
模块化桁架索网天线找形与展开动力学研究
2017-12-14 06:45:12常汉江王碧罗凯田强胡海岩
深空探测学报 2017年4期
常汉江,王碧,罗凯,田强,胡海岩
(1.北京理工大学 宇航学院,北京 100081;2.上海宇航系统工程研究所,上海 201108)
模块化桁架索网天线找形与展开动力学研究
常汉江1,王碧2,罗凯1,田强1,胡海岩1
(1.北京理工大学 宇航学院,北京 100081;2.上海宇航系统工程研究所,上海 201108)
为了对单模块桁架索网天线展开动力学进行建模,首先,基于力密度法提出一种考虑桁架弹性变形的索网找形方法:渐近迭代力密度法;其次,基于绝对节点坐标法建立桁架刚柔耦合模型,采用等几何分析方法建立索网非线性有限元模型,进而根据第一类拉格朗日方程建立天线刚柔耦合系统动力学方程,并采用广义-α方法对动力学方程进行高效数值积分;最后,对桁架索网天线展开过程的动力学特性进行了研究和分析。研究结果表明:索网找形方案满足天线反射面形面精度要求,得到均匀的索段张力分布;展开过程中桁架竖杆应力最大,在展开末段,驱动滑块对桁架产生较大冲击。
桁架索网天线;找形方法;展开动力学;等几何分析
0 引 言
近年来,我国航天科技发展迫切需要掌握柔性空间结构在轨展开技术,以满足卫星通信、天基对地观测、深空探测等重大需求[1-2]。柔性空间可展开机构是人类进行空间探测活动不可缺少的航天装备,其中研究最活跃、发展潜力最大的一个分支是模块化空间可展开天线。模块化空间可展开天线是近二三十年来随着航天科技的快速发展而产生的一种新型空间结构,自产生以来便受到许多发达国家和科研机构的高度重视[3-4]。这类天线主要是由柔性支撑桁架、索网结构、金属反射面和刚性关节组成的刚柔耦合多体系统。在模块化空间可展开天线的反射面设计中,面临众多问题与挑战,其中包括如何提高天线反射面的形面精度,以及精确预测展开过程会呈现系统大范围运动与柔软部件大变形之间的非线性耦合动力学现象,保证此类大型空间可展开结构的成功展开[5]。
为了提高天线反射面的形面精度,国内外学者对天线索网反射面的找形分析进行了大量研究。其中Pellegrino等[6]对张拉结构的找形方法进行了详细综述。Linkwitz[7]提出的力密度法因具有有效性和方便性,是迄今应用最为广泛的索网天线反射面找形方法。力密度法的基本思想是通过预先给定各索段张力和杆长的比值,即力密度系数,将几何非线性问题转换为线性问题,联立求解线性方程组,得到索网中各节点的坐标。由于力密度法没有考虑节点坐标变化对节点平衡的影响,得到的初始位形误差较大,难以满足天线反射面的形面精度要求。Morterolle等[8]提出了迭代的力密度法,该方法的主要思路是在每个迭代步更新力密度系数,调整预张力,从而得到均匀的索段预张力分布,但该方法对网格构型有一定的限制。李团结等[9]提出了将遗传算法与有限元方法相结合的索段预张力优化设计与形面调整方法,但该方法只适用于旋转抛物反射面,对于大型偏置抛物反射面的预张力优化,该方法会面临设计变量过多、难于求解等问题。杨东武[10]提出一种变量优化的找形方法:极小范数法,该方法以环形桁架索网天线反射面为找形分析对象,将前索网面索段张力的平均值和后索网面索段张力的平均值作为设计变量,前后索网索段最大拉力比作为目标函数,求解静不定平衡方程的极小范数解,从而得到最小和最大张力比以及所有索段预张力分布,但是由于使用最小范数法,容易出现索段负拉力,并且对索网初始构型要求高。Li等[11]将迭代力密度法和极小范数法相结合,对考虑桁架弹性变形的环形桁架索网天线进行预张力优化找形分析,得到了均匀的索网预张力分布,但此方法主要适用于环形网架式空间可展开天线。
此外,空间可展开结构在展开过程中涉及复杂的动力学问题,对可展开结构的设计和研制带来了较大挑战。由于这类结构的展开动力学地面实验难度大、无法完全抵消重力影响,故其展开过程的动力学数值模拟是确保结构在轨展开成功的一项关键技术。例如,Neto等[12]建立了基于复合材料板和梁单元的欧洲ERS-1卫星的柔性太阳能电池阵列、柔性桁架、刚性本体系统的多柔体模型,并采用模态综合法降低求解规模,分析了柔性空间结构与卫星本体之间的耦合动力学特性。Jin等[13]建立了含柔性索网的卫星六边形桁架天线多柔体动力学模型,进行了展开动力学研究,对网面绳索张力的计算结果与实测结果较为接近。Meguro[14]等对ETS-VIII卫星上的模块化空间可展开天线的结构设计、地面测试及在轨展开实验进行了研究。田大可[4]对七模块空间可展开天线支撑桁架进行了设计,并对桁架进行了展开精度实验和动力学实验,但并未考虑金属反射网对展开精度以及结构刚度的影响。Li等[15]采用绝对节点坐标法建立环形网架式天线系统动力学模型,分析索网预张力对环形桁架天线展开动力学的影响,并采用区域分解方法和静力凝聚法降低系统自由度,为大型环形网架式天线展开动力学研究提供了高效求解算法。
由于大型可展开空间结构通常存在很多非线性约束、运动副间隙及复杂的载荷条件,商业软件在系统动力学建模、数值求解等方面遇到许多困难。另外,模态截断方法不能处理带柔性索网的空间结构展开动力学问题。早期在索网动力学研究方面,一般采用基于小转动、小变形假设的柔性多体动力学模型,将绳索的弹性体形变与整体位移分开考虑,在小变形假设下解耦弹性体的变形与刚性运动[16]。Shabana等[17]基于连续介质力学和有限元方法提出的绝对节点坐标法(Absolute Nodal Coordinate Formulation,ANCF)是柔性多体系统动力学发展的一个里程碑。刘铖等[18]基于连续介质力学的第一类Piola-Kirchhoff应力张量,得到了便于高效计算绝对节点坐标有限单元弹性项的解析公式。此外,等几何分析(Isogeometric Analysis,IGA)是近年来由Hughes[19]教授提出的一种全新的有限元分析方法,这种方法采用非均匀有理B样条(Non-Uniform Rational B-Splines,NURBS)作为基函数,将计算机辅助设计与有限元分析统一于同一种几何描述框架之内,消除了长期以来存在于CAD与FEA之间的鸿沟,使得FEA也能够使用精确的几何造型,且非常稀疏的网格划分就能够高精度地描述求解域。以绝对节点坐标方法和等几何分析方法建立的多柔体系统动力学方程具有常数质量矩阵、不存在科氏力和离心力项等特点,比传统浮动坐标法、大转动矢量法等更能精确地反映含超柔性构件的可展开空间结构的动力学特性。
1 系统描述及展开动力学建模
模块化空间可展开天线采用模块化的设计思想,通过模块数量及模块尺寸的变化,可实现天线口径的灵活变化,从而得到大口径偏置抛物面天线,如图1所示,可展开支撑结构由14个展开原理及结构尺寸基本相同的模块组成。
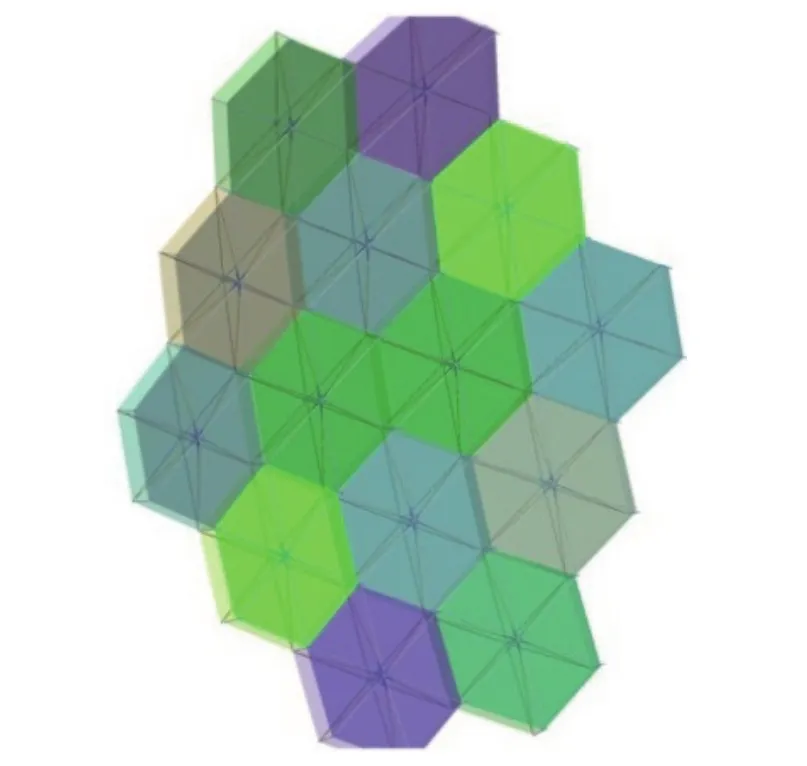
图1 支撑桁架的空间几何模型Fig.1 Geometry model of truss structure
天线索网结构是天线反射面工作的基础,在内部索段张拉力的作用下,张拉成一定的形面,其形面精度的高低决定天线的工作性能好坏。索网结构安装在支撑桁架上,具备为金属反射网提供安装接口,保证天线展开后形面精度和天线刚度的功能。由于模块化空间可展开天线的各模块尺寸基本相同,首先对单模块反射面天线进行研究,从而为多模块、大口径反射面天线的研究奠定基础。本文研究的单模块天线结构如图2所示,单模块反射面口径为5.3 m,它主要由支撑桁架、索网、金属反射网和张力索组成。金属反射网附着在前索网上,其形面精度直接决定天线的性能。由于金属反射面面密度很小,仅为15 g/m2,因此下文研究中将金属反射面以集中质量的形式等效到索网节点上。通过安装在中心杆上的弹簧驱动滑块运动,从而实现天线的展开和收拢,驱动装置的具体工作原理参考文献[4]。索网结构主体均采用凯夫拉绳,支撑桁架杆件采用碳纤维材料,刚性关节采用不锈钢材料,周边张紧索采用钢丝绳。桁架及索网的详细材料参数如表1所示。

图2 索网与支撑桁架接口Fig.2 The interface of the cable-net and truss

表1 桁架及索网材料参数Table 1 Material parameters of the truss and cable-net
1.1 基于绝对节点坐标方法的三维梁单元
本文采用Shabana与Yakoub[20]提出的三维全参数绝对节点坐标梁单元对碳纤维杆件进行建模,如图3所示。该梁单元长度为l,具有2个节点,每个节点有12个绝对坐标,共有如下24个绝对坐标


图3 基于绝对节点坐标方法的三维梁单元Fig.3 Three-dimensional beam element described by ANCF


1.2 基于NURBS的欧拉伯努利梁单元
绳索及钢丝绳主要考虑其拉伸及弯曲变形而忽略截面剪切变形。本文采用基于Euler-Bernoulli假设的NURBS梁单元对柔性索网和钢丝绳进行建模,单元变形前后横截面都垂直于中心轴。NURBS是非均匀有理B样条曲线(Non-Uniform Rational B-Splines)的缩写,是B样条的有理形式,其中B样条基函数的数学定义如下

对于p= 1,2,3,…,B样条基函数定义为

因此可以得到NURBS及NURBS曲线的定义
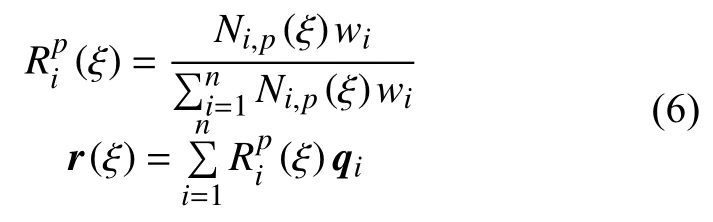
其中:qi是NURBS曲线的控制点,wi每个控制点相应的权重。图4为基于Euler-Bernoulli假设的NURBS梁单元。该梁单元的应变能可分为拉伸应变能与弯曲应变能两部分

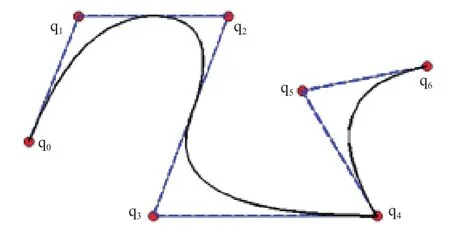
图4 基于NURBS的欧拉伯努利梁单元Fig.4 Euler-Bernoulli beam element based on NURBS


1.3 刚-柔耦合多体系统动力学方程
在天线模型中,除了柔性杆件和索网外,还存在大量刚性关节,每个刚体构件均被视为一个刚体单元,可采用自然坐标法[5](Natural Coordinate Method,NCF)建模,弹性碳纤维杆件采用ANCF建模,柔性索网采用等几何分析欧拉伯努利单元建模。按照有限元法中的单元组装过程,可得到系统的质量矩阵、广义外力向量、弹性力向量及其Jacobi矩阵;再考虑到系统中的约束条件,采用第一类拉格朗日方程可建立系统的动力学方程

其中:M为系统质量阵;q为系统广义坐标向量;F为系统的弹性力向量;Q为系统的广义外力向量;和分别为系统约束方程及其对广义坐标的Jacobi矩阵;为拉格朗日乘子向量。
求解上述多体系统动力学方程的方法通常可分为显式和隐式两类方法。对于柔性多体系统动力学问题,特别是柔性大变形多体系统动力学问题,鉴于显式算法的条件收敛特性势必会带来对积分步长的限制,因此求解此类系统动力学方程一般采用隐式积分算法。本文采用广义-α隐式算法[5]对刚-柔多体系统动力学方程进行求解。
2 索网找形方法:渐近迭代力密度法
根据模块化索网天线的几何模型,设计了如图5所示的索网天线找形方法:渐近迭代力密度法。通过建立天线整体非线性有限元模型,在找形过程中考虑了桁架弹性变形对找形结果的影响。该找形过程主要分为3个部分:设计模块,找形分析模块和静力平衡模块。
1)在设计模块中,采用最小二乘法对索网天线抛物面进行球面拟合[4],根据天线设计参数获得支撑桁架空间位置,然后根据天线反射面形面精度确定索网分段数,最后确定找形前索网节点坐标。
2)在找形分析模块中,首先计算索网各索段长度l以及指定索段的初始张力值T,从而求得各索段的初始力密度q=T/l。根据索网节点坐标和索段力密度建立索网整体平衡方程[5],求解平衡方程得到索网节点平衡位置,更新索网的索段长度和张力。然后进行收敛误差判读,根据天线抛物面公式对前索网节点坐标进行修正,计算修正后前索网节点位置误差tol,若误差不满足设计要求,则由修正后的索网结点更新索段长度,进而求得新的力密度系数,进一步进行力密度迭代,直至满足误差设计要求。
3)在静力平衡模块中,根据上一步索网找形结果,采用绝对节点坐标方法和等几何分析方法建立天线非线性有限元模型,对天线进行静力平衡分析,根据静力平衡分析结果更新桁架节点坐标。通过找形分析和静力平衡模块的迭代,最终获得考虑桁架弹性变形的索段张力分布和索网节点位置,完成天线找形分析任务。
在上述步骤3)的有限元模型中,需要建立桁架索网反射面非线性有限元模型,图6给出了桁架1/6单元杆件的编号,包含4根碳纤维杆件和N个刚体,中心杆上有两个滑块:上滑块和下滑块,两个滑块之间是驱动弹簧,驱动弹簧的刚度为560 N/m。碳纤维杆件采用1.1节中的全参数ANCF单元建模,刚体单元采用自然坐标法建模,周边钢丝绳和索网索段采用1.2节的IGA梁单元建模。单元类型和单元个数如表2所示。总自由度为18 084,约束方程个数为7 080。
采用上述找形方法对某单模块桁架索网天线进行找形分析,找形前天线索网分布如图7所示,经过找形分析后,得到图8所示的索网分布,索网反射面的形面精度为0.467 1 mm,满足实际工程需求。图9给出了索网找形分析后前索网的Mises应力分布,从图中可以看出前索网内部索段的应力分布是相对均匀的,而边界索段的应力明显大于内部索段,这是为了保证天线展开后有足够的反射面积。其中前索网内部索段拉力的最大值为11.05 N,最小值为9.97 N,内部索段最大拉力比为1.108,内部索段的拉力分布是比较均匀的。边界处索段拉力最大值为95.81,最小拉力值为90.39,边界索段最大拉力比1.06,边界索段拉力基本相等。
图5 模块化索网天线找形方法流程图Fig.5 Flowchart of the form-finding method for the modular cable-truss antenna
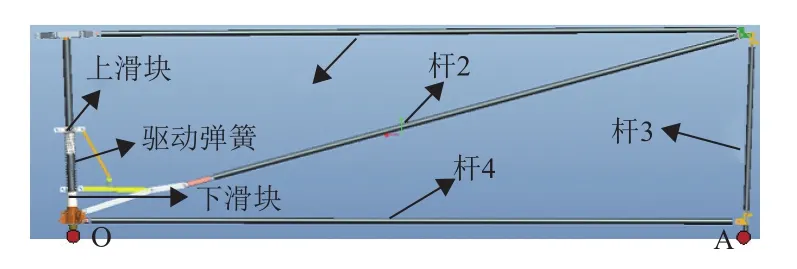
图6 桁架1/6单元杆件编号Fig.6 Illustration of the bars for one-six truss
3 索网天线展开动力学分析
本节建立桁架索网天线系统的刚柔耦合动力学模型,对天线单模块系统进行展开动力学分析。为了获得天线展开仿真的初始构型,首先按照找形结果在天线完全展开时在索网和钢丝绳上施加一定的预应力,即考虑完全展开时网面和钢丝绳处于张紧状态,然后通过滑块滑移至中心杆顶端使天线完全收拢,从而获得天线展开的初始坐标。最后通过对滑块的移动轨迹进行规划,对天线整个展开过程进行数值仿真。

表2 桁架和索网单元类型和单元数Table 2 Element type and quantity of the truss and cable-net

图7 找形前天线结构示意图Fig.7 Illustration of the antenna before form-finding
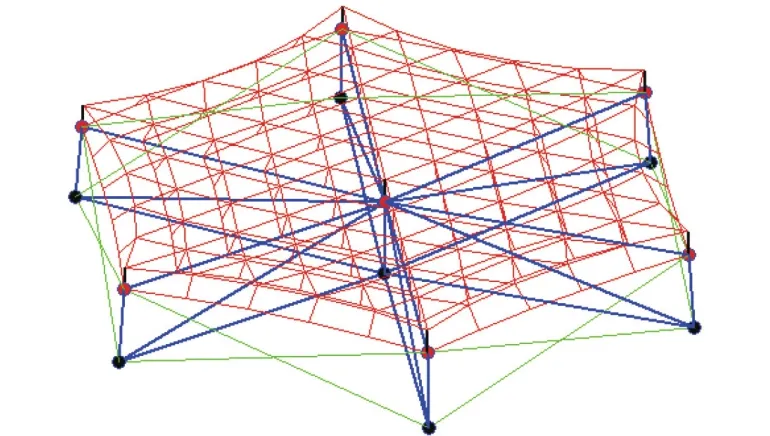
图8 找形后天线结构示意图Fig.8 Illustration of the antenna after form-finding
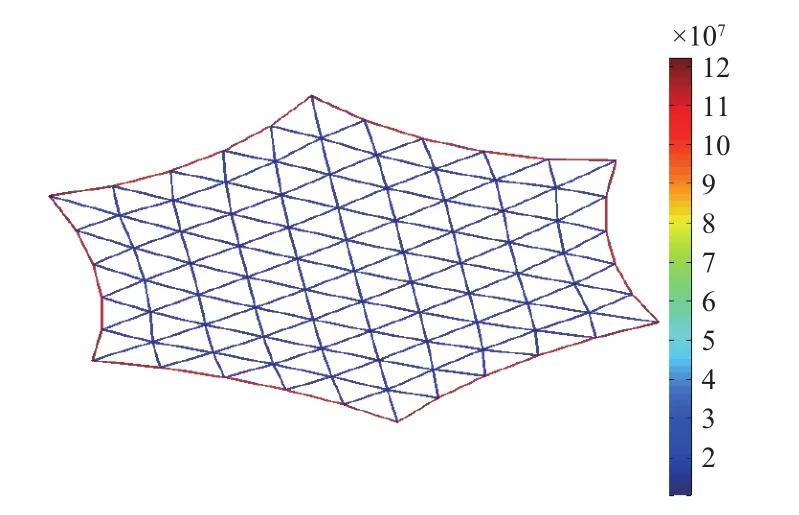
图9 前索网面Mises应力分布Fig.9 The contours of von Mises stress of the front mesh
滑块质心轴向位移随时间变化曲线如图10所示,0~1 s,滑块从静止均匀加速到速度v,1~7 s,滑块保持速度为v的匀速运动,7~8.5 s,滑块均匀减速直至速度为0。展开过程仿真总时间为8.5 s,仿真时间步长为1×10-4s。在索网天线展开过程中,索网发生了明显的大变形,为了验证仿真结果是否收敛,对索网采用不同网格划分分别进行仿真,索网I为每条索段划分单元数为8,索网总自由度为7 920,索网II为每条索段划分单元数为12,索网自由度为10 800。图11显示了两种不同网格划分下OA两点(如图6所示)之间索段长度变化,从图中可以看出索段长度变化几乎一致。
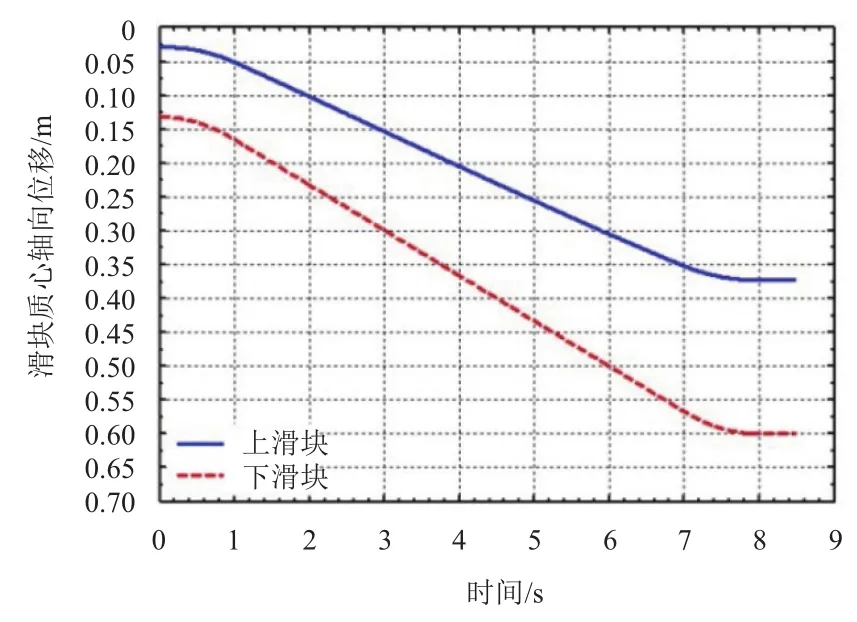
图10 滑块质心轴向位移随时间变化曲线Fig.10 The slider axial displacement curve

图11 反射面展开过程中在不同网格划分下OA两点之间索段长度变化Fig.11 The distance of the rope between point O and A via time in deployment process
图12给出了4个指定时刻的索网天线动力学展开构型,从图中可以看出在桁架索网展开过程中初始阶段展开速度较快,这是由于滑块轨迹规划导致的,为了使天线整个展开过程平稳,需要对滑块的运动轨迹进一步优化,或者增加缓释机构,减小展开最后阶段滑块对桁架的冲击。整个展开过程所用仿真时间为72 h。

图12 展开过程典型动力学构型Fig.12 Typical dynamic configurations during the deployment process
天线展开过程杆件的最大Mises应力随时间变化曲线如图13所示。由结果可知,杆1(上横杆)、杆2(斜杆)在初始展开过程中出现了一次应力峰值,随后应力变小,这是由于对滑块施加位移约束造成的,在展开初始阶段滑块有加速过程,加速时间为1 s,这个过程是不光滑的,会造成杆件应力突然增大,直至速度恒定,加速度为零时杆件应力减小。展开最后阶段网面绳索和周边钢丝绳的张力对杆3(即竖杆)的变形影响较大,杆3产生的应力较大,最大值为48 MPa,而对其他杆件的变形影响较小。

图13 展开过程杆件最大Mises应力Fig.13 The maximum Von Mises stress during the deployment process
4 结 论
本文以模块化桁架索网天线为研究对象,提出了一种新的桁架索网找形方法:渐近迭代力密度法,在找形过程中考虑了桁架弹性变形对找形结果的影响。找形方法简单有效,找形结果满足实际工程需求。以找形结果为基础,基于绝对节点坐标方法和等几何分析方法建立了桁架索网天线刚柔耦合动力学模型,对某单模块桁架索网天线系统进行了展开动力学数值仿真,结果表明:
1)网面绳索和周边钢丝绳的张力对展开过程中竖杆的变形影响较大,竖杆产生的应力较大。
2)支撑桁架初始阶段展开缓慢,然后展开速度迅速加大,导致完全展开时滑块与中心杆关节碰撞剧烈,使得杆件应力较大以及网面运动速度较快,在实际工程需要施加缓释机构,以保证机构平稳展开。
[1]胡海岩,田强,张伟,等.大型网架式可展开空间结构的非线性动力学与控制[J].力学进展,2013,43(4):390-414.Hu H Y,Tian Q,Zhang W,et al.Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes[J].Advances in Mechanics,2013,43(4):390-414.
[2]孟光,周徐斌,苗军.航天重大工程中的力学问题[J].力学进展,2016,46:267-322.Meng G,Zhou X B,Miao J.Mechanical problems in momentous pro jects of aerospace engineering[J].Advances in Mechanics,2016,46:267-322.
[3]Meguro A,Tsujihata A,Hamamoto N,et al.Technology status of the 13 m aperture deployment antenna reflectors for engineering test satellite VIII[J].Acta Astronautica,2000,47(2-9):147-152.
[4]田大可.模块化空间可展开天线支撑桁架设计与实验研究[D].哈尔滨:哈尔滨工业大学,2011.Tian Da-ke.Design and experimental research on truss structure for modular space deployable antenna[D].Harbin:Harbin Institute of Technology,2011.
[5]李培.大型星载环形桁架天线展开动力学研究[D].北京:北京理工大学,2016.Li P.Deployment dynamics of the large-scale hoop truss antenna of satellite[D].Beijing:Beijing Institute of Technology,2016.
[6]Pellegrino S.Review of form-finding methods for tensegrity structures[J].International Journal of Space Structures,2003,18(4):209-223.
[7]Linkwitz K.Formfinding by the “direct approach” and pertinent strategies for the conceptual design of Prestressed and hanging structures[J].International Journal of Space Structures,1999,14(2):73-87.
[8]Morterolle S,Maurin B,Quirant J,et al.Numerical form-finding of geotensoid tension truss for mesh reflector[J].Acta Astronautica,2012,76(4):154-163.
[9]李团结,周懋花,段宝岩.可展天线的柔性索网结构找形分析方法[J].宇航学报,2008,29(3):794-798.Li T J,Zhou M H,Duan B Y.A method of form-finding analysis for flexible cable net structures of deployable antennas[J].Journal of Astronautics,2008,29(3):794-798.
[10]杨东武,仇原鹰,段宝岩.索网式天线结构预拉力优化的新方法[J].西安电子科技大学学报,2008,35(2):319-323.Yang D W,Qiu Y Y,Duan B Y.Optimal design of cable pre-tensions of the tension truss antenna[J].Journal of Xidian University,2008,35(2):319-323.
[11]Li,P,Liu,C,Tian,Q.et al.Dynamics of a deployable mesh reflector of satellite antenna:form finding and modal analysis[J].Journal of Computational and Nonlinear Dynamics.2016,11(4):041017.
[12]Neto M A,Ambrósio J A C,Leal R P.Composite materials in flexible multibody systems[J].Computer Methods in Applied Mechanics and Engineering,2006,195(50-51):6860-6873.
[13]Jin M,Ando K,Senbokuya Y,et al.Deployment analysis of large space antenna using flexible multibody dynamics simulation[J].Acta Astronautica,2000,47(1):19-26.
[14]Meguro A,Shintate K,Usui M,et al.In-orbit deployment characteristics of large deployable antenna reflector onboard Engineering Test Satellite VIII[J].Acta Astronautica,2009,65(9-10):1306-1316.
[15]Li P,Liu C,Tian Q,et al.Dynamics of a deployable mesh reflector of satellite antenna:parallel computation and deployment simulation[J].Journal of Computational and Nonlinear Dynamics,2016,11(6):061005
[16]陈钦,杨乐平.空间绳网系统发射动力学问题研究[J].宇航学报,2009,30(05):1829-1833.Chen Q,Yang L P.Research on Casting Dynamics of Orbital Net Systems[J].Acta Astronautica,2009,30(05):1829-1833.
[17]Shabana A A.Flexible multibody dynamics:review of past and recent developments[J].Multibody System Dynamics,1997,1(1):189-222.
[18]刘铖,田强,胡海岩.基于绝对节点坐标的多柔体系统动力学高效计算方法[J].力学学报,2010,42(06):1197-1205.Liu C,Tian Q,Hu H Y.Efficient computational method for dynamics of flexible multibody systems based on absolute nodal coordinate.Chinese Journal of Theoretical and Applied Mechanics,2010,42(6):1197-1205.
[19]Hughes T J R,Cottrell J A,Bazilevs Y.Isogeometric analysis:CAD,finite elements,NURBS,exact geometry and mesh refinement[J].Computer Methods in Applied Mechanics & Engineering,2005,194(39-41):4135-4195.
[20]Shabana A A,Yakoub R Y.Three dimensional absolute nodal coordinate formulation for beam elements:theory[J].Journal of Mechanical Design,2001,123(4):614-621.
Research on Form-Finding and Deployment Dynamics for Modular Cable-Truss Antenna
CHANG Hanjing1,WANG Bi2,LUO Kai1,TIAN Qiang1,HU Haiyan1
(1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China;2.Aerospace System Engineering Shanghai,Shanghai 201108,China)
In recent years,large deployable space structures such as modular space deployable antenna has great development potential to meet the nation’s requirements in future space technology.The modular space deployable antenna is a rigid-flexible coupling multi-body system mainly composed of flexible supported truss,cable-net structure,metal mesh reflector and rigid joints.In order to indicate the dynamic response of the space deployable antenna,an asymptotic iterative form-finding method is proposed based on the force density method,and the rigid-flexible truss is modeling in the frame of the absolute nodal coordinate formulation.Besides,the cable-net structure is modeling with NURBS (Non-Uniform Rational B-Splines) cable element.Further more,,the dynamic differential algebraic equations of the rigid-flexible system are established based on the first Lagrangian’s equation,and the generalized -α method is used for the high-performance numerical integration.Finally,the dynamic deployable response of the modular cable-truss antenna is studied.
cable-truss antenna;form-finding method;deployment dynamics;isogeometric analysis
O313.7
A
2095-7777(2017)04-0325-08
10.15982/j.issn.2095-7777.2017.04.003
常汉江,王碧,罗凯,等.模块化桁架索网天线找形与展开动力学研究[J].深空探测学报,2017,4(4):325-332.
Reference format:Chang H J,Wang B,Luo K,et al.Research on form-finding and deployment dynamics for modular cable-truss antenna[J].Journal of Deep Space Exploration,2017,4(4):325-332.
2017-03-02
2017-05-12
国家自然科学基金资助项目(11290151)
常汉江(1989- ),男,博士研究生,主要研究方向:基于等几何分析方法的空间结构动力学理论及应用研究。
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68915516
E-mail:hanjiangchang@163.com
[责任编辑:高莎,英文审校:朱恬]
猜你喜欢
科学技术创新(2021年15期)2021-06-25 06:44:26
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
无线电通信技术(2015年3期)2015-12-23 11:37:02
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
河南科技(2014年3期)2014-02-27 14:05:55
合肥工业大学学报(自然科学版)(2012年10期)2012-09-28 04:57:00
无线电工程(2011年3期)2011-06-13 11:58:18
湖南文理学院学报(自然科学版)(2010年3期)2010-05-09 07:51:16
