
执行器故障卫星的自适应模糊滑模容错控制*
2017-11-21 04:28:45屠园园王大轶李文博
航天控制 2017年5期
屠园园 王大轶 李文博
1. 北京控制工程研究所, 北京100190 2. 北京空间飞行器总体设计部, 北京100094
执行器故障卫星的自适应模糊滑模容错控制*
屠园园1王大轶2李文博1
1. 北京控制工程研究所, 北京100190 2. 北京空间飞行器总体设计部, 北京100094
针对卫星控制系统执行器故障,考虑干扰与不确定性影响,设计了一种自适应模糊滑模容错控制器(AFSMC)。首先,将执行器故障、干扰以及模型不确定性统一描述为系统的广义总干扰;然后,为使系统能够在有限时间内快速稳定且避免奇异,设计了非奇异快速终端滑模控制器(NFTSMC);其次,针对滑模系统固有的抖振现象,设计了自适应算法对系统广义总干扰进行补偿,减小了切换增益,并以自适应模糊系统逼近切换函数,柔化了输入信号,从而有效削弱了系统抖振,大大提高了控制精度;最后,对所提方法进行了数值仿真验证。
姿态跟踪;滑模控制;干扰补偿;自适应模糊;Lyapunov稳定性
随着航天技术的发展,越来越多的卫星在执行相关任务时,需要在机动过程中保持高精度的姿态稳定能力。结合实际工作环境,考虑运行过程中存在的干扰、噪声等恶劣情况,卫星的控制分系统不可避免地会发生故障[1-4],尤其是长期处于高速运转状态的执行机构,其故障会严重影响控制精度[5-6]。为保证系统能够高精度地顺利完成既定任务,需提高其对执行器故障的鲁棒能力。因此,本文重点研究卫星在姿态跟踪过程中的容错控制问题。
由于滑模变结构控制技术在处理故障时无需故障诊断单元,具有良好的自主容错性能,且能克服系统各种不确定性因素的影响,对干扰和未建模动态具有较强的鲁棒性,近年来被广泛应用于航天器控制理论研究[7-10]。
然而,对滑模变结构控制而言,当系统轨迹到达切换面时,惯性使得运动点穿越切换面,产生抖振现象,不仅影响控制精度、增加能量消耗,还易激发系统中的高频未建模动态,破坏系统性能,甚至导致系统振荡或失稳,损坏控制部件。 针对该问题,一些学者提出了模糊滑模控制器的概念[11-13],利用模糊系统对切换函数进行“模糊化”,以柔化控制信号,有效减弱系统由于不连续而引起的抖振现象。然而,由于模糊系统精度不高,自适应能力有限,难以有效抑制系统的突发故障、干扰以及模型不确定性等复杂因素对姿态精度的影响,因此限制了控制精度的进一步提高。
1 卫星运动建模
基于单位四元数,给出卫星运动学方程为:
(1)

执行器故障的卫星动力学方程可以描述为:
(2)
其中,J∈3×3为卫星转动惯量,U∈3×m为执行器安装矩阵,Λ=diag{α1,α2,…,αm}为执行器失效因子矩阵,αi∈[0, 1],i=1,2,…,m;τ∈m为执行器输出列阵,f∈m,d∈3分别为执行器偏差故障和系统外部干扰。
qe=E(qd)q
(3)

基于误差四元数,得到跟踪误差运动学方程:
(4)

可推得航天器跟踪误差动力学方程:

(5)
考虑参数不确定性,假设实际的系统惯量矩阵为J=J0+ΔJ,其中,J0为已建模标称惯量矩阵,ΔJ为不确定部分,则式(5)可改写为:

(6)

(7)


(8)
2 自适应模糊滑模控制器设计
为使卫星能够在有限时间内快速收敛,且有效避免奇异,本文选择非奇异快速终端滑模控制器为系统主控制器。相应滑模面表示如下:
(9)
其中,α,β>0, 1
p/q。
2.1 常规NFTSM控制器
常规的变结构控制器可以设计为:
u=ueq+uvss
(10)




若存在:
(11)

2.2 基于干扰补偿的NFTSM控制器
2.2.1 控制器设计
假设G∈3是系统的广义总干扰,包含执行器偏差故障、参数不确定性以及各种干扰力矩,满足若分别是G的估计值和理想观测值,则估计误差:
(12)
为使卫星能对期望姿态进行有效跟踪并加以保持,这里基于Lyapunov函数来设计控制器。选择Lyapunov函数如下:
(13)
其中,W-1∈3×3是正定对称矩阵。对上式求导:
(14)
结合式(9)和(14)可推得:


(15)
相应的控制器设计如下:

(16)
其中,φ是基于双曲正切的鲁棒控制项,
(17)
引入该项是为了补偿估计算法的近似误差。由双曲正切函数性质可知φ满足:STφ>0。
2.2.2 稳定性证明
证明:选取Lyapunov函数如下:

对时间t求导,并带入控制律式(16)得:


(18)
对比式(11),可知引入干扰补偿后切换增益项η大大降低,有效削弱了系统的振颤。
当系统状态在滑模面上时,S=0,由滑模面定义式(9)得:
(19)
2.3 自适应模糊滑模控制器
控制律式(16)中的符号函数sign(S)是导致系统抖振的直接原因,非常不利于实际执行。为了能够既削弱系统抖振,又保持滑模变结构控制对执行器故障、模型不确定性以及干扰等实际因素的鲁棒性,本小节采用自适应模糊系统对符号函数进行逼近,该系统的输入为滑模面S,输出为符号函数的估计值。
设ufz=ηsign(S),其各分量估计值为:
(20)

(21)
假设理想的调整参数向量为θ*,则实际调整参数的误差向量可以定义为:
(22)
基于Lyapunov函数可以推导参数θ的自适应律,建立如下Lyapunov函数:
(23)
对上式求导得:


(24)

(25)
(26)

由式(22)可得调整参数的自适应变化律为:
(27)
对上述自适应模糊系统,定义模糊集:NB=负大,NM=负中,NS=负小,ZE=零,PS=正小,PM=正中,PB=正大。
隶属度响应函数为:
μNB=1/{1+exp(10(x+5π/6))},
μNM=exp(-2(x+2π/3)2),
μNS=exp(-2(x+π/3)2),
μZE=exp(-2x2),
μPS=exp(-2(x-π/3)2),
μPM=exp(-2(x-2π/3)2),
μPB=1/{1+exp(10(x-5π/6))}。
3 数值仿真
下面对本文提出的自适应模糊滑模容错控制器(AFSMC)的有效性进行数值仿真验证,并与常规NFTSMC、含干扰补偿的NFTSMC进行对比分析。期望运动模型参考文献[14],卫星及控制器参数分别由表1~2给出,仿真结果如图1~4所示。
表1 卫星参数
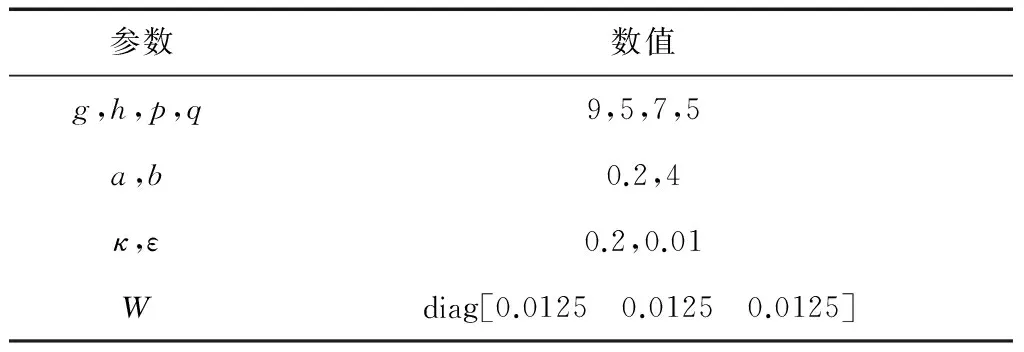
表2 控制器参数
观察图1~3可知,未发生故障时,在3种控制器作用下,系统均可于13s内稳定。采用常规NFTSMC的系统,受符号函数影响,存在明显抖振现象,稳定后控制力矩在0.0015N·m内振荡,误差角速度精度为0.003(°)/s,滚动轴与俯仰轴存在1°左右的偏差。引入干扰补偿以后,系统振颤现象明显减弱,控制力矩减小到0.001N·m,而控制精度并未显著提高。采用AFSMC的卫星,相比前2种情况,抖振现象明显削弱,误差角速度和姿态偏差角精度分别达0.0008(°)/s和 0.001°。
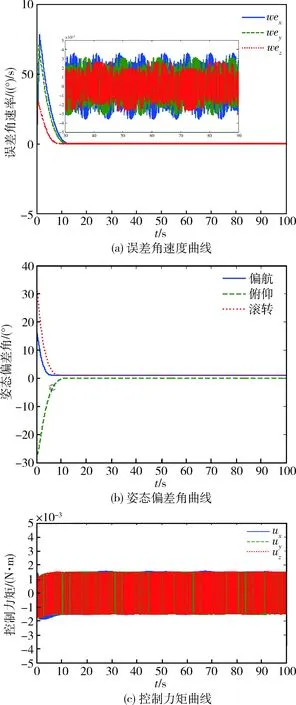
图1 常规NFTSMC仿真曲线
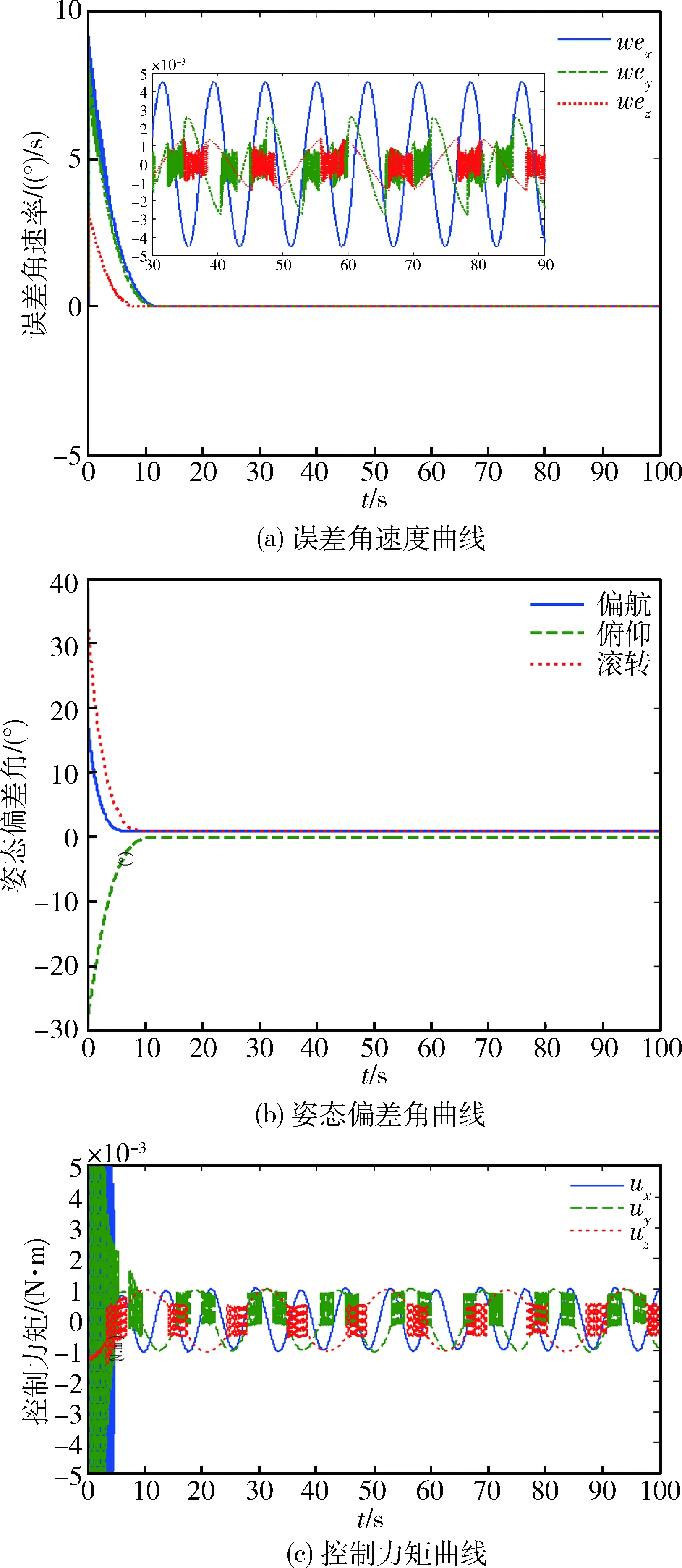
图2 加干扰补偿的NFTSMC仿真曲线
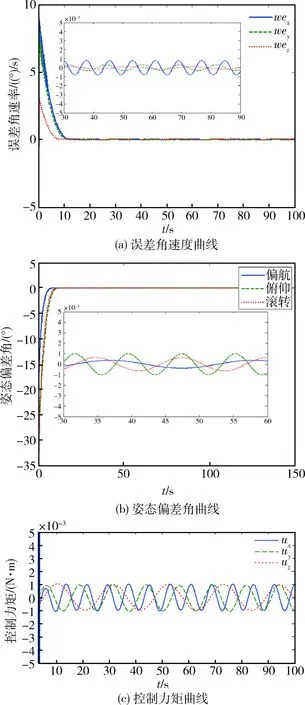
图3 AFNFTSMC仿真曲线
因此,可以得出结论:常规NFTSMC方法能够较好、较快地进行姿态跟踪,但变结构控制固有的抖振现象影响了系统实际性能、限制了姿态跟踪精度。在此基础之上,引入自适应干扰补偿器,可以减小切换增益,从而有效削弱系统振颤,但控制精度仍然没有显著提升。而本文所提AFSMC方法,进一步以自适应模糊模块逼近控制律中的切换项,不仅有效削弱了系统抖振,而且显著提高了控制精度。

图4 AFNFTSMC容错曲线
4 结论
针对卫星姿态跟踪控制过程中可能发生的执行器故障,考虑干扰和模型不确定性等影响,设计了具有容错功能的自适应模糊滑模控制器。结合数值仿真,得到以下结论:该方法通过对系统广义干扰(执行器故障、干扰以及模型不确定性)进行实时补偿,减小了切换增益,并以自适应模糊系统来逼近切换函数,柔化了输入信号,有效削弱了滑模系统的固有抖振现象,大大提高了控制精度,无论是对于执行器失效故障还是偏差故障,均具有较高鲁棒性,能够使系统在故障以后,仍然能够维持在理想的精度范围内,具有一定的工程实际意义。
[1] Gao Z, Ding S X, Cecati C. Real-time Fault Diagnosis and Fault-tolerant Control [J]. IEEE Transactions on Industrial Electronics, 2015, 62(6):3752-3756.
[2] 李文博,王大轶,刘成瑞. 动态系统实际故障可诊断性的量化评价研究[J]. 自动化学报, 2014, 41(3):497-507.(Li Wenbo, Wang Dayi, Liu Chengrui. Quantitative Evaluation of Actual Fault Diagnosability for Dynamic Systems [J]. Acta Automatica Sinica, 2014, 41(3):497-507.)
[3] 段文杰,王大轶,刘成瑞.卫星控制系统离散积分滑模容错控制[J].控制理论与应用,2015,32(2):133-141. (Duan Wenjie, Wang Dayi, Liu Chengrui. Discrete-Time Integral Sliding-Mode Fault-Tolerant Controller for Satellite Control System [J]. Control Theory and Applications, 2015, 32(2): 133-141.)
[4] 项昌毅,杨浩,程月华,姜斌,刘成瑞. 卫星姿态控制系统的可重构性指标分配[J]. 航天控制, 2014,32(2):46-52. (Xiang Changyi, Yang Hao, Cheng Yuehua,et al. Reconfigurable Allocation of Satellite Attitude Control System[J]. Aerospace Control, 2014, 32(2):46-52.)
[5] 王世新, 邢琰, 王大轶. 基于能耗最优的卫星姿控系统推力器可重构性设计[J]. 航天控制, 2015, 33(5):46-53. (Wang Shixin, Xing Yan, Wang Dayi, et al. Reconfigurability Design for Thrusters of Satellite Attitude Control System Based on Optimal Energy Consumption[J]. Aerospace Control, 2015, 33(5):46-53.)
[6] 徐赫屿, 王大轶, 李文博. 卫星姿态控制系统的可重构性量化评价方法研究[J]. 航天控制, 2016, 34(4):29-35. (Xu Heyu, Wang Dayi, Li Wenbo. A Reconfigurability Evaluation Method for Satellite Control System Based on Gramian Matrix [J]. Aerospace Control, 2016, 34(4):29-35.)
[7] Vadali S R. Variable-structure Control of Spacecraft Large-Angle Maneuvers [J]. Journal of Guidance, Control and Dynamics, 1986, 9(2): 235-239.
[8] Wang B Q, Gong K, Yang D, Li J F. Fine Attitude Control by Reaction Wheels using Variable-Structure Controller [J]. Acta Astronautica, 2003, 52: 613-618.
[9] Ding S H, Li S H. Sliding Mode Control of Spacecraft Attitude with Finite-Time Convergence [C]. Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China. 2006: 830-834.
[10] 管萍,陈家斌.挠性卫星的自适应模糊滑模控制[J]. 航天控制, 2004, 22(4) :62-67.( Guan Ping, Chen Jiabin. The Adaptive Fuzzy Sliding Mode Control for Flexible Satellite [J]. Aerospace Control, 2004, 22(4) : 62-67).
[11] Chenga C H, Shua S L, Chengb P J. Attitude Control of a Satellite Using Fuzzy Controllers [J]. Expert Systems with Applications, 2009, 36: 6613-6620.
[12] 王蜀泉,尹逊和,赵光恒.用于卫星姿态机动控制的一种自适应模糊控制器 [J].空间科学学报,2006,26(1):54-58.(Wang Shuquan, Yin Xunhe, Zhao Guanheng. An Adaptive Fuzzy Controller for Satellite Maneuver Control [J]. Chin. J. Space Sci., 2006, 26(1): 54-58.)
[13] Li J, Post M, Lee R.Real-Time Nonlinear Attitude Control System for Nanosatellite Applications [J].Journal of Guidance Control,and Dynamics,2013,36(6):1661-1671.
[14] 叶东, 屠园园, 孙兆伟. 面向非沿轨迹成像的切比雪夫神经网络滑模姿态控制[J]. 航空学报, 2015, 36(9):3092-3104. (Ye Dong, Tu Yuanyuan, Sun Zhaowei. High-Precision Attitude Tracking Control System for Next-generation Smart Imaging Satellite Using Chebyshev Neural Network[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9):3092-3104.)
AFaultTolerantControlSystembyUsingAdaptiveFuzzySlidingModeforSatelliteswithActuatorFaults
Tu Yuanyuan1, Wang Dayi2, Li Wenbo1
1. Beijing Institute of Control Engineering, Beijing 100190, China 2. Beijing Institute of Spacecraft System Engineering, Beijing 100094, China
Anadaptivefuzzyslidingmodecontroller(AFSMC)isdesignedforthesatelliteregardingtheactuatorfaults,disturbanceandmodeluncertaintyduringtheattitudetrackingprocess.Firstly,thetrackingerrordynamicandkinematicmodelsarebuiltbasedonquaternionerror,wheretheactuatorfaults,disturbanceandmodeluncertaintyarecombinedwithageneralinterference.Then,anonsingularandfastterminalslidingmodecontroller(NFTSMC)isderivedasthemaincontrollertoguaranteethesystemstabilityinlimitedtimeforavoidingthesingularity.Byconsideringthechatteringinherentinslidingmodestructure,anadaptivelawisintroducedtocompensatethegeneralinterferencewhichefficientlyweakensthechatteringbyreducingtheswitchgain.Inordertofurtherimprovetheprecisionofthesystem,anadaptivefuzzysystemisusedtoapproximatethesymbolicfunctionintheslidingmodecontrol.Finally,numericalsimulationsontheattitudetrackingcontrolofspacecraftinthepresenceofenvironmentaldisturbanceandparametersuncertaintiesareperformed,whoseresultsshowthesystemusingAFSMCcanstabilizewithin13-and
*国家杰出青年科学基金(6152530);国家自然科学基金(61690215, 61640304, 61573060, 61203093)
theprecisionofattitudeangleandangularvelocitycanbe0.001°and0.0008(°)/s,respectively.Inaddition,thismethodcanmeettherequirementsoffault-tolerancewithfasterconvergencespeedandbetterrobustnessbycomparingwiththeconventionalNFTSMC.
Attitudetracking;Slidingmodecontrol;Interferencecompensation;Adaptivefuzzy; Lyapunovstability

V467
A
1006-3242(2017)05-0051-07
2017-04-27
屠园园(1992-),女,江苏人,硕士研究生,主要研究方向为控制系统可重构性研究;王大轶(1973-),男,黑龙江人,博士,研究员,主要研究方向为航天器制导、导航与控制,卫星可重构性及可诊断性评价与设计;李文博(1984-),男,天津人,博士,高级工程师,主要研究方向为航天器可诊断、可重构性评价与设计。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
测控技术(2018年12期)2018-11-25 09:37:50
宇航计测技术(2018年3期)2018-09-08 02:21:36
制造技术与机床(2017年9期)2017-11-27 02:13:45
物联网技术(2017年7期)2017-07-20 14:09:05
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
纺织导报(2014年9期)2014-10-31 00:07:58
