2017款路虎新发现网络拓扑图及图注
2017-11-18 06:02:00
汽车维修技师 2017年6期
2017款路虎新发现网络拓扑图及图注
一、2017款路虎新发现网络拓扑图
2017款路虎新发现修改了车辆的通信网络。中速CAN 被替换为高速多CAN 网络结构。还配备了超高速FlexRay通信通道。网络拓扑图见图1和表所示,网络按如下划分:
1.车身高速HS CAN:所有模块均采用了高速版本以提高带宽,从而为全新的车身功能提供支持。
2.底盘高速HS CAN:包含了提供底盘/车辆动力以及驾驶员辅助系统和安全功能的所有模块。
3.舒适高速HS CAN:为舒适度和控制、信息娱乐以及驾驶员信息功能提供支持的主通信功能。
4. 电源模式0 高速网络H S CAN:这是一套电源管理网络,可在车辆钥匙处于关闭位置时为需要通信的车辆交互功能提供支持(电源模式0 通信)。
5.动力传动系统高速HS CAN:支持通过先前的网络架构设计为无法迁移到FlexRay网络的模块提供通信。
6.FlexRay:全新的总线布局,动力传动系统已从先前的PT-CAN 网络进行迁移,以便提高通信能力。
每个网络包含一个双绞线,以形成并联电路,为清晰和易用起见,拓扑上只显示了一个导线。CAN网络每个网络有两个120Ω的端接电阻器。电阻器的位置可在拓扑图上找到,由位于相应控制模块上的欧姆符号(Ω) 表示。拓扑图可以协助或识别网络故障。
二、FlexRay
2017款路虎新发现的通信网络是捷豹路虎车系首款采用FlexRayTM通信协议的Land Rover 产品。FlexRayTM是一套串行通信系统,适合在管理安全关键型车辆系统的模块之间交换数据。它提供了可容错的实时通信通道,其工作速度高达10Mb/s。如图2所示网络包含三个分支,每个分支均使用一对扭结电线构建,每个分支的末端均配有一个终端电阻器,这些电阻器按串联方式连接。执行电阻检查之前,必须隔离每个终端电阻器对。因分动器模块是中间连接方式,其内部有2个串联的1.3kΩ电阻,其他模块包含两个以串联方式连接的47 Ω电阻器。
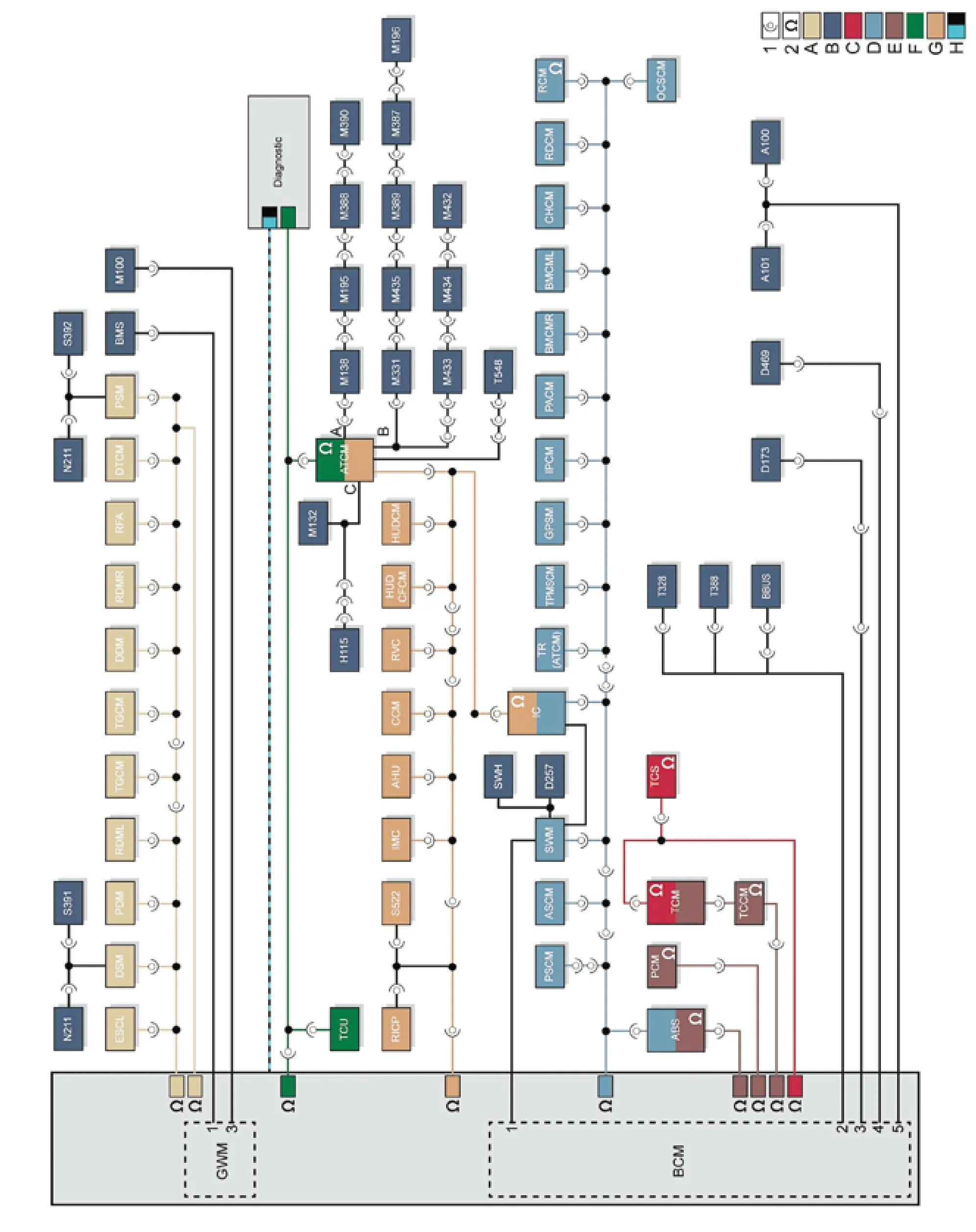
图1 2017款路虎新发现网络拓扑图
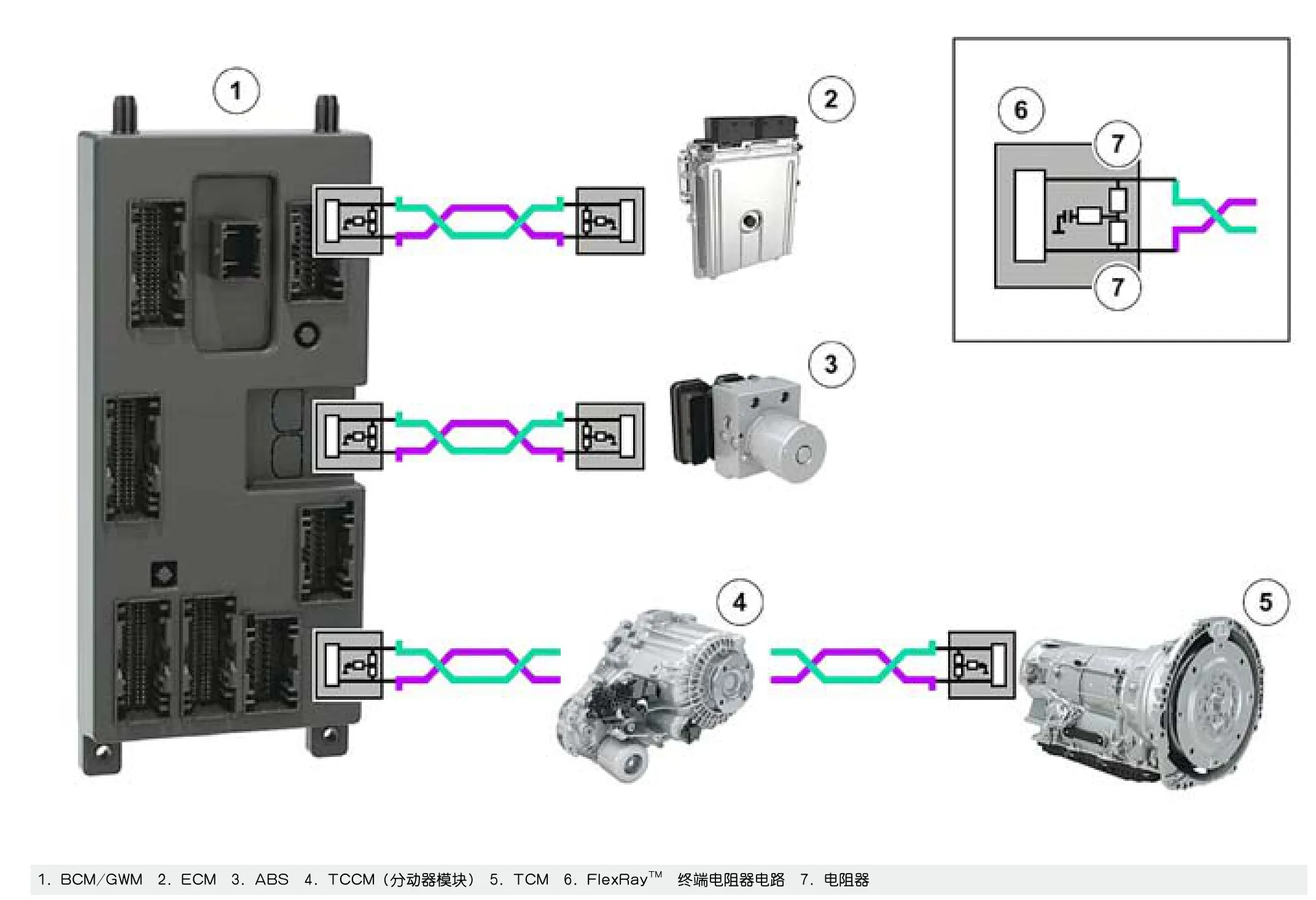
图2 FlexRay网络拓扑图

2017款路虎新发现网络拓扑图说明

续表
猜你喜欢
电子设计工程(2023年2期)2023-01-24 12:52:12
数学年刊A辑(中文版)(2022年1期)2022-08-20 08:50:22
网络安全与数据管理(2022年2期)2022-05-23 13:25:46
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
传感器世界(2019年8期)2019-10-28 01:08:02
电子制作(2018年23期)2018-12-26 01:01:16
电子世界(2018年20期)2018-11-14 10:43:54
电子产品可靠性与环境试验(2017年3期)2017-07-10 12:22:49
汽车维修技师(2017年10期)2017-03-17 02:25:01
电测与仪表(2016年5期)2016-04-22 01:13:46