国外在轨服务系统最新发展(上)
2017-11-22 06:20王雪瑶北京空间科技信息研究所
国际太空 2017年10期
王雪瑶 (北京空间科技信息研究所)
国外在轨服务系统最新发展(上)
Development of Foreign On-orbit Service Systems (Ⅰ)
王雪瑶 (北京空间科技信息研究所)
近年各国持续推进在轨服务系统的项目研究,主要涉及辅助变轨、碎片移除、在轨燃料加注与延寿、在轨装配和在轨维修与升级几个方面。其中,美国重点关注在轨装配、在轨燃料加注任务与相关技术,欧洲重点关注低地球轨道(LEO)碎片移除任务与相关技术,日本、德国等依托自身先进的机械臂技术开展在轨服务项目。从现有发展规划来看,目前在轨服务系统的发展还处于初级阶段,各系统将在2020年前后实现在轨演示试验。随着航天技术的不断发展,未来将会实现更多多功能业务型的在轨服务,航天资产也将向在轨可建造、在轨可扩展、在轨可重构的方向发展。因此,在轨服务系统将是未来航天发展的一个重要方向。
1 辅助变轨
辅助变轨航天器可以帮助各类目标航天器进行轨道转移,可用于低地球轨道转移至地球静止轨道(GEO)等的辅助变轨任务,也可用于深空轨道转移的辅助变轨任务。近年美国主要以研究深空辅助变轨试验项目为主。
“太阳能电推进器”拖船
“太阳能电推进器”(SEP)拖船是2011年美国国家航空航天局(NASA)提出的以辅助变轨为目的的在轨服务工程项目,重点是辅助大型深空探测器完成深空变轨任务,也可用于低地球轨道的辅助变轨任务。
美国国家航空航天局原计划在2017年开启首个“太阳能电推进器”拖船任务,即利用拖船将探月航天器运输至环月轨道或地月拉格朗日点,完成6个月的探测任务,但目前并未实施,该任务可以验证拖船的深空长时间机动能力,同时也可以验证在出现问题时拖船快速返回地球的能力。美国同时计划在2019年利用“太阳能电推进器”拖船开启近地小行星探测任务,2020年利用拖船开启3次火卫一探测任务,2025年利用拖船开启3次火星探测任务,并在2033年利用拖船辅助火星探测器与航天员完成为期500天的载人火星表面停留任务。

“太阳能电推进器”拖船辅助探火任务示意图
“太阳能电推进器”主要利用先进的太阳能帆板和高效的霍尔推进器,推进器比冲是常规化学推进系统的10倍,可以达到3000s,能够为大型深空探测器提供高效的推力,使其顺利进入目标位置。美国国家航空航天局计划研制300kW和600kW两种推进功率的拖船,其中300kW拖船将辅助完成探月及小行星探测任务,600kW拖船将辅助完成火星探测及火星卫星探测任务。
“轨道机动运载器”
为提高在轨部署的灵活性,近年美国穆格公司(Moog)研发“轨道机动运载器”(OMV)作为小卫星的低成本发射设备,为小卫星提供共享发射机会,能够辅助小卫星搭载发射至目标轨道,完成优化部署小卫星星座等多项任务。现该项目已完成低轨任务“轨道机动运载器”的内部设计评审,计划在2018年底发射低轨“轨道机动运载器”。
“轨道机动运载器”采用“演进型一次性运载火箭次级有效载荷适配器”(ESPA)作为基础架构,在此基础上新增加高适应性的推进结构、先进灵活的航电结构、模块化的电源系统等提供推力,也可根据具体任务进行扩展升级。低轨任务“轨道机动运载器”可共计产生340m/s速度增量,有效载荷运载能力为1500kg。未来深空任务“轨道机动运载器”将采用结构更大、更坚固的ESPA环,并采用肼和四氧化二氮双组元推进系统,可共计产生1690m/s速度增量,有效载荷运载能力为500kg。
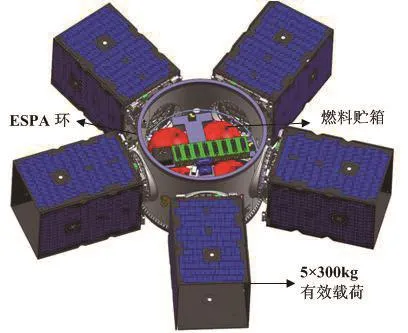
低轨任务“轨道机动运载器”示意图
2 碎片移除
目前空间碎片的形势相当严峻,空间碎片数量庞大,空间碰撞概率大大增加,空间环境更加恶劣,轨道资源越来越稀缺,需要在轨服务系统对失效卫星和空间碎片等进行离轨、移除等处理。
“欧洲离轨”任务
“欧洲离轨”(e.Deorbit)任务是2012年欧洲航天局(ESA)提出的移除低轨大型空间碎片的工程项目,验证低轨碎片移除技术。“欧洲离轨”任务航天器计划于2023年发射,将成为世界首例主动碎片移除任务,也将使欧洲航天局成为空间碎片移除领域的全球领军者。
“欧洲离轨”任务的主要目标是使用航天器捕获800~1000km近极地轨道/太阳同步轨道(SSO)上的属于欧洲航天局的非合作大型空间碎片(主要是4t以上的卫星或上面级),并将其快速移至地球大气层燃烧消除。经过长时间的论证工作,2016年7月,欧洲航天局将离轨目标选定为现已失效的“欧洲环境卫星”(Envisat)。这颗卫星是欧洲最大的民用对地观测卫星,于2001年发射入轨,在轨尺寸为26m×10m×5m,质量8211kg。该卫星在2012年失效且不停旋转,每年将会与2个编目目标距离达200m内,很可能引发碰撞,根据卫星的运行轨道与面质比计算,预计其将继续在轨停留150年。因为这颗卫星危险性大,所以欧洲航天局选取该星作为离轨目标验证主动碎片移除技术。
该任务需要解决三项挑战,一是识别、接近旋转目标,并与之同步运动;二是安全捕获旋转目标;三是将旋转目标安全离轨。航天器在轨捕获技术是该项目的关键技术,此前欧洲航天局论证了“机械臂捕获”、“鱼叉捕获”、“绳系捕获”和“抓捕网捕获”四个任务方案。但因目标质量较大,又失控旋转,其他方式捕获不适合,最终欧洲航天局选取波兰SKA Polska公司设计的1300kg抓捕网作为目标抓捕机构,抓捕网需要在真空微重力环境下抓捕失控旋转目标。
“德国在轨服务” 任务
“德国在轨服务”任务(DEOS)是2007年德国航空航天中心(DLR)在“空间系统演示验证技术卫星”(TECSAS)项目(2006年终止)的基础上,重新定位任务目标,提出的后续自主处理故障卫星技术演示项目。目前,该项目已在地面和“国际空间站”(ISS)进行了多项接近、对接抓捕等模拟仿真试验,德国航空航天中心计划在2018年进行在轨试验。
德国航空航天中心研制在轨服务与维护系统的时间较长,具有丰富的空间机械臂研究经验,曾开展“哥伦比亚”航天飞机ROTEX机械臂项目、试验服务卫星项目、“空间系统演示验证技术卫星”项目等。“德国在轨服务”项目采用了德国航空航天中心多年的空间机械臂研制试验经验。

“德国在轨服务”任务示意图
“德国在轨服务”项目系统包括服务卫星与客户卫星两部分,服务卫星能够利用专用的抓捕机构捕获滚转的非合作客户卫星,其中服务卫星尺寸2.6m×1.7m×1.8m,质量732kg,客户卫星尺寸1.9m×1.3m×1.3m,质量268kg。“德国在轨服务”任务包括发射与早期入轨、在轨测试、在轨操作和离轨再入4个标准运行阶段。在发射与早期入轨阶段,服务卫星与客户卫星刚性连接,一同发射至高550km、倾角85°~90°的初始圆轨道。刚性连接组合体发射入轨后,经在轨测试后进入在轨操作阶段,服务卫星在安全位置释放客户卫星并远离客户卫星,随后,服务卫星通过定向导航指引机动至客户卫星附近,与客户卫星实现相对停泊。在相对停泊期间,服务卫星利用机械臂抓捕翻滚的客户卫星再次形成组合体。最后,该组合体将离轨至再入走廊,随后受控再入至大气层烧毁。
太空清理-1
太空清理-1(CSO-1)项目是瑞士2012年正式启动的在轨碎片移除试验项目,最初由瑞士航天局(SSO)负责,2014年移交至洛桑联邦理工学院航天工程中心(ESpace)。该项目旨在离轨“瑞士立方体小卫星”(SwissCube),演示小卫星主动碎片移除技术。现阶段已完成太空清理-1捕获系统的原型样机,下一阶段将研制开发工程机,将在2018年之后发射。
“瑞士立方体小卫星”是1U立方体卫星,尺寸为100mm×100mm×113.5mm,运行在高720km、倾角98.4°的太阳同步轨道上,质量约820g,数据下行链路与上行链路天线长度分别为180mm和610mm。因为“瑞士立方体小卫星”尺寸很小,难以探测,且高速翻滚,最大旋转角速度可达50°/s。所以在该项目中,服务航天器既要解决缺少非合作目标位置信息、难以探测的问题,又要解决目标高速旋转的问题。为解决第一项挑战,太空清理-1携带高效的计算机视觉系统,可计算太阳的角度、目标的尺寸、目标的移动速度,以及太空清理-1自身的旋转速度等,能对目标进行跟踪与近距离操作。为解决第二项挑战,洛桑联邦理工学院航天工程中心需要针对高速旋转的目标设计最有效的捕获系统。太空清理-1设计人员最终选取抓捕可靠性更高的PacMan设计方案,该方案由瑞士学生设计。一旦目标“瑞士立方体小卫星”进入太空清理-1的作用范围内,服务卫星就会在目标卫星周围展开圆锥体网,随后闭合圆锥体网捕获目标。
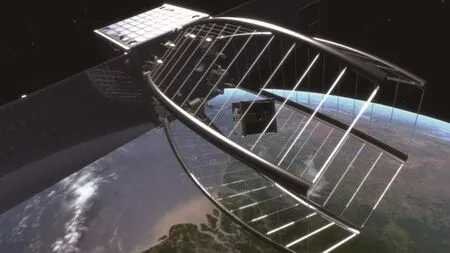
太空清理-1捕获“瑞士立方体小卫星”示意图
“空间碎片微型清除器”
“空间碎片微型清除器”(SDMR)是日本宇宙航空研究开发机构(JAXA)正在研究的一种演示验证空间碎片主动移除技术的微小卫星试验项目,现已完成多项地面试验和飞行试验,计划2020年开展在轨演示验证试验,随后发展大型业务空间碎片清除系统。
“空间碎片微型清除器”将使用小卫星夹持机械臂抓捕空间目标碎片,并使用电动系绳将其离轨。具体任务过程为:首先,清除器与目标空间碎片自主交会,并测量其运行轨道。然后,清除器绕飞目标,确定捕获的最佳路径。随后,清除器逼近目标并用夹持机械臂捕获目标,之后,展开固定在机械臂上的电动系绳。最终,清除器自动调节电动系绳的倾角来控制推力,携带碎片离轨。
清除器要捕获的目标通常是失控的碎片,机械臂无法直接抓取高速翻转的目标碎片。为解决这一问题,日本拟采用电刷接触器,在靠近碎片后,通过接触磨擦碎片表面将其转速减慢至静止,以便于机械臂捕获目标。日本在2010年就已完成电动系绳推进的在轨演示试验,但在2016年底的电动系绳在轨部署试验中却遭遇失败。

日本空间碎片清除系统三维概念示意图
3 在轨燃料加注与延寿
在轨卫星资产不断增加,而通常在卫星燃料寿命末期,天线、有效载荷等其他部件通常还可继续使用,如果可以利用在轨服务器进行在轨补加,或为目标卫星提供动力系统,则可以相应延长卫星的寿命,获得更大的经济利益。
复原-L在轨补加任务
复原-L(Restore-L)在轨补加任务是2014年美国国家航空航天局卫星服务能力办公室(SSCO)启动的试验项目,旨在验证对低地球轨道合作与非合作目标的在轨燃料加注技术。目前,复原-L任务已在2017年8月完成初步设计评审(PDR)。复原-L预计在2020年发射,如果该任务成功,则将成为世界首例低地球轨道在轨燃料加注任务。在整个任务期间,复原-L将对目标卫星进行交会、抓捕、燃料加注与重新定位等服务。
复原-L可为目标卫星储存并提供燃料,其特有系统是燃料运输系统,能够对目标卫星进行长时间、多任务的燃料补给,该系统由氧化剂贮箱、低密封泵、流量计量器、燃料运输管道等组成,其中低密封泵能够在高压下传送氧化剂,流量计量器能够保证燃料转移系统定量、准确地传输推进剂。美国国防高级研究计划局(DARPA)的“前端机器人操作演示验证任务”(FREND)机械臂也是复原-L有效载荷的一部分,能够执行抓捕目标卫星等操作。此外,复原-L自主遥操作需要使用S频段低数据率下行链路和高数据率上行链路,视频与遥操作需要使用Ka频段高数据率上、下行链路。
按照计划,复原-L将发射至极地低轨道,目标卫星已选定为美国政府的陆地卫星-7(Landsat-7)。复原-L任务的具体过程为:复原-L成功入轨后进行约53天的在轨测试,测试完成后通过15天机动转移至目标陆地卫星-7附近,随后与目标卫星进行为期4天的自主交会对接和4天的在轨服务,具体服务操作包括切割覆盖物、切割燃料输送管、移除阀帽、在轨加注和还原覆盖物等。复原-L在完成在轨服务任务后,需要17天离轨至任务后处理轨道,最后2天完成销毁操作。整个任务过程计划需要92天时间,同时需要地面站、GPS卫星、中继卫星、遥操作等技术先进设备支持整个任务过程。

复原-L近距离在轨服务示意图
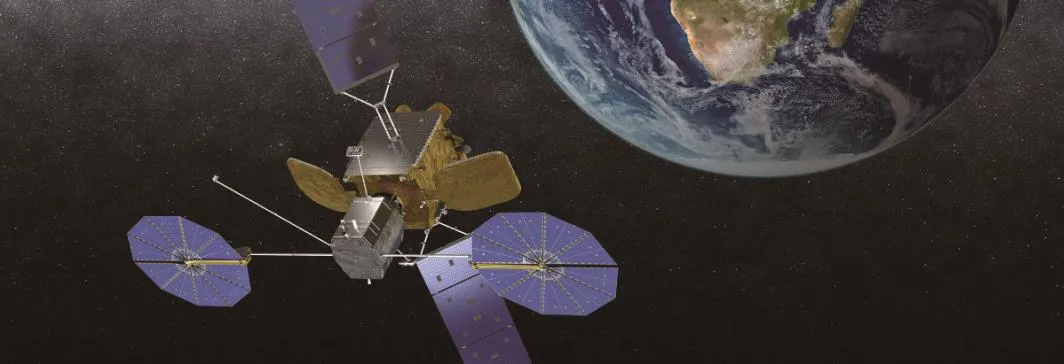
“无人延寿飞行器”任务示意图
“无人延寿飞行器”
“无人延寿飞行器”(MEV)是2011年美国维维卫星公司(ViviSat)提出的地球静止轨道卫星延寿项目,美国维维卫星公司由美国航天公司(US Space)与轨道-ATK公司(Orbital ATK)共同建立。“无人延寿飞行器”将采用轨道-ATK公司的GEOStar3平台与“天鹅座”(Cygnus)交会对接技术,具有灵活性高、可升级性好及风险低等特点,能保证空间资产的可持续利用。2016年,该项目转移至轨道-ATK公司的全资子公司—空间物流公司(Space Logistics)负责,并与国际通信卫星公司(INTELSAT)签订首个为期5年的“无人延寿飞行器”合同。
按计划,空间物流公司至少发射5个“无人延寿飞行器”,将在2018年发射首个,2019年和2020年各发射2个。“无人延寿飞行器”的设计寿命是15~20年,将执行3~4次延寿任务,每次任务时间为1~5年。为确保安全,首个“无人延寿飞行器”入轨后首先会进入坟墓轨道与失效卫星连接进行在轨测试,随后进入地球静止轨道对业务卫星进行在轨服务。“无人延寿飞行器”使用简单的机械对接系统与客户卫星的远地点发动机进行对接,这一系统适用于目前80%的地球静止轨道卫星。与目标卫星对接成功后,“无人延寿飞行器”将根据需求对组合器进行姿态与轨道保持管理。完成服务后,“无人延寿飞行器”与目标卫星分离,转移至下一个客户卫星进行服务,其交会对接系统可重复利用,对多个目标进行服务。
除在轨延寿服务外,“无人延寿飞行器”还将实现转移目标位置或改变目标轨道倾角的重定位功能。未来,“无人延寿飞行器”还将逐步增加在轨维修与在轨装配等功能,也可能增加机械臂等抓捕结构。(未完待续)
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06
上海船舶运输科学研究所学报(2022年3期)2022-08-05
都市人(2022年3期)2022-04-27
国际太空(2021年8期)2021-11-05
活力(2021年4期)2021-07-28
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
环球时报(2019-12-05)2019-12-05
太空探索(2014年4期)2014-07-19
太空探索(2014年5期)2014-07-12