串级控制系统两步整定法的仿真研究
2017-12-05 15:14杨海勇
东方教育 2017年19期
关键词:Matlab仿真
杨海勇
摘要:过程控制系统的PID参数整定问题,是系统运行过程中的重要问题,只有合适的PID参数,才能确保系统具有较高的控制质量。本文介绍利用仿真软件MATLAB/Simulink对串级控制系统的参数整定进行仿真研究的方法和步骤,具体给出了串级系统的仿真模型,按两步整定法,结合每一步中所用的经验凑试法,得出控制质量良好的仿真结果。
关键词:串级系统;两步整定法;MATLAB仿真
一、引言
过程控制作为自动化的一个重要方向,其控制策略是非常丰富的,在过程控制实际工程应用中,不仅要选用恰当的控制方案,还需要整定好调节器的 PID参数,才能得到令人满意的控制质量。因此,整定PID参数,是系统投运后的重要事项,需要我们足够的重视,相关的整定方法有两种。
理论计算法需要获取对象的动态特性,采用频率特性法或根轨迹法等计算,费时费力,在工程实际中并不适用。工程整定法是一种相对比较方便实用的方法,无需对象的特性,可以在闭合回路中整定,包括衰减曲线法、凑试法。
在具体过程控制的教学和实训时,因为过程控制生产设备的安全性要求和限制,使得控制器的参数整定方法并不能实际操作训练;而过程控制实验装置的小型化简易化,则使得参数整定的实验效果不理想。利用仿真技术的快捷有效,可以解决这类参数整定问题,有助于我们高效的学习训练。
单回路系统的衰减曲线法和经验凑试法是基础整定方法,相关仿真研究已经比较多,这里只作简要介绍。本文主要针对串级系统,利用MATLAB软件,对两步整定法进行分析仿真。
二、常用整定方法简介
衰减曲线法和凑试法都是单回路系统的主要整定方法,两种方法的首要步骤很相似,都是在纯比例作用下,给定值为阶跃扰动,将系统投入闭环运行,并逐步增大比例控制作用(即增大 Kp),直到得到衰减比为 4:1的响应曲线。一般认为,衰减率为0.75的系统的稳定性已经足够,此时衰减比为4:1,能达到整定要求。
后续对于衰减曲线法,是根据第一步记录下来的比例带以及衰减周期 ,查询相关的数据经验表,再求出δ、Ti 、Td三者的参数值。
对于经验凑试法,则是逐步加入适当的积分作用和微分作用,看响应曲线的表现调整PID参数,直到达到较高的控制质量。当然,这种方法比较灵活快速,但需要一定的熟练经验。
三、两步整定法的仿真
MATLAB是当前应用广泛的仿真软件, Simulink则是 MATLAB内嵌的一个功能完善的仿真建模环境,因为内含大量标准功能模块,能快捷地根据需要选用模块并构成仿真模型。
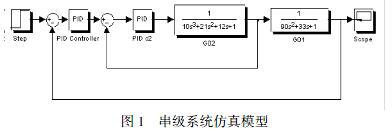
在MATLAB软件正常运行后,利用Simulink 命令打开库浏览器,再创建一个新的空白模型窗口。在各个子模块库中,根据需求,选出相关的各个标准模块,拖进新建窗口中,按图1所示连接,构成串级控制系统的模型。
图1中的Step模块的阶跃值设成1,作为系统的给定值信号。 用到的PID 模块并不在Simulink的标准库里,而是在附加库里,即Simulink Extras 库里的 Additional Linear 子模块库中。PID 模块内的三个参数分别为Kp、Ki、Kd,系数越大,相关控制作用越强。
对串级系统来说,按照两步整定法操作比较合适,具体方法是首先只针对副回路,整定好PID参数,再将副回路看成整体中的一个部分,只针对主回路,对主调节器参数进行整定。
具体在每一步每个回路的参数整定方法,都還是按基本的单回路系统的参数整定方法,具体如4:1衰减曲线法或者经验凑试法,本文采用更接近工程实际应用的经验凑试法,这样可以避免烦琐的计算,加快参数调试的速度。
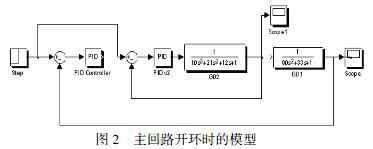
第一步,将主回路处于开环状态,只针对副回路,按照衰减曲线法,整定副调节器参数。构造的模型见图2。
不断试验,逐步调大副调节器的 Kp值,当 Kp2=10, 可以得到衰减比为4比1的响应曲线,见图3。这里的副调节器一般只选用比例控制规律就足够了,不用加入积分和微分控制规律, 因此设置积分系数 Ki2=0,微分系数 Kd2=0。
第二步,主回路闭环时,见图1。 此时按前面的整定结果,将参数设置为 Kp2=10, Ki2=0, Kd2=0,然后只针对主回路,整定其中的PID参数。
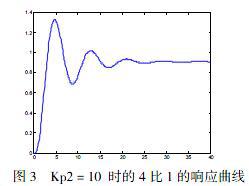
不断试验,当主调节器的Kp1 = 13 时,得到的响应曲线大约为4比1的衰减比,符合要求。 然后用凑试法加入适当积分作用Ki1=0.125后,仿真结果如图4所示,此时的超调量还是很大,控制效果不够理想。
为了进一步减小超调量,接下来考虑应该减小比例控制作用。经过不断调小Kp1参数并仿真实验,当Kp1 = 4, Ki1=0.125 , 能大幅减小超调量,控制质量有所提高。
最后加入适当微分作用,Kp1 = 4, Ki1=0.125 , Kd1 = 2, 仿真结果见图5。
从图5可以看出,系统的响应速度快,在较短的过渡过程时间内趋于稳定,没有余差,超调量约为2%,说明这个串级系统取得了预期的较好整定效果。
四、结语
利用MATLAB软件对串级控制系统的两步整定法进行仿真研究,步骤清楚,方法可靠,能得出良好的仿真结果,适用于过程控制课程的课堂教学演示和实验,也可以用于相关过程控制系统的培训工作。
参考文献:
[1]王正林,郭阳宽. 过程控制与SIMULINK应用[M]. 北京:电子工业出版社,2006.
[2]邵裕森,戴先中. 过程控制工程[M]. 北京:机械工业出版社,2000.
[3]李国勇,程永强. 计算机仿真技术与CAD [M]. 北京:电子工业出版社,2012.
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
科技视界(2016年21期)2016-10-17
电脑知识与技术(2016年12期)2016-06-14
电脑知识与技术(2016年9期)2016-05-18
考试周刊(2016年11期)2016-03-17
现代电子技术(2015年17期)2015-09-23
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年10期)2015-05-29
无线互联科技(2015年2期)2015-04-02