
电动汽车动态工况的EMI测试技术需求与方案设计
2017-11-29 13:31邓俊泳林道祺刘国荣
中国测试 2017年11期
曾 博,邓俊泳,林道祺,林 青,刘国荣
(中国电器科学研究院有限公司,广东 广州 510275)
电动汽车动态工况的EMI测试技术需求与方案设计
曾 博,邓俊泳,林道祺,林 青,刘国荣
(中国电器科学研究院有限公司,广东 广州 510275)
针对电动汽车高度集成的电力驱动系统可能带来电磁兼容性问题,讨论国际上现行电动汽车电磁干扰(electromagnetic interference,EMI)测试标准中汽车工作状况设置,指出动态车辆工况设置及测试方法研究的必要性。并设计动态车辆工况信息直接、间接测量方案,实时获取车速νV、负载扭矩TV、制动力FS参数信息;其次,提出在动态车辆工况下特征频率提取采用实时频谱分析仪,最大发射值测量采用接收机的EMI测试方法;最后,提出读写时间戳法,实现动态车辆工况信息、EMI测试数据匹配。该集成方案可实现电动汽车动态工况下的EMI测试,且测试数据时间戳无累计误差。
电动汽车;动态工况;特征频率提取;发射值测量
0 引 言
电动汽车高度集成的电力驱动系统为电磁兼容(electromagnetic compatibility,EMC)测试带来巨大挑战。Guttowski S等[1]按照传统汽车EMC测试方法测试电动汽车,由于高压电力驱动系统,将导致测试结果一致性差;余绍峰等[2]发现驱动系统在不同功率下,电磁骚扰的绝对值及其对时间的变化率存在差别,在电磁兼容研究中应该引起重视;Ruddle A R等[3]讨论当前汽车电磁兼容标准,认为目前测试规范、方法对电动汽车动力系统考虑不充分,需要进一步发展;Iglesias M等[4]发现四轮驱动电动汽车EMC特性会影响其中控系统可靠性;文献[5]基于低于30MHz频段的电动汽车EMI测试标准分析,指出国际上EMI测量手段一致,测量对象、评价指标各有区别,SAE J551-5——2012还规定应测量电动汽车多种运行状况的电磁场要求[1]。本文将讨论国际上现行电动汽车EMI测试标准中汽车工作状况设置,进一步指出电动汽车EMI测试仪器的一些研究方向与热点。
1 电动汽车EMI测试工作状况与流程
当前,国际汽车整车EMI测试标准化组织包括国际无线电干扰特别委员会(international special committee on radio interference,CISPR)、 联合国欧洲经济委员会(economic commission of Europe,ECE)、美国机动车工程师学会(society of automotive engineers,SAE)、中国国家标准化管理委员会(standardization administration of China,SAC)等,其中 CISPR、ECE将电动汽车作为传统内燃机车辆的一类,以发动机转速描述车辆工作状况,规定了发动机恒速运转(巡航)、通电但不运转(N挡)2种工况,如ECE R10-04、CISPR 12——2009(GB/T 14023——2011)、CISPR 25——2008(GB/T 18655——2010)、CISPR 36(制定中);SAE体系早期标准SAE J551-5——2004、GB/T 18387——2008以车辆速度描述其工作状况,设定匀速巡航1种工况,在最新标准SAE J551-5——2012中,除巡航工况之外,又设置制动(制动压力)、怠速(负载扭矩)2种工况。表1~表3分别为各标准、CISPR与ECE体系标准、SAE体系标准规定的车辆工作状况。
SAE J551-5——2012中规定的测试流程为[6]:
1)按照表中特征频率提取的取值,设置车辆工作状况,测试各频率下的发射值。
2)根据第1)步扫描结果,计算发射场强度减去限值后的最大值(离限值线最近)所在频率。

表1 各标准规定的车辆工作状况

表2 欧洲体系标准规定的车辆工作状况

表3 SAE体系规定的车辆工作状况
3)依据第2)步所得的频率,在最大发射值测量规定范围内选择工况参数,测量最大射值。
4)重复步骤1)~3)进行另外3个侧面与其他场的测量。
可以看出,SAE J551-5——2012设置车辆制动、怠速、巡航3种工况,采用控制变量的方式,较好地模拟常规驾驶时的各种情况,一定程度上保证电动汽车在各种使用状态下均不会出现辐射超标现象。SAE J551-5——2012将“变化车辆工况”列为第5.4.4款,指出动态车辆状况的测试方法还在研究中。
2 电动汽车动态工况EMI测试技术需求分析与设计
为实现电动汽车动态工况EMI测试,需分步实现动态工况下的特征频率提取、最大发射值测量,这将会对底盘测功机、频谱分析仪、扫描接收机等仪器设备的信息化程度提出更高的要求。
2.1 动态工况下车辆信息获取
为了实现动态工况的EMI测量,应采集用以描述车辆工作状况的参数[7-8],如车速νV、负载扭矩TV、制动力FS。需从车辆或底盘测功机,采用直接测量与间接测量的方法得到各种参数。
通过直接测量可在车辆对应位置获得车速νV、负载扭矩TV、制动力FS。车速νV可以由车载诊断系统(the second on-board diagnostics,OBD II)中获取,由OBD II系统提供的数据更新率约为10Hz。车辆负载扭矩TV可采用局部应力应变测量、车辆外部载荷测量两种方案;局部应力应变测量方案直接在零部件的高应力应变点布置应变片,测量准确度高,但应变片粘贴位置受车辆型号影响[9];车辆外部载荷测量方案,一般采用车轮力传感器测量作用于车轮轴头的6个分力,经合成得到车辆外部载荷[10]。制动压力FS则是在垂直力为0 N时的特殊情况,其传感物理量与车辆负载扭矩TV相同。
实时获取多车轮多参数的运动状态信息,集成运动状态实时监测系统,即可实现不同行驶状况下车轮运动状态监测[11]。但直接测量方案需要针对车辆特性布置传感器,在实际测试中的可行性较差。
间接测量方案在底盘测功机可获得的物理量基础上[12],计算得车辆各参数。图1为底盘测功机与车辆主动轮的受力分析图。
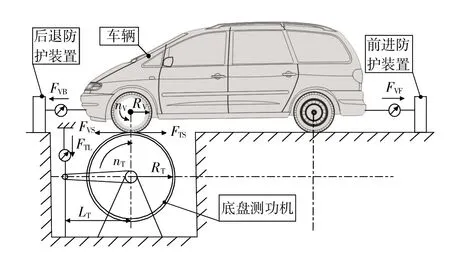
图1 底盘测功机与车辆主动轮受力分析图
若车轮与转鼓间无相对滑动,底盘测功机转鼓转速nT、半径RT、固定位置拉力FTL、与车轮接触面阻力FTS,前进、后退防护装置拉力分别为FVF、FVB,车辆轮胎半径RV、主动轴直径DVF;车速νV、负载扭矩TV、制动力FS分别为

2.2 动态工况下特征频率提取
在特征频率提取阶段,可以采用扫频式频谱分析仪、实时频谱分析仪。
按标准CISPR 16-1-1——2010规定,采用准峰值检波器测试频段 B(150 kHz~30 MHz,RBW=9 kHz)[13],扫频式频谱分析仪至少需要耗时63.3s,而实时频谱分析仪仅需1.0s。因此选用实时频谱分析仪实现动态工况特征频率提取。
实时频谱分析仪利用有限长数据经离散傅里叶变换(discrete fourier transform,DFT),计算其频域特性。设信号X(t)的无限长离散序列为X(∞)={x(n)}(n∈Z)、N点序列为X(N)={x(n)}(0≤n<N),则X(N)为

则其DFT[14]为
实际应用中若采用快速傅里叶变换(fast fourier transform,FFT)进行计算,由式(5)可知,变换两端(时域和频域上)的序列为有限长,信号截断会产生能量泄漏。对有限长离散信号作DFT,会对其周期延拓变换,存在栅栏效应,可选择合适的窗函数抑制。不同窗函数对信号频谱影响不同,如矩形窗主瓣窄、旁瓣大,频率识别准确度最高、幅值识别准确度最低;布莱克曼窗主瓣宽、旁瓣小,频率识别准确度最低、幅值识别准确度最高。
在特征频率提取阶段,频率与幅值识别准确度都会影响到特征频率的提取,故需要针对电动车动态工况的信号设置窗函数,提高特征频率提取准确度。
设实时频谱分析仪的原理误差为u1、频率读数不确定度为u2,则仪器的合成不确定度uc为

降低实时频谱分析仪原理误差u1与频率读数不确定度u2,即可降低合成不确定度uc。
设仪器游标频率fc、频率精准不确定度u2_1、扫描带宽特性ascan、分析带宽特性arbw、扫描带宽fscan、分析带宽frbw、扫描点数N,则频率读数不确定度u2为

其中,fc、u2_1、ascan、arbw、frbw由仪器特性决定, 对于同一台仪器,其值不变;fscan由测试标准决定,对于同一项目测试,其值不变。因此,只能通过提高扫描点数N或设计最优的窗函数,才能降低仪器的合成不确定度uc,提高特征频率提取准确度。
2.3 动态工况下发射值测量
发射值测量采用接收机的固定频率模式,在提取到的特征频率fCi(i=1,2,3,…)下,测量得电磁场发射值ECi随扫查时间tR的变化关系,并与规定的限值比较得出结论。在动态工况下,汽车工况随测试开始后的时间tT变化,应将tT与tR对应起来。时间对应可以采用协同作业或读写时间戳2种方案。

若底盘测功机、EMI测试接收机的延时特性分别为tTC、tRC,则对于相等的相对时间戳t(i)T、t(j)R,系统误差ΔtC为

系统误差ΔtC可以利用软件控制仪器多次测得平均值进行补偿。此外,采用采样频率与数据点数计算相对时间的方法,存在累积误差。
2)读写时间戳法在上位机获取发出开始指令、收到数据的时间,则对于数据中各个采样点的时间,可以采用插值方法(如牛顿-莱布尼茨插值等)计算。图2为基于读写时间戳的同步方案机理图。

图2 基于读写时间戳的同步方案
设上位机发出开始指令的时间Ts、仪器开始采集数据的时间TAs、仪器结束采集数据的时间TAe、上位机接收到数据的时间Te,则数据时间戳的原理误差uT为

可见,该方案没有累积误差;若仪器为频谱分析仪,其检波时间TD=TAe-TAs,则可计算得uT,再对插值方法进行补偿,即可抑制原理误差。
另外,若能测得上位机与仪器的通信延迟、仪器与上位机的数据传输时间,再对插值方法进行补偿,可更加有效地抑制原理误差。
3 结束语
1)分析当前国际汽车整车EMI测试标准化工作,指出研究动态车辆状况的EMI测试方法是未来趋势且具有一定意义,并分析其对车辆信息获取、电磁干扰值测试的技术需求。
2)明确动态工况应获取的车辆信息为车速νV、负载扭矩TV、制动力FS,设计通过实时获取多参数运动状态信息的直接测量方案与根据底盘测功机获得物理量计算车辆各参数的间接测量方案。
3)动态工况下电磁干扰值测试,选用实时频谱分析仪实现特征频率提取,需研究专用窗函数,提高特征频率提取准确度;最大发射值测量可采用接收机的固定频率模式。针对协同作业法对应EMI测量值与车辆工况数据存在累积误差的问题,提出无累积误差的读写时间戳法。
[1]GUTTOWSKI S, WEBER S, HOENE E, et al.EMC issues in cars with electric drives[C]∥2003 IEEE Symposium on Electromagnetic Compatibility,2003.
[2]余绍峰,何金良,张波,等.燃料电池客车驱动系统传导骚扰源的统计分析[J].高电压技术,2007,33(10):45-48.
[3]RUDDLE A R,ARMSTRONG R.Review of current EMC standards in relation to vehicles with electric powertrains[C]∥2013 International Symposium on Electromagnetic Compatibility,2013.
[4]IGLESIAS M, ECHEVERRIA I, ARTECHE F, et al.EMC mapping of a power train for fully electric 4-wheel drive vehicle[C]∥2014 International Symposium on Electromagnetic Compatibility,2014.
[5]曾博,邓俊泳,林道祺,等.电动汽车低于30 MHz频段EMI测试标准分析[J].中国测试,2016,42(9):11-14.
[6]Performance levels and methods of measurement of magnetic and electric field strength from electric vehicles,150 kHz to 30MHz:SAE J551-5-2012[S].2012.
[7]汪玲燕,程耕国,鲍考明,等.OBD物联网控制系统的研究与开发[J].自动化仪表,2015,36(5):52-56.
[8]黄瑞龙,刘桂雄,黄坚,等.基于扫频调谐预扫描的快速EMI测试关键技术研究[J].电子测量与仪器学报,2016,30(8):1269-1274.
[9]王霄锋,徐文,黄元毅,等.车辆道路行驶载荷测量方法研究[J].机械强度,2012(5):666-671.
[10]李世武,姚雪萍,孙文财,等.体现悬架特性的车辆载荷状态监测技术[J].吉林大学学报(工学版),2014,44(2):335-342.
[11]张健伟,刘桂雄,潘梦鹞.基于智能传感的车轮运动状态监测系统设计[J].科学技术与工程,2011(18):4268-4272.
[12]温溢,田野,王建海,等.耐久底盘测功机随使用时间的内阻特性研究[J].中国测试,2013,39(4):121-124.
[13]Specification for radio disturbance and immunity measuring apparatus and methods——Part 1-1:Radio disturbance and immunity measuring apparatus——Measuring apparatus:CISPR 16-1-1:2010[S].2010.
[14]ARIF M.A novel approach for DFT computation[C]∥2015 International Conference on Circuits,Power and Computing Technologies(ICCPCT),2015.
(编辑:商丹丹)
Technology requirement and scheme design for electric vehicle EMI measurements in transient condition
ZENG Bo, DENG Junyong, LIN Daoqi, LIN Qing, LIU Guorong
(China National Electric Apparatus Research Institute Co.,Ltd.,Guangzhou 510275,China)
Forhighly integrated electric drive system of electric vehicle could lead to the electromagnetic compatibility problem, the vehicle conditionspreceptsof currentinternational electric vehicle electromagnetic interference (EMI) measurements standard were discussed.It was necessary to study the transient condition of the vehicle design and test method.On this purpose,direct and indirect real-time measurement methods for transient vehicle conditions information were put forward, and the vehicle speed, load torque and braking force were acquired in real time.EMI measurements method for transient vehicle conditions was also proposed,which characteristic frequency was test by real-time spectrum analyzer and emission was measured by receiver.In order to matching transient vehicle conditions information and EMI measurement data,a read/write timestamp method was present.The discussion shows that integration scheme can realize electric vehicle EMI measurements in transient condition.There is no accumulated error from the read/write timestamp matching method.
electric vehicle; transientcondition; characteristic frequency extraction; emission measurement
A
1674-5124(2017)11-0008-04
10.11857/j.issn.1674-5124.2017.11.002
2017-02-11;
2017-03-24
广州市科技计划项目(201504010037)
曾 博(1981-),男,湖北公安县人,工程师,硕士,主要从事电磁兼容检测技术研究。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
流程工业(2022年3期)2022-06-23
空间科学学报(2021年6期)2021-03-09
振动工程学报(2020年1期)2020-05-21
科技创新与应用(2020年4期)2020-02-25
光学仪器(2019年3期)2019-02-21
湖北农业科学(2017年12期)2017-07-15
电子制作(2017年7期)2017-06-05
汽车维修与保养(2015年6期)2015-04-17
汽车维修与保养(2015年6期)2015-04-17
