多智能体系统故障诊断仿真实验开发
2017-11-27 06:43:52夏静萍
实验技术与管理 2017年11期
张 柯, 夏静萍
(南京航空航天大学 自动化学院,江苏 南京 211106)
虚拟仿真技术探索与实践
多智能体系统故障诊断仿真实验开发
张 柯, 夏静萍
(南京航空航天大学 自动化学院,江苏 南京 211106)
利用Matlab开发了多智能体系统仿真实验,通过编写m文件求解故障诊断观测器增益矩阵,可以进一步加深对多智能体系统分布式故障诊断算法的理解。利用Simulink搭建的仿真实验,学生可以直观、清晰地学习故障诊断观测器在线故障诊断,并准确辨别出现故障的智能体以及完成准确故障诊断。将该开发的仿真实验应用到研究生课程教学中,取得了良好的教学效果。
多智能体系统; 故障诊断; 仿真实验; Matlab
故障诊断与容错控制是控制科学与工程中一个非常重要的研究方向,可以提升系统的可靠性和安全性,因而在军事和民用领域都具有重要的应用价值[1-3]。南京航空航天大学自动化学院从2013年开设了全英语授课的“控制系统故障诊断”研究生课程,使用国际出版社Springer出版的英文配套教材[4-7]。
多智能系统故障诊断是“控制系统故障诊断”课程中的一个难点,也是近些年国内外研究的热点[8-10]。多智能体系统是指由一系列具有局部感知能力、有独立处理能力以及有相互通信能力的个体组成的系统。系统中的个体能够通过与其他个体的通信,运用各自能力相互协作来完成共同的目标。传统针对单个系统故障诊断方法没有考虑多智能体系统的通信拓扑结构,难以直接应用到多智能体系统中,而多智能体系统自身具有通信链接、信息交互等特点。
在教学实践中,注意到由于该课程专业性较强,有的学生不能很好地理解知识点和控制系统设计方法。本文以直升机动态模型为例,利用Matlab软件开发了“控制系统故障诊断”课程的多智能体系统故障诊断仿真实验,以帮助学生理解和巩固关键知识点,提高学生的学习热情和专业教学效果。
1 多智能体系统故障诊断观测器设计及求解
1.1 多智能体系统描述
用G=(V,E,A)来描述具有N个节点的多智能体之间有向信息拓扑结构,其中:V={v1,v2,…,vN},E∈V×V分别表示有向图G的顶点集合和有向边集,A=[aij]∈RN×N表示邻接矩阵。定义(vj,vi)为从节点j到节点i的边,代表信息可以从节点j到节点i。aij代表边的权重,如果(vj,vi)∈E,则aij=1,否则aij=0。节点i的邻居表示为Ni={j|(vj,vi)∈E}。定义图G的Laplace矩阵为L=D-A,其中矩阵D=diag{di}∈RN×N的元素di=∑j∈Niaij。边(vi,vi)形成回路,自回路矩阵G=diag{gi}∈RN×N,矩阵G至少有一个对角元素不为零。
考虑如下具有N个节点的多智能体系统,第i个智能体系统如下:
i=1,2,…,N
(1)
其中:xi(t)∈n是状态向量,ui(t)∈m是控制输入向量,yi(t)∈p是输出向量,fi(t)∈r是系统元部件故障或执行机构故障,wi(t)∈d代表干扰和噪声,A、B、C、H、D1和D2是已知的适维矩阵。
1.2 故障诊断观测器设计
对第i节点设计如下故障诊断观测器:
(2)

(3)
定义如下增广向量和矩阵:
为了得到全局估计误差方程,定义如下全局向量:
可以得到全局误差方程:
(4)
其中:⊗表示Kronecter积。
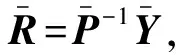
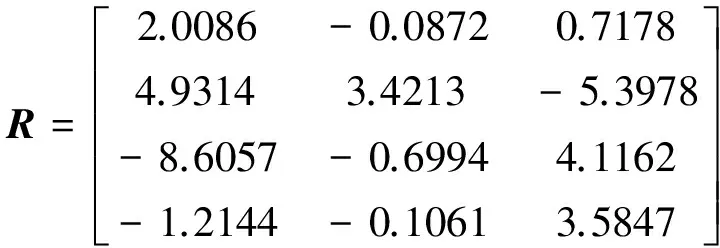
1.3 故障诊断观测器增益矩阵求解


(5)
(6)
其中:


2 仿真实验开发
基于Matlab仿真软件开发的仿真实验[11]主要包括2部分:(1)使用m文件编写程序,求解故障诊断观测器增益矩阵;(2)使用Simulink搭建仿真实验,用于直观展示多智能体系统故障诊断过程。
2.1 直升机模型的编队模型
实验中采用4架直升机进行编队协同飞行,它们的通信拓扑结构如图1所示。
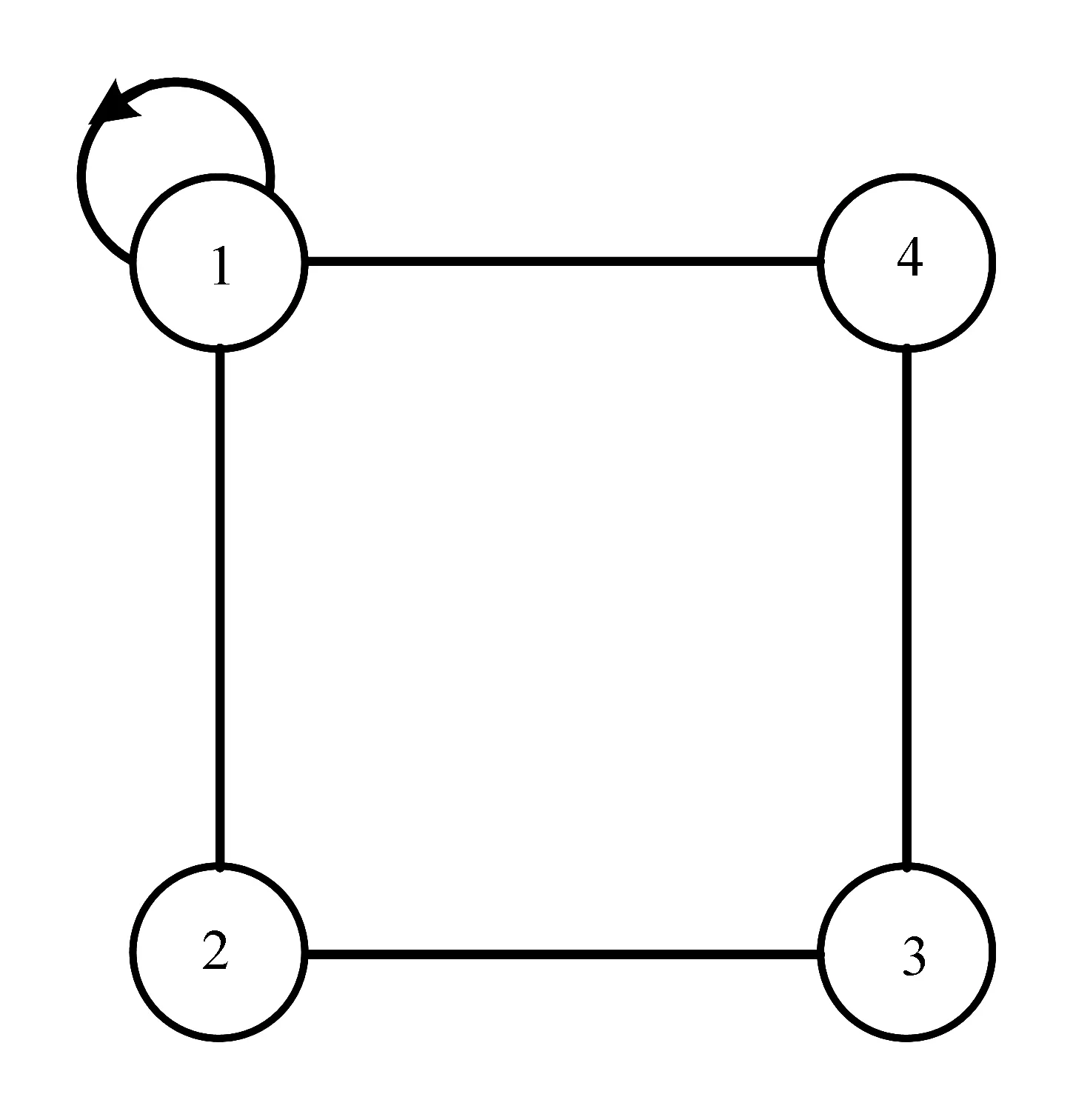
图1 通信拓扑结构
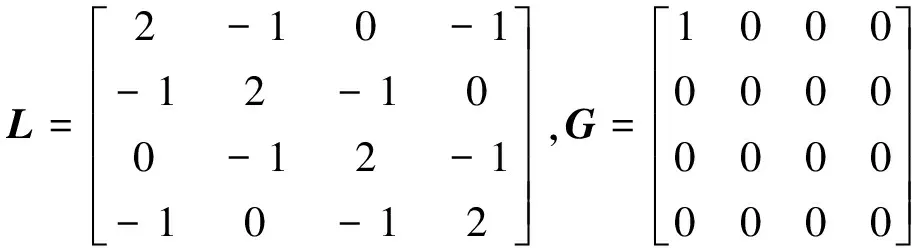
由图1可以得到Laplace矩阵L和自回路矩阵G如下:
实验使用如下的直升机飞行控制系统模型[12]:
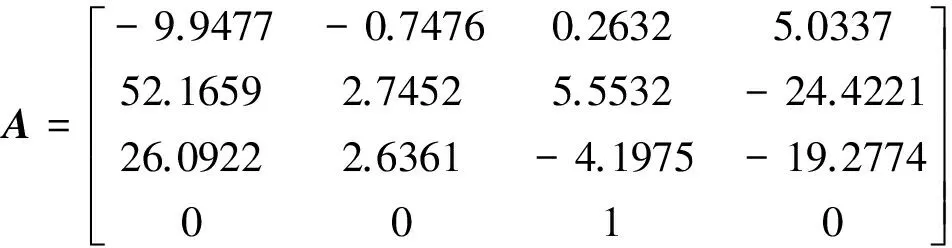
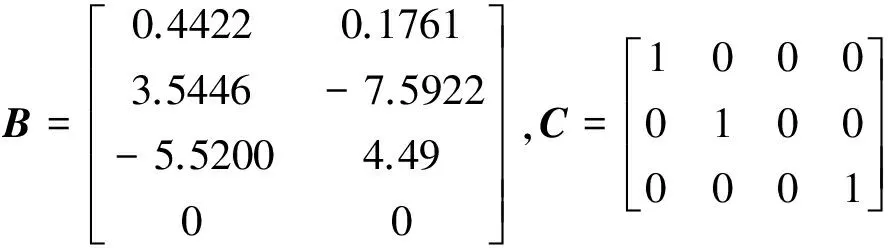
其中:状态向量为水平速度、垂直速度、俯仰角速度和俯仰角;控制输入为总距和纵向周期变距。实验中假设直升机出现了执行机构的故障,可得E=B,外界干扰输入矩阵分别为:
D1=[0.1 0.1 0.1 0.1]T
D2=[0.01 0.01 0.01]T
2.2 故障诊断观测器增益计算

2.3 Simulink仿真实验
在Simulink中搭建多直升机编队仿真图(见图2)。
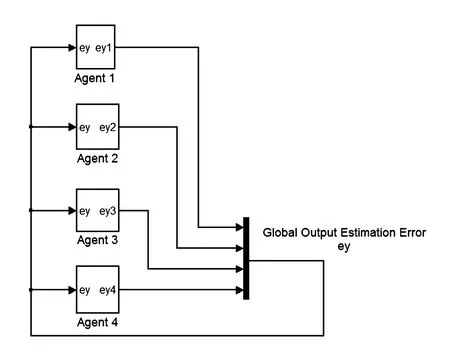
图2 多机编队仿真图
实验中,对每个智能体进行封装,每个智能体输出的是局部输出估计误差eyi(t) (i=1,…,4)。用Mux模块将每个智能体的输出形成全局输出估计误差向量ey(t),进而将ey(t)输入到每个智能体模块,根据给定的通信拓扑结构,形成分布式故障诊断观测器。
以智能体系统1为例,如图3所示。用S-function分别构建该智能体的系统模型和故障诊断观测器,即Aircraft 1和Observer 1,其中Observer 1基于Laplace矩阵L和自回路矩阵G搭建。Control Input和Disturbance Input模块分别模拟控制输入和外界扰动输入。Fault Injection用于模拟执行机构故障输入。在线故障估计值则基于Fault Estimation Module得到,用Scope模块显示故障估计曲线。以此类推,可构建智能体2—4的故障诊断模块。最后,将在线故障估计数据输出到Workspace,用subplot命令分别绘制多智能体故障估计曲线。
假设智能体系统2和智能体系统4分别在第20 s和第40 s出现执行机构偏差故障,可得到如图4所示的仿真实验结果。由图4可以看出,设计的故障诊断观测器可以准确诊断出发生的故障。
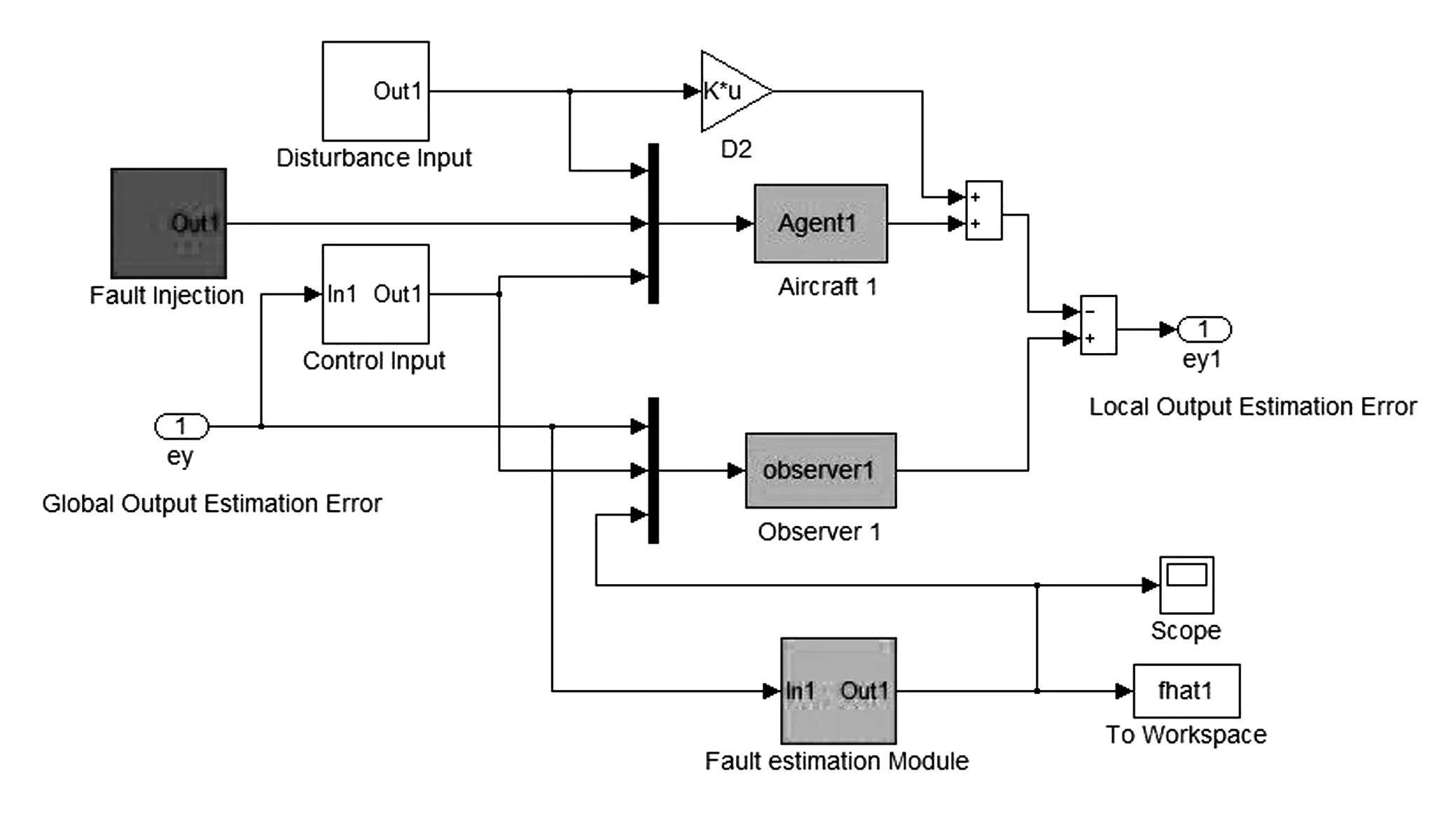
图3 第1个智能体故障诊断设计
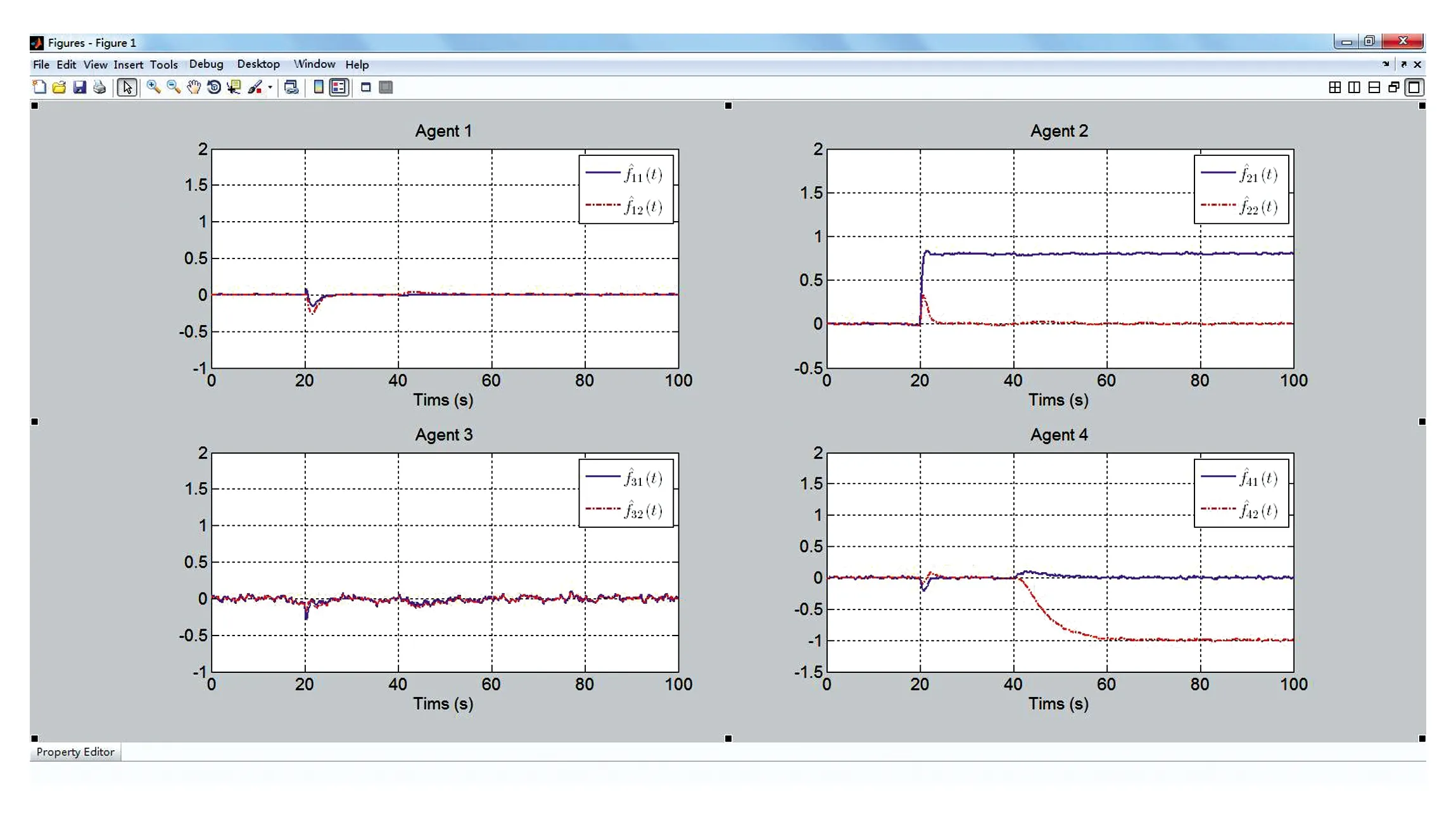
图4 实验仿真结果
3 结语
基于Matlab开发了多智能体系统故障诊断仿真实验。该仿真实验易于操作,主要用到了m文件、S-function和Simulink计算观测器增益矩阵并搭建仿真实验。通过计算观测器增益矩阵和在线实时仿真,有助于学生更加深入地理解故障诊断设计方法和具体过程,在整个教学过程中调动学生的积极性,从而取得更好的教学效果。
References)
[1] 周东华,胡艳艳.动态系统的故障诊断技术[J].自动化学报,2009,35(6):748-758.
[2] 姜斌,冒泽慧,杨浩,等.控制系统的故障诊断与故障调节[M].北京:国防工业出版社,2009.
[3] Blanke M, Kinnaert M, Lunze J, et al. Diagnosis andFault-TolerantControl[M].3rd ed. Berlin:Springer,2016.
[4] Zhang K, Jiang B, Shi P. Observer-Based Fault Estimation and Accommodation for Dynamic Systems[M].Heidelberg:Springer,2013.
[5] 夏品奇,江驹,王严.创新理念立足本土面向世界:南京航空航天大学研究生教育国际化探索[J].学位与研究生教育,2013(10):53-57.
[6] 刘丽霞,刘惠琴.加强国际化培养提高研究生教育质量[J].学位与研究生教育,2010(12):21-24.
[7] 徐巍华.工学研究生课程的全英文教学实践[J].电气电子教学学报,2013,35(2):1-2,32.
[8] Ren W, Cao Y. Distributed Coordination of Multi-Agent Networks[M].London:Springer,2011.
[9] Lewis F L, Zhang H, Hengster-Movric K, et al. Cooperative Control of Multi-Agent Systems: Optimal and Adaptive Design Approaches[M].London:Springer,2014.
[10] 杨静.教研结合 培养研究生的创新能力[J].实验技术与管理,2016,33(3):26-29.
[11] 马玉真,宋方臻,邵海燕.建模仿真实例教学在研究生创新教育中的应用[J].实验技术与管理,2012,29(6):86-89.
[12] Zhang Y M, Jiang J. Integrated active fault-tolerant control using IMM approach[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(4):1221-1235.
Development of simulation experiment on fault diagnosis of multi-agent systems
Zhang Ke, Xia Jingping
(College of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)
The simulation experiment of multi-agent systems is developed by using Matlab, and the gain matrix of the fault diagnosis observer can be calculated by writing m files, which can further deepen the understanding of distributed fault diagnosis algorithm of multi-agent systems. Based on the simulation experiment established by Simulink, the students can visually and clearly understand how the fault diagnosis observer implements the online fault diagnosis, accurately identifies the failed agents and performs accurate fault diagnosis. The simulation experiment is applied to the graduate course teaching and the good teaching effect is achieved.
multi-agent systems; fault diagnosis, simulation experiment; Matlab
10.16791/j.cnki.sjg.2017.11.027
TP277;TP391.9
A
1002-4956(2017)11-0114-04
2017-04-11
国家自然科学基金项目(61673207);江苏省高等教育教改项目(2015JSJG176);南京航空航天大学留学研究生英文授课课程建设项目;江苏高校“青蓝工程”
张柯(1981—),男,河北邯郸,博士后,副教授,主要研究方向为多智能体系统故障诊断与容错控制.
E-mailkezhang@nuaa.edu.cn
猜你喜欢
中国机械工程(2022年21期)2022-11-21 11:57:48
中国机械工程(2022年7期)2022-04-20 03:24:20
中国机械工程(2021年23期)2021-12-15 13:31:00
数据采集与处理(2021年4期)2021-09-20 10:26:56
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
振动、测试与诊断(2014年5期)2014-03-01 01:14:21