验室的滚动轴承实验平台
3.2 对比分析
采用1797 rpm下,损伤尺寸为0.007英寸对应下的三种轴承故障数据进行故障识别。对于每种故障状态,选取1~256个点进行AR建模,依据AIC准则确定模型阶数为6阶,计算得到模型参数如表2所示,将该参数带入式(13)可得到四种故障模型。
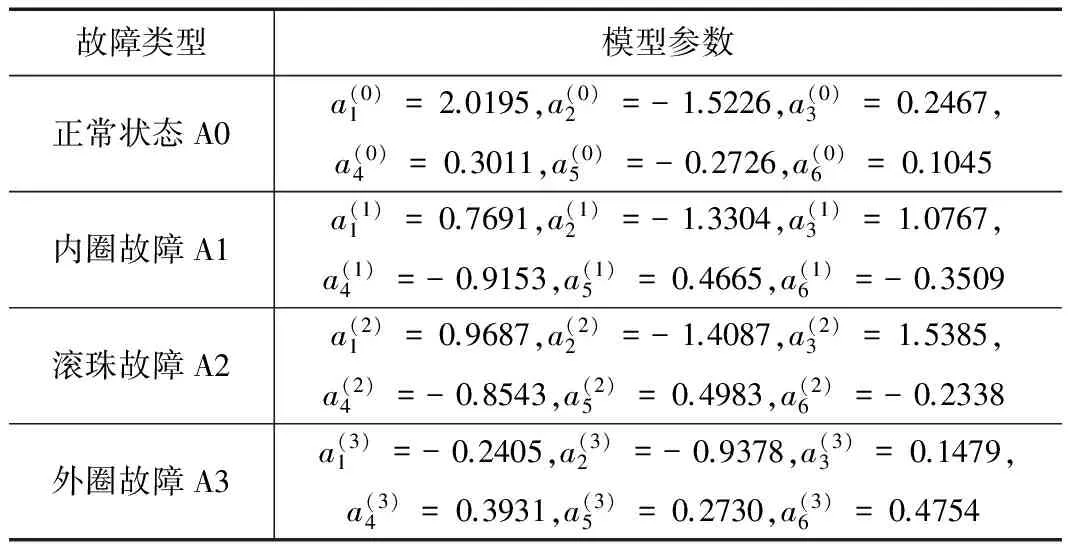
表2 不同状态下模型参数
将正常状态下对应的AR模型作为状态空间模型,设计粒子滤波器,对不同故障状态进行估计。其中,粒子数N=100,估计步长T=256。现截取50步长的残差结果,如图3所示。

图3 不同故障状态残差图
由表1所示公式,计算该残差特征的绝对均值、标准差、方差及峰值,得到4种特征指标。每种故障选取1组特征指标,如表3所示。

表3 残差相关特征
将残差相关特征结合参数特征作为BP神经网络的输入进行故障识别。采用3层的BP神经网络,网络结构为N(10,6,3)。取显示间隔为50,学习步长0.3,最小均方误差为0.1,最大训练次数为1000。
为了验证该时域特征参数在故障识别中的优势,现选取原始时域特征与该特征做比较。原始时域特征信息如表4所示。

表4 原始时域特征指标
对表4所示原始时域特征采用相同的识别方法进行故障识别,并将本文方法与其进行对比,结果如表5所示。

表5 不同特征的故障识别率
从表5可以看出,三种故障的识别率由高到低依次为:外圈故障、内圈故障和滚珠故障。结合图3可知,残差越大故障的识别率越高。对于内圈故障,两种方法所得的故障识别率基本一致,对于滚珠故障和外圈故障,本文方法所得的故障识别率较高。可见,参数及残差的相关特征相对于原始时域特征具有敏感性高的特点。因此,在滚动轴承故障识别中,采用本文方法可以提高故障识别的准确性。
4 结论
本文提出了一种基于粒子滤波状态估计的滚动轴承故障识别方法。对滚动轴承的不同故障状态建立故障模型,通过粒子滤波对每种故障状态进行估计,进而获得不同故障状态下的残差的相关特征,将其与模型参数特征及BP神经网络相结合,应用于滚动轴的故障识别。为了验证本文所提方法的有效性,采用美国西储大学滚动轴承故障数据进行分析,结果表明该方法具有识别率高的优点,可以在滚动轴承故障识别中较好地应用。
[1] 张三同,郝晶晶. 多模型粒子滤波的故障诊断方法研究[J]. 控制工程, 2012, 19(5): 864-869.
[2] 夏 飞, 郝硕涛, 张 涛, 等. 改进粒子滤波在汽轮机故障诊断中的应用[J]. 计算机测量与控制, 2016, 24(1): 35-38.
[3] 张玲霞, 刘志仓, 王 辉,等. 非线性系统故障诊断的粒子滤波方法[J]. 电子学报, 2015, 43(3): 615-619.
[4] Alrowaie F, Kwok KE, Gopaluni RB. An algorithm for fault detection in stochastic non-linear state-space models using particle filters[J]. Control Engineering Practice, 2012, 20(10):1016-1032.
[5] Zhang LX, Liu ZC, Wang H.Particle Filter Method for Fault Diagnosis in Nonlinear System[J]. Acta Electronica Sinica , 2015, 43(4): 615-619.
[6] 杜京义,殷梦鑫. 一种改进粒子滤波算法应用于故障诊断[J]. 系统仿真学报, 2014, 26(1): 62-66.
[7] 李宏坤, 杨 蕊, 任远杰,等. 利用粒子滤波与谱峭度的滚动轴承故障诊断[J]. 机械工程学报, 2017, 53(3): 63-72.
[8] 姜洪开, 王 涵,郭 栋. 基于改进粒子滤波的滚动轴承故障识别[J]. 振动与冲击, 2014, 33(8): 132-134.
FaultDiagnosisofRollingBearingBasedonParticleFilterStateEstimation
Shi Xiaoxue,Wu Yafeng
(College of Power and Energy, Northwestern Polytechnical University, Xi’an 710129, China)
A fault diagnosis method of rolling bearing based on particle filter state estimation is proposed. The method mainly includes two steps: fault model establishment and fault identification. In the fault model establishment part, the corresponding autoregressive model is established according to the vibration signals of the rolling bearings in different fault states, which is used as the fault model; In the fault recognition part, the corresponding model in the normal state is transformed into the state space model, and the particle filter is designed. Then, the related features of the residuals are extracted by estimating the different fault states. Combined with the model parameters, the BP neural network identification algorithm is used to identify the faults. Finally, the validity of the method is verified by the vibration data of rolling bearing of Case Western Reserve University.
rolling bearings; autoregressive model; particle filter; state estimation
2017-08-15;
2017-09-14。
史晓雪(1992-),女,甘肃白银人,硕士研究生,主要从事信号与信息处理方向的研究。
吴亚锋(1961-),男,陕西西安人,教授,博士生导师,主要从事现代信号处理理论与方法、计算机测控技术、振动噪声分析与控制方向的研究。
1671-4598(2017)11-0030-04
10.16526/j.cnki.11-4762/tp.2017.11.008
TP391
A
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
电子制作(2018年16期)2018-09-26
电子制作(2018年10期)2018-08-04
火控雷达技术(2016年3期)2016-02-06
中国惯性技术学报(2015年1期)2015-12-19
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
