风力机模拟器的阻尼补偿策略与实验验证
2017-11-24 09:04:08徐洋超殷明慧陈载宇刘建坤汪成根
电力工程技术 2017年6期
徐洋超, 殷明慧, 陈载宇,李 赟, 刘建坤, 汪成根
(1. 南京理工大学自动化学院,江苏 南京 210094;2. 国网江苏省电力公司电力科学研究院,江苏 南京 211103)
风力机模拟器的阻尼补偿策略与实验验证
徐洋超1, 殷明慧1, 陈载宇1,李 赟1, 刘建坤2, 汪成根2
(1. 南京理工大学自动化学院,江苏 南京 210094;2. 国网江苏省电力公司电力科学研究院,江苏 南京 211103)
风力机模拟器作为模拟实际风力机的重要工具,可以简化风电研究的实验过程、缩短研发周期。由于模拟器的转动惯量远小于实际风力机,现有研究主要关注于应用转动惯量补偿算法的模拟器的稳定性问题。文中发现忽略阻尼或阻尼补偿不准确会严重影响模拟的准确性,导致转速偏低以至无法准确模拟实际风力机的机械动态过程,并完善了风力机模拟器的传动链模型,分析了风力机模拟器与实际风机传动链的阻尼差异对动态模拟准确性的影响机理,并设计了风力机模拟器的阻尼补偿策略。基于最大功率点跟踪控制实验验证了阻尼补偿策略,结果表明改进后的风力机模拟器能够更加准确地复现风力机的机械动态过程。
风力机模拟器; 阻尼补偿; 机械动态模拟; 转动惯量补偿
0 引言
风力机模拟器(wind turbine simulator,WTS)作为实际风力机(wind turbine,WT)的实验替代设备,可以在实验室环境下模拟风力机特性,方便研发机构对风力机控制策略、变流并网策略以及风电系统及部件的开发测试和故障分析等内容进行研究。
针对不同的研究目标和设计模型,目前的WTS主要分为以下三类:第一类WTS主要关注于风力机的电磁部分与并网的变流器部分,着重研究风力机电气环节与并网接入问题[1];第二类WTS关注的重点在于故障模拟和状态监测[2,3];第三类WTS主要是为了进行风力机伺服控制实验的设计与验证,目的是检验在不同湍流风速下设计的主控算法是否达到预期效果,如典型的MPPT控制实验。本文的研究主要关注第三类WTS[4-11]。
WTS的转动惯量远远小于实际的风力机,需要对其转动惯量进行补偿。比例缩放和惯量补偿策略可以使WTS通过算法补偿的方式以较小的转动惯量模拟不同类型风电机组的风力机机械动态[4],由此造成的失稳问题目前已得到较好的解决[12-14,20],文献[20]中风力机模拟器已成功模拟了转动惯量为实际平台450倍以上的风机。
WTS风力机机械动态模拟的过程中往往忽视阻尼的影响,使得WTS实验过程中的转速偏低,无法准确模拟真实风力机的机械动态过程,降低了实验结果的可信度,影响了风力机控制策略的实验验证。
本文改进了WTS传动链的数学模型,分析了阻尼对风力机及其模拟器机械动态的影响机理,发现忽略阻尼或阻尼补偿不准确会导致WTS在模拟风力机驱动转矩时出现误差,进而影响WTS机械动态模拟的准确性。在此基础上设计了基于阻尼补偿的改进策略,用于提高WTS模拟的准确性。通过最大功率点跟踪控制实验验证了改进后的WTS能更准确地模拟风力机的机械动态过程。
1 风力机模拟器的数学模型
1.1 风力机模拟器的结构
如图1所示,WTS主要由以下3个部分构成。
(1) 由发电机和“交-直-交”全功率变流器组成的发电并网子系统。该部分具有与实际风电系统一致的电气结构,用于还原风电的并网过程。
(2) 实时数字模拟系统。实时数字模拟系统具有生成风速、模拟风力机气动输出以及实现风力机运行控制等作用,其构建于可编程逻辑控制器(programmable logic controller, PLC)上,用于完成风轮气动仿真、机械动态模拟以及风力机主控策略等功能。
(3) 由变频器、电动机和机械飞轮组成的风轮模拟器。变频器根据实时数字模拟系统计算的转矩参考值对电动机进行转矩控制,模拟风轮的驱动转矩,其中机械飞轮用于补偿部分转动惯量。
风轮获得的气动转矩可表示如下:
Ta=0.5ρπR2v3Cp()/ωt
(1)
=ωtR/v
(2)
式中:ρ为空气密度;R为风轮半径;v为风速;ωt为风轮角速度;Cp为风能利用系数,与叶尖速比相关。

图1 风力机模拟器与实际发电系统的对比Fig.1 Comparison of the WTS and WT
1.2 风力机模拟器数学模型及转动惯量补偿策略
实际风力机的机械动态在忽略阻尼影响的情况下,可以表示为:
(3)
式中:Jt为整个传动链等效到高速侧的转动惯量;ng为齿轮箱变比;ωg和Tg分别为发电机的转速和电磁转矩。而WTS忽略阻尼后,其传动链的机械动态可以表示为:
(4)
式中:Ts为WTS模拟风轮的驱动转矩;Js为WTS整个传动链的转动惯量;ωs为WTS传动链转速;Tgs为WTS发电机的电磁转矩。
采用比例缩放策略将实际风力机进行容量缩放,即将式(3)等号两边同时缩小ns倍,得到:

(5)
实际风力机比例缩小后,为使WTS具有相同的机械动态,只要令两者转速相同,即ωs=ωg。同时令两者执行的发电机电磁转矩具有相同效果,即Tg/ns=Tgs。由式(4)和式(5)可得:
(6)
式(6)表示WTS模拟与实际风轮机械动态时电动机需要输出的转矩,等号右边的第一部分表示容量缩放后实际风力机的气动转矩;第二部分表示为模拟大转动惯量时进行的动态转矩补偿。
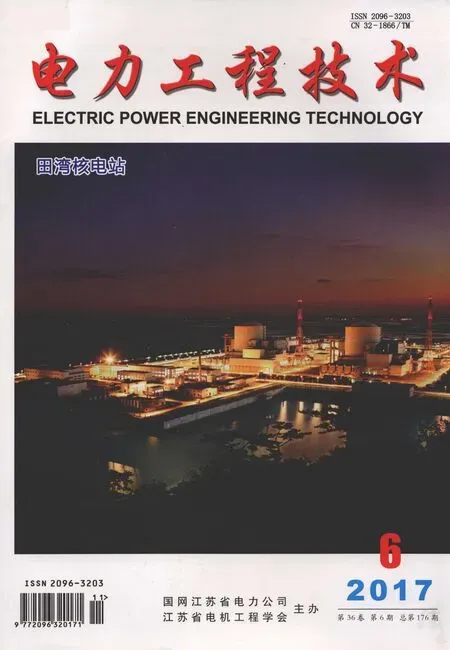
WTS的结构如图2所示,若Ts可以按照式(6)进行转矩输出,则WTS理论上具有和WT一致的传动轴转速,即相同的机械动态。
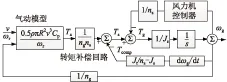
图2 风力机模拟器原理Fig.2 WTSschematic
2 阻尼补偿对风力机机械动态模拟的影响分析
通过分析WTS和WT的传动链模型发现:忽略阻尼补偿的WTS与实际风机在传动链上存在一个被放大的偏差转矩。偏差转矩的存在会改变被模拟风机的稳态及动态运行特性,进而影响风机动态模拟的准确性。
2.1 阻尼补偿不准确产生的偏差转矩
为分析阻尼对WTS模拟的影响,本文完善了WTS和WT的传动链模型。在考虑阻尼影响的情况下,等比例缩放后实际风力机的传动链模型为:
(7)
其中Kt为风力机传动链(等效到高速侧)的阻尼系数,而WTS传动链的数学模型为:
(8)
其中Ks为模拟器传动链的阻尼系数,将式(7)、(8)相减后得到:
(9)
式(9)表示WTS模拟风轮时在考虑阻尼补偿下电动机需要输出的转矩,等号右边的第三部分即阻尼补偿分量。考虑阻尼的WTS结构如图3所示。
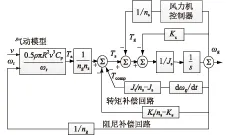
图3 考虑阻尼补偿的风力机模拟器原理Fig.3 WTS schematic with damping compensation
将式(9)两边同时乘以ns,则传动链补偿模型可改写为:

(10)
而忽略阻尼时传动链补偿模型为:
(11)
通过对比式(10)和式(11)可以发现,两者存在一个偏差转矩:
ΔTn=(Kt-nsKs)ωg
(12)
通常情况下Kt和Ks数值较小,因此在理论分析过程中常被忽略。但如式(12)所示,经比例缩放后WTS本身的阻尼特性被放大了ns倍,因此一旦ns数值较大,便会导致模拟器驱动转矩的偏差过大,无法准确模拟真实风力机的机械动态。
2.2 偏差转矩对稳态运行的平衡点位置的影响
风力机在任一恒定风速下均会存在一个平衡点,该平衡点处风力机的气动转矩与发电机的电磁转矩相等。
在分析偏差转矩对风力机稳态运行平衡点的影响时,考虑到风力机气动模型比较复杂,本文采取基于(美国)国家可再生能源实验室(national renewable energy laboratory,NREL)CART3风力机[15]模型的数值仿真分析偏差转矩对平衡点的影响,MPPT控制算法采用最优转矩控制,CART3的机型参数以及仿真设置如表1所示,其发电机采用的永磁发电机。
表1 仿真参数以及机型参数Table 1 Simulation parameters and turbine parameters

参数描述参数值桨距角/(°)0恒定风速/(m·s-1)6控制策略最优转矩法最优转矩增益/[N·m·(r·min-1)-2]0.002额定功率/kW600额定转速/(r·min-1)1780切入风速/(m·s-1)4风轮半径/m20风机转动惯量/(kg·m2)613301齿轮箱传动比43.165空气密度/(kg·m-3)1.225
如图4所示,Ta,Tg表示CART3风力机在v=6 m/s的恒定风速下,风轮气动转矩和发电机电磁转矩的理论值;Ta1,Ta2,Ta3分别是在ns=1,ns=50,ns=100且未进行阻尼补偿时,风力机模拟器模拟的驱动转矩随转速变化的关系。从图中的仿真结果可以看出当ns=1时,Ta和Ta1基本重合,忽略阻尼对转速的影响不大,但是随着ns的逐渐增大,平衡点的偏差会越来越大。

图4 模拟器在不同ns条件下的稳态运行点Fig.4 Steady operation points of the simulator under different ns
2.3 偏差转矩对动态运行的转速影响
在相同的湍流风速条件下对未进行阻尼补偿的WTS进行MPPT仿真,结果如图5所示。
图5 未进行阻尼补偿的WTS发电机转速Fig.5 Generator speed of WTS without damping compensation
从图中可以明显发现:当ns=1时,风力机模拟器的转速轨迹基本与理论值重合,但随着ns的逐渐增大,风力机模拟器的转速轨迹逐渐偏离理论值,当ns=500时转速轨迹已经明显低于理论值。
3 考虑温度与转速影响的阻尼补偿方法
由第2节分析可知,忽略阻尼或者阻尼补偿不准确都会影响WTS模拟的准确性。因此有必要通过准确的阻尼补偿来提高风力机机械动态模拟的准确性。
3.1 风力机模拟器传动链的阻尼特性
对于实际风力机的传动链阻尼,一般可以通过厂商提供的用户手册查询。而实验室内构建的WTS无法直接获知其传动链特性。为进行准确的阻尼补偿,首先需要测量风力机模拟器本身的阻尼特性。
通过实验可以发现:模拟器传动链的阻尼与其转速和温度相关,因此在保持温度(这里的温度指热稳定后,轴系表面的温度)基本不变的情况下,永磁电机侧输出某一恒定转矩,当转速保持平衡时,这一施加的恒定转矩即为该温度和转速下WTS的阻尼等效转矩。采用该方法获得了如图6所示的WTS传动链的阻尼特性曲线。
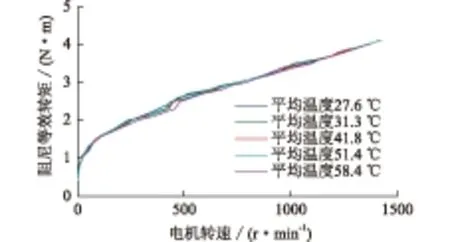
图6 风力机模拟器传动链阻尼特性Fig.6 Damping characteristics of WTS transmission chain
根据图中的实验数据可知,风力机模拟器的阻尼特性具有如下两个特点:
(1) 温度相关性。风力机模拟器系统的物理传动链的阻尼特性除了与传动轴的转速相关外,还与系统运行时的温度有关。随着温度的上升,风力机模拟器传动链阻尼的等效转矩逐渐下降。
(2) 非线性。在低转速区域内,阻尼等效转矩与转速的关系更接近对数关系;在转速较高时,阻尼转矩与转速成近似线性关系。同时特性曲线簇在500 r/min和1200 r/min处有比较明显的跃变。
3.2 风力机模拟器传动链阻尼的非线性拟合
根据准确性要求,WTS的阻尼模型越精确越好。因此,工程中广泛采用的线性模型(黏性阻尼模型)[16,17]难以准确描述模拟器传动链的复杂阻尼特性。
将实验条件下电机热稳定后的轴系表面温度平均值记作Tlab,并将其在不同转速下达到转速平衡时的阻力转矩曲线作为WTS传动链的实际阻尼模型(如图7中黑色虚线所示)。在此基础上,通过对该曲线进行多项式拟合和线性拟合分别得到WTS的非线性阻尼模型和线性阻尼模型。
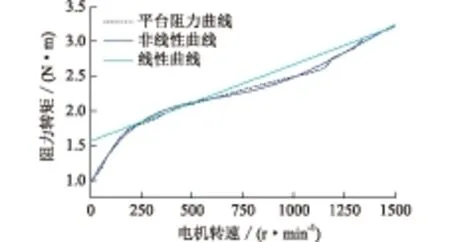
图7 WTS阻尼模型Fig.7 Damping model of WTS
3.3 基于阻尼补偿的风力机机械动态模拟方法
根据风力机模拟器的阻尼特性分析可知:
(1) WTS在进行惯量补偿时不能忽略阻尼的影响(尤其是在采用比例缩放策略时);
(2) WTS实际的阻尼特性无法用简单的线性模型描述,需要重新建模。
如图8所示,根据式(9)对WTS进行考虑阻尼补偿的风力机机械动态模拟,其中WTS传动链的阻尼模型采用3.2节中提到的非线性拟合。
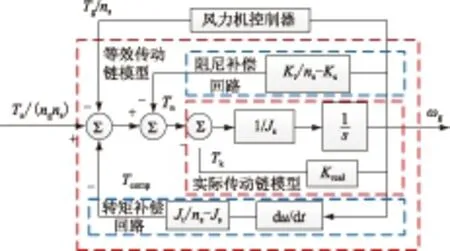
图8 考虑阻尼的传动链转动惯量补偿的数学模型Fig.8 Mathematical model of transmission chain inertia compensation considering damping
4 实验分析和验证
以NREL开发的风机仿真软件FAST[18]作为基准,以平均风能利用率作为评价指标,通过MPPT控制实验,验证应用阻尼补偿后WTS对风机机械动态模拟的改进效果。实验平台的硬件实物如图9所示,实验平台的主要参数如表2所示。发电并网系统将永磁同步发电机(permanent magnet synchronous generator, PMSG)作为实际风电机组中的发电机;实时数字模拟系统通过PLC对调速器、变频器等设备进行控制,完成机械动态模拟等功能;感应电动机(induction motor, IM)配合机械飞轮模拟风轮提供的气动转矩。

图9 WTS实验平台Fig.9 WTS experimental platform
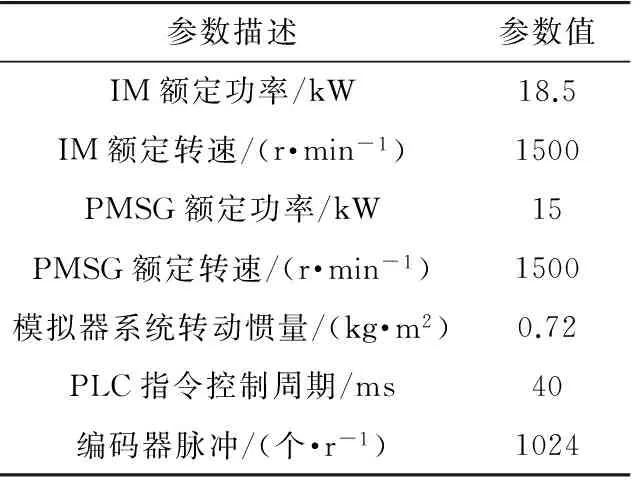
参数描述参数值IM额定功率/kW18.5IM额定转速/(r·min-1)1500PMSG额定功率/kW15PMSG额定转速/(r·min-1)1500模拟器系统转动惯量/(kg·m2)0.72PLC指令控制周期/ms40编码器脉冲/(个·r-1)1024
4.1 基于阻尼补偿的改进方法的性能验证
在缩放因子ns=50条件下进行实验,将实验环境下轴系表面温度的平均值控制在Tlab左右,利用上节中建立的非线性阻尼模型和线性阻尼模型进行阻尼补偿。将两种模型下风力机模拟器模拟CART3的实验结果与FAST的仿真结果进行对比(FAST是一款通过德国劳埃德船级社认证的开源风电机组综合仿真软件)。采用线性补偿和非线性补偿的WTS转速轨迹如图10和图11所示。
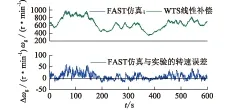
图10 线性补偿与FAST仿真对比Fig.10 Comparison of linear compensation and FAST simulation
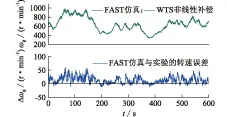
图11 非线性补偿与FAST仿真对比Fig.11 Comparison of nonlinear compensation and FAST simulation
对同一段风速下采用线性补偿和非线性补偿的WTS的平均风能利用率进行比较。平均风能利用率定义[19]如式(13)所示。

(13)
式中:tini和tfni分别是实验开始时刻和结束时刻;Pcap=0.5ρπR2Cpv3;Pwy=0.5ρπR2v3。实验结果如表3所示。
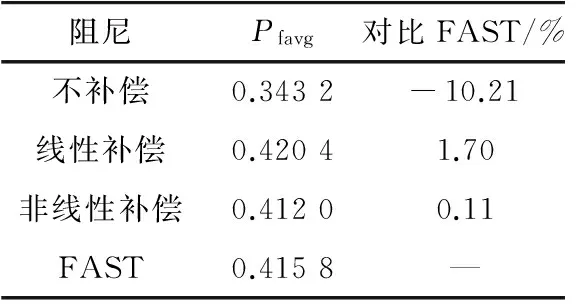
表3 阻尼补偿的WTS实验效率指标Table 3 Experimental efficiency index of WTS damping compensation
从实验结果中可知:采用阻尼补偿后WTS实验结果的转速和效率与FAST仿真结果基本一致;通过效率指标可以看出,采用非线性阻尼补偿的实验结果更加接近FAST的仿真结果。
4.2基于阻尼补偿的风力机模拟器MPPT控制实验的效果验证
为了验证基于阻尼补偿的风力机模拟器改进转矩补偿策略,本文在原有的转动惯量补偿策略中增加基于非线性阻尼模型的阻尼补偿回路。
使用模拟器对CART3风力机进行模拟,实现基于最优转矩法的MPPT控制实验。实验得到的风轮转速、实时叶尖速比以及实时风能利用系数如图12所示。
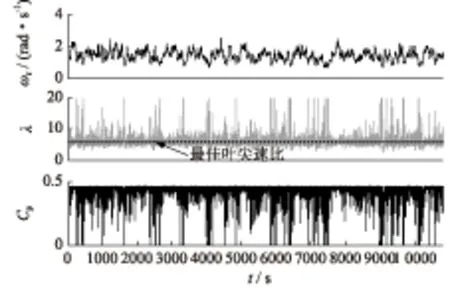
图12 最优转矩控制实验结果Fig.12 Optimal torque control experiment results
按照每隔20 min作为一个周期,将整个实验过程分成9个周期,每个周期的平均风能利用率Pfavg如图13所示。
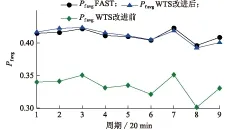
图13 WTS实验与FAST仿真的Pfavg对比Fig.13 Pfavg comparison of WTS experiment and FAST simulation
从图13中可知:采用改进策略的WTS每个周期的平均风能利用率Pfavg的变化趋势与FAST仿真相一致,同时每个周期的平均风能利用率Pfavg在数值上与FAST仿真的误差均控制在2%以内。由此可说明采用改进的转矩补偿策略可以提高WTS风力机机械动态模拟的准确性。
5 结语
本文分析了传动链阻尼对WTS准确性的影响机理,并指出阻尼补偿的必要性,在此基础上设计了基于阻尼补偿的风力机模拟器改进转矩补偿策略。最后使用基于改进策略的风力机模拟器进行MPPT实验,实验结果表明WTS不仅能够实现用于实际风力机的MPPT控制方法,并且基于阻尼补偿的转矩补偿策略能有效提高WTS机械动态模拟的准确性。
[1] HARDY T, JEWELL W. Hardware-in-the-loop wind turbine simulation platform for a laboratory feeder model[J]. IEEE Transactions on Sustainable Energy, 2014,5(3):1003-1009.
[2] 张 进, 赵春华, 钟先友,等. 风力发电机故障模拟试验台装置研制[J]. 机械设计与制造, 2013(8):120-122.
ZHANG Jin, ZHAO Chunhua, ZHONG Xianyou, et al. Design of wind turbine fault simulation test-bed device[J]. Machinery Design & Manufacture, 2013(8): 120-122.
[3] PARK J Y, LEE J K, OH K Y, et al. Design of simulator for 3 MW wind turbine and its condition monitoring system[C]∥IMECS 2010,2181(1).
[4] 陈 杰, 陈家伟, 陈 冉, 等. 基于永磁同步电机的风力机动静态特性模拟[J]. 中国电机工程学报, 2011,31(15):40-46.
CHEN Jie, CHEN Jiawei, Chen Ran, et al. Static and dynamic behavior simulation of wind turbine based on PMSM[J]. Proceeding of the CSEE, 2011, 31(15): 40-46.
[5] KOJABADI H M, CHANG L, BOUTOT T. Development of a novel wind turbine simulator for wind energy conversion systems using an inverter-controlled induction motor[J]. IEEE Transactions on Energy Conversion, 2004,19(3):547-552.
[6] NEAMMANEE B, SIRISUMRANNUKUL S, CHATRATANA S. Development of a wind turbine simulator for wind generator testing[J]. International Energy Journal, 2007,57(3):139-154.
[7] 张艳杰. 基于开关磁阻电动机的风力机模拟研究[D]. 济南:山东大学, 2011.
ZHANG Yanjie. Research on simulation of wind turbine based on the switched reluctance motor [D]. Jinan:Shandong University, 2011.
[8] HUANG J M, CHUN W U, FU X U. Design and implementa-tion of DC-module grid-connected inverter for photovoltaic system[J]. Advanced Technology of Electrical Engineering & Energy, 2014.
[9] 郑 康, 潘再平. 变速恒频风力发电系统中的风力机模拟[J]. 机电工程, 2003(6):40-43.
ZHENG Kang, PAN Zaiping. The imitation of the fan characteristic in variable-speed constant-frequency wind-power generation system[J]. Electrical and Mechanical Engineering, 2003 (6): 40-43.
[10] STEIN W M, Manwell J F, Mcgowan J G. A power electronics based power shedding control for winddiesel systems[J]. International Journal of Ambient Energy, 1992,13(2):65-74.
[11] MONFARED M, KOJABADI H M, RASTEGAR H. Static and dynamic wind turbine simulator using a converter controlled DC motor[J]. Renewable Energy, 2008,33(5):906-913.
[12] Weijie L, Minghui Y, Rui Z, et al. Investigating instability of the wind turbine simulator with the conventional inertia emulation scheme[C]∥2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, Canada:2015.
[13] LI W, YIN M, CHEN Z, et al. Inertia compensation scheme for wind turbine simulator based on deviation mitigation[J]. Journal of Modern Power Systems & Clean Energy, 2017,5(2):228-238.
[14] 李伟杰. 基于改进转动惯量补偿策略的风力机模拟器设计与实现[D]. 南京:南京理工大学, 2016.
LI Weijie. An improved inertia compensation scheme for wind turbine simulator based on deviation mitigation[D]. Nanjing:Nanjing University of Science and Technology, 2016.
[15] DARROW P, WRIGHT A, JOHNSON K. Wind turbine con-trol design to reduce capital costs[C]∥Aiaa Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Grapevine, Texas:2013.
[16] 石雄伟. 斜拉索采用粘性阻尼器的减振效果研究[D]. 西安:长安大学, 2002.
SHI Xiongwei. Study on vibration reduction effect of oblique cable with viscous dampers[D]. Xi’an:Chang’an University, 2002.
[17] 韦 勇. 阻尼结构振动系统的动力学建模、分析和修改[D]. 南京:南京航空航天大学, 2003.
WEI Yong. Dynamic modeling, analysis and updating method for damped structure vibration system [D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2003.
[18] JONKMAN J M, BUHL M L. FAST user′s guide-updated august 2005[R]. National Renewable Energy Laboratory,2005.
[19] JOHNSON K E. Adaptive torque control of variable speed wind turbines[R]. National Renewable Energy Laboratory,2004.
[20] YIN M, LI W, CHUNG C Y, et al. Inertia compensation scheme of WTS considering time delay for emulating large-inertia turbines[J]. IET Renewable Power Generation, 2017, 11(4): 529-538.

徐洋超
徐洋超(1991—),男,浙江绍兴人,硕士研究生,从事智能电网及风力发电技术研究(E-mail:xuyangchao_njust@163.com);
殷明慧(1978—),男,江苏南京人, 博士,从事风电转换系统、电力系统经济运行及电力系统暂态稳定研究(E-mail:ymhui@vip.163.com);
陈载宇(1989—),男,天津人,博士研究生,从事风力发电系统主控策略研究;
李 赟(1992—),男,江苏泰州人,硕士研究生,从事智能电网及风力发电技术研究;
刘建坤(1980—),男,山东潍坊人,高级工程师,从事电力系统仿真分析、电力系统规划和运行以及柔性交直流输电等研究工作;
汪成根(1981—),男,安徽安庆人,工程师,从事电力系统安全稳定分析等研究工作。
(编辑陈 娜)
DampingCompensationStrategyofWindTurbineSimulatorandExperimentalVerification
XU Yangchao1, YIN Minghui1,CHEN Zaiyu1, LI Yun1, LIU Jiankun2,WANG Chenggen2
(1. School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China;2. State Grid Jiangsu Electric Power Research Institute, Nanjing 211103, China)
As an important tool to emulate real wind turbine, wind turbine simulator (WTS) can simplify the experimental process and shorten the development cycle for wind power research. Because the inertia of WTS is much smaller than that of the actual wind turbine, current researches are mainly concerned with the stability of the simulated wind turbine. However, the accuracy of the WTS will be significantly affected if the damping issue was not properly handled, which will result in low speed or even affect the efficiency of WTS. In this paper, the drive train model of WTS is improved and the impact of damping on the accuracy of WTS is analyzed. The improved simulation strategy based on damping compensation is designed and implemented on the WTS experimental platform. Experiments on the maximum power point tracking control of the wind turbine validate that the improved WTS can simulate the mechanical dynamics of the wind turbine with higher accuracy.
wind turbine simulator; damping compensation; mechanical dynamic simulation; inertia compensation
TM614
A
2096-3203(2017)06-0046-07
2017-07-06;
2017-08-22
国家自然科学基金资助项目(61673213, 6177-3214);江苏省产学研前瞻性联合研究项目(BY201600413);江苏省电力公司科技项目(J2017046);中央高校基本科研业务费专项资金资助项目(30915011104)
猜你喜欢
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
测控技术(2018年5期)2018-12-09 09:04:38
科学家(2017年1期)2017-04-11 22:01:14
制导与引信(2016年3期)2016-03-20 16:02:02
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
风能(2014年1期)2014-04-26 00:00:40
振动、测试与诊断(2014年5期)2014-03-01 01:14:32