机器人触觉传感器的设计及标定测试
2017-11-23 08:36冷明鑫宋爱国
电气电子教学学报 2017年5期
冷明鑫, 宋爱国
(东南大学 仪器科学与工程学院, 江苏 南京 210096)
机器人触觉传感器的设计及标定测试
冷明鑫, 宋爱国
(东南大学 仪器科学与工程学院, 江苏 南京 210096)
本文介绍了一种典型的毕业设计工作,以传感器技术为基础,设计一种基于导电橡胶的柔性阵列式触觉传感器,构建完整的数据检测、分析和应用系统并进行标定测试,实现了对压力检测,应用于小型机械臂控制系统中。
毕业设计;触觉传感器;系统设计
0 引言
测控技术与仪器专业是一门由光学、精密机械、电子电气、自动控制、信号处理、计算机、信息技术等高新技术相互渗透而形成的密集型综合专业。由于其涉及面广,内容丰富,为了学好这门专业,学生在本科培养阶段需要完成机械、电子、信息等各方面基础知识的学习和与之相关的技能的培养,属于宽口径多方向的基础培养。这就造成学生在本科学习阶段要求掌握的知识覆盖面很广,毕业设计可选的课题方向很多,选题难度大,差异明显,选题范围不易把握。
“传感器技术”是测控技术与仪器专业的核心课程之一,本文针对于感知型机器人进行柔性阵列式触觉传感器的研发,以此作为毕业设计的一项选题,其中包括原理分析、电路设计、机械设计、软件编程、数据分析等方面,该项选题提高了学生对所学基础理论、专业知识、基本技能的综合分析与运用能力,是一种典型的毕业设计工作。
1 选题背景
机器人感知技术是机器人智能决策与控制的基础与支撑,力觉感知、触觉感知与视觉感知共同构成了机器人感知的核心内容。视觉传感可以为机器人提供大部分信息,但成本相对较高,控制过程复杂,局限性大,且在特殊情况下单一的视觉传感器难以准确地获取环境目标的运动位置与物理特性,力觉、触觉信息必不可少。而触觉系统简单,成本低,对环境要求小,分布灵活,应用范围更广[1]。本项目以本科毕业设计为载体,对于感知型机器人进行柔性阵列式触觉传感器的研发,并应用于小型机械臂的控制中,构建感知性机器人实验验证系统。
2 项目的设计
2.1柔性阵列触觉传感器设计
1)敏感材料选取
目前常用的触觉传感器,其原理包含了电阻、电容、电磁、压电、光电、机械、超声等各个方面,本项目中采用压阻式原理,创新性地提出了以复合导电橡胶作为敏感材料,完成阵列式压阻式传感器的设计。其具有良好的柔韧性,低成本,在一定的压力范围内,通过简单的分压电路及ADC采集电路即可完成电压与压力间的转换[2][3]的优点。
2)结构设计
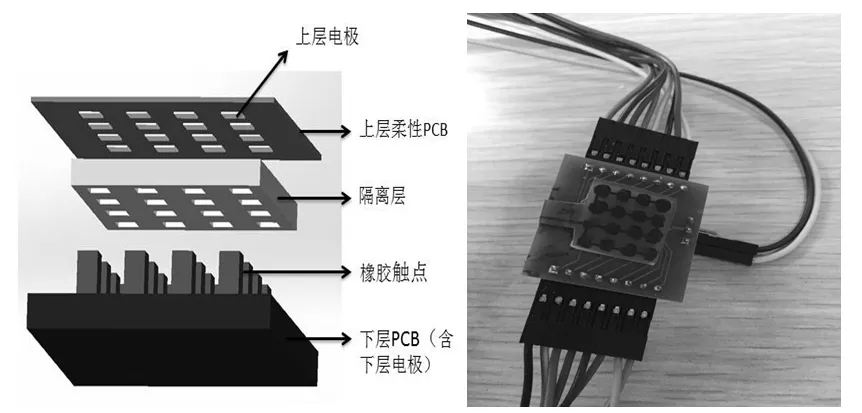
(a)结构图 (b)实物图图1 触觉传感器
(a)原理图 (b)实物图图2 触觉传感器电路图
整个结构由上层电极、隔离层、橡胶触点和下层电极四部分组成,如图1(a)所示。上层电极为柔性PCB层,下层电极为硬质PCB层,其上对应位置以4x4的阵列结构分布着1.5 mmx1.5 mm的正方形电极,电极之间以1.5 mmx1.5 mmx3 mm的立方体导电橡胶连接并通过4x4阵列结构隔离层隔开,将外力传递到橡胶触点,如图1(b)所示。下层硬质PCB层上设有定值电阻,滤波电容等分压滤波电路(如图2),假设敏感材料阻值为R,定值电阻阻值为r,则触点电压值为Vout =V*R/(r+R),该项目中选取r=1 kΩ,R=10 kΩ,完成触觉传感器结构设计[4]。
2.2标定装置设计
本项目中所设计的触觉阵列传感器体积较小,触点的接触面积小,需要设计小型的标定装置对其进行标定。利用杠杆平衡原理,通过对铝合金进行精加工,设计标定装置如图3所示。
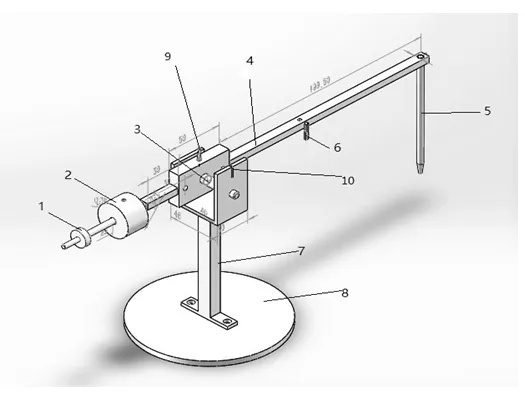
图3 标定装置
图中,1:微调螺母2:粗调配重3:中心转动轴4:横臂5:施力探针6:挂孔,用来挂砝码7:支撑座8:底座9:调平针10:调平孔,用于检测标定装置是否平衡。
2.3数据信息获取与分析处理
1)系统结构
整个处理系统由处理电路、单片机数据采集、上位机显示终端三部分组成,测试系统结构图如图4所示。
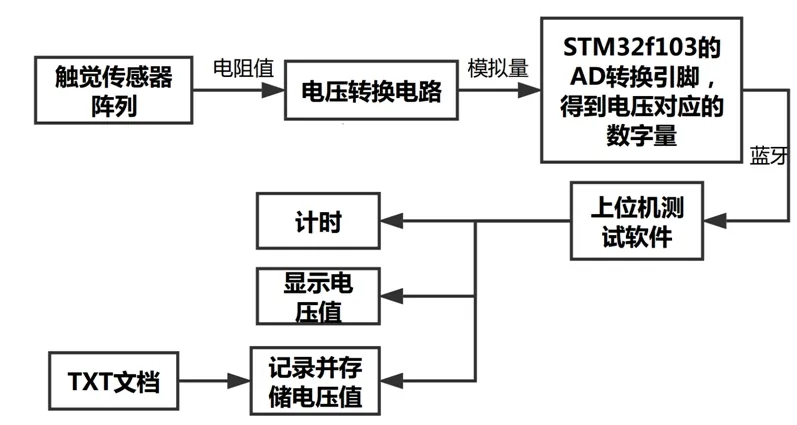
图4 测试系统结构图
2)下位机系统
下位机系统使用STM32F103单片机及AD转换芯片完成。传感器将采集到的压力信号转换为电信号,AD转换芯片将电信号转换为数字信号,通过单片机读取并通过蓝牙发送至上位机。
3)上位机系统
当上位机接收到下位机发来的信号后,对信号进行相关处理并进行相关数据的图像化展示。上位机系统包括串口通信、图表显示、数据记录和数据显示四个部分。上位机使用MFC进行开发,利用了MSCOMM控件完成串口数据的读取,MSCHART控件完成图表信息的展示,同时辅助以文件读取、定时器等相关部分完成整个系统的相关功能,上位机系统如图5所示。
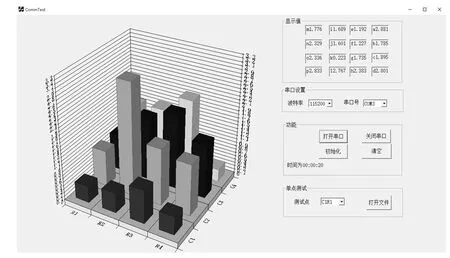
图5 上位机系统软件
2.4触觉传感器测试
触觉传感器测试采用自制的校准装置和若干个50 g标准砝码完成,任意选取三个触点,逐渐增加触点上方的压力大小,并记录测试数据。
实验得知,触点受力越大,对应的电阻越小,检测到的电压值也越小。触点在受力的瞬间阻值快速下降,随着时间的延长,阻值缓慢下降,30 s后基本达到稳定。
假定60 s时测量的值即为稳定值,取三个点正向和逆向在不同压力下测量的稳定值。由于触点电压与外力呈现负线性关系,为了便于分析,将初始电压-测量电压的差值作为传感器的输出值y,将装置上砝码的重量乘以比例系数0.44,再将砝码g数转换为分辨力N数,作为输入值x进行分析。测试数据如表1所示。
首先,对数据进行线性度分析。对正反行程的各个测量值分别取平均值,得到各个压力下对应的电压平均值,在Matlab中,用polyfit()函数,对得到的数据分别拟合,得到拟合的直线方程为:
y=0.244x+0.272
(1)
其测量值和拟合曲线如图6所示。
根据拟合方程计算各个压力下对应的拟合值,与测量值相对比,由此可知其非线性误差为
表1触觉传感器测试数据
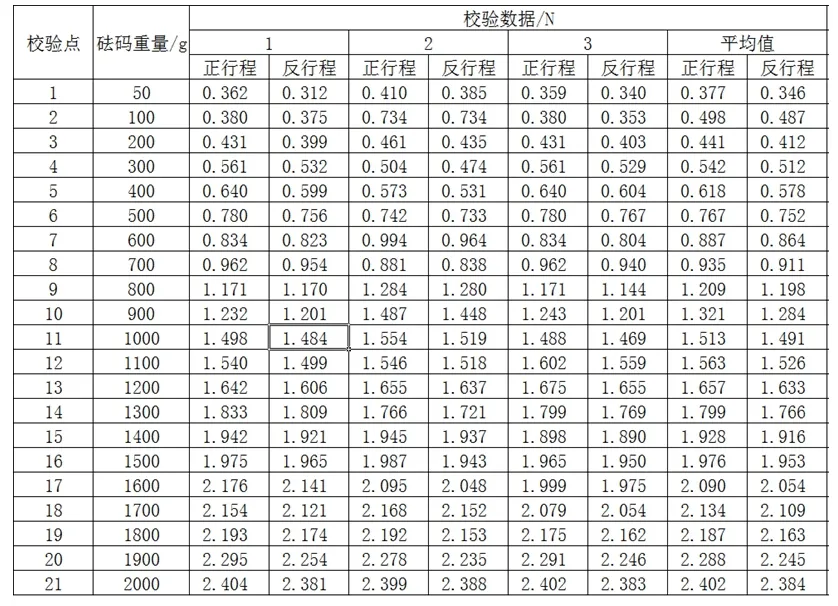
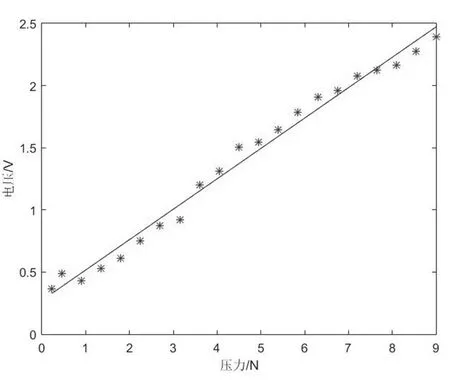
图6 拟合曲线图
(2)
其次,进行迟滞误差分析。计算正反行程测量值的差值,根据迟滞误差的定义可以计算:

(3)

综上所述,该柔性阵列触觉传感器线性度和灵敏度较好,但滞回误差比较大,滞后性比较大,动态特性较差,从受到外力到达到稳定需要较长的时间,原因可能是导电橡胶的驰豫特性导致的。
2.5感知型机器人系统
该传感器可应用于基于schunk机械臂的地面遥操作验证系统,本系统采用手控器作为人机交互设备,远程控制schunk机械臂进行遥操作任务。主要由手控器、地面主控端、通信网络、空间机械臂等部分组成。系统主控端,使用网络UDP通信协议完成对schunk机械臂的控制,并进行数据的传输,人机交互模块与手控器之间采用串口通信的方式进行数据传输交互。由于触觉传感器需要安放在机械手的顶端,为了不影响其操作性能,采用无线蓝牙与主控端进行数据传输,主控端直接获取压力信息,主控端界面如图7所示:

图7 系统主控端界面
实验证明,整个系统运行良好,可以在实现原有机械臂的操作、虚拟环境预测、力反馈的基础上,对机械臂末端的触觉力进行读取。通过控制手爪的张开角度来调整夹持的力度,完成对物体的有效抓取。由于触觉传感器与系统通过串口通信,适用性强,可以更换不同的传感器,便于移植。
3 项目中的问题及解决方法
(1)理论准备:整个项目包括传感器原理分析、敏感材料选择、硬件电路设计、机械结构的设计及装配以及软件编写等部分,涉及到学生在本科阶段所学的传感器、C++、单片机、模拟电路、机械设计等各方面知识。在项目进行的过程中加深了学生对这些理论的理解,如各种传感器的原理及各自的优缺点,MFC中串口类的使用等,同时提高了学生查阅文献、归纳总结、自主创新的能力,提高了他们的科研能力。
(2)硬件结构搭建:在校准装置的设计过程中,除了需要考虑功能性,还需要考虑制作成本、装配顺序、加工精度、公差尺寸、稳定性等,否则理论上可行的设计方案,但在实际操作中由于加工误差等因素可能会导致装配失败。同理在PCB设计制作过程中也要考虑焊接、隔离、布线等问题。
(3)软件学习:整个过程需要用到Altium Designer、SolidWorks、VS2010等软件,学生通过书籍阅读、网络查阅、视频教学等,掌握软件的用法以及MFC编程知识来实现所需功能,将理论用于实践,学以致用。
4 结语
本文以柔性阵列式触觉传感器研发为基础,介绍了一个典型的毕业设计工作,构建了一套数据获取、分析以及应用的软硬件系统。实验证明,该传感器结构简单,成本低,柔韧性好,便于大面积扩展和阵列化,可以用于点压力检测和面压力的检测。将传感器应用到遥操作系统中加以验证,通过控制机械臂运动,传感器可以实时采集并返回相关实验数据,为后期该传感器的进一步拓展提供了保证。该毕业设计被评为“东南大学2016年校级优秀本科毕业设计(论文)”,是测控技术与仪器专业典型的选题案例。
[1] 龚雪,张认成,张晓华等.触觉传感器述评[J].天津:仪器仪表用户,2005,12(5):3-4.
[2] 付朝阳,李斌,张学勇等. 导电橡胶力敏传感器研究进展[J]. 哈尔滨:传感器与微系统, 2013, 32(6):1-4,8.
[3] 黄英. 基于压力敏感导电橡胶的柔性多维阵列触觉传感器研究[D]. 合肥:合肥工业大学, 2008.
[4] 刘颖. 触觉传感器阵列信息获取与分析处理[D]. 重庆:重庆大学, 2007.
TheDesignandCalibrationTestofTactileSensorforRobot
LENGMing-xin,SONGAi-guo
(SchoolofInstrumentScienceandEngineering,SoutheastUniversity,Nanjing210096,China)
This paper introduces a kind of typical graduation project, that is developing a small flexible array tactile sensor with conductive rubber. Meanwhile, a complete system is designed to obtain and analyze data and to complete the calibration test, achieving pressure detection. In the end,this sensor is applied to the control system of small manipulator.
graduation project ;tactile sensor;system design
2016-10-09;
2016-11-22
冷明鑫(1992-),女,在读研究生,研究方向为测控技术与智能系统,E-mail:lmx_seu@qq.com 宋爱国(1968-),男,教授,主要从事机器人技术、传感器的研究,E-mail:a.g.song@seu.edu.cn
A
1008-0686(2017)05-0062-04
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
海外星云(2021年6期)2021-10-14
玩具世界(2021年6期)2021-04-19
军民两用技术与产品(2020年8期)2020-09-07
山东工业技术(2019年13期)2019-05-30
浙江工贸职业技术学院学报(2019年4期)2019-03-11
电子制作(2018年9期)2018-08-04
特别健康(2018年3期)2018-07-04
工业设计(2016年4期)2016-05-04
工业设计(2016年10期)2016-04-16