水下设备悬垂法安装动力定位耦合数值模拟
2017-12-06 06:45:28孙丽萍朱枭猛艾尚茂李彬
哈尔滨工程大学学报 2017年11期
孙丽萍,朱枭猛,艾尚茂,李彬
(1.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001; 2.哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
水下设备悬垂法安装动力定位耦合数值模拟
孙丽萍1,朱枭猛1,艾尚茂1,李彬2
(1.哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001; 2.哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
悬垂法是目前较为先进的深水、超深水大型水下装备安装方法,针对考虑安装船动力定位的悬垂法安装过程数值模拟问题,本文结合三维势流理论、集中质量法以及Morison方程建立了安装系统分析模型。利用PID控制器模拟动力定位系统,设计了推力分配单元,并考虑动力定位对安装系统的作用,最终实现安装船动力定位模式下的水下设备悬垂法安装时域耦合数值模拟。模拟结果显示:悬垂下放过程中安装缆张力逐渐增加,避免了突变载荷,且下放过程平缓;船的波频运动对安装系统影响较大;水下设备在下放初始阶段发生纵摇,且对横向载荷较为敏感;设备质量影响运动速度和纵摇振荡角度。
悬垂法; 动力定位; 水下安装; 时域耦合; 数值模拟; 推进器; 波频运动
海洋油气开发依赖于水下生产系统,其深水安装技术是建设生产系统的基础。悬垂法(pendulous installation method,PIM)作为一种新型水下设备安装方法,具有成本低、适用深水、避免共振,且对安装船舶要求较低,施工方便等优点,适合对水下增压系统、管汇等大型水下设备进行深水安装[1],然而该方法实际案例较少,仍需进行深入研究。
Petrobras公司利用数值模拟、水池试验研究了管汇的水动力性能以及不同形状物体下放运动特征及缆索受力等,并进行全尺寸模型试验,最终利用PIM法成功将重达280 t和200 t的水下管汇安装至1 845 m及1 900 m水深[2-4]。国内学者利用Fluent、Moses等软件对PIM法安装过程中船-缆-体耦合系统进行模拟[5-6];对水下分离器PIM法下放过程进行风险分析,建立了风险评估体系[7]。
悬垂法安装水深较大,锚泊定位将不适用,且锚泊线易与安装缆干涉,因此安装船舶需利用动力定位(dynamic positioning,DP)系统保持位置及艏向,在PIM法安装中对动力定位过程的模拟具有重要意义。
本文建立安装系统数学模型,然后建立DP系统简化模型。在起重船动力定位模式下,进行吊放作业时域耦合数值模拟。在三用工作船动力定位模式下,进行水下设备悬垂运动下放过程时域耦合数值模拟。解决了PIM法安装中吊放作业及悬垂运动与水面船舶动力定位的耦合问题。得到运动、推力和缆张力等计算结果,分析了运动相互影响以及安装缆张力的影响,并进行敏感性分析。
1 安装系统数学模型
水下设备PIM法安装作业涉及相关船舶在吊放以及悬垂下放过程中进行六自由度运动,其运动方程为[8]


式中:M为包含附加质量的船体惯性矩阵,C(ν)为科里奥利向心力矩阵,D(ν)为阻尼矩阵,g(η)为回复力,τ为船舶所受载荷,η为地球固定坐标系下船舶位置,v为随体坐标系下船舶运动速度,J为坐标转换矩阵。
通常船舶在海上作业将受到波浪、风和流的影响,一阶波浪力影响船舶波频运动,二阶波浪力、风力、流力和推进器推力影响船舶低频运动[9]。DP系统主要对船舶低频运动进行控制。
一阶波浪力采用三维势流理论进行求解。认为不规则波是若干规则波的叠加,设规则波数为N,ωj、aj分别为波谱中各规则波频率与波幅,fj为与之对应的Froude-Krylov力和绕射力,εj为随机相位角,则一阶波浪力的计算公式为
采用二次传递函数计算二阶波浪力,忽略和频力,根据Newman近似有二阶波浪力计算公式[10]:

式中Tjj为传递函数。
根据OCIMF规范推荐方法求解风和流载荷[11]:
式中:Cx、Cy、Cm为风/流力系数,ρ为流体密度,V为相对速度,Ax、Ay、Am为受力面积。
安装缆采用集中质量法进行动态分析,假设缆线由若干集中质量点和无质量直线段缆元组成[12]。缆元仅模拟缆线轴向和扭转特性,质量、重力、浮力、流体作用力等均集中作用于缆元两端节点处。
缆元中轴向弹簧阻尼单元的有效张力为


缆元间弯矩为

缆元扭矩为

式中:Kr为扭转刚度,τ为扭转角,L0为单元初始长度,Dr为扭转阻尼。
作用于缆线的阻力采用Morison方程求解。
附加质量的影响通常在局部x、y、z方向上分别计算,对于每个方向缆元受缆加速度引起的额外惯性力和周围流体加速运动的作用力。各方向附加质量作用为
Fa=CaMFAL+(1+Ca)MFAF
式中:Ca是该方向附加质量系数,MF流体质量,AL为该方向缆加速度分量,AF为该方向流体加速度分量。
水下安装设备进行刚体六自由度运动,流体力采用Morison方程求解。
水面工作船舶、安装缆、水下设备组成水下安装系统,该系统的运动方程为
M(p,a)+C(p,v)+K(p)=F(p,v,t)
式中:M为系统惯性力,C为系统阻尼力,K为系统刚度力,p、v、a分别为位置、速度和加速度,t为时间。
2 动力定位系统
本文采用PID控制器模拟DP控制系统:

DP船舶的运动系统通常是过驱动的,将推力分配转化为最优化问题来求解。目标是在各推进器发出所需总推力和力矩的同时达到最低的能源消耗,同时减小机械磨损。推力分配目标函数为[14]
约束条件为推力及变化率上下限、角度及变化率上下限。其中s=τ-B(α)u,τ为总推力,B为方位角矩阵,α为各推进器方位角,u为各推进器推力。三用工作船主推进器为桨舵组合,并配备三台槽道推进器。起重船采用七台全回转推进器,如图1所示。

图1 起重船推进器位置Fig.1 Position of thrusters on crane vessel
3 悬垂法安装时域模拟
PIM法安装初始状态如图2所示,水下设备被起重船吊放至水深50 m处,三用工作船利用DP系统稳定在预定位置。切断起重船吊缆,安装设备即开始摆锤下放运动。

图2 初始状态Fig.2 Initial condition
安装设备基本参数如表1所示。起重船总长205 m,垂线间长185 m,型宽39.2 m,吃水8.1 m, 排水量48 430 t。与三用工作船的主尺度以及推进器配置参数分别如表2所示。
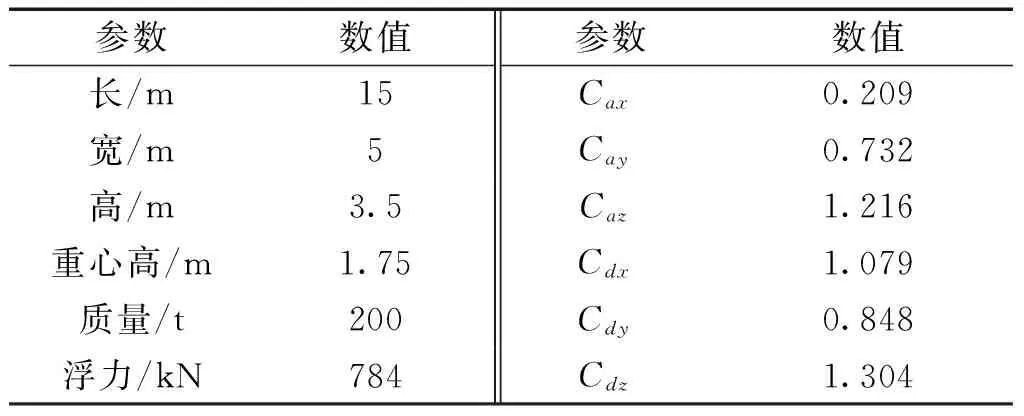
表1 安装设备基本参数

表2 三用工作船主要参数
安装缆由三种成分组成,连接安装船的部分为链,中间部分为聚酯缆,下端为钢缆。这样既可以保证安装缆强度,又能降低重量并避免共振。安装缆的各部分参数如表3所示。

表3 安装缆主要参数
该设备目标安装海域水深1 500 m,风速10 m/s,采用JONSWAP波能谱模拟海浪不规则波,有义波高1.5 m,谱峰周期6.7 s,各深度流速如表4所示。假设风、浪、流载荷沿同一方向作用于安装系统。为保证水下悬垂下放安全施工,设环境载荷方向为180°,即安装船处于迎浪状态。

表4 海流速度
4 计算结果与讨论
4.1吊放过程数值模拟
设备通过起重船吊机以0.1 m/s速度下放至水下50 m,之后保持10 min以校核吊缆张力。吊放过程总模拟时间设为1 200 s。
图3展示了起重船纵向运动和纵向总推力。起重船在DP系统控制下,纵向运动具有1 m以内的定位精度。设备吊放过程对起重船升沉及纵摇平衡位置影响很小,主要由于其重量远小于起重船排水量。推进器在该海况下处于低功率状态,最大总推力132 kN,有很大余量保证吊放过程的定位精度。
图4展示了水下设备吊放过程的垂向位移、垂向速度、纵向位移和纵向速度。设备垂向运动受到起重船升沉及纵摇影响,而纵向运动则受起重船纵向运动影响,其运动趋势与起重船相吻合。

图3 起重船计算结果Fig.3 Simulation results of crane vessel

图4 水下设备计算结果Fig.4 Simulation results of subsea equipment
图5为吊缆张力曲线,张力随起重船及水下设备运动而产生动态响应,作业过程缆张力处于安全范围内,且水下设备入水后浮力增加导致张力降低。

图5 吊缆张力Fig.5 Sling tension
4.2悬垂下放过程数值模拟
水下设备悬垂下放过程中,三用工作船处于DP模式。图6(a)~(c)展示了工作船水平三自由度运动曲线。设备对工作船纵向运动影响较大。下放初始阶段由于缆未完全张紧,安装物对工作船影响较小。安装缆逐渐张紧时工作船受到纵向外载荷而产生较大位移,达到5.2 m,DP系统具有足够定位能力,使其位置稳定。由图6(d)、(e)知设备及缆对工作船纵摇及垂荡平衡位置发生变化。滤波后得到纵摇平衡位置变为-0.4°,垂荡平衡位置变为-0.1 m。图7为工作船水平方向总控制力。工作船受环境载荷及水下设备作用发生纵向位移,纵向推力随之大幅增加。纵向最大总推力达到751 kN。
图8(a)、(b)展示了水下设备悬垂法安装下摆运动过程中垂向速度与纵向速度时历。在接近海底时,水下设备开始出现高频垂向震荡,这种震荡主要由于工作船运动导致。下放初期,由于安装缆并未完全拉紧,工作船的运动对水下设备影响很小。此外,在下放初始阶段,受流体及安装缆共同作用产生力矩导致水下设备出现纵摇振荡,随下放过程的进行,纵摇角度逐渐恢复为零,如图8(c)所示。图8(d)展示了水下设备的运动轨迹,并对初始阶段前33 s进行了逐帧示意,图中可以发现水下设备在悬垂下放的初始阶段产生了类似羽毛在空气中下落的飘荡运动。

图6 三用工作船运动曲线Fig.6 Motion curves of AHTS
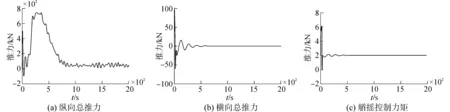
图7 三用工作船推进器总控制力Fig.7 Resulting control forces of AHTS
PIM法安装过程中,安装缆结构的可靠性关系着水下设备安装过程中的安全性。图9(a)为安装缆张力时历曲线。图9(b)安装缆最大张力校核,展示了安装缆各个长度位置下整个模拟过程中的最大张力,其中0 m位置表示安装缆上端。分析图9(a)可知工作船波频运动对安装缆张力影响较大,使其在安装设备稳定在水下后出现高频振荡。图9(c)为安装缆张力经傅里叶变换后得到安装缆张力谱曲线。安装缆在0.67~1.21 rad/s频率范围内响应较大,而该频率对应于工作船高频运动频率,印证了悬垂法中工作船的波频运动对安装缆张力影响较大的结论。
为验证计算模型的通用性,进行敏感性分析,主要考虑不同设备质量、波浪周期以及环境载荷方向对结果的影响。表5为设备质量影响,结果显示随着质量增加,最大垂向速度增加,最大纵摇角减小。图10展示了不同波浪周期下安装缆张力,波浪周期影响张力动态范围。图11展示了环境载荷方向对设备水平运动轨迹的影响,设备水下运动对横向载荷敏感。

表5 设备质量影响
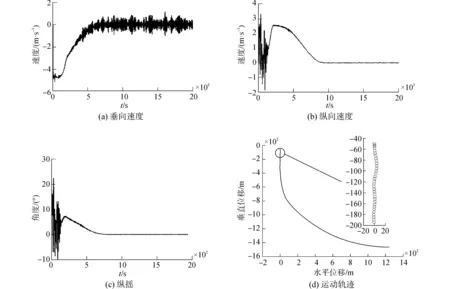
图8 水下设备计算结果Fig.8 Simulation results of subsea equipment
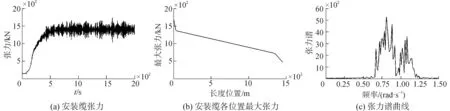
图9 安装缆张力计算结果Fig.9 Simulation results of line tension

图10 波浪周期对缆张力影响Fig.10 Influence of wave period on line tension
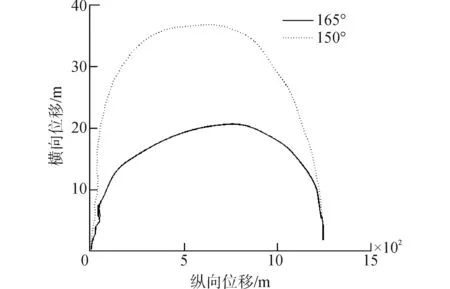
图11 环境载荷方向影响Fig.11 Influence of environment load direction
5 结论
1)水下设备纵向运动趋势与起重船基本一致。
2)在悬垂下放过程中,水下设备及安装缆主要影响工作船纵荡、纵摇及垂荡运动,安装缆逐渐张紧使工作船产生较大纵向位移,推进器纵向控制力明显增大,DP系统将工作船稳定在指定位置。
3)水下设备在下放初始阶段产生纵摇振荡;安装缆、水下设备受流体阻力作用,其摆锤下落运动过程较为平缓,下放需要一定时间;下放阶段对横向载荷较为敏感;安装缆张力在下放过程中逐渐增加,避免了突变载荷。
4)工作船波频运动导致安装缆张力产生动态响应,本文范围内波浪周期增大时缆张力动态范围增大。
5)随着设备质量增加,最大垂向速度增加,最大纵摇角反而减小。
[1] WANG A M, ZHU S H, ZHU X H, et al. Pendulous installation method and its installation analysis for a deepwater manifold in South China Sea[C]// Proceedings of the 23rd International Offshore and Polar Engineering. Alaska, USA, 2013: 774-784.
[2] FERNANDE A C, SALES J S Jr. The concomitant model testing approach for the development of the pendulous installation method of heavy devices in deep water[C]// Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering. California, USA, 2007: 489-497.
[3] FERNANDE A C, MINEIRO F P, RIBEIRO M. Estimation of the added mass and drag coefficients relevant to the pendulous installation method by several experimental and numerical methods[C]// Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering. Hamburg, Germany, 2006.
[4] FERNANDE A C, NEVES C R, SALES J S Jr, et al. Installation of deepwater manifolds by the pendulous method under the light of deep ocean basin model testing and numerical[C]// Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering. Hamburg, Germany, 2006.
[5] 姚丽琳. 深水水下安装下放运动分析技术研究[D]. 上海:上海交通大学, 2011.
YAO Lilin. Research on hydrodynamic analysis of subsea deepwater installation[D]. Shanghai: Shanghai JiaoTong University, 2011.
[6] 张万里. 基于多体非线性耦合理论的下垂式安装方法数值模拟[D].天津:天津大学, 2012.
ZHANG Wanli. Numerical anaysis of pendulous installation method based on nonlinear multi-body coupling theory[D]. Tianjin: Tianjin University, 2012.
[7] 赵梦一, 葛玖浩, 李伟, 等. 超深水水下分离器摆锤法下放风险分析[J]. 中国安全生产科学技术, 2015, 11(9): 151-157.
ZHAO Mengyi, GE Jiuhao, LI Wei, et al. Risk assessment on pendulous installation of subsea separator in ultra deepwater[J]. Journal of safety science and technology, 2015, 11(9): 151-157.
[8] FOSSEN T I. Guidance and control of ocean vehicles[M]. UK: John Wiley and Sons, 1994.
[9] FALTINSEN. Sea loads on ships and offshore structures[M]. UK: Cambridge University Press, 1990.
[10] SØRENSEN A J. A survey of dynamic positioning control systems[J]. Annual reviews in control, 2011, 35(1): 123-136.
[11] OCIMF. Prediction of wind and current loads on VLCCs[S]. London: Witherby & Co., 1994.
[12] 宋林峰, 孙丽萍, 王德军. 深水S型铺管托管架-船体-管线耦合分析[J]. 哈尔滨工程大学学报, 2013, 34(4): 451-420.
SONG Linfeng, SUN Liping, WANG Dejun. Coupling analysis of stinger-lay barge-pipeline of S-lay installation in deep water[J]. Journal of Harbin Engineering University, 2013, 34(4): 451-420.
[13] WU C L, SUN L P, AI S M, et al. Coupling motion analysis on a dynamic-positioning S-laying[J]. Journal of ship mechanics, 2015, 19(3): 249-263.
[14] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M].West Sussex:John Wiley & Sons, 2011.
本文引用格式:
孙丽萍,朱枭猛,艾尚茂,等. 水下设备悬垂法安装动力定位耦合数值模拟[J]. 哈尔滨工程大学学报, 2017, 38(11): 1689-1695.
SUN Liping, ZHU Xiaomeng, AI Shangmao, et al. Coupled numerical simulation of pendulous installation method for subsea equipment with dynamic positioning[J]. Journal of Harbin Engineering University, 2017, 38(11): 1689-1695.
Couplednumericalsimulationofpendulousinstallationmethodforsubseaequipmentwithdynamicpositioning
SUN Liping1, ZHU Xiaomeng1, AI Shangmao1, LI Bin2
(1.College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China; 2.Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University, Harbin 150001, China)
The pendulous installation method is advanced for lowering large subsea equipment in deepwater and ultra-deepwater, which has a few successful cases. In order to implement the numerical simulation of pendulous installation considering the dynamic positioning process of vessel, the analysis model was established based on three-dimensional potential theory, lumped mass method and Morison equations. PID controller was employed and the thrust allocation unit was designed in the dynamic positioning system of the vessel. The effect of the dynamic positioning on the installation system was taken into account comprehensively. The coupled time domain simulation of pendulous installation of the equipment was accomplished with the vessels operating in dynamic positioning mode. The results show that the tension increases gradually and sudden load is avoided. The lowering progress is smooth. The wave frequency motion has great influence on the installation system. Pitch occurs at the initial period of the pendulous motion. The motion is sensitive to lateral loads. The velocity and pitch fluttering angle are influenced by the change of mass of equipment.
pendulous installation method; dynamic positioning; subsea installation; coupled time domain; numerical simulation; thrusters; wave frequency motion
10.11990/jheu.201608052
http://www.cnki.net/kcms/detail/23.1390.u.20170427.1321.010.html
U661
A
1006-7043(2017)11-1689-07
2016-08-25.
网络出版日期:2017-04-27.
国家高技术船舶科研计划项目(KY10100150023).
孙丽萍(1962-), 女, 教授,博士生导师;
朱枭猛(1988-), 男,博士研究生.
朱枭猛,E-mail: gavinzhu@126.com.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:58
舰船科学技术(2021年12期)2021-03-29 01:28:38
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
中华诗词(2018年4期)2018-08-17 08:04:12
当代陕西(2018年12期)2018-08-04 05:49:08
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
海洋工程装备与技术(2017年5期)2017-03-05 09:49:39
学习月刊(2015年10期)2015-07-09 03:35:12
电子设计工程(2014年17期)2014-02-27 12:00:03