一种新型球形机器人虚拟样机的设计及运动仿真
2017-11-16 02:04:30张云伟代进轮
软件 2017年10期
刘 欢,张云伟,代进轮
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
一种新型球形机器人虚拟样机的设计及运动仿真
刘 欢,张云伟*,代进轮
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
提出了一种采用双齿轮齿条传动机构的新型球形机器人设计方案,该方案在球形机器人同一直径方向上安装两组齿轮齿条传动机构作为内部驱动装置,论文详细介绍了该球形机器人的机械结构,并通过受力分析对其直线运动和转弯运动的运动原理进行了理论分析。联合使用SOLIDWORKS和ADAMS,建立了球形机器人的虚拟样机并进行运动仿真。受力分析和运动仿真结果验证了该球形机器人结构的可行性,为物理样机后期制作提供依据。
球形机器人;ADAMS;虚拟样机;运动仿真
0 引言
球形机器人由内部驱动装置和球形外壳组成,运动方式是滚动。具有空间占比低、运动转弯灵活、行驶阻力小、抗倾翻能力强的优点,适合行驶在各种恶劣环境中,备受国内外研究者的关注。Halme等[1]设计出来世界上第一个球形机器人,内部驱动单元是一个驱动轮,通过驱动轮在球壳内部的滚动改变配重中心位置来驱动球体前后运动,Bicchi等[2]人将内部驱动装置换成二轮小车,这两种结构的内部驱动装置与内球面直接接触,容易出现打滑的情况。Javadi等[3]人设计了一种名为“August”的球形机器人,该球形机器人的内部驱动机构是四根呈正面体结构的丝状轮辐组成,每个轮辐上装有配重块,通过配合改变每个轮辐上的配重位置来使系统运动,北京邮电大学孙汉旭等[4]研制的 BYQ3机器人通过两个电机分别驱动两个配重块绕两个互相垂直的轴转动,产生机器人直线运动轴转向运动的驱动力,这两种球形机器人都依赖多个轴向的动力源来使机器人运动,当控制机器人转弯时,需要同时协调多个方向上的驱动力矩,对于内驱动单元系统的协调性要求较高,控制复杂。
传统产品设计方法是按照模型设计、样机试制、试验、改进定型等步骤一步一步操作,若是在试验之后发现错误只能重新改造物理样机再次重新试验,如此反复,耗费大量的时间和成本[5]。而球形机器人的机械结构一般不易多次拆分和组装,因此若将传统产品设计的方法运用到球形机器人设计上,显然不现实。
针对上述球形机器人驱动机构和设计方法存在的不足,设计了一种双齿轮齿条驱动的球形机器人,具有传动效率高不易打滑的优点,同时采用双齿轮齿条驱动机构,不需要协调多个方向的动力源驱使机器人转动,使得机器人的转向变的简单。对球形机器人直线运动和转弯运动进行受力分析。利用虚拟样机技术设计出球形机器人的数字化样机,并且进一步对其进行直线和转弯状态的运动仿真。
1 双齿轮齿条驱动球形机器人的机械机构
双齿轮齿条驱动球形机器人的机械结构简单对称,内部驱动单元采用左右对称的齿轮齿条传动机构,可以解决用轮子机构驱动球形机器人时驱动轮在球形内表面容易打滑的问题,同时由于齿轮齿条传动的高效性,可以减小电机的驱动力矩。所设计的球形机器人的总体机构简图如图1所示。该装置主要由外球壳 1、左齿轮齿条传动机构 2和右齿轮齿条传动机构3组成。其中左右齿轮齿条传动机构的齿条上分布着螺纹孔,通过配套的螺钉分别与外球壳固连。齿轮齿条传动机构的详细简图如图2所示,包括内齿条1、直线齿轮2、直线齿轮约束装置3和直流伺服电机 4组成。直线齿轮 2与内齿条 1啮合,直流伺服电机轴承与直线齿轮连接,直线齿轮约束装置3分别紧贴地安装在直线齿轮2的左右两边,内齿条1的两侧延伸有两圈圆弧轨道,直线齿轮约束装置3的一端与圆弧轨道接触,这样设计的目的是避免直线齿轮2在绕着内齿条1转动时偏离内齿条所在的轨道。
2 运动原理理论分析
球形机器人主要有直线运动和转弯运动,为了便于运动原理分析,简化球形机器人模型,做以下几点假设。
1. 球形外壳等效为质量为Mb半径为R的薄壁球壳;

图1 总体机构简图Fig.1 General organization diagram
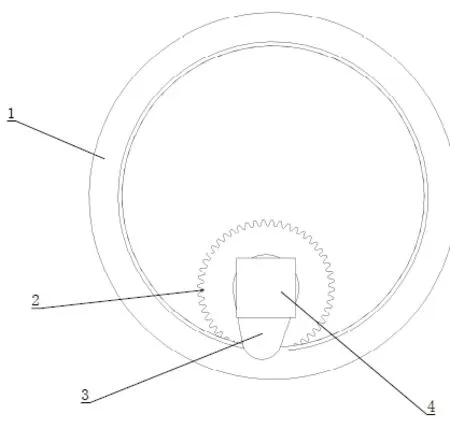
图2 齿轮齿条传动机构简图Fig.2 Diagram of gear rack transmission mechanism
2. 当直线运动时,球壳内除了两个直轮外的电机、电机输出轴、直线齿轮约束装置这些结构等效为位于球心位置质量为M的质点,在转弯运动时,以上机构可以看作位于球壳直径方向上质量为1/2M的两个质点;
3. 左右直线齿轮分别等效于质量为 ml=mr=m的质点,与球心对称平面的水平距离为d。
由于双齿轮齿条驱动球形机器人左右 结构对称,可以将复杂的非完整系统转化为完整系统来分析。将球形机器人在平面上的运动等效为一个圆盘在二维平面上的运动。直线运动原理分析如下:当左右电机转速、初相位和方向完全相同时,左右直线齿轮则可以等效为质量为2 m的直线齿轮,直线齿轮与内齿条啮合传动,齿轮位置的变化使球形机器人的质心在水平面上的投影成周期性变化,产生驱动力矩,球形机器人向前滚动。在地面上建立静坐标系 O-XY,球形机器人初始位置在 o点,球体上的o’点与o点重合,图3为某时刻球形机器人在直线运动时的受力分析图。
当左右电机的转速相同方向相反时,带动左右直线齿轮以相同速度反向在大齿条上齿合转动,使左右惯性力在水平方向上的分力大小相同,方向相反。对球形机器人的垂直于水平方向的竖直中心轴产生旋转力矩,使得球形机器人绕竖直中心轴转动,实现转向。图4是球形机器人某一时刻转向运动状态和受力分析图。

图3 球形机器人直线运动受力简图Fig.3 Diagram of force analysis on straight motion of spherical robot

图4 球形机器人转向运动受力简图Fig.4 Diagram of stress analysis on turning motion of spherical robot
3 虚拟样机三维实体建模
ADAMS是一种目前应用较广泛的虚拟样机仿真软件,使用ADAMS软件可以在虚拟环境中真实地模拟系统的运动,并且不断改进设计缺陷。ADAMS/View只提供了一些简单模型物体的创建,难以创建较复杂的物体模型,所以联合使用 SOLIDWORKS和ADAMS建立球形机器人的虚拟样机。图5是建立虚拟样机模型的流程图。

图5 虚拟样机模型建立流程图Fig.5 The flow chart of virtual prototype model establishment

图6 系统添加约束和驱动后的模型Fig.6 Model of system with contact and motion
由于球形机器人的运动方式特殊,在 ADAMS中不能直接添加球壳与平面的接触力,无法直接模拟球壳在平面上滚动,为了解决这个问题,可以在ADAMS/view中添加一张具有一定厚度的矩形平板,矩形平板与大地之间添加固定副,采用在球壳和矩形平板之间添加接触力(Contact)的方法来解决[6]。最后给左右齿轮齿条传动机构分别施加驱动(Motion),使模型按照设计要求进行运动仿真,添加约束和驱动后的虚拟样机模型见图7。

图7 直线运动球心在X轴位移变化图Fig.7 Diagram of ball’s displacement variation in X – axis on straight motion

图8 直线运动球心在Z轴位移变化图Fig.8 Diagram of ball’s displacement variation in Z – axis on straight motion
4 仿真计算及其结果
为了验证双齿轮齿条驱动的球形机器人在平面上是否具有直行、转弯以及越过障碍物的能力,用ADAMS对球形机器人进行直线运动、转弯运动仿真。按照设计要求,选取球形机器人几种典型的运动状态仿真计算。在下面的叙述中,lω代表左齿轮齿条传动机构电机的转速,rω代表右齿轮齿条传动机构电机的转速,在ADAMS界面中,机器人球心在水平面的投影落在XOZ平面上,并且球心的初始坐标值为(0,0,0),机器人初始正前方向为Z轴负方向,机器人左右方向分别为X轴负方向和X轴正方向。下面分别对这几种运动状态进行讨论和仿真。
(1)直线运动
(2)转弯运动

图9 原地转弯运动球心在X轴位移变化图Fig.9 Diagram of ball’s displacement variation in X– axis on spot turning
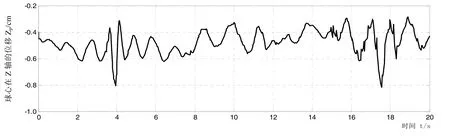
图10 原地转弯运动球心在X轴位移变化图Fig.10 Diagram of ball’s displacement variation in Z– axis on spot turning

图11 弧线转弯运动球心在Z轴位移变化图Fig.11 Diagram of ball’s displacement variation in Z– axis on Arc turning

图12 弧线转弯运动球心在X轴位移变化图Fig.12 Diagram of ball’s displacement variation in X– axis on Arc turning
5 总结
本文设计了一种双齿轮齿条驱动的新型驱动结构的机器人,对其进行了直线运动和转弯运动的受力分析,把非完整系统转化为在二维平面上的完整系统,从理论上分析了所设计的球形机器人具有直线运动和转向运动的能力。利用SOLIDWORKS创建了球形机器人的三维实体模型,利用ADAMS建立虚拟样机模型,并且对其分别进行直线和转向的运动仿真,进一步验证了所设计的球形满足直线行走和转向运动的要求,为物理样机的制作奠定了基础。
[1] Halme A, Schonberg T, Wang Y. Motion Control of a Spherical Mobile Robot[C]//In 4th International Workshop on Advanced Motion Control (AMC’96). Japan: Mie University,1996, 259-264.
[2] Bicchi A, Balluchi A, Prattichizzo D, Gorelli A. Introducing the Sphericle: an Experimental Testbed for Research and Teaching in Nonholonomy [C]//In Proc. IEEE Int. Conf. on Robotics and Automation. 1997, 2620-2625.
[3] Javadi A, Mojabi P. Introducing August: a Novel Strategy for an Omnidirectional Spherical Rolling Robot[C]//In Proc.IEEE Int.Conf. on Robotics and Automation. Washington:San D C, 2002, 3527-3533.
[4] 肖爱平, 孙汉旭, 谭月胜, 等.一种球形机器人运动轨迹规划与控制[J]. 机器人, 2004, 26(5): 444-447.Xiao Aiping, Sun Hanxu, Tan Yuesheng, et al. Movement trajectory planning and control for a spherical robot [J].Robot, 2004, 26(5): 444-447.
[5] 郑建荣. ADAMS—虚拟样机技术入门与提高[M]. 北京:机械工业出版社, 2001.Zheng Jianrong. ADAMS—Introduction and Improvement of virtual prototype technology[M]. Beijing: China Machine Press, 2001.
[6] 李团结, 朱超, 基于虚拟样机技术的球形机器人的运动仿真研究[J]. 系统仿真学报, 2006, 18(4): 1026-1029.Li Tuanjie, Zhu Chao, Research on Motion Simulation of Spherical Robot Based on Virtual Prototype Technology with ADAMS[J]. Journal of System Simulation, 2006, 18(4):1026-1029.
Design of Virtual Prototype and Motion Simulation for a New Type of Spherical Robot
LIU Huan, ZHANG Yun-wei*, DAI Jing-lun
(School of Information Engineering and Automation, Kunming University of Science and Technology, Kunming 650500, China)
The design of a new spherical robot driven by double gear rack transmission mechanisms is proposed.As the driving mechanism inside, two sets of gear rack transmission mechanism are installed along the same radial direction of the spherical robot. And the force analysis is given for the straight motion and turning movement of the robot. The modeling of the virtual prototype and motion simulation of the spherical robot is developed by using SOLIDWORKS and ADAMS. Its force analysis and motion simulation verified the feasibility of structure of spherical robot. This work provides reliable references for the development of the physical prototype.
: Spherical robot; ADAMS; Virtual prototype; Motion simulation
TP391.9;TP24
A
10.3969/j.issn.1003-6970.2017.10.005
本文著录格式:刘欢,张云伟,代进轮. 一种新型球形机器人虚拟样机的设计及运动仿真[J]. 软件,2017,38(10):23-28
国家自然科学基金资助项目(51365019)
刘欢(1991-),女,硕士研究生,研究方向:智能机器人。
张云伟(1972-),男,云南昆明人,昆明理工大学教授、博士,主要研究方向:机器人学与机器人技术。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26 14:05:04
装备制造技术(2020年4期)2020-12-25 05:26:04
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
中学生数理化(高中版.高二数学)(2018年1期)2018-02-26 07:40:29
教学考试(高考数学)(2017年2期)2017-08-11 12:10:19
时代农机(2016年6期)2016-12-01 04:07:20
福建中学数学(2016年4期)2016-10-19 05:09:02
水利科技与经济(2016年7期)2016-04-25 13:03:04