
基于多因素输入模糊控制的再生制动策略
2017-11-20 21:17杨小龙杨功正张泽坪
湖南大学学报·自然科学版 2017年10期
杨小龙+杨功正+张泽坪
摘 要:大部分再生制动策略研究仅考虑制动方向稳定性,忽略制动效能恒定性,在理想制动前提下的研究存在缺陷.以良好制动性和能量回收率最大化为目标,对前驱型纯电动汽车进行研究,提出了基于多因素输入模糊控制的再生制动策略.在某整车模型的基础上,先以制动方向稳定性和ECE法规完成前、后轴制动力分配,同时保证前轴制动力最大化;再采用摩擦副动态摩擦因数预估机械制动效能因数,然后将电池荷电状态、制动强度和预估的机械制动效能因数引入模糊控制器,得到再生制动力分配份额,完成能量回收.研究结果表明:在频繁且强度较恒定的制动工况下,制动效能恒定性表现较好,同时制动能量回收率提升了18.5%;城市道路工况蓄电池满电到零电的整个测试中,能量回收率提升了5.3%.
关键词:再生制动; 制动性;模糊控制;预估;制动效能因数
中图分类号:U461.3 文献标志码:A
Regenerative Braking Strategy Research Based onMulti-factor Input Fuzzy Control
YANG Xiaolong,YANG Gongzheng,ZHANG Zeping
(State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hunan University,Changsha 410082,China)
Abstract:Most of the regenerative braking strategies only considered the stability on the braking direction and ignored the braking efficiency constancy,thus these researches may have defect under the ideal braking condition. A front driving electric vehicle was studied with the object to obtaining good braking and maximizing energy recovery rate. A regenerative braking strategy based on the multi-factor input fuzzy control was also proposed. Using the passage vehicle model,the front and rear axle braking force distribution was first set up according to the braking stability and ECE regulations. The front axle braking force was tried to be kept at the maximum at the same time. Second,the dynamic friction coefficient was used to predict the mechanical braking performance factor. Third,the battery state of charge,the braking strength and the estimated mechanical brake efficiency factor were introduced to the fuzzy controller. Finally,the distribution of regenerative braking force was obtained,and thus energy recovery was finished. The results show that with the new method,the braking performance constancy is improved in the frequent and constant intensity braking conditions. The braking energy recovery rate is increased by 18.5%. In the urban road condition with battery full power to zero,the energy recovery rate is increased by 5.3%.
Key words:regenerative braking; braking performance; fuzzy control; predict; braking efficiency factor
当今,节能环保是时代的主题.新能源汽車伴随着这个主题而生.在众多先进技术中,再生制动已成为大部分车企实现节能的重要手段[1],是提升续航里程的关键技术[2].纯电动汽车作为新能源汽车的一种,因为单纯靠电机驱动,相对其它汽车,会配备更大功率的电机.这是应用制动能量回收技术的一大优势,再生制动可提供更大的制动力矩,能量回收潜力也更突出[3].
关于再生制动的研究,由于影响因子偏多,系统复杂,控制精度要求高[4],合适的解决方案仍在不断探索.初亮等[5]从车速和制动强度两方面,并考虑电制动故障情况,设计再生制动策略,但并未考虑机械制动效能减弱或消失的情况;姜雪、张亚军等[6-7]将锂电池荷电状态SOC和制动强度引入模糊控制器,完成制动力分配,仅以提高能量回收率为目标,忽略机械制动效能衰减问题;Cao和陈赞等[8-9]采用制动强度或总需求制动力、车速和蓄电池SOC进行模糊控制,完成反馈制动,其研究主要集中在模糊输入参数分析,未涉及制动效能恒定性分析;Maia等[10]以汽车加速度、加速度变化率和道路坡度为输入设计模糊逻辑模型,在忽略制动控制策略的情况下推导出再生制动因子.众多研究中,大部分学者均假设制动器摩擦副摩擦性能不变,其摩擦因数为一定值[11],即假设制动器的制动效能恒定.而大量的交通事故数据统计以及相关的试验和计算表明,制动器的制动效能并不是恒定不变的.由此可知,再生制动的策略研究如果仅考虑制动方向稳定性,忽略制动效能恒定性,在理想条件下进行研究存在一定缺陷.良好的制动性可以保证车辆行驶安全,是再生制动研究必须首先考虑的.本文的研究,除考虑制动强度和蓄电池SOC外,通过制动器动态摩擦因数预估机械制动效能因数,得到基于多因素输入模糊控制的再生制动策略.基于此策略,搭建仿真模型,完成最终优化目标.endprint
1 制动力分配
1.1 再生制动原理
再生制动系统相对于车辆起步或加速时,蓄电池输出电能,使电机带动车轮转动,该系统工作时将一部分汽车惯性势能通过发电机发电转化为化学能储存到蓄电池中,同时发挥制动作用[12].
由上可知,再生制动只发生在驱动轮上.对于两驱型的纯电动汽车,制动时由于车辆的惯性作用,大量的载荷前倾作用于前轴,可以瞬间提升前轴的最大制动力,故前驱型电动汽车比后驱型更有利于制动能量的回收.为了尽可能提高能量回收率,在模型选择时,本文应用了前驱的车型.
1.2 制动力分配策略
本文再生制动的研究,首先以Advisor2002整车模型进行对标分析.原模型在缺省前、后轴制动力分配的条件下,通过实时采集车速信息,进行车速-制动分配系数二维查表,从而完成电、液制动力分配和能量回收.部分学者在原模型的基础上,以制动强度和蓄电池SOC为输入,进行双入双出模糊控制,得到再生制动比例和前轮摩擦制动比例[7],如图1所示.车速查表和双入双出模糊控制中均未进行前、后轴制动力划分,不能保证制动方向稳定性和ECE法规的要求.此外,以上两种策略均未考虑制动时,整个系统的效能是否保持不变,无法保证车辆行驶中良好的制动性.
若根据车辆行驶工况,保证良好制动性且兼顾制动能量回收率最大化,需对制动力分配进行精确控制.图2所示为改进后的控制策略.
1.3 前、后轴制动力分配
制动过程中,伴随一定概率的汽车方向稳定性丧失风险,如转向失控、汽车循迹性变差、制动跑偏和甩尾等问题.然而,前、后轴制动力依次以某些规律划分,可以很大程度地降低此风险.前、后轴制动力划分的基本方向是尽量向理想制动力分配曲线(I曲线,如公式(1)所示)靠拢,提高制动效率.同时,需遵循ECE制动法规的相关要求[13].
Fxb2=12Ghgb2+4hgLGFxb1-Gbhg+2Fxb1(1)
式中:Fxb1,Fxb2,G,hg,L,b分别表示前、后轴地面制动力(N),整车重力(N),整车质心距水平地面高度(m),轴距(m),质心到后轴中心线的长度(m).I曲线仅为前、后轴制动力划分的参考依据,如果简单采用此线划分制动力,在雪地、冰面等偏光滑的道路行驶时,汽车轮子容易锁死,制动能量无法回收[14].
ECE制动法规规定:当φ∈[0.2,0.8]时,z≥0.1+0.85(φ-0.2).其中,φ为路面附着系数,z表示制动强度.此规定是各种类型汽车均应该达到的标准.它确保前轮在发生锁死的情况下,后轮制动力不致过小,且会受到最低极限的制约,从而保证安全减速或停车.这条制约的界限为最小后轮制动力分配曲线,也叫M曲线.M曲线由式(2)和式(3)得出.
Fxb1+Fxb2=Gz(2)
Fxb1=z+0.07G(b+zhg)0.85L(3)
高速特殊工况需立即减速或停车时,制动强度z一般超过0.7.为避免发生行车危险,使车子快速停下来,需要整车达到最大的减速度且制动效率最高,此时选择I曲线是最佳的分配方案.M曲线过渡到I曲线,为防止前轮抱死,制动力分配沿路面附着系数φ为0.7的f线上升,此曲线由式(4)得到.
Fxb2=L-φhgφhgFxb1-Gbhg(4)
对于前驱型純电动汽车,前轴制动力满足下式:
Fxb1=Ffr1+Freg(5)
式中Ffr1,Freg分别为前轴摩擦制动力、再生制动力.为了尽可能减少制动中的能量损失,实现更高的能量回收率,应要求再生制动力所占份额尽量在有限的范围内处于最高值.同时,最大再生制动力受到电机发电功率和蓄电池充电功率的限制,为简化计算,模型中选用电机和蓄电池均满足最大功率需求.表1所示为本次所研究车型的相关参数.
综上所述,图3中阴影部分所示为前、后轴制动力的取值可以分布的区域.该区域的分配方案以满足制动方向稳定性和ECE法规的要求为原则,本文所采用分配曲线沿图中的ABCDE曲线.沿ABCD曲线分配,可实现在不同制动强度下,前轴制动力达到最大化,从而可以提供更大的再生制动力供发电机发电,实现制动能量回收率最大化.此外,DE段仅在紧急制动时发挥作用.
ABCDE曲线中,B点为M曲线与横轴的交点.由公式(2)(3)和条件Fxb2=0,可得到方程式(6).
Fxb1=Gz=z+0.07G(b+zhg)0.85L(6)
解得z1=0.215.C点为M曲线与路面附着系数φ=0.7的f线的交点.由公式(2)(3)和(4)联立,可得到方程式(7).
Fxb1=φGbL+GzhgL
=z+0.07G(b+zhg)0.85L(7)
解得z2=0.525.
在制动强度z节点计算分析清晰的情况下,对前、后轴制动力进行了更详细的划分.具体策略如下:
1)当0≤z≤0.215时,前、后轴制动力沿AB线划分.
2)当0.215≤z≤0.525时,沿M曲线的BC段分配前、后轴制动力.
3)当0.525≤z≤0.7时,前、后轴所受力沿CD段路面附着系数φ为0.7的f曲线划分.
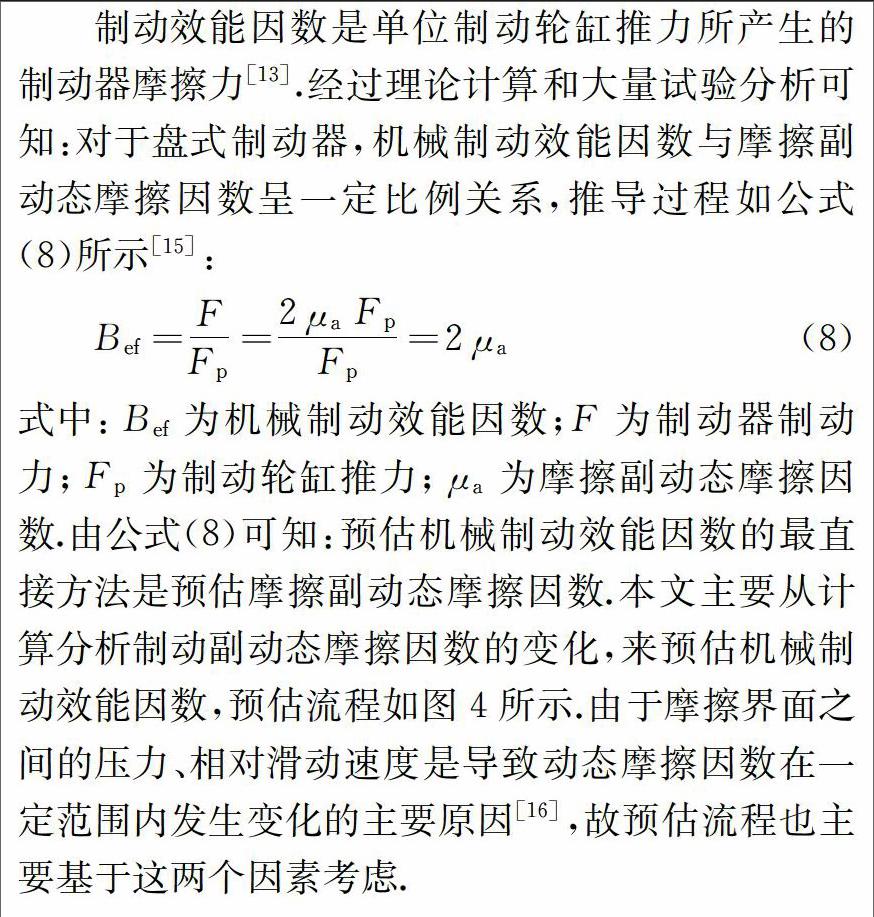
4)当0.7 2 再生制动模糊控制 2.1 预估机械制动效能因数 制动效能因数是单位制动轮缸推力所产生的制动器摩擦力[13].经过理论计算和大量试验分析可知:对于盘式制动器,机械制动效能因数与摩擦副动态摩擦因数呈一定比例关系,推导过程如公式(8)所示[15]: Bef=FFp=2μaFpFp=2μa(8)
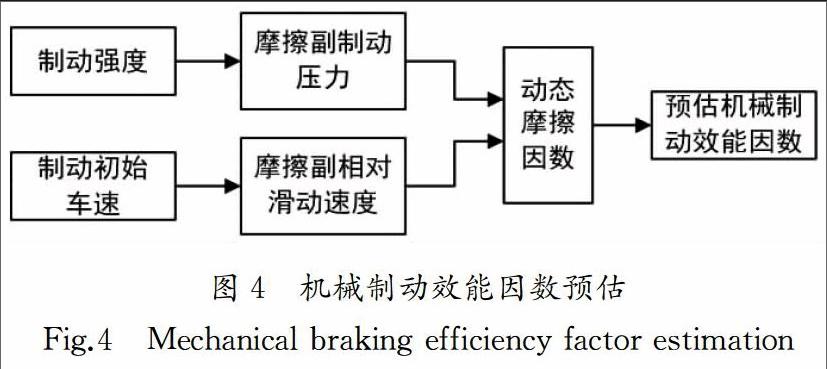
式中:Bef为机械制动效能因数;F为制动器制动力;Fp为制动轮缸推力;μa为摩擦副动态摩擦因数.由公式(8)可知:预估机械制动效能因数的最直接方法是预估摩擦副动态摩擦因数.本文主要从计算分析制动副动态摩擦因数的变化,来预估机械制动效能因数,预估流程如图4所示.由于摩擦界面之间的压力、相对滑动速度是导致动态摩擦因数在一定范围内发生变化的主要原因[16],故预估流程也主要基于这两个因素考虑.
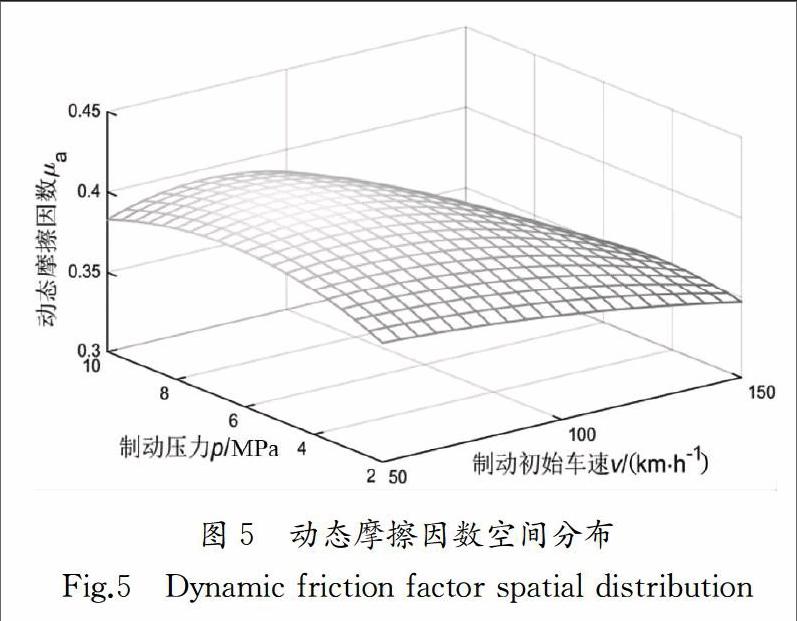
在预估模型中,摩擦副制动压力通过计算的制动强度采用二维查表法得到,相对滑动速度可以通过制动初始车速计算得到.为简化计算,计算动态摩擦因数时,直接以制动初始车速来代替摩擦副相对滑动速度.根据试验分析[17],由测试数据进行二次回归,得到惯性制动动态摩擦因数μa关于制动压力p和制动初始车速v的表达式,如式(9)所示.图5所示为动态摩擦因数的空间分布,更加清晰地显示了相关参数的变化规律.
μa=0.368-0.450×10-3v+0.136×10-5v2+0.556×10-2p-0.116×10-2p2+0.267×10-3vp-0.157×10-5v2p(9)
2.2 模糊控制器
2.2.1 隶属度函数设计
预估模型完成机械制动效能因数的预估后,需要将此值引入模糊控制器,完成整套再生制动策略的开发,故模糊控制器的研究也至关重要.基于多因素输入实现更精确模糊控制的考虑,本文设计的模糊控制器设置了三个输入端和一个输出端:输入端依次为制动强度z、蓄电池荷电状态SOC和预估机械制动效能因数Bef,输出端为再生制动力的分配系数α.三个输入参数为制动安全、能量回收的关键影响因素,其值域分布、组合关系和模糊规则,直接决定着本文所设计控制策略的優劣.
1)制动强度z
行车记录的大数据表明,绝大部分驾驶情况下,行车制动的强度不超过0.3.结合具体的前、后轴制动力分配策略,采用梯形函数,将制动强度z划分为4个子集{S(小),MS(较小),MB(较大),B(大)},如图6所示.
2)蓄电池SOC
蓄电池充、放电时,需要使用智能监控设备实时对SOC值进行估算,并将此值反馈到控制器.如果监控设备故障,蓄电池使用时发生SOC值过高或过低,都会对其造成不同程度的损坏.研究表明,当蓄电池SOC低于10%或高于90%时,为保证充电安全,不适合进行充电[8],故SOC值在一定范围内才能进行制动能量回收.综上考虑,蓄电池荷电状态SOC划分出3个子集{L(低),M(中),H(高)},具体分布情况如图7所示.
3)预估机械制动效能因数Bef
根据上文得到的动态摩擦因数分布图及公式(8),预估机械制动效能因数范围确定为[0.5,1],并划分为3个模糊子集{L(低),M(中),H(高)},如图8所示.
4)再生制动力分配系数α
α取值区间为[0,1],采用梯形和三角形隶属度函数,划分为5个模糊子集{NB(负大),NS(负小),ZO(零),PS(正小),PB(正大)},如图9所示.
2.2.2 模糊规则设计
通过大量的试验和仿真数据,并结合专家经验和预估机械制动效能因数Bef,对双入双出模糊控制规则进行了改进,得到能够兼顾制动性和制动能量回收率最大化的模糊控制规则,表2所示为其中部分模糊规则[18].
3 仿真试验及结果分析
可进行能量回收的车型,其制动性一般以制动距离和能量回收率2个指标评价[19].制动距离在最大减速度下测得,仅由机械制动,未涉及再生制动,故未使用制动距离作为评价指标.基于对车辆制动能量流的分析[20],本文研究时以制动效能恒定性和能量回收率为两个重要指标,完成仿真结果分析.
选用制动频繁、制动强度较恒定且符合实际用车情况的主干道循环行驶工况(CYC_ARTERIAL)进行仿真,该工况如图10所示.其次,对于主要行驶在城市工况的纯电动汽车,为测试改进后策略在城市行驶工况下的制动能量回收率,选用了CYC_UDDS城市道路循环工况,具体工况如图11所示.
此工况下,考虑纯电动汽车蓄电池SOC大部分时间处于20%~80%区间,SOC初始值设置为0.5.车轮实际转矩为负值时,表示行车制动,其大小等于机电制动之和,其波动情况可以反映制动效能恒定性.由图12可知,频繁制动且制动强度较恒定的工况下,改进后策略制动时,车轮实际负转矩在峰值附近的波动情况相比另外两种策略要小.这表明,改进后的系统可维持相对稳定行车减速度的性能更强,即整车制动效能恒定性更好.双入双出模糊控制和Advisor2002策略均未考虑刹车盘效能恒定性问题,无法根据效能因数变化实时调控,所以机电制动的匹配能力较弱,能量回收率表现较差.由图13和表3可知,改进后策略的能量回收率相比双入双出模糊控制和Advisor2002策略,分别提升了185%和26.4%.
城市道路工况的测试,在目前人们日常用车的情况下,显得尤为重要.该工况主要测试了纯电动汽车从满电到零电整个过程中的能量回收率,图14和表4所示为本次对比测试的结果.
由图14可知,蓄电池SOC从1降为0的整个过程中,改进后策略在制动能量回收方面均占有一定优势,曲线下降更加平缓.Advisor2002策略因为没有考虑蓄电池SOC,在SOC值偏大时,再生制动比例仍然可以随车速的增加而变大,制动能量回收表现较好.但随着SOC值的下降,改进后策略和双入双出模糊控制,能够根据制动强度z和SOC值变化进行调控,可以得到相对更合理的再生制动比例,且能量总传递效率更高,故蓄电池电量消耗更慢.此外,根据预估机械制动效能因数,动态调整前轴再生制动和摩擦制动比例的改进后策略,可根据机械制动效能的衰减情况,完成更好的机电制动比例匹配,故能量回收率在三个对比测试对象中最高.相较于双入双出模糊控制,改进后策略在相同测试环境中制动能量回收率提升了5.3%,且续航里程增加了1.5 km.endprint
4 结 论
以良好制动性和能量回收率最大化为目标,经确定研究对象、综合推导分析提出了基于多因素输入模糊控制的再生制动策略.经过仿真验证,得到以下结论:
1)前、后轴制动力更加精细的划分,保证了制动方向稳定性和前轴制动力更高配比,为前驱型测试车的再生制动力取得更高值创造了条件.
2)预估机械制动效能因数引入模糊控制,确保前轴摩擦制动力与再生制动力根据机械制动效能衰减情况进行合理分配.与对比测试方案相比,在很大程度上改善了整个制动系统的效能恒定性问题,提升了能量回收率.
3)改进后的整车模型相比双入双出模糊控制模型和Advisor2002模型,更接近于实际用车情况,可为进一步研究实车再生制動技术提供参考.
参考文献
[1] EHSANI M,GAO Y,EMADI A.Modern electric,hybrid electric,and fuel cell vehicles: fundamentals,theory,and design[M].CRC Press,2009.
[2] 袁希文,文桂林,周兵.分布式电驱动汽车AFS与电液复合制动集成控制[J].湖南大学学报:自然科学版,2016,43(2):28-35.
YUAN Xiwen,WEN Guilin,ZHOU Bing.Integrated control of active front steering and motor/hydraulic hybrid braking in distributed electric drive vehicles[J].Journal of Hunan University: Natural Sciences,2016,43(2):28-35.(In Chinese)
[3] HANO S,HAKIAI M.New challenges for brake and modul-ation systems in hybrid electric vehicles (HEVs) and electric vehicles (EVs) [J].SAE Technical Paper,No.2011-39-7210.
[4] 肖博一,曾细强,张震邦,等.纯电动汽车再生制动策略现状与展望[J].汽车电器,2016(12):1-6.
XIAO Boyi,ZENG Xiqiang,ZHANG Zhenbang, et al.Present status and prospect of the regenerative braking control strategies of electric automobiles [J].Automotive Appliances,2016(12):1-6.(In Chinese)
[5] 初亮,何强,富子丞,等.纯电动汽车再生制动控制策略研究[J].汽车工程学报,2016,6(4):244-251.
CHU Liang,HE Qiang,FU Zicheng,et al.Brake energy recovery control strategy for pure electric vehicles[J].Chinese Journal of Automotive Engineering,2016,6(4):244-251.(In Chinese)
[6] 姜雪,胡荣强,赵武.基于模糊控制的电动汽车复合制动力分配策略[J].仪表技术,2010(8):9-13.
JIANG Xue,HU Rongqiang,ZHAO Wu.Control strategy of compound braking force distribution for electric vehicle based on fuzzy logic control[J].Instrumentation Technology,2010(8):9-13.(In Chinese)
[7] 张亚军,杨盼盼.纯电动汽车再生制动系统的建模与仿真[J].武汉理工大学学报,2010,32(15):90-94.
ZHANG Yajun,YANG Panpan.Modeling and simulation of regenerative braking system for pure electric vehicle[J].Journal of Wuhan University of Technology,2010,32(15):90-94.(In Chinese)
[8] CAO X,ISHIKAWA T.Optimum design of a regenerative braking system for electric vehicles based on fuzzy control strategy[J].IEEJ Transactions on Electrical and Electronic Engineering,2016,11(S1): 186-187.
[9] 陈赞,谭光兴,林聪,等.基于模糊算法的纯电动汽车制动能量回收[J].广西科技大学学报,2014,25(3):32-42.
CHEN Zan,TAN Guangxing,LIN Cong, et al.Pure electric vehicle braking energy recovery based on fuzzy algorithm[J].Journal of Guangxi University of Science and Technology,2014,25(3):32-42.(In Chinese)endprint
[10]MAIA R,SILVA M,ARAU′JO R,et al.Electrical vehicle modeling: A fuzzy logic model for regenerative braking[J].Expert Systems with Applications,2015,42(22): 8504-8519.
[11]趙凯辉.汽车制动器热衰退性能及相关制动安全检测研究[D].西安:长安大学,2010:25-26.
ZHAO Kaihui.Study on the brakes heat-fade performance and corresponding braking safety detection of vehicle[D].Xian: Changan University,2010:25-26.(In Chinese)
[12]赵国柱.电动汽车再生制动若干关键问题研究[D].南京:南京航空航天大学,2012.
ZHAO Guozhu.Several key problems in research of electric vehicle regenerative braking[D].Nanjing: Nanjing University of Aeronautics and Astronautics,2012.(In Chinese)
[13]余志生.汽车理论[M].北京:机械工业出版社,2009:108-118.
YU Zhisheng.Automobile theory[M].Beijing: China Machine Press,2009: 108-118.(In Chinese)
[14]KO J W,KO S Y,KIM I S,et al.Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock[J].International Journal of Automotive Technology,2014,15(2): 253-262.
[15]唐平.轿车制动系统的设计与优化[D].成都:西华大学,2012.
TANG Pin.Design and optimization of braking system based on a car[D].Chengdu: Xihua University,2012.(In Chinese)
[16]张剑,夏长高.盘式制动器瞬态温度场与摩擦因数分析[J].机械设计与制造,2014(2):119-121.
ZHANG Jian,XIA Changgao.Analysis of the transient temperature field and friction factor on disc brakes[J].Machinery Design & Manufacture,2014(2):119-121.(In Chinese)
[17]王仁广,李志远,张彪,等.盘式制动器平均摩擦系数的试验研究[J].实验技术与管理,2010,27(1):29-39.
WANG Renguang,LI Zhiyuan,ZHANG Biao,et al.Experimental research on average friction coefficient of disk brake[J].Experimental Technology and Management,2010,27(1):29-39.(In Chinese)
[18]ZHENG H,CHEN Y,ZONG C.Braking stability control algorithm for vehicle based on fuzzy logic[C]//Proceedings of the FISITA 2012 World Automotive Congress.Springer Berlin Heidelberg,2013: 73-82.
[19]何莉萍,李庆锋,丁舟波,等.基于模糊神经网络控制的汽车辅助再生制动系统研究[J].湖南大学学报:自然科学版,2014,41(10):35-41.
HE Liping,LI Qingfeng,DING Zhoubo,et al.Research on the vehicle assist regenerative braking system based on the fuzzy neural network[J].Journal of Hunan University: Natural Sciences,2014,41(10):35-41.(In Chinese)
[20]QIU C,WANG G.New evaluation methodology of regenerative braking contribution to energy efficiency improvement of electric vehicles[J].Energy Conversion and Management,2016,119: 389-398.endprint
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学与财富(2016年26期)2016-12-01
现代电子技术(2009年13期)2009-08-31
