
永磁直驱风电系统中最大功率点跟踪控制优化的仿真研究*
2017-12-05 05:58:30臧晨静张惠娟李玲玲
电机与控制应用 2017年11期
臧晨静, 张惠娟, 李玲玲, 孙 浩, 赵 轩
(1. 河北工业大学 电磁场与电器可靠性省部共建重点实验室,天津 300130;2. 河北工业大学 电气工程学院,天津 300130)
永磁直驱风电系统中最大功率点跟踪控制优化的仿真研究*
臧晨静1, 张惠娟1, 李玲玲1, 孙 浩2, 赵 轩2
(1. 河北工业大学 电磁场与电器可靠性省部共建重点实验室,天津 300130;2. 河北工业大学 电气工程学院,天津 300130)
分析了风力机特性、永磁直驱电机模型、变换器控制策略及各种功率跟踪控制算法优缺点,并提出一种基于爬山搜索法的最大功率点跟踪(MPPT)控制方法的优化。在MATLAB/Simulink环境下搭建了永磁直驱风力发电系统模型,仿真分析了控制方法对最大功率点的跟踪效果,结果表明当风机起动及风速变化时MPPT控制方法能够使系统快速稳定在新的工作点,捕获得最大功率。由此验证了改进优化后的控制方法及所搭建模型的准确性与有效性。
风电系统;永磁直驱发电机;最大功率点跟踪控制;最大功率点跟踪优化
0 引 言
风能作为绿色可再生能源,将风能最大限度地转换为电能是该研究领域目前最关心的问题。但是风能的随机性、不稳定性和分布不均匀等特性给其利用带来许多问题。因此,对风力发电系统进行研究、开发,以最大限度捕获风能是非常必要的[1]。
永磁直驱风力发电系统较其他风力发电系统而言,具有转速可调、效率较高、控制灵活等特点[2]。在变速风电系统中最大功率点跟踪(Maximum Power Point Tracking,MPPT)的控制算法主要有3种[3]:功率信号反馈控制、叶尖速比控制、爬山搜索法控制。其中:功率信号反馈法需要知道风机的最大功率曲线,且对于不同的风机需要事先通过大量的试验测得,实现起来比较困难;叶尖速比法需知道风机的最佳叶尖速比曲线以及实时测量风速,在实际应用中风速很难准确测量到,所以实际应用此方法也较困难;爬山搜索法控制算法与风力机及发电机特性无关,对系统参数依赖性低,系统有自动跟随与自适应能力,但是对于在功率跟踪过程中步长的选择,往往不能同时兼顾快速性与稳定性。所以针对爬山搜索MPPT算法跟踪速度及稳定性的矛盾,将叶尖速比法与变步长爬山搜索法相结合,并将其与永磁直驱电机的零d轴矢量控制策略相结合,以控制电机转速使其获得最大功率,在MATLAB/Simulink 环境下仿真验证了提出的优化的MPPT控制方法的准确性与有效性。
1 风机相关特性
1.1风机获取的功率
风机是风力发电系统中获得风能并将获得的风能转换为电能的重要设备[4]。风机从风中捕获的机械功率表达式为
风机机械转矩:
式中:ω——风机旋转角速度;
R——风机叶片半径;
ρ——空气密度;
v——风速;
λ——叶尖速比,即风轮叶尖速度与风速之比。
1.2风能利用系数
由Betz理论可知,风能利用系数可以近似表示为

式中:θ——桨距角;
λi——中间变量。
当桨距角θ一定时,风能利用系数Cp是关于叶尖速比λ的函数,风能利用系数Cp与叶尖速比λ的关系图如图1所示。
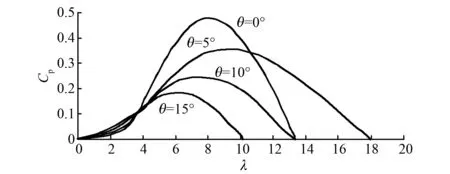
图1 风能利用系数与叶尖速比的关系
由以上分析可知,当桨距角取θ=0,且叶尖速比λ取得最佳值λopt≈0.81时,风能利用系数取得最大值Cpmax≈0.48,即此时风机捕获得最大风能。实际上风力机是不可能达到理论最大值的,因此一般风机的实际风能利用系数Cpmaxlt;0.48。
2 永磁直驱风力发电机模型及控制策略
2.1永磁直驱风力发电机dq轴数学模型
为便于研究分析,本文所采用的dq轴电机模型忽略电机本身漏磁通的影响,定子各相绕组的电感与通入绕组中的电流大小、相位均无关,定子各相绕组的电感、电枢电阻相等,永磁材料的电导率为零。根据以上假设和坐标变换理论,可得到永磁同步发电机在dq旋转坐标系下的数学模型[2,5]为
电磁转矩方程为

式中:ud、uq——电机定子电压d、q轴分量;
id、iq——电机定子电流d、q轴分量;
Rs——定子电阻;
Ld、Lq——电机d、q轴定子等效电感;
ω——电机电角速度;
φpm——永磁体磁链;
p——电机磁极对数。
文中采用零d轴电流(即id=0)矢量控制策略,使电机转矩控制得到简化,则有
对于同一个永磁电机来说φpm是定值,由式(7)可见,电磁转矩Te正比于q轴电流iq,因此,对永磁同步电机电磁转矩的控制,可通过控制电机定子电流q轴分量实现。
永磁同步发电机的运动方程为
式中:Tm——机械转矩;
J——转动惯量。
2.2变换器控制策略
永磁直驱风力发电系统变换器整体控制策略框图如图2所示。

图2 永磁直驱风力发电系统变换器控制框图
(1) 机侧控制:机侧变换器的主要作用是控制电机输出的有功功率,以实现最佳风能跟踪控制。
由式(5)可知机侧定子d、q轴电流id、iq除受电压ud、uq影响以外,还通过同步电感互相耦合。其中,iq还受到ωφpm影响,这不利于对电流的控制,因此,要对id、iq分别进行闭环PI调节控制,并分别加上交叉耦合电压-ωLqiq、ωLdid+ωφpm,补偿得到d、q轴控制电压分量ud、uq来实现d、q轴电流的闭环控制,此为控制系统的内环。控制系统外环则采用有功功率的闭环PI控制,见图2。
(2) 网侧控制:网侧变换器的主要作用是提供稳定的直流电压,并实现网侧功率因数调整及无功功率控制[6]。
网侧变换器采用电压定向矢量控制,取d轴方向与电网电压方向相同,则网侧电压q轴分量egq为0,所以dq坐标系下网侧变换器的有功、无功功率方程式为
式中:egd、egq——电网电压d、q轴分量;
igd、igq——电网电流d、q轴分量。

dq轴坐标系下网侧变换器的数学模型为
式中:Rg、Lg——网侧变换器进线电抗器电阻、电感;
ugd、ugq——网侧变换器d、q轴电压分量;
ωg——电网同步电角速度。
由式(10)可知,d、q轴电流igd、igq除受电压ugd、ugq影响以外,还通过电感互相耦合,igd还受到电网电压egd影响,这不利于对电流的控制,因此,要对igd、igq分别进行闭环PI调节控制,并分别加上耦合电压ωgLgigq+egd、-ωgLgigd补偿得到d、q轴控制电压ugd、ugq,见图2。
2.3MPPT控制优化
目前常用的叶尖速比法是通过将计算得到的风机实际叶尖速比λ与最优叶尖速比λopt比较,调节控制风机转速ω使叶尖速比λ保持最优。但是,此方法需要知道风机的最佳叶尖速比曲线及实时测量风速v,在实际应用中风速很难准确测量得到,所以实际应用此方法较困难。
爬山搜索法是根据在对风机转速施加一定扰动后观察输出功率的变化,决定风机转速的增减。不断施加扰动,最后使风机输出功率达到最大。此方法不需测量风速,且控制过程与风力机及发电机特性无关,对系统参数依赖性低,系统有自动跟随与自适应能力。但对于传统的爬山搜索法在功率跟踪的过程中步长的选择,往往不能同时兼顾快速性与稳定性。所以,针对爬山搜索MPPT算法跟踪速度及稳定性的矛盾,将叶尖速比法与变步长爬山搜索法相结合改进优化。
改进优化后的MPPT控制具体执行步骤如下。

(4) 计算ΔP/Δω。当|ΔP/Δω|≤δ时(文中取δ=0.01),视为系统工作于最大功率点;当|ΔP/Δω|gt;δ时,调整转速:ωref=ωn+sign(ΔP)sign(Δω)step,step=∣ΔP/Δω∣step0(step0为爬山搜索法的基础步长),直至|ΔP/Δω|≤δ,系统达到最大功率点。
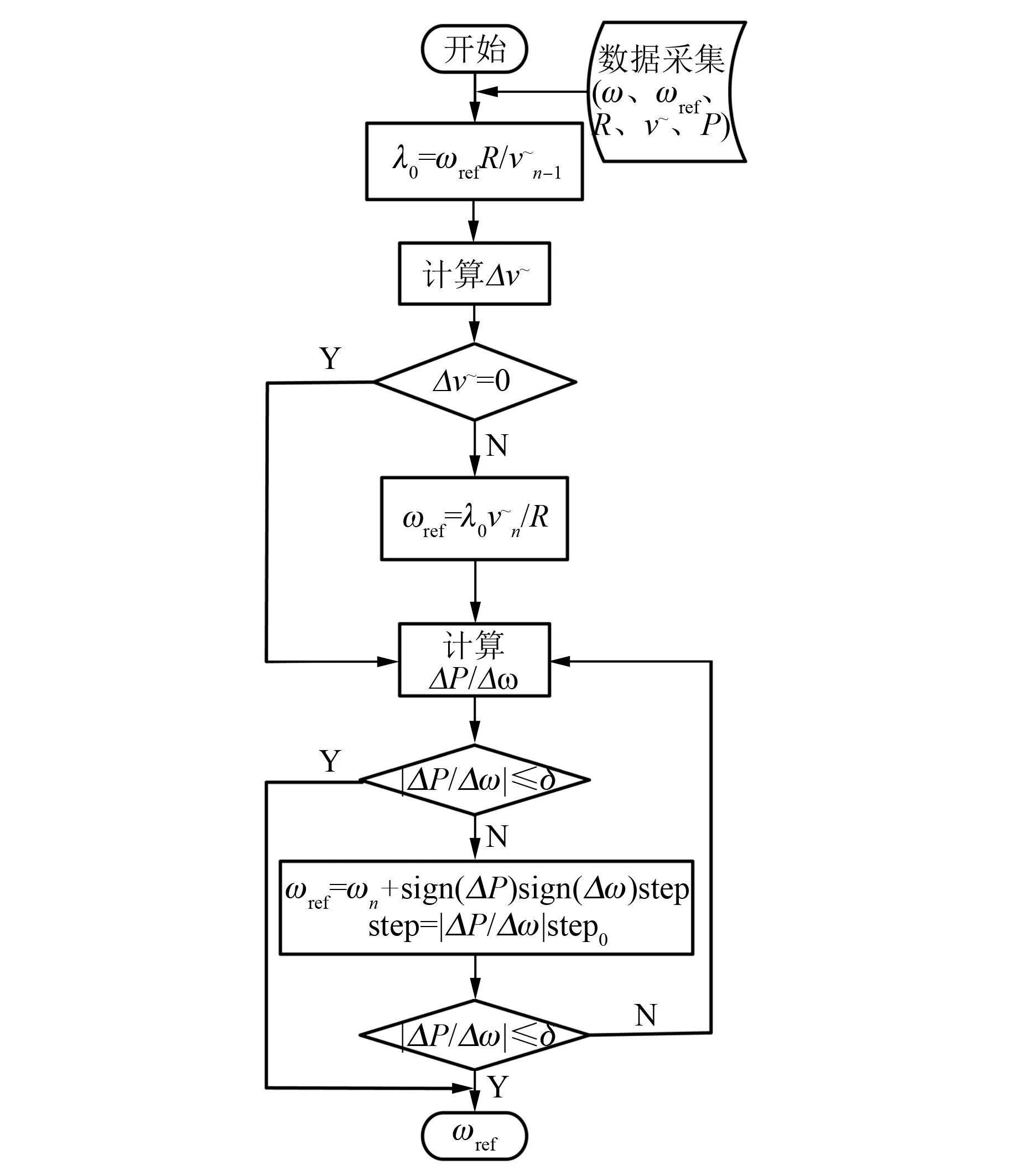
图3 MPPT控制流程图
(5) 结束,反馈ωref至系统。改进优化后MPPT控制流程如图3所示。改进优化的MPPT控制的优点是:加入初始叶尖速比,当风机起动或风速发生变化时,使风机快速跟踪到最大功率点附近,然后用变步长爬山搜索法精确调整得到转速的参考值ωref提供给机侧逆变器,使风机运行在最大功率处,减小步长的调整量,追踪过程同时兼顾了快速性与稳定性,且不需准确测量风速、预先知道风机参数特性,可适用于不同风机。
3 系统仿真模型及运行结果分析
利用 MATLAB/Simulink软件搭建了永磁直驱风力发电系统最大风能追踪仿真模型,运行仿真,分析了改进优化后的MPPT控制方法的性能。
3.1系统仿真模型
系统仿真模型主要由风机、永磁直驱电机、AC-DC-AC变换器及其控制模块构成。其中网侧逆变器主要控制中间直流电压ucd以及输出的无功功率。机侧逆变器主要控制永磁机转速,MPPT控制提供转速的参考值ωref给机侧逆变器,使系统跟踪在最大功率处。其中,改进优化后的MPPT控制模型图如图4所示。
系统仿真参数:网侧电压Unom=575 V,频率f=60 Hz,功率Pnom=1 500 kW,电抗器电阻Rg=0.003 Ω,电感Lg=0.3 H;中间直流电容电压ucd=1 150 V;电机定子电阻Rs=0.006 Ω,定子dq轴电感Ld=Lq=0.3 H,转动惯量J=3 500 kg·m2,磁通φpm=1.48 Wb;风机半径R=33.05 m。
3.2仿真结果及分析
仿真的风速变化如图5所示,初始为12 m/s,4 s时阶跃到15 m/s,7 s时又降到10 m/s。
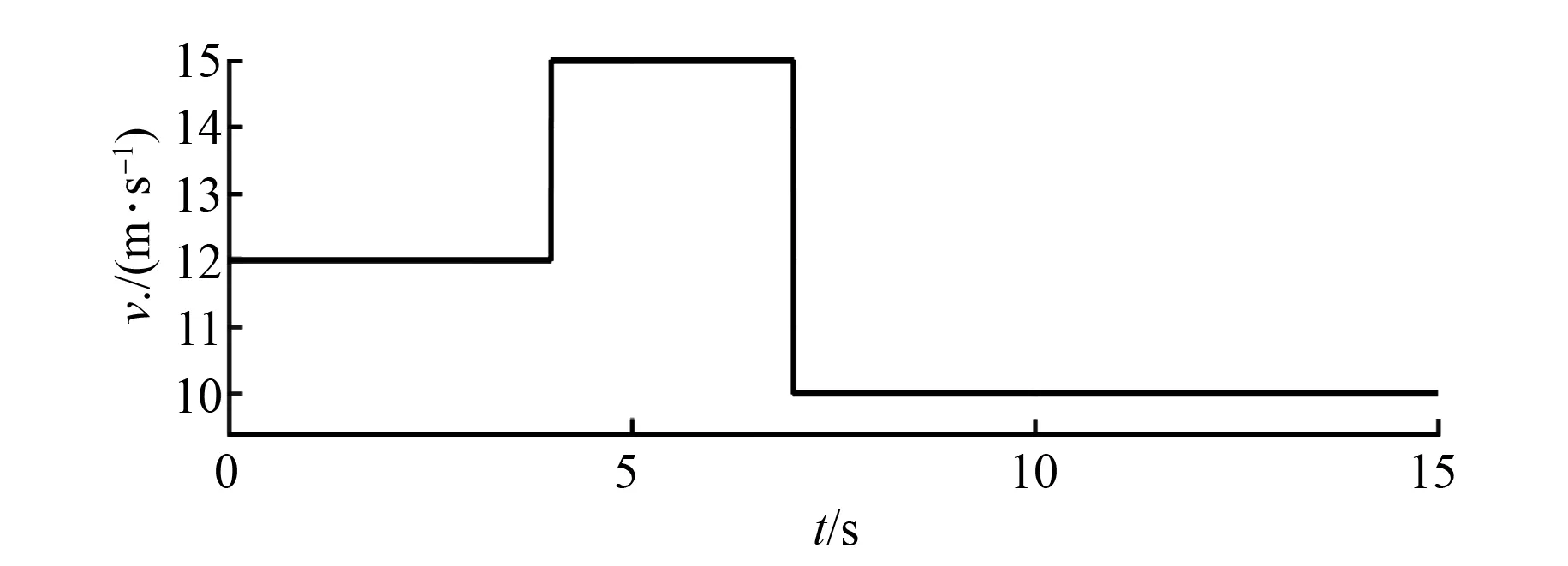
图5 风速变化图
在此输入风速下,由MPPT算法输出的转速参考值ωref(p.u.)如图6所示,由于引入了叶尖速比,转速参考值ωref在风机起动和风速瞬间变化时,可以快速、稳定地跟踪风速的变化。

图6 转速参考值变化图
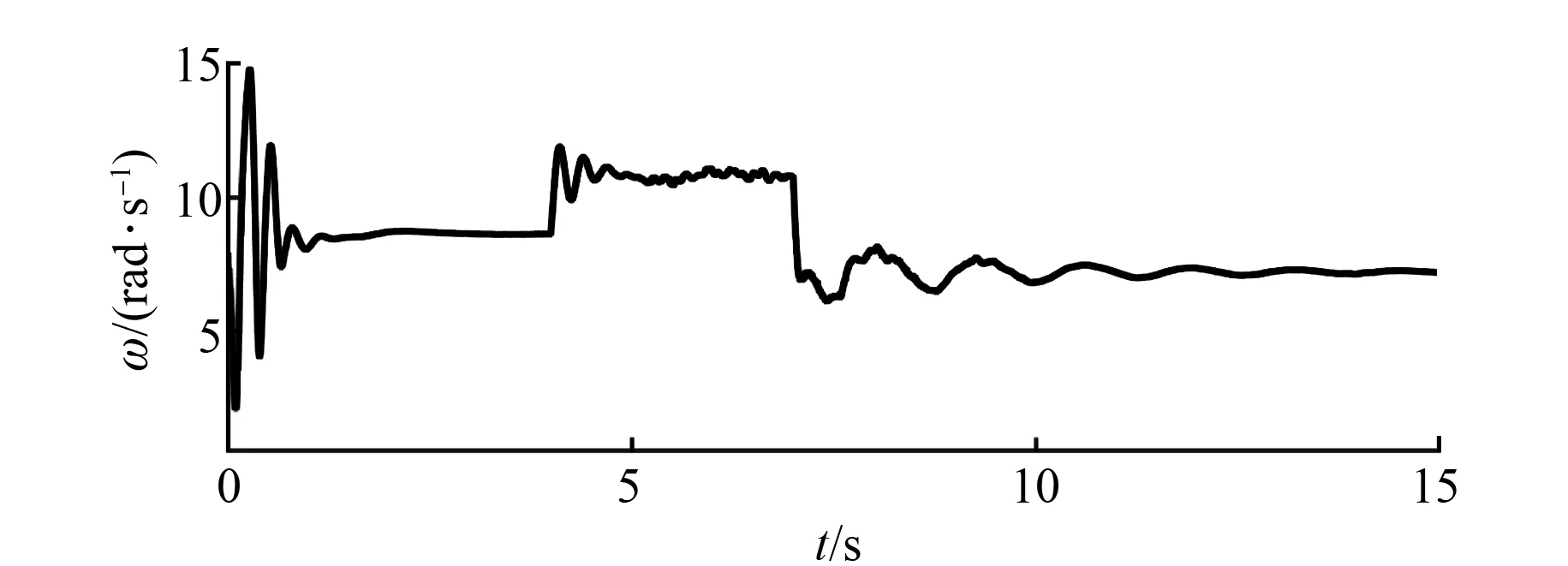
图7 电机转速变化图
电机的实际转速ω及输出电磁转矩Te变化分别如图7、图8所示,随着风速变化,调整电磁转矩控制电机转速,由机侧逆变器的控制,实际转速能随转速参考值ωref跟踪风速变化。初始有比较大振荡是因为在系统初始运转工作时,所有量的初始值都为零,并没有运行在稳态下,会有一个动态求解稳态的过程,所以在短时间内波动比较大,但系统很快跟踪风速变化趋于稳定。

图8 电机电磁转矩变化图
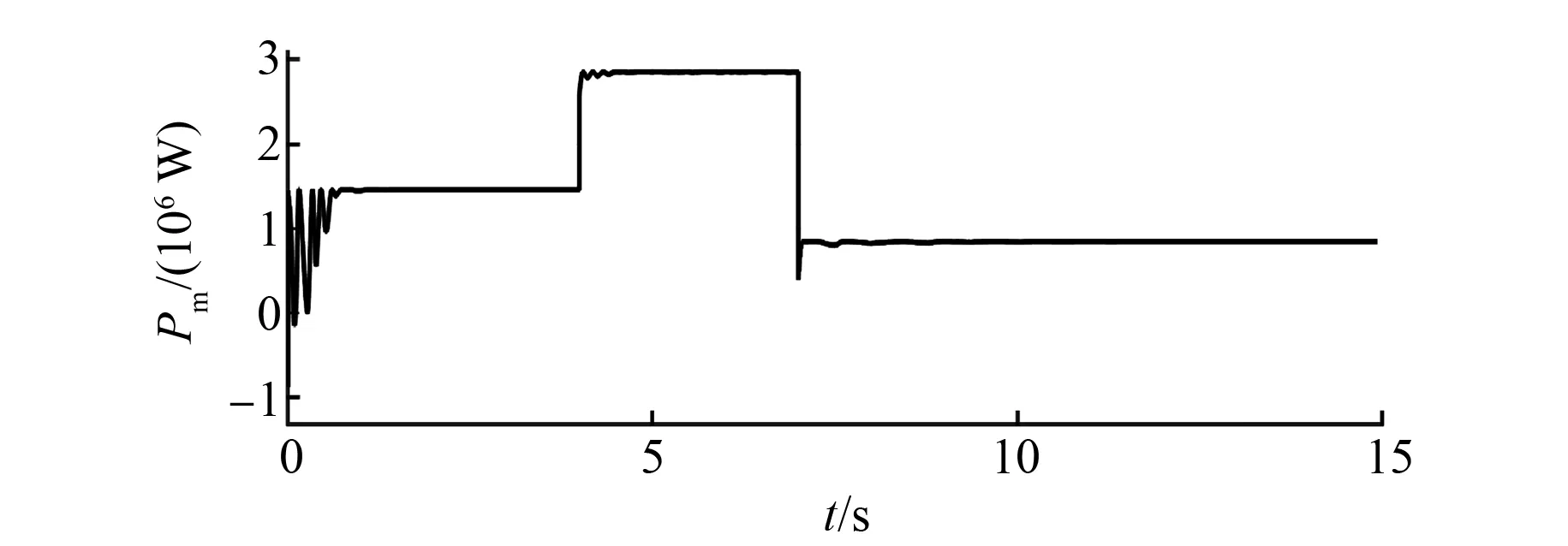
图9 风机机械功率变化图
风力机从风中捕获的机械功率Pm变化如图9所示,均能跟随风速变化迅速响应,根据式(1)计算得风速为12、15、10 m/s时风机可捕获的机械功率理论值分别为1.59×106、3.12×106、0.92×106W,而在本仿真中风机实际捕获的机械功率分别为1.46×106、2.85×106、0.85×106W,可知风机的功率跟踪性能良好,可捕获较大功率。
图10、图11分别为系统中叶尖速比及风能利用系数波形图。从图11中可以看出,风机起动时,风能利用系数Cp迅速从0增加并保持在0.44附近,同时叶尖速比基本保持在10.1附近,当风速变化时,λ、Cp波动较小,λ迅速恢复保持在10.1附近,Cp迅速恢复保持在0.44附近,这说明了风能利用系数与叶尖速比能很好的保持在最佳值,即该系统能较好地跟踪风速,实现最大功率跟踪。
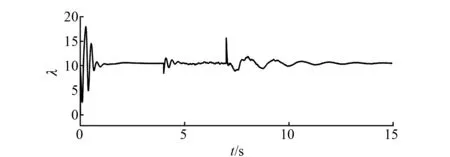
图10 叶尖速比波形图

图11 风能利用系数波形图
图12为输入电网的有功与无功功率随风速的变化图。无功功率得到准确控制,输出基本为零;有功随风速不断变化,响应时间短,跟踪速度快,实现了最佳风能跟踪控制。
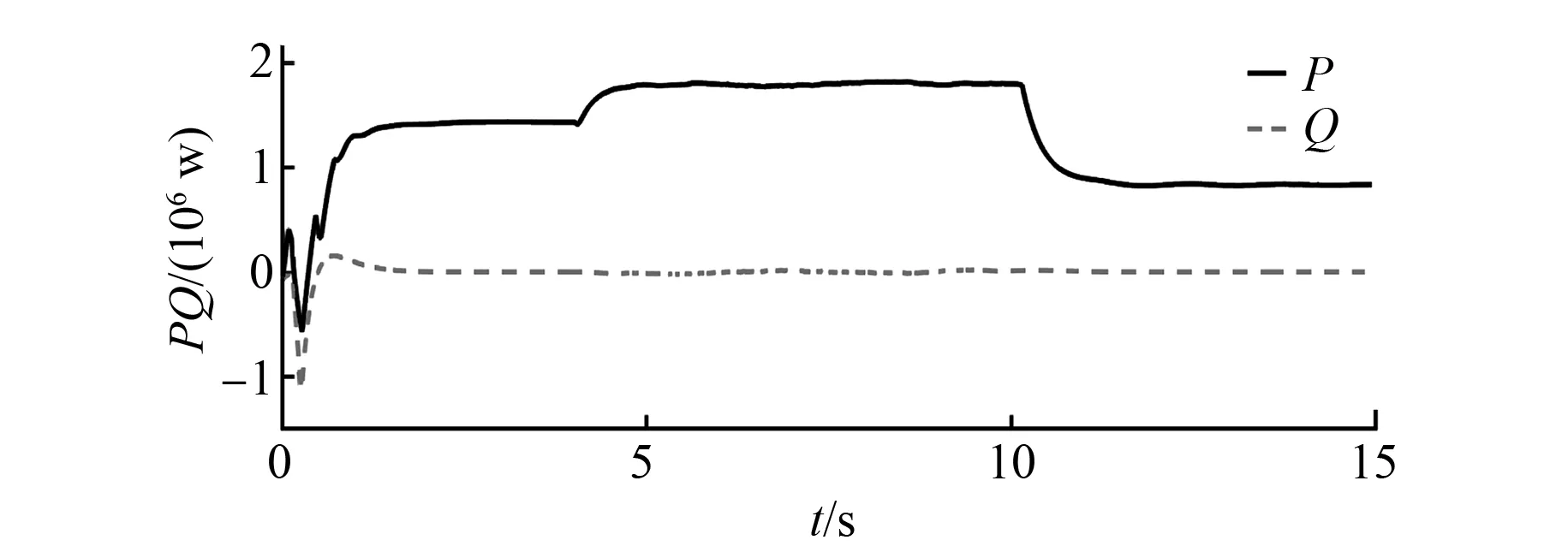
图12 输入电网有功与无功功率变化图
网侧变换器输出电压、电流变化如图13所示,其中(a)为0~15 s电压、电流变化图,(b)为3.95~4.15 s的电压、电流变化图,网侧电压基本保持1.0 p.u.稳定不变。电流随风速变化而变化,且正弦性良好,当风速变化时,网侧变换器输出的电流迅速增大,约在0.05 s内趋于稳定,动态响应性能良好,几乎是瞬时的,且电流频率基本稳定不变,系统实现了变速恒频发电运行。

图13 网侧电压、电流变化图
4 结 语
本文在对风机特性及永磁直驱电机模型分析的基础上,在MATLAB/Simulink中搭建了风力发电系统及改进优化的MPPT控制仿真模型,获得系统的相关仿真波形。仿真结果表明所提出的MPPT优化控制方法在风速变化时能迅速稳定地跟踪到最大功率,有效解决了MPPT控制快速性及稳定性的矛盾,提高了风力发电机组的风能转换效率,同时利用网侧变换器实现了并网无功功率控制,从而验证了所搭建模型及改进优化MPPT控制方法的准确性与有效性。
[1] 陈进美.永磁直驱风力发电系统仿真与控制研究[D].北京:华北电力大学,2012.
[2] 管维亚,吴峰,鞠平.直驱永磁风力发电系统仿真与优化控制[J].电力系统保护与控制,2014,42(9): 54-60.
[3] 吴政球,干磊,曾议,等.风力发电最大风能追踪综述[J].电力系统及其自动化学报,2009,21(4): 88-93.
[4] 叶杭治.风力发电机组的控制技术[M].北京:机械工业出版社,2006.
[5] 焦晓红,苏博.直驱永磁风力发电机最大功率跟踪的鲁棒控制[J].燕山大学学报,2012,36(5): 445-451.
[6] 王仲勋,沈锦飞.兆瓦级直驱式永磁同步风力发电控制系统研究[J].现代电子技术,2011,34(4): 201-207.
SimulationResearchonMaximumPowerPointTrackingOptimizationControlofDirect-DrivePermanentMagnetWindPowerSystem*
ZANGChenjing1,ZHANGHuijuan1,LILingling1,SUNHao2,ZHAOXuan2
(1. State Key Laboratory of Electromagnetic field and Apparatus Reliability, Hebei University of Technology,Tianjin 300130, China;2. School of Electrical Engineering, Hebei University of Technology, Tianjin 300130, China)
The characteristics of wind turbine, permanent magnet direct drive motor model, converter control strategy and the advantages and disadvantages of various power tracking control algorithms were analyzed. An optimization of maximum power point tracking (MPPT) control based on climbing search was proposed. The permanent magnet direct drive wind power generation system model was established and the tracking effect of the control method on the maximum power point was simulated by using MATLAB/Simulink. The result showed that the tracking control method could made the system get to new operating point fast and steady when the wind tubine starts or the wind speed changes and it could capture the maximum power of the wind energy. The control method and the correctness and effectiveness of the model had been verified.
windpowersystem;permanentmagnetdirect-drivegenerator;maximumpowerpointtrackingcontrol;maximumpowerpointtracking(MPPT)optimization
国家科技支撑计划项目子课题(2013BAF02B04);河北省科技计划项目(14214503D);天津市科技特派员项目(16JCTPJC50700)
臧晨静(1991—),女,硕士研究生,研究方向为电力系统及其自动化。张惠娟(1963—),女,博士,教授,硕士生导师,研究方向为电力系统及其自动化。
TM 641
A
1673-6540(2017)11- 0118- 06
2017 -05 -03
猜你喜欢
江苏船舶(2023年5期)2023-12-19 01:07:04
小火炬·智漫悦读(2023年3期)2023-05-29 02:00:09
小天使·五年级语数英综合(2021年9期)2021-09-18 20:59:12
燃气涡轮试验与研究(2019年5期)2019-12-01 02:12:36
创新作文(小学版)(2019年21期)2019-01-11 15:12:05
风机技术(2018年1期)2018-03-21 09:15:10
家教世界·创新阅读(2017年1期)2017-02-07 23:35:42
文理导航·科普童话(2016年3期)2016-04-26 16:45:42
汽车工程(2016年11期)2016-04-11 10:57:53
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:45
