
齿轮旋转式FBG位移传感器设计
2017-11-16 02:04邓霄冉庄君刚赵振刚
软件 2017年10期
邓霄冉,庄君刚,黄 嘉,赵振刚,李 川
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
齿轮旋转式FBG位移传感器设计
邓霄冉,庄君刚,黄 嘉,赵振刚,李 川
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
为了满足对石油、化工、变电站等高危环境的设备位移检测。 本文设计了一种齿轮旋转式光纤Bragg光栅(Fiber Bragg Grating, FBG)位移传感器。传感器由两个同心半径不同的齿轮和两个齿条组成,采用齿轮旋转式结构,在等强度悬臂梁的上下表面中心轴线上各粘贴一只具有相同敏感系数的FBG。本文分析了该位移传感器的工作原理,建立了其理论数学模型。通过对所设计的齿轮旋转式光纤光栅位移传感器进实验测试,得到传感器的静态性能特性:传感器的线性度为 1.554%FS,检测灵敏度为 8.96pm/mm,迟滞为 4.82%FS,重复性误差为 4.31%FS。经实验证明,该传感器可靠性高、对结构自身影响小,可直接测量结构位移,适合于长期工程结构监侧。
光纤Bragg光栅;齿轮旋转式位移传感器;等强度悬臂梁;静态特性
0 引言
近几年来,由于山体滑坡、公路塌陷、桥梁和隧道坍塌等土木工程安全事故的频繁发生,造成了我国的巨大的经济损失。作为土木结构的健康检测中一种是常见且基本的检测方法,位移检测应用广泛[1-3]。工程实践中工作人员提前判断边坡、公路、桥梁、变电站等土木工程是否存在危害,发现并进行维修,这对提高土木结构的防灾能力和确保道路运输的安全具有重要意义[4-5]。
光纤光栅传感器具有抗干扰能力强、化学特性稳定、绝缘性良好、耐高温、传输总能耗低等优点,常被使用在高压强、强腐蚀性、超高低温等高危特殊的工作环境中[6]。本文设计了一种齿轮旋转式FBG位移传感器,详细阐述了其工作原理,建立合理的传感模型,并通过正反行程实验得到该传感器的所有静态性能指标,测试过程科学严谨。经过验证,本传感器适用于石油、化工、变电站等高危环境中,具有工程实践意义[7]。
1 传感器结构与工作原理
1.1 传感器结构设计
齿轮旋转式FBG位移传感器的结构如图 1 所示。传感器由测量杆、齿条支架、齿轮齿条、弹簧、等强度悬臂梁、FBG、阶梯轴、带座滚动轴承、金属盒组成。在等强度悬臂梁的上表面中心轴线上粘贴一只FBG1, 下表面中心轴线上粘贴一只FBG2,两只FBG具有相同的敏感系数。
当测量杆受力产生位移时,测量杆向下移动,齿条1产生向下位移,带动齿轮1转动,将直线运动转换为齿轮的回转运动,由此将位移测量杆的位移变化转化为齿轮的角度变化。齿轮2与齿轮1同心且连接,因此齿轮2与齿轮1所转的角度完全相同。齿轮2与齿条2配合将回转运动再转化为直线位移,将角度变化转化为位移变化,齿条2将位移作用到等强度悬臂梁的自由端,改变悬臂梁的两端自由挠度,产生形变,使悬臂梁上表面中心轴上表面的FBG受压,产生负应变,上光栅中心波长变小,下表面中心轴上的 FBG受拉,下光栅中心波长变大。检测该波长漂移量,通过位置大小转换装置传递模型可以得到实际外部位移[8-9]。
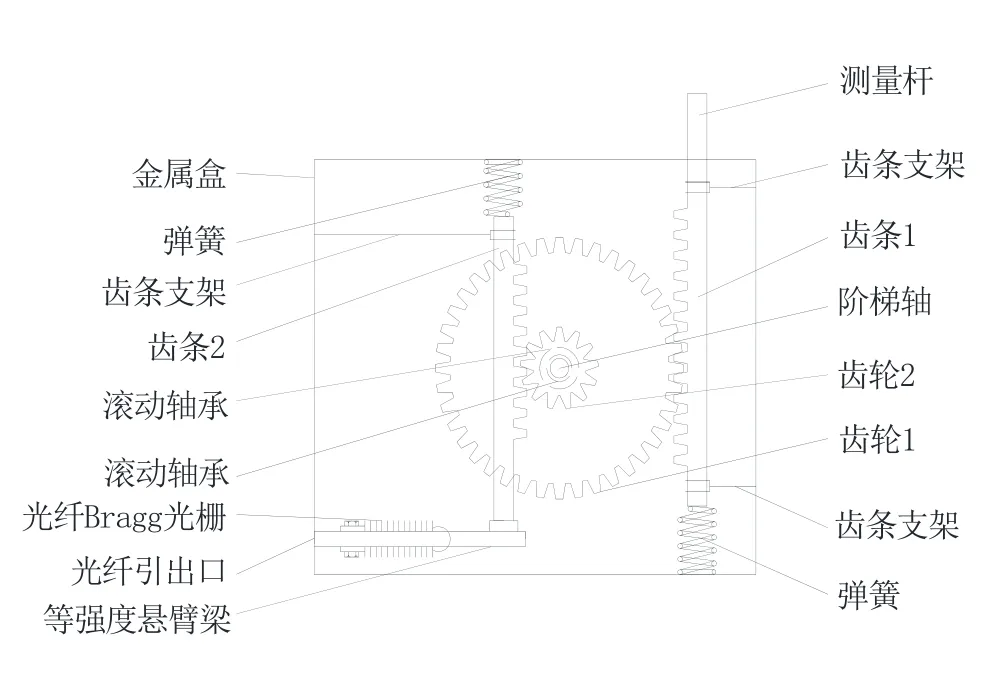
图1 传感器结构图Fig.1 Sensor structure
1.2 传感器传感模型
如图2所示,FBG的折射率呈现出固定的周期调制分布,入射光经过光栅,将一部分相位相符的光反射回去,当入射光满足下式时,即可反射回去。

式中:neff为光纤光栅的有效纤芯折射率;λB为FBG的谐振波长;Λ为光纤光栅的栅格间距。
由于外界环境变化时,Λ和neff都会发生变化,在实际测量中,考虑温度变化量 ΔT和应力变化量Δɛ,计算计算应力变化和温度共同作用下的光栅波长位移量为:

式中:Sɛ为应变灵敏系数(其中 Sɛ=1-pe);pe为有效弹光系数(pe=0.22); Sr为温度敏感系数λB为 FBG中心波长;Δɛ为 FBG所受应力量;ΔT为FBG的温度变化量。

图2 光纤光栅传感特性Fig.2 Fiber bragg grating sensing characteristics
传感器结构采用了等强度悬臂梁,由位移引起弹性元件上点x处截面的轴向应变式可表示为:

式中:f为悬臂梁自由端的位移;h为等强度悬臂梁的厚度;l为等强度悬臂梁的长度。
在实际测量中,齿条1位移S大小等同于实际位移,表示为:

式中:R1为齿轮1的半径;R2为齿轮2的半径。
可得FBG的Bragg波长移位与外部实际位移的关系为下式:

位移传感器所测的位移S与光纤光栅的波长位移之间的数学模型可由式(5)计算。通过测量光纤光栅的波长移位就可以得到待测位移。
2 传感器实验
为了证实传感器的有效性,设计了如下实验。如图3所示,传感器实验由宽带光源、分析仪、耦合器、光纤、显示器和齿轮旋转式纤Bragg光栅位移传感器组成。
将制作好的FBG位移传感器放置在实验桌上,再测量杆的一端使用刻度尺来控制行程,刻度尺的零端与传感器盒子边缘对齐。宽带光源发出的光经过耦合器和光纤到达光栅,当测量杆一端位移发生变化后,光栅反射的波长变化光信号通过解调仪转化为可以被计算机识别的电信号,传输到计算机中,最终经过计算机软件的计算得到相应的波长值。
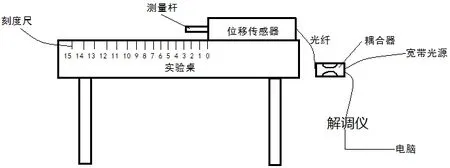
图3 传感器测试实验原理图Fig.3 Sensor test experimental schematic diagram
2.1 零飘实验
零点漂移是指当输入信号为零或不存在时,输出信号端的FBG中心波长缓慢变化漂移的现象。为保证实验准确性,先进行零漂实验,对传感器进行零点标定。在实验过程中每5分钟记录一次波长数据,当 Bragg波长在某个范围内产生振荡时,得到稳定状态下的波长如图4所示。上、下表面FBG的中心波长稳定后分别为λB1=1548.202 nm和λB2=1545.106 nm。
2.2 正、反行程实验
零漂实验和预载实验完成后,进行六次正、反行程实验,分别进行三次正行程实验和反行程实验,每次实验以10 mm作为前进量和后退量。正行程实验从0 mm增至150 mm,反行程从150 mm减至0 mm。每10分钟进行一次实验,每移动10 mm记录一次FBG的中心波长。
结合三次实验的数据,可知:正、反行程时,上表现FBG1心波长分别表现为减小、增大,下表面FBG2心波长分别表现为增大、减小。这是由于在正行程过程中,上表面光栅受到压缩,下表面光栅受到拉伸,同理,在反行程实验中上表面光栅受到拉伸下表面光栅受到压缩,与设计原理相符。

图4 FBG中心波长漂移数据Fig.4 FBG center wavelength drift data
3 实验数据分析
根据实验数据,对传感器进行静态特性分析。实际情况下,传感器的静态特性输出为非线性。为了使读数均匀统一,采用一条拟合直线来代替实际的特征曲线。线性度是代表其线性程度的一个指标,使用相对误差来表示线性度,其公式为:

式中:(Δλ)max为三次正、反行程实验中上、下光栅中心波长差的算术平均值与拟合直线上的参考值之间的最大差值,yFS为满量程光纤光栅中心波长变化量。
结合三次传感器实验数据,使用最小二乘法处理后,表面波长差值算术平均值和位移量如图5所示。
由拟合直线图中波长差值的算术平均值与拟合参考值的最大偏差为传感器的满量程输出为2.059 nm,所以齿轮旋转式 FBG位移传感器的线性度为1.554%FS,由此证明传感器的线性度较好。
齿轮旋转式 FBG位移传感器的灵敏度为传感器 FBG波长变化量与传感器的位移变化的最大值之比,即:

式中:Δλ为传感器FBG波长变化量,ΔS为传感器的位移变化的最大值。将位移传感器的三次正、反行程的灵敏度取算术平均值可得到系统灵敏度为8.96 pm/mm。
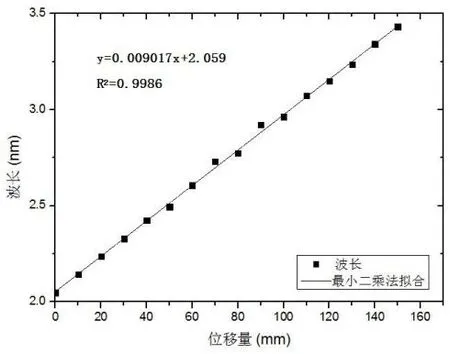
图5 拟合直线图Fig.5 Fit the line graph
实验过程中,正、反行程时最大波长偏差值与实验满量程波长移位值之比为传感器的迟滞,即:

式中:(ΔH)max为正、反行程实验过程中最大波长偏差值,(Δλ)FS为实验满量程波长移位值。
由表1可知,在正、反行程实验过程中,上、下表面FBG的ΔHmax分别为0.018nm和0.047nm。根据式(8)两支FBG的迟滞分别为2.67%FS和6.97%FS。根据传感器差动式双光栅测量结构,将两支光栅中心波长最大偏差值的算术平均值代入式(8)得到传感器的迟滞为4.82%FS。
Bragg光栅位移传感器来说,重复性误差反复施加同一位移量时,光纤Bragg波长移位数值保持稳定的特性,表示为:

式中:Δmax为正、反行程实验过程中同一位移量的实际输出信号之叫的最大偏差,(Δλ)FS为实验满量程波长移位值。
根据表2可得齿轮旋转式FBG位移传感器的重复性误差为:R=4.31%FS。
4 结论
本传感器考虑到了使用两个半径不同的齿轮同轴旋转,配合齿条传动。可将外部大位移通过机械传动转化为作用在等强度悬臂梁上的小位移,扩大了位移的测量范围。
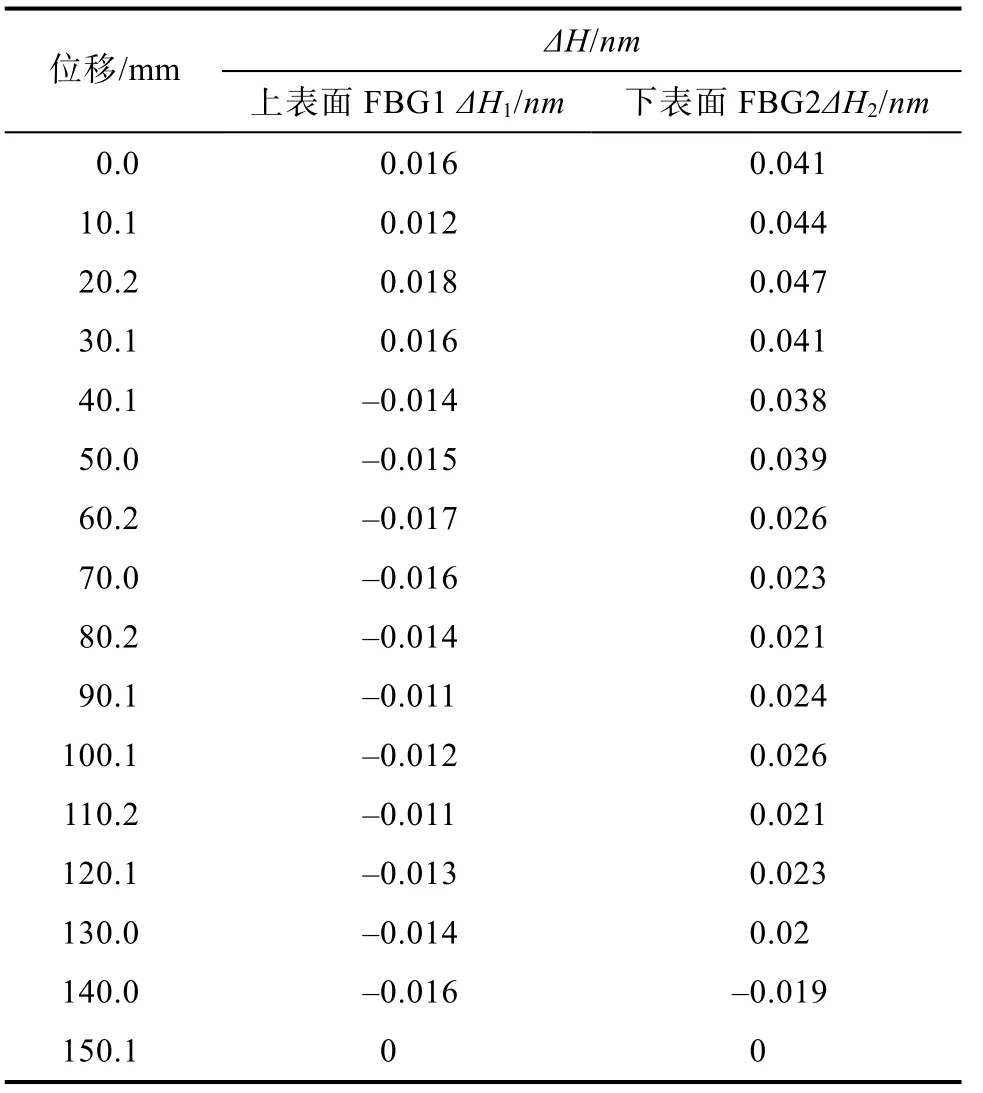
表1 三次正,反行程实验波长最大偏差值Tab.1 Positive and reverse stroke experimental wavelength maximum deviation value
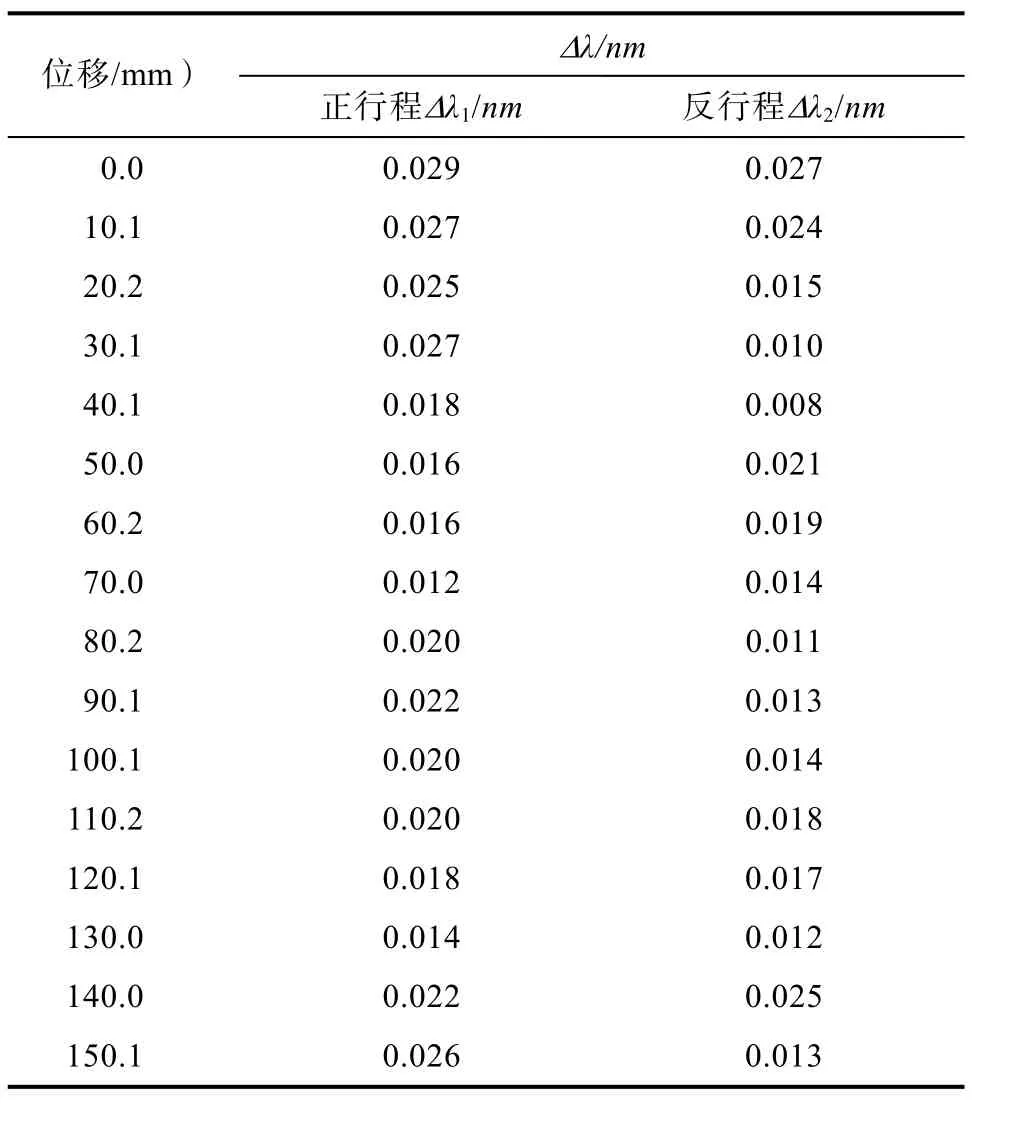
表2 各位移推进量对应的波长最大差值Tab.2 The maximum difference of the wavelengths corresponding to each displacement propulsion
通过反复进行科学的实验,证明齿轮旋转式FBG传感器相关的静态特征指标如下:线性度为1.554%FS,灵敏度为8.96 pm/mm,迟滞为4.82%FS重复性误差为R=4.31% FS。实际测量值与理论值基本相同,证明本传感器设计可行。
[1] 丁勇, 施斌, 隋海波. 隧道结构健康监测系统与光纤传感技术[J]. 防灾减灾工程学报, 2005, 25(4): 375-376.DING Y, SHI B, SUI H B.Technology of Tunnel Structure Health Monitoring System and Optical Fiber Sensing Technology[J]. Journal of Disaster Prevention and Mitigation Engineering, 2005, 25(4): 375-376.
[2] 张晨. FBG传感器在隧道工程结构检测中的应用研究[D].昆明: 昆明理工大学, 2008.Zhang C. FBG sensor in the tunnel engineering structure detection application[D]. Kunming: Kunming University of Science and Technology, 2008.
[3] 昌学年, 姚毅, 闰玲. 位移传感器的发展及研究[J]. 计量与测试技术, 2009, 36(9): 42-43.Chang X N, Yao Y, Li L. Development and Research of Displacement Sensor [J]. Measurement and Testing Technology, 2009, 36(9): 42-43.
[4] 吕辰刚, 张瑞峰, 李可佳等.光纤光栅传感网络对桥桩结构的健康检测[J]. 光电子.激光, 2010, 21(11): 1668-1669.LV C G, Zhang R F, Li K J, et al. Fiber Bragg Grating Sensing Network for Bridge Pile Structure Health Detection[J]. Photonics. Laser, 2010, 21(11): 1668-1669.
[5] 韩涛, 黄家会, 李建清. 基于光纤光栅传感技术的深井井壁结构监测[J]. 工程学报, 2011, 28(11): 89-99.HAN T, HUANG J H, Li J Q.Study on Monitoring of Shaft Structure Based on Fiber Bragg Grating[J]. Journal of Engineering, 2011, 28(11): 89-99.
[6] 姜德生, 何伟. 光纤光栅传感器的应用概况[J]. 光电子.激光, 2002, 13(4): 420-421.Jiang D S, He W. Application of Fiber Bragg Grating Sensor[J]. Photonics. Laser, 2002, 13(4): 420-421.
[7] Mufti Aftab A, abossière Pierre, Neale Kenneth W. Recent Bridge Applications of FRPs in Canada[J].Structural Engineering International, 2002, Vol.12(No.2): 96-98.
[8] 邹杰, 刘晓婷, 杜二超等. 升降机齿轮齿条接触的联合仿真分析[J].机械传动, 2013, 37(10): 69-71.ZOU J, LIU X T, DU E C, et al. Multi-simulation analysis of gear rack and pinion of elevator[J]. Mechanical Transmission,2013, 37(10): 69-71.
[9] 李永波, 魏禹. 齿轮齿条传动机构的虚拟样机研究[J]. 应用科技, 2013, 40(2): 55-62.Li Y B, Wei Y. Study on Virtual Prototype of Gear Rack Transmission Mechanism [J]. Journal of Applied Science and Technology, 2013, 40(2): 55-62.
Design of Gear Rotary FBG Displacement Sensor
DENG Xiao-ran, ZHUANG Jun-gang, HUANG jia, ZHAO Zhen-gang, LI Chuan
(Faculty of Information Engineering and Automation, Kunming University of Science and Technology, Kunming 650500, China)
In order to meet the oil, chemical, substation and other high-risk environment, equipment displacement detection. A gear rotating fiber Bragg grating displacement sensor (Fiber Bragg Grating,FBG)is designed. The sensor consists of two different concentric gears and two racks. A gear-rotating structure is used to attach an FBG with the same sensitivity coefficient to the upper and lower center axes of the equal strength cantilever beam. After analyzes the working principle of the displacement sensor, and establishes its theoretical mathematical model. The sensitivity of the sensor is 1.554% FS, the detection sensitivity is 8.96pm / mm, the hysteresis is 4.82% FS, and the repeatability error is 4.31%. The static performance characteristics of the sensor are obtained by the experimental test of the designed gear rotating FBG displacement sensor. % FS. Experiments show that the sensor has high reliability and little influence on the structure itself, and can directly measure the structural displacement, which is suitable for long - term engineering structure.
: Fiber bragg grating; Gear rotary displacement sensor; Equal strength cantilever beam; Static characteristics
TP212
A
10.3969/j.issn.1003-6970.2017.10.003
本文著录格式:邓霄冉,庄君刚,黄嘉,等. 齿轮旋转式FBG位移传感器设计[J]. 软件,2017,38(10):14-17
国家自然科学基金(51567013)
邓霄冉(1993-),女,在读硕士研究生,主要研究方向:FBG传感器检测。
李川,教授,博士生导师,主要研究方向:传感器的研制与检测应用。
猜你喜欢
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
高师理科学刊(2016年8期)2016-06-15
水利科技与经济(2016年7期)2016-04-25
重型机械(2016年1期)2016-03-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
应用化工(2014年11期)2014-08-16
雷达学报(2014年4期)2014-04-23
机电信息(2014年23期)2014-02-27
机电信息(2014年17期)2014-02-27
