微小型电动垂直起降无人机总体设计方法及特殊参数影响
2017-11-17 09:05唐伟宋笔锋曹煜杨文青
航空学报 2017年10期
唐伟,宋笔锋,曹煜,杨文青
西北工业大学 航空学院,西安 710072
微小型电动垂直起降无人机总体设计方法及特殊参数影响
唐伟*,宋笔锋,曹煜,杨文青
西北工业大学 航空学院,西安 710072
针对微小型电动垂直起降无人机(VTOL mEUAV),分析其设计难点,通过理论分析提出了一种基于特殊参数的总体设计方法,并基于算例进行了特殊参数的计算和影响分析。从翼载荷的选择、起飞总重迭代估计、无人机的平衡与操纵分析和飞翼布局设计方面详细阐述总体设计方法的过程,并针对特殊设计的一套动力系统X型飞翼尾坐式垂直起降无人机,进行功重比、动力系统工作点特性匹配及动力系统安装角等特殊参数的选择和影响分析,最终基于设计结果进行原理样机制作与飞行试验,证明了设计方法的有效性。研究结果表明,不同设计目标会引起翼载荷的选择和功重比的变化,螺旋桨与电机的匹配特性极大地影响动力系统效率与能源选择,合理选择动力系统的安装角与偏转方向可在基本不影响整体性能的情况下有效地改善操纵特性。
垂直起降无人机;总体设计方法;X型飞翼;功重比;动力系统匹配工作点;安装角;偏航操纵改善
伴随着能源技术、微电子技术、传感器技术等的迅猛发展,凭借同时具有的无需跑道和广阔空域的垂直起降(VTOL)能力与高效快速巡航的能力,微小型垂直起降固定翼无人机(UAV)迅速在无人机领域中占据一席之地。通过搭载不同的任务载荷,微小型垂直起降固定翼无人机能在军事和民用领域完成多种常规无人机无法完成的任务[1-2]。微小型垂直起降固定翼无人机通常装配响应快速、调节简单的无刷电机和高能量密度锂聚合物电池,结构紧凑,可靠性高,并且同时兼顾快速高效巡航和稳定悬停垂直起降,起降方式灵活,飞行效率高。
微小型电动垂直起降无人机(miniature Electric-powered Vertical Take-Off and Landing Unmanned Airial Vehicle,VTOL mEUAV)的布局通常有推力矢量、倾转机翼、倾转旋翼、固定翼与旋翼复合式和尾坐式等。目前市场上的电动垂直起降无人机主要以固定翼与旋翼复合式为主,如美国的Arcturus JUMP15、成都纵横自动化有限公司的“大鹏”等,其技术难度相对较低。倾转旋翼与倾转机翼类通常具有较重、较复杂的倾转机构,并对动力系统的个数与倾转控制有较高要求;尾坐式垂直起降方式结构简单,无需多余的支撑机构,易与飞翼布局复合,但设计难度较高,作为研究领域对象的居多。
目前,由于微小型电动垂直起降技术研究时间较短,国内外基本停留在研究阶段,国内外系统的资料较少,并且此构型相比单一的常规无人机难度更大,使得该种无人机的设计困难重重。因此,本文的研究主要针对VTOL mEUAV展开,通过传统的总体设计方法进行引申修改,结合VTOL mEUAV的独有特点和设计参数,并以相对复杂、难度更高的尾坐式形式,分析设计难点,提出了一种基于特殊设计参数的总体参数设计方法,并以一种新型的X型飞翼布局尾坐式垂直起降无人机的设计作为算例,分析特殊设计参数的选择及其影响。由于电机功率限制与能源能量密度限制,起飞总重较大时通常采用油机作为动力系统,因此,本文提出的设计方法主要针对单个动力系统负载低于5 kg的VTOL mEUAV。
1 VTOL mEUAV设计难点
垂直起降无人机的发展对工程设计提出了大量的高难度挑战。Raymer将总体设计阶段的难点总结为动力系统的推力匹配和无人机的平衡[3]。Hogee进一步说明了飞行器布局选择时所面临的挑战[2]。因此,在总体设计阶段,VTOL mEUAV的设计难点主要体现在推力匹配和无人机平衡与操纵,而无人机模式转换过程的难点则在详细设计阶段比较突出。
1.1 动力系统推力匹配
对于VTOL mEUAV,尤其是尾坐式布局,动力系统需要同时满足垂直起降过程和巡航过程中的动力需求。在垂直起降过程中,推力需求受重力约束,动力系统的推重比须大于1,并留有足够的余量以保证无人机的操纵性和安全性;在巡航过程中,推力需求主要受升阻比约束,而常规升阻比一般在5~20之间,此时动力系统的推重比最小值处于0.05~0.2之间。基于VTOL mEUAV通常采用的螺旋桨-无刷电机动力系统,以上得到的悬殊推重比差距将带来显著的问题。首先,VTOL mEUAV推重比大于1,意味着比常规无人机更大的功率需求和更重的动力系统;其次,动力系统较难同时在2种状态下获得最高的效率,甚至无法同时满足2个设计点的动力需求或速度需求;再者,无人机有效载荷的承载能力将受到极大的限制。
1.2 无人机的平衡与操纵
无论选择何种无人机布局形式,VTOL mEUAV均需在垂直和水平飞行过程中达到平衡状态。在垂直状态,推力的合力需通过无人机的重心。如果有翼面和舵面浸在螺旋桨滑流中,还需要保证机体的力矩平衡与升力平衡。在水平状态,配平方式与常规无人机类似,但同样受到螺旋桨滑流的影响,需计入滑流参数项,使得无人机的平衡设计更加复杂。
由于螺旋桨滑流的存在,滑流通过改变螺旋桨轴线两侧机翼部分的实际迎角引起升力变化,产生较大的滚转力矩,与螺旋桨产生的反扭力矩反向,对垂直状态下的平衡与操纵控制有很大的影响[4-5]。此外,由于机翼面积较大,转动阻尼系数通常较高。因此,垂直状态下旋翼操纵力矩不足的操纵缺陷显著。
综上所述,对于VTOL mEUAV,其设计难点都与动力系统直接相关,动力系统的选择直接影响着设计结果的可行性,以及无人机的气动特性与操纵特性。因此,基于动力系统开展的总体设计方法尤为必要。
2 VTOL mEUAV总体设计思路、算例及方案
2.1 总体设计思路
无人机的总体参数设计主要围绕其典型任务剖面进行[4]。与常规无人机不同,具有垂直起降能力的微小型固定翼无人机具有其独特的任务剖面[6],如图1所示,其典型任务主要包括垂直起飞、垂直模式与巡航模式的过渡转换,水平巡航、定常爬升、悬停或盘旋作业、返航和垂直降落。

图1 垂直起降固定翼无人机的典型任务剖面Fig.1 Typical flight profile of flying-wing VTOL UAV
根据无人机的任务剖面,将提出总体设计要求,主要包括无人机的有效载荷重量WPL、巡航速度V和巡航时间t等。
针对VTOL mEUAV,本文提出的总体设计思路如图2所示,并将基于算例分析该总体设计方法。

注:S为机翼的参考面积;W/S为翼载荷;P/W为功重比。图2 微小型电动垂直起降无人机总体设计思路Fig.2 Preliminary design procedure of VTOL mEUAV
2.2 算例设计目标
起飞重量不超过3 kg,有效载荷重量为500 g,巡航速度为15 m/s,爬升角度为5°,盘旋过载为1.7,采用垂直起降方式在指定位置起降。续航时间为15 min,其中包括4 min悬停(含起降)、7 min 巡航、3 min盘旋、1 min爬升。
2.3 总体设计方案
与倾转旋翼、倾转机翼类相比,尾坐式垂直起降方式结构简单,无需复杂繁重的传动机构,并可与飞翼布局有效复合;与简单固定翼旋翼复合布局相比,其仅采用4组螺旋桨-电机组成的一套动力系统同时完成起降和巡航过程,无冗余重量,结构效率较高。X型飞翼布局形式气动效率高,在有效展长下升力面积更大,与尾坐式形式合理匹配,不需要多余的支撑机构[7]。此外,通过反转螺旋桨的对称布置,可解决滑流带来的气动滚转现象。因此本文采取4组螺旋桨-电机系统组成一套动力系统,安装在X型飞翼的前缘,通过机翼与大容量机身固接,作为尾坐式垂直起降和巡航的布局形式,如图3所示。

图3 X型飞翼VTOL mEUAV布局Fig.3 Configuration of X-type flying-wing VTOL mEUAV
3 总体设计方法
3.1 翼载荷与功重比估计
无人机的功重比与翼载荷之间的约束关系主要是针对常规无人机而言的,基于巡航、爬升、盘旋、失速以及手抛或滑降起降方式等环节的性能要求,综合权衡选择无人机的翼载荷,并获得此时的功重比。对于VTOL mEUAV,无人机的功重比直接关系到其动力系统和能源系统的选择。因此,在无人机的初始设计阶段,功重比和翼载荷的选择对无人机重量、尺寸、气动特性以及无人机的性能起着决定性作用[8]。
根据整个任务剖面内无人机受力形式的区别,VTOL mEUAV的飞行过程主要分为垂直飞行阶段和水平飞行阶段,其中水平飞行阶段包括定常巡航、定常爬升、稳定盘旋的过程。
无人机在水平飞行时,飞行阻力D可表示为
D=qSCD
(1)
(2)
(3)
式中:q为飞行动压;CD为阻力系数;CD0为无人机的零升阻力系数;CL为升力系数;k为诱导阻力因子;e为奥斯瓦尔德数;AR为机翼展弦比。
升力可表示为
L=nWTOg
(4)
式中:n为无人机过载系数,巡航过程和定常爬升过程中取1;g为重力加速度。
对水平飞行阶段的无人机进行受力分析,可得无人机完成目标动作所需的推力为
T=D+WTOgsinφ
(5)
式中:φ为定常爬升角度,巡航过程和稳定盘旋过程中取0°。
动力系统输出功率为
PP=TV
(6)
电池输出功率为
PB=PP/(ηPηMηESC)
(7)
式中:ηP、ηM和ηESC分别为螺旋桨、无刷电机和无刷电调的工作效率;基于文献数据[9-11],为了更好地保证设计可行性,通常将无刷电机的效率取为70%左右,螺旋桨的效率取为60%左右。
因此,在水平飞行过程中,无人机的功重比可表示为翼载荷的函数,即

(8)
在垂直飞行阶段,假设无人机缓慢上升至指定高度,即螺旋桨轴向来流为零,根据动量定理,无人机的悬停功率为

(9)
式中:wP为螺旋桨轴向诱导速度;ρ为空气的密度;A为桨盘面积;κ为桨盘修正因子,一般取0.90~0.94。
此时垂直飞行阶段的功重比为
(10)
推导发现,水平飞行阶段与常规无人机基本相同,而垂直飞行阶段主要与起飞总重有关,翼载荷选择对垂直阶段功重比影响较小,因此无人机的翼载荷仍由水平飞行阶段的约束关系确定。
针对国内外起飞总重小于6 kg的电动无人机进行主要参数的统计,主要包括Pointer、Raven和Desert Hawk Ⅲ等[12],统计数据如表1所示。在无人机性能指标要求下,通过对功重比与翼载荷的约束分析合理选择无人机的翼载荷,并且通过与同等量级已有无人机的翼载荷(如表1所示)进行比较,即可获得合适的翼载荷,以及无人机在水平飞行的各个阶段的功重比。

表1 无人机主要参数统计数据Table 1 Statistical data of UAV primary parameters
3.2 无人机起飞重量估算
3.2.1 起飞总重迭代初值估算
由于VTOL mEUAV采用螺旋桨-电机动力系统,其能源系统为锂聚合物电池,在飞行过程中无人机的重量不发生变化,即始终为起飞总重。因此VTOL mEUAV的起飞重量可表示为
WTO=WBEMP+WS+WPL
(11)
式中:WBEMP为BEMP(Battery,Electronic speed control,Motor and Propeller)推进系统的重量,该系统一般包括锂聚合物电池、电子调速器、无刷直流电机和定距螺旋桨[13];WS为无人机结构重量;WPL为包含飞控系统等电子设备重量在内的有效载荷重量。
表1同时也对有效载荷重量和起飞总重进行了统计,其中有效载荷占比为有效载荷重量与起飞总重的比值。结果显示,无人机有效载荷重量占比在0.15~0.27之间,平均值为0.20,与Landolfo指出的有效载荷占比值接近[12]。由于该类无人机相比于常规无人机的负载能力相对较低[13],为保证设计余量,可取

(12)
由此,可根据设计目标中的有效载荷与续航时间确定迭代设计的起飞总重WTO的初值。若要求续航时间较长,可适当减小有效载荷占比,进而获得合理的起飞总重迭代初值。
3.2.2 BEMP推进系统重量估算
BEMP推进系统是VTOL mEUAV的心脏,承担了无人机的动力能源输出乃至部分操纵,直接影响无人机续航时间、航程和飞行稳定性等整体性能。在初步设计时,通常没有对所供选择的螺旋桨和电机特性的细致分析与实验,只能通过产品厂商提供的粗略数据进行选择,工作量大且系统性差。Gur和Rosen通过统计电机、螺旋桨和电池等获得统计公式,进行了动力系统的优化,获得了较好的效果[14];王波等通过对使用厂商的电机和电池特性统计,完成了推进系统选择对续航时间的影响规律分析[13]。因此,本文的初步设计过程主要采取统计方法研究螺旋桨和电机的参数规律,进而完成其匹配选择和重量估算。
微小型电动无人机的动力系统通常采用高功率密度无刷电机。货架产品中几乎都标有60S最大运行功率,而实际使用时该功率无法长时间工作,因此,无刷电机允许的最大持续输出功率与电机质量之间的统计关系对实际选择会产生较大误差。本文对国内常用的无刷电机厂商朗宇、T-motor的电机参数进行统计的结果显示,在保证工作效率可接受的条件下,无刷电机与合适螺旋桨匹配可产生的最大静推力Tmax(N)与电机质量mM(g)之间存在线性关系,如式(13)所示,图4为动力系统最大静推力与电机质量的统计关系。
(13)
式中:R为方差。

图4 动力系统最大静推力与电机质量的统计关系Fig.4 Statistical relationship between the maximum static thrust and motor mass
由于不同厂商之间电机工艺差别较大,使得前文中获得的电机质量与最大推力之间的统计关系方差较大,因此,在电机选择时可根据需要选择电机型号,并对该型号电机进行单独统计,以提高估算的准确性。例如,朗宇电机的质量和最大推力数据的单独统计关系为
(14)
Raymer提出该种无人机须有1.3以上的推重比[3];为保证足够的控制能力,常规多旋翼通常将起降所需推力取为最大推力的30%~50%,如大疆四旋翼;对于同时承担操纵功能的动力系统,应选择更大的安全裕度。通过推力需求估算电机质量,获得相应的电机,进而可知匹配桨的规格和最大工作电流。
电调的质量主要取决于动力系统工作的最大持续电流。王波等[13]对工作电流Ilim<60 A的电调进行统计发现,最大允许电流Ilim与电调质量mESC有较好的线性关系,即
Ilim=KESCmESC
(15)
式中:比例系数KESC=1×103A/kg。
无刷电机将电能转化为机械能,通过螺旋桨实现动力输出。由于悬停阶段和巡航阶段轴向来流速度与推力需求均不同,动力系统须满足不同约束条件,
悬停
(16)
巡航
(17)
式中:Tneed和Pneed为同时满足推力输出和控制输出所需的推力和功率;TV_need和PV_need为飞行速度V下所需的推力和功率;Vmax为无人机巡航所能达到的最大速度;VP为无人机动力系统的螺距速度。
Thomas等指出螺旋桨的螺距速度VP与其转速Ωk(kr/min)、螺距Lprop(cm)之间的关系[15]为
VP≈0.18ΩkLprop
(18)
对于采用一套动力系统完成整个飞行过程的尾坐式无人机,动力系统需要同时满足垂直起降和高速巡航2个过程中的推力需求,即需要同时满足悬停和巡航阶段的约束条件。因此,通过悬停推力选择出的动力系统,还需要进行巡航过程约束条件的验证。
3.2.3 能源装置重量估算
在现有成熟的电池技术中,锂电池的比能相对较高,因此VTOL mEUAV通常采用锂电池作为能源装置。电池的容量主要影响无人机的续航时间,通常由设计目标中的续航时间要求进行电池的选择。
根据选择出的动力系统,可获知动力系统工作时所需要的电压为
UB=3.7ncell
(19)
从而确定所需锂电池的单体个数ncell。
在没有详细试验测试时,无人机在整个飞行过程中的电流主要通过功率估算得到。根据前文中功重比,可以获得电池提供的巡航功率PC、爬升功率Pφ、盘旋功率PL以及悬停功率PH。根据无人机的任务剖面,确定飞行过程中的垂直起降时间tH、巡航时间tC、爬升时间tφ和盘旋时间tL,并计算电池容量EB,
EB=ks(PHtH+PCtC+Pφtφ+PLtL)
(20)
式中:ks为安全设计系数,由于锂电池在10%电量余量时性能急剧衰减,因此安全系数取值应稍大,一般取为1.1~1.3,本文取为1.2。
Gur和Rosen[14]对11个不同厂商的LiPo电池统计结果显示,电池容量EB(W·h)与电池质量mB(kg)之间为二次关系,

(21)
由此可以获得电池质量,并根据电压和电池容量的要求选择合适的电池。
3.3 飞翼气动布局和稳定性设计
在VTOL mEUAV中,尾坐式垂直起降无人机以飞翼式布局居多。飞翼式布局气动效率高,结构紧凑,并利于无人机的地面停放和起降。而飞翼式布局的翼型、后掠角、扭转角和重心等的选择,直接决定了飞翼的气动效率与飞行稳定性。
由于飞翼布局不具有常规无人机的水平安定面,为了保证无人机的稳定性,在配平飞行状态下,飞翼应有正的气动俯仰力矩。获得正的俯仰力矩的方式主要有2种:同时设置合理的后掠角与扭转角、或采用反弯翼型[16-17]。若采用适当的后掠角和扭转角,飞翼可使用任意翼型,但对飞行迎角十分敏感,极大地减小了迎角的工作范围。相较而言,反弯翼型更适合于接近90°俯仰角变化范围的尾坐式垂直起降无人机。在0°迎角时,反弯翼型具有较小的正的俯仰力矩,并有效改善了操纵舵面的操纵范围。
基于所得的翼载荷,获得无人机翼面积,估算合理的根梢比和展弦比,设置合理的后掠角和上反角,初步确定几何参数;通过升力要求选择合适的反弯翼型,采用涡格法进行气动估算,修正机翼的几何参数,以满足飞行升力、阻力和俯仰力矩要求。
为保证飞行稳定性,无人机重心须位于焦点之前,并设置合理的静稳定裕度(SM)。通常情况下,微小型飞翼无人机的静稳定裕度为5%~10%。
3.4 基于起飞重量的迭代
微小型无人机结构通常采用层板、轻木、泡沫与碳纤维等制作,其中泡沫材料密度小,结构强度可调节,加工方便,可用来制作机翼。通常情况下,采取泡沫基的碳纤维加强形式制作机体结构亦可有效减轻机体重量。因设备延长线一般与机体固定,当延长线较长导致重量难以忽略时,将其计入机体重量。根据无人机的几何参数,通过CATIA绘制计及翼型参数的无人机草图和大致结构,赋予结构密度,完成结构质量的估算。一般取EPP泡沫密度为30 kg/m3,轻木密度为300 kg/m3,航空层板密度为700 kg/m3,碳纤维密度为1 500 kg/m3,通过CATIA可直接获得估算的结构重量。
通过上述重量的估算,重新获得无人机起飞总重,并与初始假设无人机总重进行比较。如果估算总重超过初始假设总重,则需要重复迭代,直至获得最终的总体设计结果。
3.5 平衡与操纵设计
无人机的平衡与操纵设计直接影响设计的可行性。在全部飞行过程中,VTOL mEUAV均需具有配平状态,初始设计阶段主要考虑悬停与巡航状态,进行配平状态的简单计算。
由于4组动力系统X型飞翼布局的特殊性,垂直飞行过程中可采用动力系统推力差异进行姿态控制,水平飞行过程中采用操纵舵面进行操纵。因此只需对巡航过程进行舵面配平计算。
由于螺旋桨滑流的存在,滑流区内外具有不同的速度。在初步设计阶段,为减少计算量,引入如下可行假设:
1) 动力线与机身轴线平行。
2) 在该雷诺数变化范围内气动系数变化不大,可认为滑流区内外的气动系数基本相同。
3) 由于巡航迎角较小,暂不考虑滑流对迎角的影响。
Randall等指出计及螺旋桨影响的无人机的气动力可近似认为是基于滑流区内外动压的气动力之和[18]。因此水平飞行的配平条件中,相关参数应修正为
(22)
式中:下标in表示滑流区内参数;下标out表示滑流区外参数;α和δe分别为飞行迎角和升降舵偏角;CL α和CL δe分别为升力系数对迎角和升降舵偏角的导数;Cm α和Cm δe分别为俯仰力矩系数对迎角和升降舵偏角的导数;CL0和Cm0分别为零迎角下的升力系数和俯仰力矩系数;Mp为俯仰力矩。
文献[19]表明文献[20]中瑞典皇家理工学院Melin编写的涡格法Tornado程序[20]估算结果可以很好地用于设计与趋势分析。通过Tornado程序进行估算,并计入零升阻力,可获得需要的气动参数。
根据螺旋桨一维动量理论可知,螺旋桨推力为
(23)
对于常规固定翼的巡航状态,有配平条件:
(24)
式中:θ为机体俯仰角。
将式(22)和式(23)代入式(24),求解关于T、α和δe的方程,获得水平飞行过程配平状态。
悬停状态为常规固定翼不具有的状态,此外,由于尾坐式无人机较大的迎风翼面存在,悬停状态中的无人机极易受到外界扰动。在大量飞行试验中发现,该过程中的旋翼偏航操纵力矩较小,在初步设计中需要着重考虑。为改善尾坐式垂直起降无人机固有的旋翼偏航操纵力矩不足的缺陷,本文提出设置合理的动力系统安装角,以通过推力分量获得足够的控制力矩。
4 特殊参数计算及影响分析
与常规无人机不同,BEMP动力系统的匹配工作点计算和动力系统安装角的选择是VTOL mEUAV的特殊参数,功重比的选择也有所不同。因此,本文对运用总体设计方法过程中上述参数的计算与选择及其对设计结果的影响进行了分析和研究。
4.1 功重比的计算及影响
在常规的设计目标下,翼载荷的选择取决于功重比。在相同的起飞重量下,低功重比意味着无人机更加节能[21]。对于微小型垂直起降无人机,能源重量限制严格,因此应尽量选择低功重比。
式(8)为常规设计目标下的功重比-翼载荷关系,通过对式(8)求导可得
(25)
功重比取最小值时翼载荷为

(26)
最小功重比为

(27)
由式(26)可知,常规设计目标条件下,针对功重比的最佳翼载荷与无人机的过载系数有关,与爬升过程参数无关。此外,通过功重比对n和φ的导数可知,随着无人机过载系数n的增大、定常爬升角度φ的增大,无人机的功重比均逐渐增大。
在初步选择时,获得功重比-翼载荷关系,如图5所示。
因此,在不同飞行阶段,功重比对应的最佳翼载荷为
式中:VC为巡航速度。
在最佳翼载荷附近,功重比对过载系数更为敏感,对于爬升角和巡航影响产生的变化较为平缓。由表1可知,量级相近的Raven和Dragon Eye的翼载荷均为63 N/m2左右,综合以上因素,前文选择该无人机的翼载荷为7 kg/m2。此时的功重比为
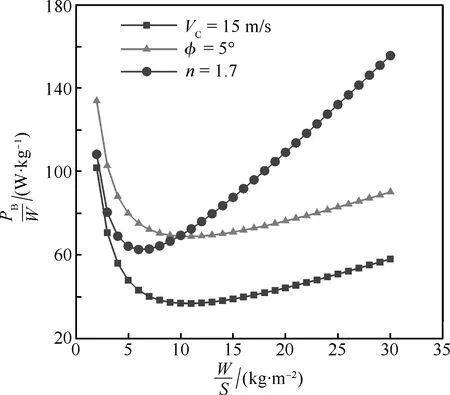
图5 不同阶段中功重比与翼载荷的关系Fig.5 Relationship between power-to-weight ratio and wing-load in different phases
若需要以最大续航时间或最大航程为设计目标,翼载荷的选择均有不同,设计方法中的翼载荷与功重比的选择需要进行修正。
在该限定设计目标下,翼载荷的选取取决于最大航程或最大航时的约束,即
(28)
此时,无人机的功重比为
(29)
4.2 动力系统匹配与工作点计算
在对BEMP推进系统进行重量估计时,采用自行设计的动力系统,文中假设不同阶段时动力系统具有基本相同的较高效率可成立。若装配货架产品,由于2个动力设计点差距较大,螺旋桨和无刷电机的匹配效率通常有较大差异,因此,需对动力系统匹配特性进行详细分析。
结合朗宇电机数据和电机质量估算值,本文选择朗宇2814电机匹配APC1050桨,电机KV值为1 100,其最大静推力工作数据如表2所示。
在验证巡航过程中的动推力时,根据Thomas等阐述的电机螺旋桨工作特性曲线理论[15],基于伊利诺伊大学香槟分校风洞试验测得的精密复合材料(Advanced Precision Composites,APC)螺旋桨数据进行推算,获得电机与螺旋桨的特性曲线,并在此特性曲线的基础上进行匹配判断和耗电分析。图6为电机螺旋桨工作特性曲线的计算流程。

表2 所选动力系统最大静推力状态数据
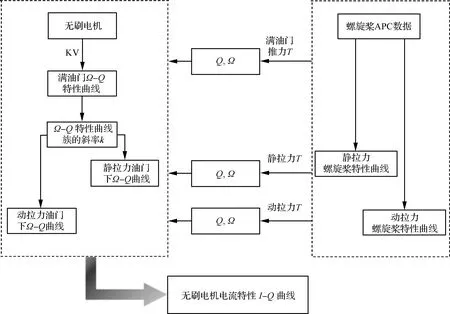
注: Ω为电机转速,r/min; Q为电机扭矩,N·m; I为电机工作电流,A。图6 动力系统匹配特性计算流程图Fig.6 Flow chart for calculation of propulsion matching property

图7 所选动力系统的匹配特性曲线Fig.7 Matching property curves of chosen propulsion
Thomas指出无刷电机在不同工作电压下的转速-扭矩(Ω-Q)特性曲线具有相同的斜率,并且电流-扭矩(I-Q)特性与工作电压无关[15]。以厂商提供的2814电机与APC1050螺旋桨匹配的最大推力和相应电流,以及电机空载电流、KV值、工作电压与APC螺旋桨测试数据为输入,可得各状态下电机-螺旋桨匹配特性曲线,如图7所示。图7表明,螺旋桨与相应的电机油门特性曲线有交点,即悬停工作点与巡航工作点,并均落在满油门与坐标轴围成的区域内,因此该动力系统可以同时满足悬停和巡航时的动力需求。
满油门δt=1时Ω-Q工作特性曲线表达式为
Ω=1 000 (-9.311Q+16.28)
电机I-Q特性曲线表达式为
I=74.652Q+1.500
假设垂直起降过程中4组动力系统输出相同,则电机特性曲线与螺旋桨特性曲线交点即悬停工作点,此时:
巡航速度下的电机Ω-Q工作特性曲线表达式为
Ω=1 000(-9.311Q+5.835)
假设巡航过程中4组动力系统输出相同,则电机特性曲线与螺旋桨特性曲线交点即巡航工作点,此时:
TV=0.766 N,ΩV=5 500 r/min
QV=0.036 N·m,IV=4.18 A
4.3 动力系统安装角的偏航操纵改善及影响
动力系统安装角为该无人机改善偏航操纵的特殊设计,将从安装角的选择,以及对悬停状态和巡航状态下整体操纵性能的影响3个方面进行分析。
4.3.1 安装角的选择
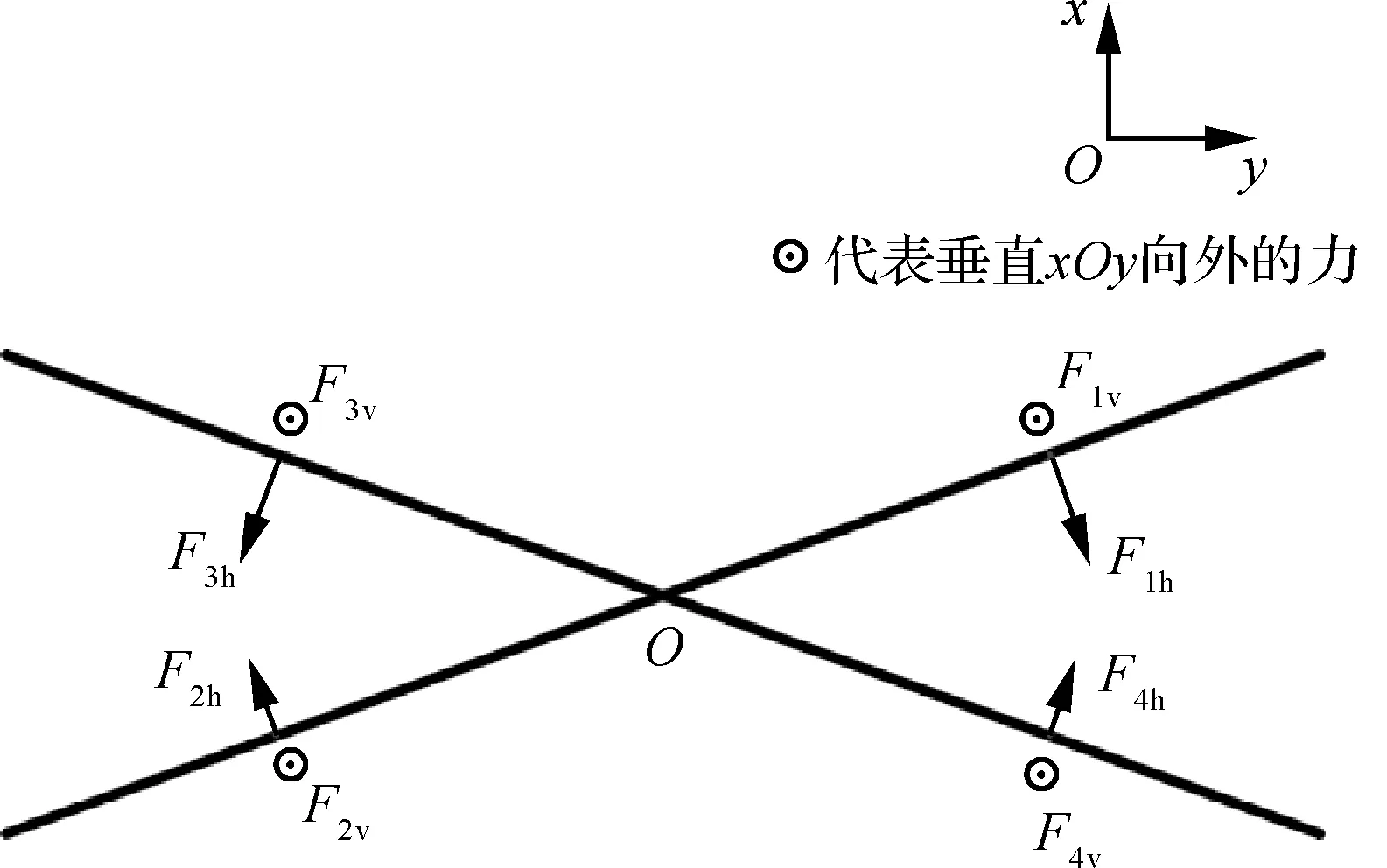
如图8所示,假设2号电机转向为逆时针,偏转后在xOy平面内的分力为T2_xy,距离重心的投影面力臂为l2,在分力相同的情况下,力臂越大,可产生的偏航力矩越大,因此电机应在垂直于机翼的平面内偏转,此时力臂最长,为重心到电机轴线的距离lO m。
电机安装角为零时,偏航力矩表示为
N=[(M1+M2)-(M3+M4)]
(30)
根据反扭力矩方向,电机应内偏,产生分力效果与电机转向相反。假设电机均向内侧偏转γm,则
Nqz=[(T1+T2)sinγm-(T3+T4)sinγm]lOm+
[(M1+M2)-(M3+M4)]
(31)
式中:Ti、Mi(i=1,2,3,4)为第i个电机动力系统产生的推力与反扭力矩;Nqz为电机倾转后的偏航力矩。
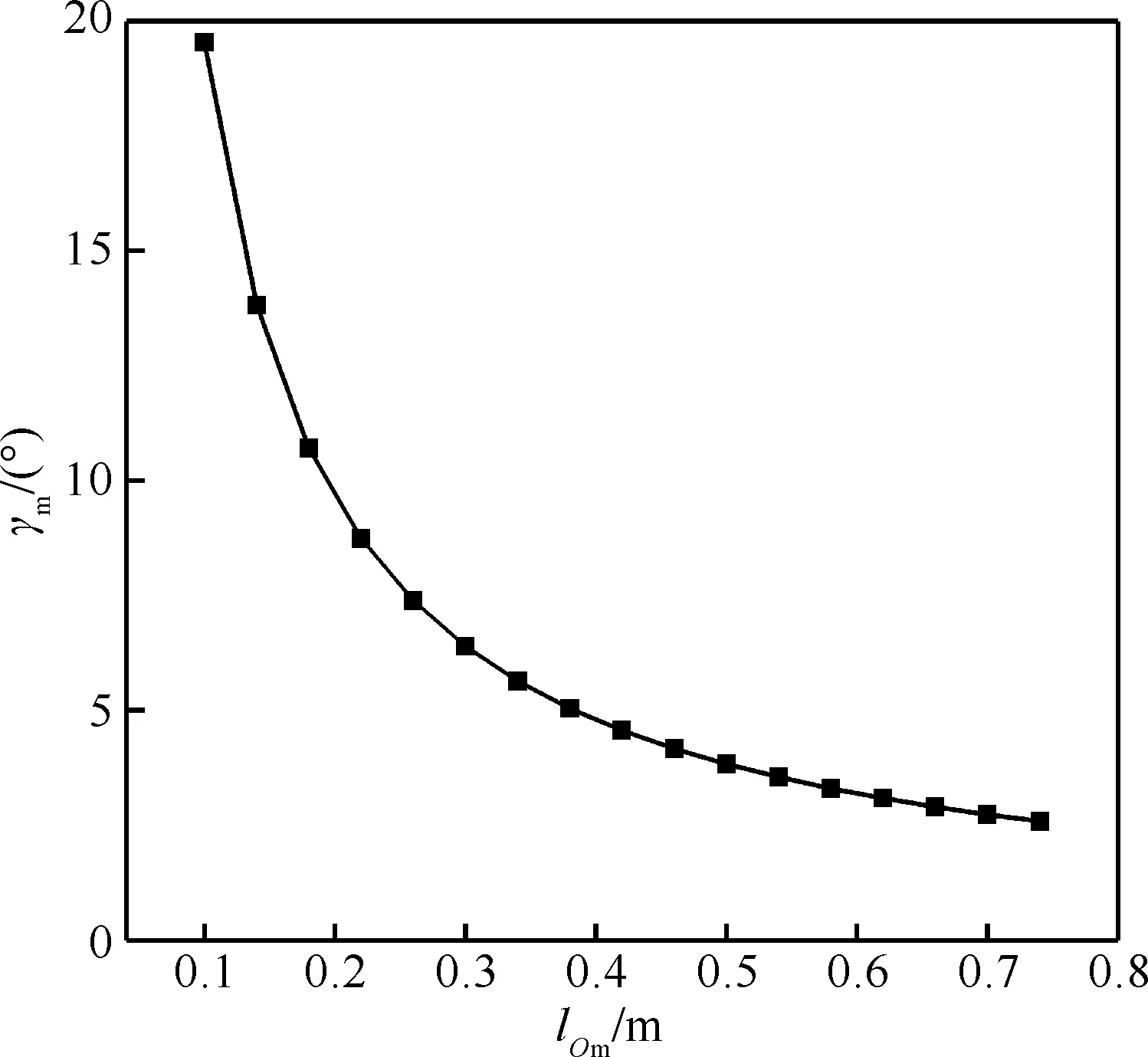
根据操纵能力要求Nqz=σN,可近似认为TilOmsinγm=(σ-1)Mi,于是
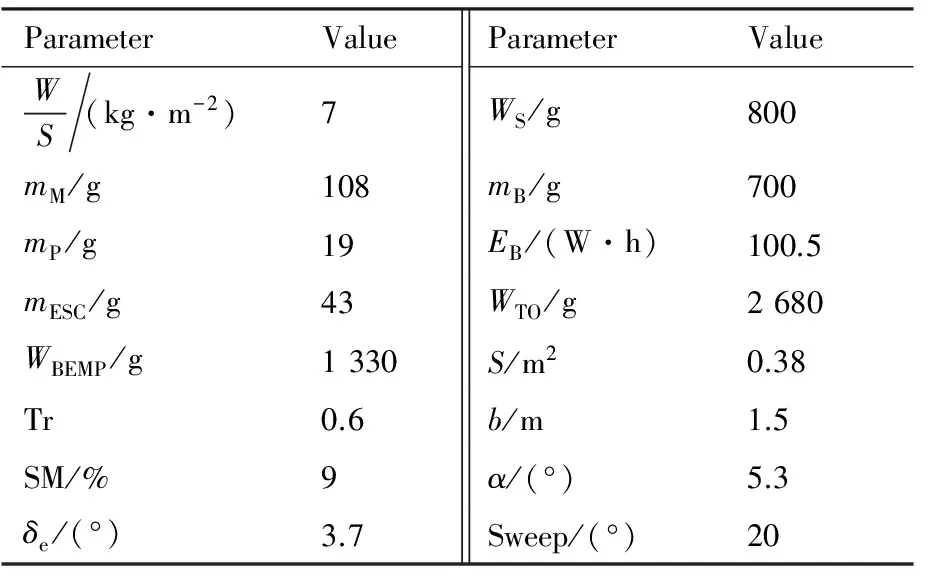
(32)
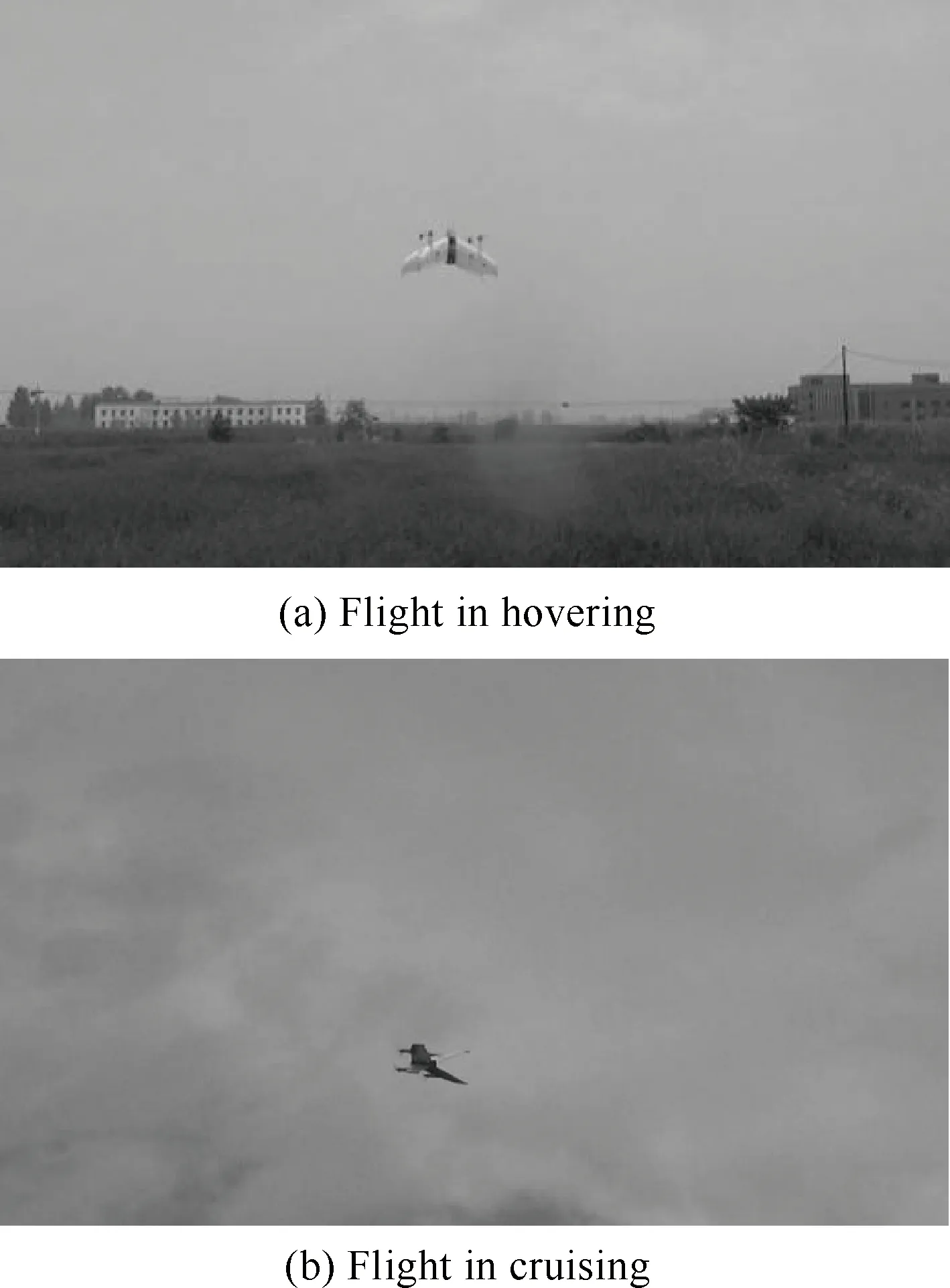
式中:σ为偏航力矩增长倍数需求,若取σ=3,代入悬停推力与力矩,绘制γm-lOm关系曲线,如图9所示。
由图9可见,当lOm>0.5 m时,电机偏转角度γm已经变化不大,但是电机的位置会极大地影响飞机的惯量和结构强度,增加结构重量。此外,结合螺旋桨旋转空间限制,取lOm∈{lOm|0.4 m 取lOm=0.45 m,计算可得γm=4.2°。由此可见,合理的电机安装角可在基本不损失有效推力的情况下获得可观的操纵力矩。 图8 悬停状态下的参数定义Fig.8 Definition of parameters in hovering state 图9 电机安装角与电机距O点距离的关系Fig.9 Relationship between mount angle of motor and distance of motor and Point O 4.3.2 对悬停状态下操纵性能的影响 无人机受到的电机推力在水平面xOy的投影如图10所示。 在旋翼状态下,俯仰和滚转操纵主要通过竖直z方向的Fiv(i=1~4)实现,偏航操纵主要通过电机反扭力矩实现。 假设需要绕y轴的正向俯仰操纵,若1、3电机转速增加,则F1v、F1h、F3v和F3h同时增大,由于重心在O点,并且在电机平面下方,因此F1v、F1h、F3v和F3h均产生正向的俯仰力矩,有助于提升俯仰操纵效率。 图10 电机推力投影分析Fig.10 Analysis of thrust projection 假设需要绕x轴的正向滚转操纵,则F2v、F2h、F3v和F3h同时增大,根据重心的位置,F2v和F3v产生正向滚转,F2h和F3h则产生负向滚转,因此,电机的偏转减小了无人机的滚转效率。但是由于偏转角较小,竖直分力较大,并且滚转力臂较长,因此电机偏转带来的滚转操纵损失影响较小。 4.3.3 对巡航状态下操纵性能的影响 在巡航飞行状态,无人机的配平和操纵通过操纵舵面实现,动力系统只提供所需的推力,可认为各组动力系统提供的推力基本一致。Randall等通过对螺旋桨滑流进行试验分析发现,在迎角较小时,可认为轴向诱导速度不变,且滑流后翼面上的速度基本相同[18],其速度变化分析如图11所示。 轴向诱导速度为 (33) 实际有效速度为 (34) 式中:k′为经验校准系数。由于巡航速度相对较大,且电机偏转角很小,因此螺旋桨诱导速度相对巡航速度小很多,实际速度的大小和方向变化不大。 图11 桨盘前后速度变化分析Fig.11 Analysis of velocities of two sides of propeller 综合上述分析,小的电机偏转角,对固定翼气动和操纵性能影响较小,并能提高旋翼的操纵特性,从而提高无人机的整体性能。 通过总体设计方法和特殊参数的合适选择,最终获得满足要求的设计结果,如表3所示。 基于总体设计结果,通过结构详细设计,选取EPP泡沫制作机体并进行碳管加强,采用航空层板制作电机支撑等受力部件,最终完成无人机的原理样机,并进行试飞试验。样机重量与总体设计得到的最终起飞总重基本相同。图12为悬停阶段和巡航阶段的飞行照片。 表3 总体设计修正结果Table 3 Corrected results of preliminary design 注: Tr为根梢比。 图12 悬停和巡航阶段的飞行照片Fig.12 Pictures in hovering and cruising state 飞行试验证明,本文总体设计方法的设计结果能够完成微小型电动垂直起降无人机的各个飞行过程,验证了设计方法的可行性。由于货架产品标称数据与实际有一定误差,同时气动计算引入了估算误差,通过飞控系统采集的实际飞行时间、飞行状态与设计结果有一定差异。作为初步设计结果可接受,通过后期结合优化设计将获得完全符合设计目标的结果。 针对VTOL mEUAV,分析了其设计难点,并基于特殊的设计参数提出了一种总体设计方法。详细阐述了翼载荷的选择、基于动力系统选择的起飞总重估计、无人机平衡与操纵和飞翼布局设计的方法,并针对特殊设计的X型飞翼尾坐式垂直起降无人机进行功重比、动力系统匹配及工作点计算、动力系统安装角等特殊参数的影响分析,最终基于设计结果完成无人机的制作和飞行试验。 1) 针对常规设计目标,翼载荷取决于不同飞行阶段的功重比,综合不同阶段的最小功重比,均衡各个阶段选择合适的翼载荷。对于有最大航程或最大巡航时间要求的设计目标,翼载荷取决于特殊设计目标提出的约束条件。 2) 文中基于统计的方法完成对BEMP动力系统的选择和重量估计,并通过功率初步确定电池容量,提出对电机-螺旋桨特性匹配曲线进行修正以获得准确的电池容量和重量,最终迭代获得较精确的VTOL mEUAV的起飞总重。 3) 通过对动力系统安装位置与安装角的分析,表明动力系统的安装角和安装位置可在有效推力基本不变的情况下明显改善无人机的旋翼偏航操纵,弥补尾坐式垂直起降无人机的悬停操纵缺陷。 4) 合适的、较小动力系统安装角可以同时兼顾尾坐式垂直起降无人机在悬停阶段和巡航阶段的气动性能和操纵性能,有效提高无人机的整体性能。 基于设计结果制作原理样机,并进行试飞试验,结果证明,该设计方法的设计结果能够完成各个飞行阶段,设计目标中的时间要求和重量优化仍需详细设计与协同优化。 [1] 王冠林, 武哲. 垂直起降无人机总体方案分析及控制策略综合研究[J]. 飞机设计, 2006(3): 25-30. WANG G L, WU Z. Configurations and control strategy for VTOL UAVs[J]. Aircraft Design, 2006(3): 25-30 (in Chinese). [2] HOGEE J V. Development of a miniature VTOL tail-sitter unmanned aerial vehicle[D]. Provo: Brigham Young University, 2008: 2-6. [3] RAYMER D P. Aircraft design: A conceptual approach[M]. Reston, VA: AIAA Education, 1992: 457-540. [4] OOSEDO A, ABIKO S, KONNO A, et al. Development of a quad rotor tail-sitter VTOL UAV without control surfaces and experimental verification[C]∥IEEE International Conference on Robotics and Automation ICRA. Piscataway, NJ: IEEE Press, 2013: 317-322. [5] OOSEDO A, KONNO A, MATSUMOTO T, et al. Design and attitude control of a quad-rotor tail-sitter vertical takeoff and landing unmanned aerial vehicle[J]. Advanced Robotics, 2012, 26(3-4): 307-326. [6] 张啸迟, 万志强, 章异赢, 等. 旋翼固定翼复合式垂直起降飞行器概念设计研究[J]. 航空学报, 2016, 37(1): 179-192. ZHANG X C, WAN Z Q, ZHANG Y Y, et al. Conceptual design of rotary wing and fixed wing compound VTOL aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 179-192 (in Chinese). [7] 唐伟, 王进, 王利光, 等. 一种可变体X型机翼垂直起降微型飞行器: ZL201410233178.0[P]. 2014-08-13. TANG W, WANG J, WANG L G, et al. A VTOL MAV with morphing X-type wing: ZL201410233178.0[P]. 2014-08-13 (in Chinese). [8] KARAKAS H, KOYUNCU E, INALHAN G. ITU tailless UAV design[J]. Journal of Intelligent & Robotic Systems, 2013, 69(1-4): 131-146. [9] WAGNER N, BOLAND S, TAYLOR B, et al. Powertrain design for hand-launchable long endurance unmanned aerial vehicles[C]∥47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Reston, VA: AIAA, 2011: 5-6. [10] HAROLD Y, MING C. Test, analysis and design of propeller propulsion systems for MAVs[C]∥49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Reston, VA: AIAA, 2011: 2-18. [11] 陈军, 杨树兴, 莫雳. 电动无人机动力系统建模与实验[J]. 航空动力学报, 2009, 24(6): 1339-1344. CHEN J, YANG S X, MO L. Modeling and experimental analysis of UAV electric propulsion system[J]. Journal of Aerospace Power, 2009, 24(6): 1339-1344 (in Chinese). [12] LANDOLFO G. Aerodynamic and structural design of a small nonplanar wing UAV[D]. Orlando, FL: University of Dayton, 2009: 35-38. [13] 王波, 侯中喜, 汪文凯. 小型电动垂直起降飞行器推进系统性能分析[J]. 国防科技大学学报, 2015(3): 84-90. WANG B, HOU Z X, WANG W K. Performance analysis of propulsion system of miniature electric-powered vertical takeoff and landing air vehicles[J]. Journal of National University of Defense Technology, 2015(3): 84-90 (in Chinese). [14] GUR O, ROSEN A. Optimizing electric propulsion systems for unmanned aerial vehicles[J]. Journal of Aircraft, 2009, 46(4): 1340-1353. [15] THOMAS J M, IFJU P G, KELLOGG J C, et al. Introduction to the design of fixed-wing micro air vehicles[M]. Reston, VA: AIAA, 2007: 83-95. [16] NICKEL K, WOHLFAHRT M. Tailless aircraft in theory and practice[M]. Reston, VA: AIAA, 1994: 74. [17] 段文博. 可悬停双旋翼微型飞行器设计与制造[D]. 南京: 南京航空航天大学, 2008: 10-16. DUAN W B. The design and manufactory of hovering dual rotor micro air vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008: 10-16 (in Chinese). [18] RANDALL R, HOFFMANN C A, SHKARAYEV S. Longitudinal aerodynamics of a vertical takeoff and landing micro air vehicle[J]. Journal of Aircraft, 2015, 48(1): 166-176. [19] KHAN F A. Preliminary aerodynamic investigation of box-wing configurations using low fidelity codes[D]. Hamburg: Hamburg University, 2010: 18-42. [20] MELIN T. A vortex lattice MATLAB implementation for linear aerodynamic wing applications[D]. Stockholm: KTH Royal Institute of Technology, 2000: 16-40. [21] 刘斌, 马晓平, 王和平, 等. 小型电动无人机总体参数设计方法研究[J]. 西北工业大学学报, 2005, 23(3): 396-400. LIU B, MA X P, WANG H P, et al. Design analysis methodology for electric powered mini UAV[J]. Journal of Northwestern Polytechnical University, 2005, 23(3): 396-400 (in Chinese). Preliminarydesignmethodforminiatureelectric-poweredverticaltake-offandlandingunmannedairialvehicleandeffectsofspecialparameters TANGWei*,SONGBifeng,CAOYu,YANGWenqing SchoolofAeronautics,NorthwesternPolytechnicalUniversity,Xi’an710072,China ThedifficultiesofthedesignoftheminiatureElectric-poweredVerticalTake-OffandLandingUnmannedAerialVehicle(VTOLmEUAV)areanalyzed,andapreliminarydesignmethodbasedonspecialparametersisproposedaccordingtotheoreticalanalysis.Thechoiceofwing-load,estimationoftotalweight,theanalysisofbalanceandcontrol,andthedesignoftaillesswingaredescribed.Thespecialparametersconcerningpower-to-weightratio,propulsionmatchingandmountedincidenceofaX-typetaillesstail-sitterVTOLUAVequippedwithonesetofpropulsionarethenselectedandanalyzed.Basedonthedesignresults,themanufactoryandflighttestsareusedtoverifythedesignmethod.Theresultsshowthatdifferentdesignobjectiveleadstodifferentwing-loadandpower-to-weightratio;propulsionefficiencyandenergyisgreatlyaffectedbymotorandpropellermatching;thesuitableincidenceofproplusionanddeflecteddirectioncanimprovetheyawcontrolinhoverwithoutdecreasingthewholeproperty. VerticalTake-OffandLandingUnmannedAerialVehicles(VTOLUAV);preliminarydesignmethod;X-typeflying-wing;power-to-weightratio;propulsionperformancematchingpoints;mountedincidence;yawcontrolimprovement 2016-11-24;Revised2017-01-22;Accepted2017-05-12;Publishedonline2017-05-310947 URL:http://hkxb.buaa.edu.cn/CN/html/20171012.html NationalNaturalScienceFoundationofChina(11402208) .E-mailyuqingfeng126@mail.nwpu.edu.cn http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 10.7527/S1000-6893.2017.220972 V221 A 1000-6893(2017)10-220972-14 2016-11-24;退修日期2017-01-22;录用日期2017-05-12;< class="emphasis_bold">网络出版时间 时间:2017-05-310947 http://hkxb.buaa.edu.cn/CN/html/20171012.html 国家自然科学基金(11402208) * .E-mailyuqingfeng126@mail.nwpu.edu.cn 唐伟,宋笔锋,曹煜,等.微小型电动垂直起降无人机总体设计方法及特殊参数影响J. 航空学报,2017,38(10):220972.TANGW,SONGBF,CAOY,etal.Preliminarydesignmethodforminiatureelectric-poweredverticaltake-offandlandingunmannedairialvehicleandeffectsofspecialparametersJ.ActaAeronauticaetAstronauticaSinica,2017,38(10):220972. (责任编辑:徐晓)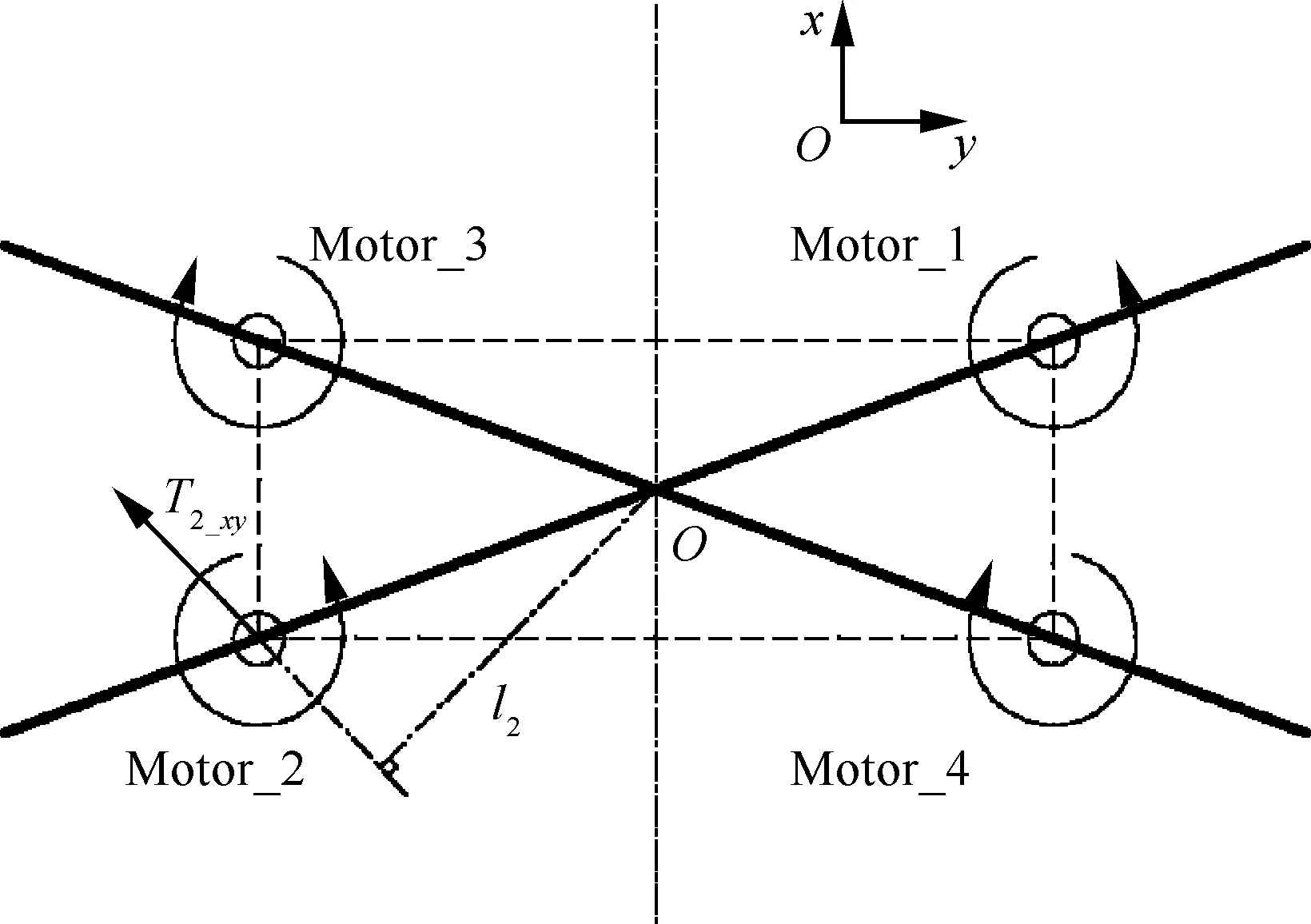


5 总体设计结果与飞行试验
6 结 论
猜你喜欢
——“永远跟党走”黄浦江两岸光影秀的总体设计考虑
照明工程学报(2022年3期)2022-07-30
航天返回与遥感(2021年3期)2021-07-19
建材发展导向(2021年24期)2021-02-12
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
科教导刊·电子版(2016年29期)2016-12-23
当代体育科技(2014年4期)2014-12-05
体育学刊(2013年6期)2013-12-06