
带弹性撑紧装置的弹链横向振动建模及虚拟样机仿真∗
2017-11-28 01:58伟赵
舰船电子工程 2017年10期
林 伟赵 洋
(1海军工程大学勤务学院 天津 300450)(2海军工程大学兵器工程系 武汉 430033)
带弹性撑紧装置的弹链横向振动建模及虚拟样机仿真∗
林 伟1赵 洋2
(1海军工程大学勤务学院 天津 300450)(2海军工程大学兵器工程系 武汉 430033)
论文基于多体动力学理论,根据某型弹仓内弹筒实际运动轨迹和结构特征,建立了带有弹性撑紧装置的旋转弹链横向振动动力学模型,并在该模型的基础上设计虚拟样机进行仿真计算。对不同约束条件下的弹筒横向振动情况进行分析表明,弹性撑紧装置对降低旋转弹链横向振动有重要作用。
旋转弹仓;转动惯量;链传动系统;振动;仿真
1 引言
链式自动化弹仓是某大口径火箭弹自动化装填系统的重要组成部分,在控制系统的作用下,由链轮驱动链条带动弹筒到达指定位置。然而,由于该弹仓传动距离较长、载重较大、步进马达的角加速度较大等因素影响,弹筒在运动时会产生较大的横向振动。尤其当弹链产生共振时,横向振动对弹仓运转的稳定性有极大的影响。
2 动力学建模
图1表示某型装备的自动化弹仓的弹位分布图。该装置采用链式传动机构,由液压马达驱动。弹筒与弹筒之间相互串联成链,由销轴固定在传动链条之上,链条在链轮的驱动下,沿链条导轨运动。1#链轮为主动组合链轮,其余为从动组合链轮。
为研究该弹链横向振动,建立如图2所示的动力学模型。模型中设计约束装置为一个可以横向运动的导轨,导轨的外侧连接有带阻尼的弹簧,内侧则与多个弹筒接触。弹筒与导轨间的接触视为连续的弹性接触,并考虑接触阻尼的影响。
3 动力学方程建立
如图3所示,将每个弹筒看成一个独立的链节,假设弹筒i的重心位于其几何中心,则弹筒i质心偏离平衡位置的横向位移可以表示为
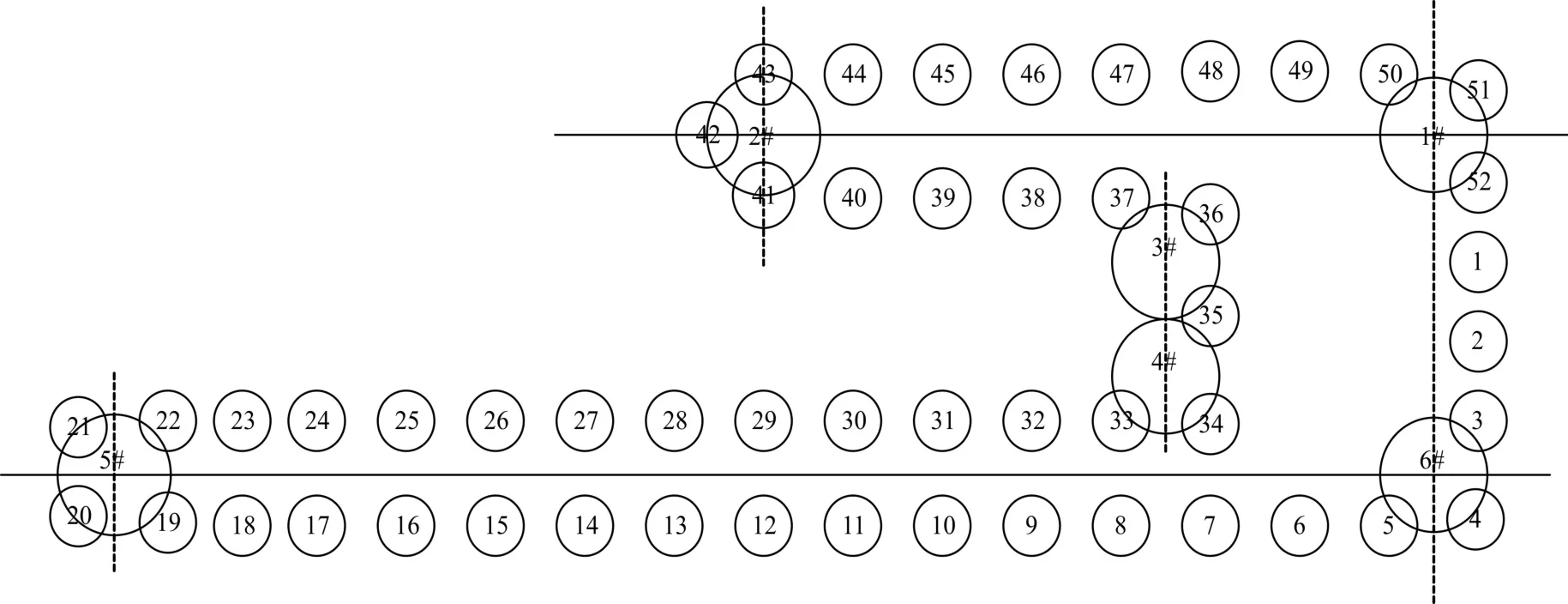
图1 弹仓弹位分布
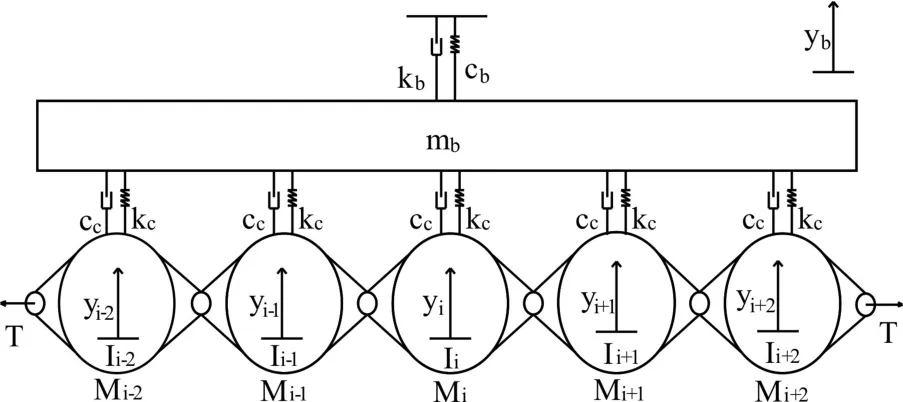
图2 带撑紧装置的弹链模型
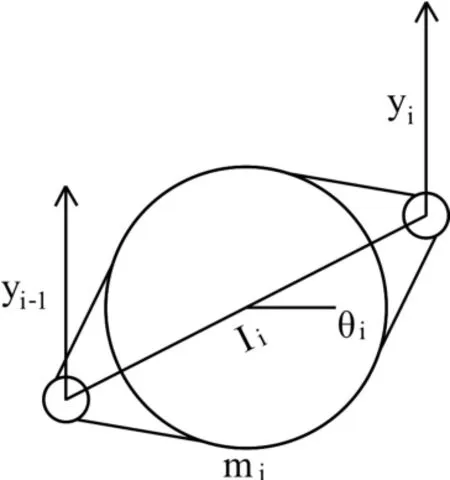
图3 弹筒运动模型
弹筒i的质心在y方向上的速度为
式中,yi和yi-1分别为弹筒两端铰链的横向位移。
当链节绕其几何中心的转角很小时(sinθi≈θi),弹筒i的转角可以用其两端铰链横向位移表示为
弹筒i绕其几何中心的旋转速度为
式中,h为弹筒两端铰链间的距离。
弹筒的转动惯量可以表示为
式中,r为弹筒半径(忽略铰链绕中心轴的转动惯量)。
含有弹性撑紧装置和N个弹筒的弹链总动能为
式中,mb为撑紧导轨的质量,y˙b为撑紧导轨的横向运动速度。
系统的总势能可表示为

式中,M为第一个与导轨接触的弹筒编号;Z为与导轨接触的弹筒总数;T为弹筒铰链所受张力;kc为弹筒与导轨间的接触刚度;kb为导轨撑紧弹簧刚度。
由阻尼器所消耗的能量为

式中,c为弹筒铰链间粘性阻尼;cc为弹筒与导轨间接触阻尼;cb为导轨撑紧弹簧阻尼。由上式,建立广义系统的拉格朗日方程,得

式中,qi为广义坐标;q˙i为广义速度;Qi为广义力。
将系统动能与势能的表达式分别对广义坐标求导,可推导建立动力学微分方程

其中

在弹链运转程中,由链轮的多边形效应引起激励,一般简化为简谐激励,作用于链条两边。其表达式为

式中,A*为激励幅值,ωn为激励频率。则系统所受广义力为

4 虚拟样机仿真分析
依据上文所分析的动力学模型,运用solidworks软件建立该弹链的虚拟样机模型,并对弹链进行动力学仿真实验研究。选取16号弹筒为研究对象,弹筒质量75kg,半径125mm,铰链间距310mm,导轨质量20kg,各阻尼系数0.1,主动轮步进规律如图4所示。
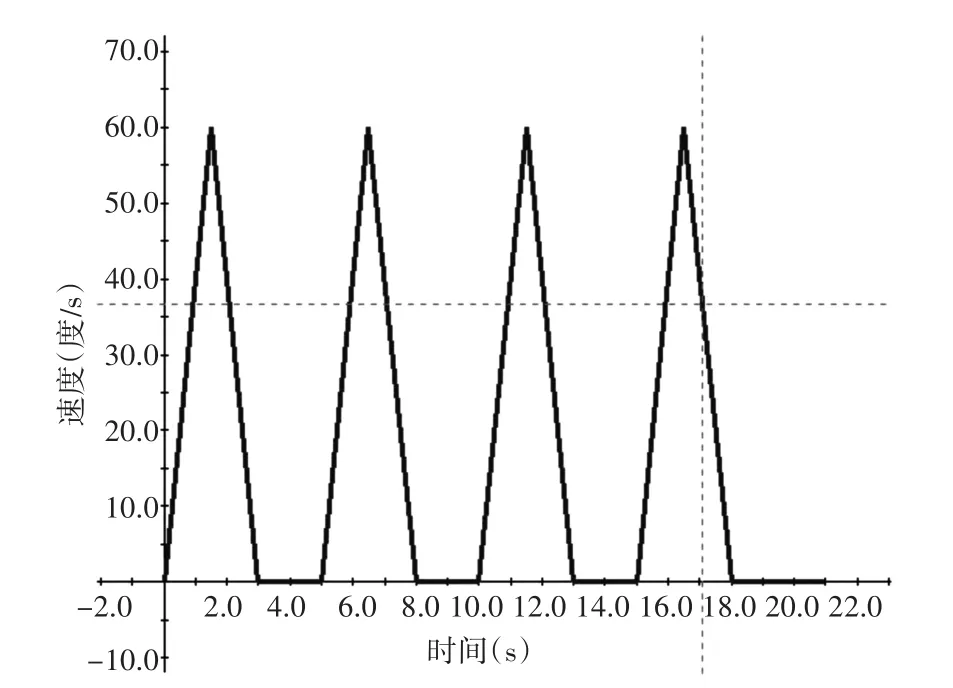
图4 马达步进规律
弹筒横向加速度随导轨撑紧弹簧刚度变化规律如图5~图9所示。
5 结语
以上仿真结果表明,在刚性导轨约束下的弹筒振动最大,随着导轨撑紧弹簧刚度的减小,弹筒的横向振动逐渐减小。当导轨撑紧弹簧刚度继续减小时,弹筒不能得到有效横向约束,会发生较大的波动。综上所述,撑紧导轨能够有效抑制弹链的横向振动,根据该弹仓实际结构特征,设计恰当的撑紧导轨,对于降低整个系统的振动噪声、提高定位卡锁精度是非常有效的。

图5 刚性导轨
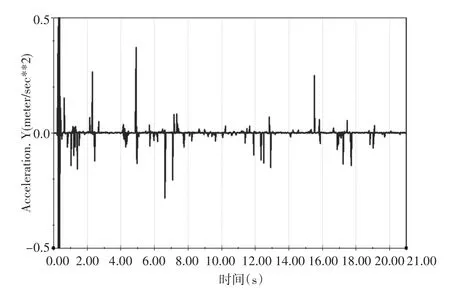
图6 导轨撑紧弹簧刚度为30000N∕m

图7 导轨撑紧弹簧刚度为10000N∕m

图8 导轨撑紧弹簧刚度为5000N∕m
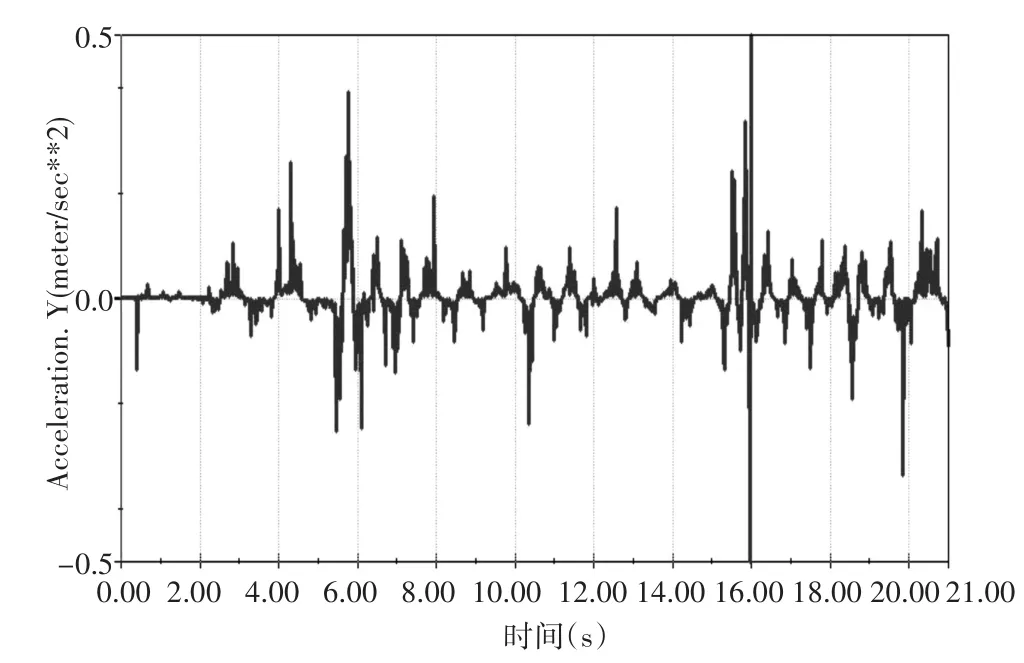
图9 导轨撑紧弹簧刚度为500N∕m
[1]覃维献.滚子链传动横向振动稳定性分析[J].机械传动,2010,34(8):79-82.
[2]侯保林.重载高速进料机械臂的有限元运动弹性静力分析[J].机械科学与技术,2001,20(5),716-720.
[3]毛君,师建国,张东升.重型刮板输送机动力建模与仿真. 煤炭学报,2008,33(1):103-106.
[4]郑志峰,王以行,柴帮衡.链传动[M].北京:机械工业出版社,1984:5-7.
[5]胡胜海,郭彬,邓坤秀,等.含非线性接触碰撞的大口径舰炮弹链柔性铰多体模型[J].哈尔滨工程大学学报,2011,32(9):1217-1222.
[6]李德胜.自动装弹系统的运动实现与传动性能研究[D].天津:天津理工大学,2009.
[7]王慧莹.步进传动链机械系统的动力学分析与应用研究[D].天津:天津大学,2007.
[8]Turner A J,Ramsay K,Clark R E,et al.Development of high force electromechanical linear actuator for shift-by-wire automated manual transmissions[C]∕SAE Paper 2006-01-0360,Detroit,USA,2006.
[9]Tseng C,Hsieh M.Analysis and optimization of clutch actuator on automated manual transmission system[C]∕∕SAE paper 2005-01-1782,Detroit,USA,2005.
[10]Nosper T.Reduction of shift time of automated gearboxes with engine and transmission brakes[C]∕FISITA 2006,Yokohama,Japan,2006.
Transverse Vibration Simulation of the Chain with Elastic Supporting Device and the Virtual Prototype Simulation
LIN Wei1ZHAO Yang2
(1.College of Logistical,Naval University of Engineering,Tianjin 300450)
(2.Department of Weaponry Engineering,Naval University of Engineering,Wuhan 430033)
Based on actual moving tracking and structural characteristics of bomb of a certain type magazine,the paper used multi-body dynamics theory to build a dynamic model of transverse vibration of mechanized eddy magazine with elastic tension device.And design virtual prototype to do simulation calculation.The transverse vibration analysis under different restrained conditions showed that the elastic tension device plays an important role to reduce transverse vibration of mechanized eddy magazine.
mechanized eddy magazine,moment of inertia,chain transmission system,vibration,simulation
TJ303.3
10.3969∕j.issn.1672-9730.2017.10.015
Class Number TJ303.3
2017年4月9日,
2017年5月28日
林伟,男,博士,讲师,研究方向:舰载武器系统。赵洋,男,博士研究生,研究方向:武器系统运用与保障工程。
猜你喜欢
煤(2022年6期)2022-06-13
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
科技与创新(2020年15期)2020-08-12
轻兵器(2019年8期)2019-08-30
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车维修技师(2018年8期)2019-01-15
汽车零部件(2018年11期)2018-12-08
汽车电器(2018年10期)2018-11-01
