
油菜钵体苗移栽栽植孔成型机设计与试验
2017-11-15 09:28吴明亮官春云贺一鸣罗海峰
农业机械学报 2017年10期
向 伟 吴明亮 官春云 贺一鸣 罗海峰 颜 波
(1.湖南农业大学工学院,长沙 410128; 2.南方粮油作物协同创新中心,长沙 410128;3.湖南农业大学农学院,长沙 410128)
油菜钵体苗移栽栽植孔成型机设计与试验
向 伟1,2吴明亮1,2官春云2,3贺一鸣1,2罗海峰1,2颜 波1,2
(1.湖南农业大学工学院,长沙 410128; 2.南方粮油作物协同创新中心,长沙 410128;3.湖南农业大学农学院,长沙 410128)
为实现打穴式移栽机高效成型满足农艺要求栽植孔,基于打孔移栽作业的工作特点,融合油菜移栽农艺要求,设计了一种纯滚动式油菜移栽栽植孔成型机。通过分析纯滚动机构运动机理,研究成孔机构的运动参数方程,建立成型栽植孔的参数方程。采用Matlab软件生成栽植孔理论轮廓线,并生成成型栽植孔的外形图,运用CATIA软件进行仿真分析得出成型栽植孔的轮廓曲线图,并将上述图形进行拟合模拟,验证了成孔机构结构参数与运动参数的合理性。试制样机,进行田间试验,试验结果表明:机具以慢2挡工作状态下前进速度为1.80~1.96 km/h,作业效率达到0.306~0.333 hm2/h,在黏土、壤土和砂土3种土壤中试验,其成孔的平均合格率分别达到了94.4%、93.3%、90.4%,表明研制的成孔机能成型满足设计要求的栽植孔。
油菜; 移栽; 栽植孔; 成孔机构
引言
目前,全国油菜种植主要有直播和移栽2种模式,作为中国冬油菜主产区的长江流域,其种植面积占全国总面积95%以上,仍采用油菜移栽种植模式,且现有的油菜移栽大多采用纯手工劳动作业,劳动效率、经济效益低,因此须加速发展油菜移栽机械[1-2]。
针对油菜等作物移栽技术,国内外提出了3种不同栽植原理的移栽机械[3-7]。开苗沟式移栽机:选用栽植器将幼苗栽植入苗沟开沟器在田间开出的栽植沟中,进行覆土镇压,完成幼苗的移栽;该类机型可快速作业,工作效率较高,但是一般要求在翻耕地上作业,要求土壤疏松细碎,田间前茬秸秆、杂草等较少[8-12]。鸭嘴栽插式移栽机:鸭嘴式栽植器刺入土壤后张开在土壤中形成栽植孔,鸭嘴张开将幼苗栽入栽植孔内,提升鸭嘴式栽植器,进行覆土完成幼苗的移栽;该类机型能同时完成成孔与幼苗栽植工作,栽植过程中对秧苗没有夹持力,不易伤苗,栽植过程中对秧苗起到一定扶持作用,能保证秧苗较好的直立度;但要求土壤疏松细碎,土壤含水率较低,田间前茬秸秆、杂草等较少,对幼苗苗龄和外观形状要求高[13-18]。打穴式移栽机:打穴机构在土壤中成型栽植孔,投苗机构同步将幼苗栽入栽植孔中,进行覆土与镇压,完成幼苗的移栽;该类机型可在翻耕地及未翻耕地上作业,对幼苗苗龄和外观形状较宽泛,但是对土壤土质及含水率要求较高[19-22]。
现有研究成果中,开苗沟式移栽机和鸭嘴式移栽机均要求土壤疏松细碎、含水率较低,田间前茬秸秆、杂草等较少;开苗沟式移栽机作业,秧苗的破损率较高无法保证秧苗的直立度;鸭嘴式移栽机对幼苗苗龄和外观形状要求高,喂苗速度不能过高,移栽速度受限。打穴式移栽机也存在对土壤土质及含水率要求较高等问题,但是该类机型作业受到前茬秸秆和杂草的影响较小,对栽植幼苗要求较低,可实现快速移栽作业,因此发展打穴式移栽技术具有较好的科研前景[23-27]。作为打穴式移栽机械关键工序的成穴技术仍未取得突破性进展。因此,本文基于移栽油菜农艺要求,结合旱地移栽作业的工作特点,设计一种纯滚动式油菜苗移栽栽植孔成型机。通过成孔机构在土壤中成型栽植孔,随后取苗、送苗机构同步配合将幼苗投入到栽植孔内,实施覆土、镇压完成油菜苗的栽植。
1 栽植孔成型机整体设计
1.1 农艺和技术要求
移栽油菜钵苗的基质为方锥台形,其上、下端面边长a1、a2分别为35 mm和25 mm,高h0为40 mm;油菜的栽植密度为12万~16万株/hm2,栽植深度一般为30~60 mm;为此,本研究提出成型U型栽植孔,利于幼苗的顺利入孔并保证其立苗率[20]。根据油菜钵苗物理特性,要求成型栽植孔有效孔径50 mm,有效孔深50 mm。
本机设计的工作厢面为1 700 mm,排水沟宽度200 mm,故每厢栽植油菜的实际厢面为1 500 mm,按农艺要求,行距为250~300 mm,株距没有设定要求,但需要保障栽植密度为12万~16万株/hm2的前提下,保持成条,利于油菜生长的通风、采光和后期收获。
1.2 整机结构与工作原理
图1为纯滚动式油菜移栽栽植孔成型机结构示意图,主要由履带行走系统、旋耕开沟系统、成孔机构、控制系统、限位机构、机架等组成。
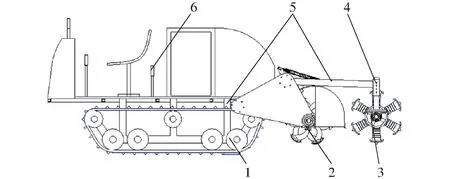
图1 整机结构简图Fig.1 Structure diagram of whole structure1.履带行走系统 2.旋耕开沟系统 3.成孔机构 4.限位机构 5.机架 6.控制系统
工作时,随着机器的前进,旋耕开沟系统对土壤进行翻耕并成型排水沟,成孔机构依靠与土壤间摩擦力进行纯滚动,均匀分布在孔刺安装盘(简称安装盘)上的柱形孔刺(简称孔刺)承受成孔机构的自身重力而周期性地刺入、拔出土壤,在土壤中形成一系列规则的栽植孔。当孔刺刺入土中,土壤给套筒式压土板(简称压土板)向上推力,推动复位弹簧一起沿孔刺轴线方向收缩,随着孔刺拔出土壤,复位弹簧的弹力作用使得套筒式压土板沿孔刺轴线向外舒张,套筒式压土板在收缩与舒张的过程中,复位弹簧的弹力始终作用于套筒式压土板,使其压实栽植孔周边的土壤,保证孔刺出土后栽植孔周边的土壤不会回填入已成型的栽植孔,同时压土板在孔刺上进行回复运动时将孔刺上沾附的泥土刮掉,有效防止孔刺沾泥。
2 成孔机构参数化设计
成孔机构是纯滚动式油菜移栽栽植孔成型机的核心部件。作业中随着机器的前进,孔刺合理的刺入、拔出土壤而在土壤中成型栽植孔。其布置方式、结构参数与运动参数决定了成孔效果,而栽植孔的形状参数直接影响移栽质量,是保证秧苗立苗率、低覆苗率等栽植质量的重要工序[28-30,20]。
2.1 总体结构
图2为成孔机构结构简图,主要由孔刺、安装盘、复位弹簧、压土板、弹性套、打孔滚轴、轴承座支架和连杆等组成。
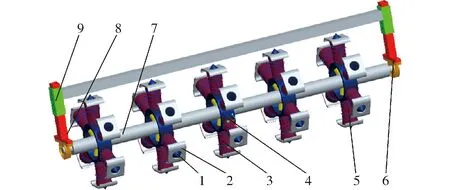
图2 成孔机构结构简图Fig.2 Structure diagram of hole-forming mechanism1.孔刺 2.压土板 3.弹性套 4.安装盘 5.复位弹簧 6.轴承座 7.打孔滚轴 8.轴承座支架 9.限位装置
为利于孔刺顺利入土,设计孔刺上端为圆柱体,其下端为锥体,以安装盘的轴线为中心线均匀布置的孔刺通过安装盘固连在打孔滚轴上,在孔刺的外径上分别套装有复位弹簧、弹性套和压土板。打孔滚轴两端插装在轴承座内,轴承座通过螺栓固设在设有限位孔的轴承座支架上,轴承座支架通过圆柱销与限位装置联接。
2.2 孔刺安装盘数量
根据油菜移栽农艺要求设定行距为300 mm,株距为200 mm,则栽植密度约为14.7万株/hm2,满足农艺要求。根据行距设定300 mm,每个厢面移栽5行油菜,打孔滚轴上均匀安装5个孔刺安装盘,每2个孔刺安装盘之间中心距为300 mm,即为行距,每个厢面的两侧均有排水沟,故最左端与最右端的2个孔刺安装盘与排水沟端面中心距设为150 mm,如图3所示。
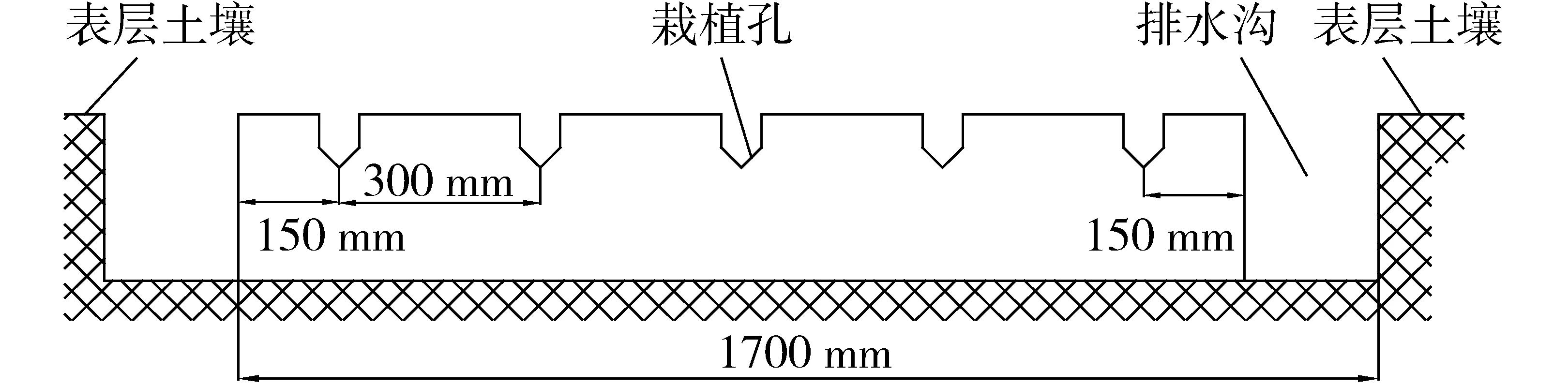
图3 工作厢面Fig.3 Operating compartment
2.3 成孔机理及参数方程
2.3.1孔刺的运动轨迹
栽植孔是孔刺在土壤中滚动的过程中由于土壤的弹塑性变形而留下的孔刺印痕[19],如图4a所示。随着成孔机构的滚动,孔刺上主要存在3个特殊点(顶点A、端点B和C)的轨迹组合成型栽植孔的外形轮廓,如图4b所示;顶点A从开始入土到最低位置的运动过程为入土过程,向前下方运动并剪切和挤压土壤,当运动到最低点后,向后上方运动并剪切和挤压土壤;端点B从开始入土到最低位置的运动过程中,向前下方运动并剪切和挤压土壤,当运动到最低点后即开始出土过程,并不与土壤接触,随着机具的旋转拔出土壤;端点C从开始入土到最低位置的运动过程中,向前下方运动并剪切和挤压土壤,当运动到最低点后即开始出土过程,向后上方运动并剪切和挤压土壤。孔刺依次地刺入和退出土壤,使得土壤中留下与孔刺运动轨迹相似的栽植孔。
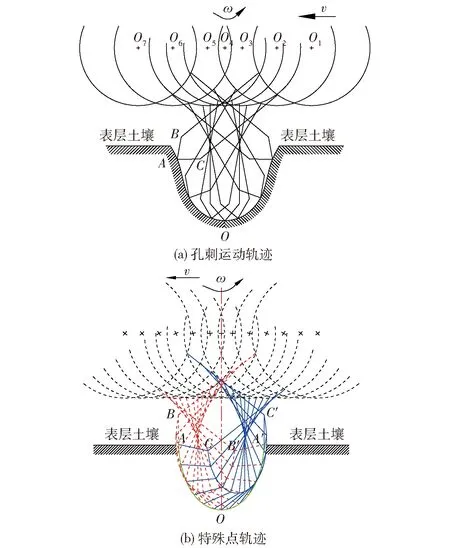
图4 孔刺运动分析Fig.4 Punch movement analysis
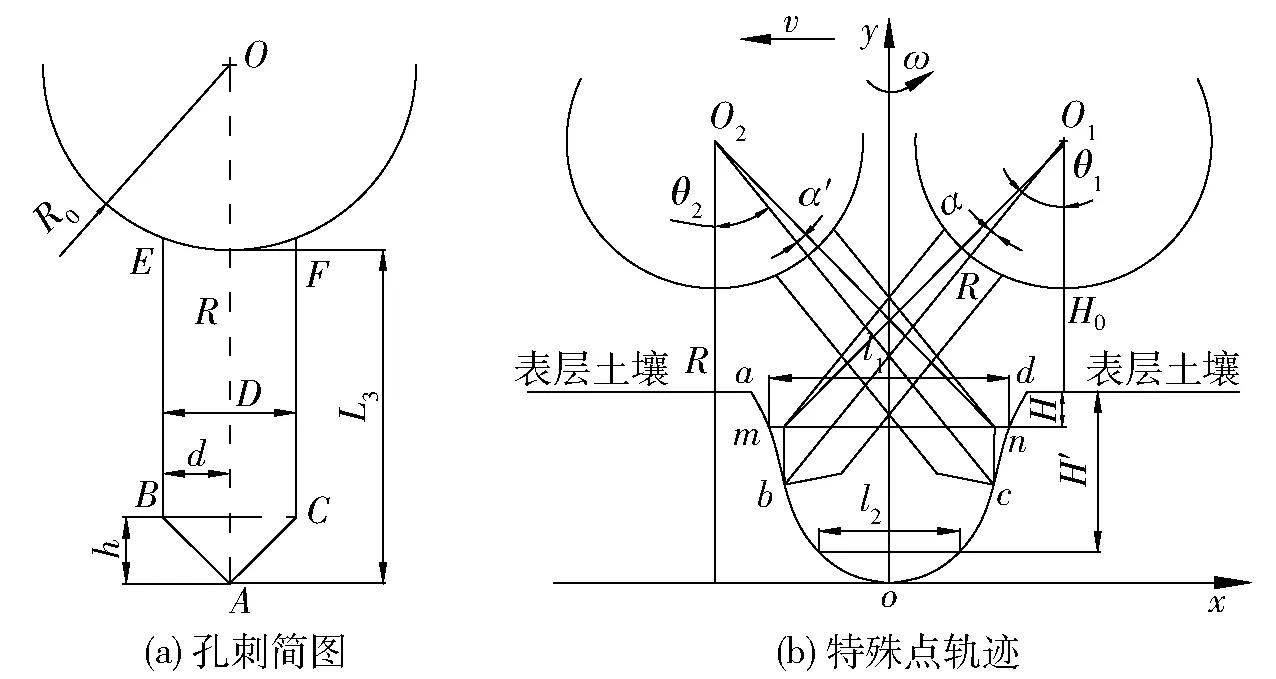
图5 孔刺上各点运动轨迹Fig.5 Movement tracks of various points on punch
2.3.2栽植孔的参数方程
栽植孔是孔刺外轮廓与土壤相互作用形成的,因此孔刺在土壤中形成的栽植孔的理论形状实际上就是孔刺运动轨迹的包络线轨迹。
如图5所示,孔刺的位置用孔刺中线(孔刺顶点A与打孔滚轴O点的连线)与垂线的夹角θ表示;孔刺在正常工作状态下形成的栽植孔可以用a-b-o-c-d形成的包络线来表示,主要分为3部分:入土过程中,孔刺运动轨迹ab段为端点B的运动轨迹,又称栽植孔前缘;出土过程中,孔刺运动轨迹cd段为端点C的运动轨迹,称栽植孔后缘;bc段为孔刺顶点A运动轨迹的一部分。
(1)入土过程中,栽植孔前缘ab段的参数方程为
(1)
其中


式中R——孔刺的理论滚动半径,mm
δ——滑转率
r——孔刺实际滚动半径,mm
α——孔刺端点B与轴中心O1的连线和孔刺中线的夹角,为负值
θ1——入土过程孔刺的转动弧度,数值逐渐变小,为负值
h——孔刺末端锥体高度,mm
d——孔刺半径,mm
D——孔刺直径,mm
(2)出土过程中,栽植孔后缘cd段的参数方程为
(2)
其中
α′=-α
式中θ2——出土过程孔刺的转动弧度,数值逐渐变大,为正值
α′——孔刺端点C与轴中心O2的连线和孔刺中线的夹角,为正值
(3)顶点A轨迹,bc段参数方程为
(3)
式中θ3——孔刺尖端A点的转动弧度
入土过程,θ3逐渐变小,为负值;出土过程逐渐变大,为正值。
通常情况下,公式(1)~(3)的参数方程分3段描绘出栽植孔的外形尺寸。当孔刺末端锥体高度取较大值时,栽植孔的外形完全由孔刺尖端A点的运动轨迹形成,此时栽植孔的参数方程可直接由式(3)表达。
当孔刺的理论半径R取值较小,运动过程中孔刺的柱形端面(图5中的BE面、CF面)将与土壤接触,对栽植孔上部的土壤进行剪切和挤压,从而导致栽植孔上部开口过长,无法形成满足要求的栽植孔。
2.3.3栽植孔形状参数
联立公式(1)~(3)绘制如图5所示轨迹曲线,得到a-b-o-c-d组成的实线轮廓即为栽植孔的理论外形。显然,可由公式直接求出轮廓上各点的坐标,通过计算运动轨迹上特殊点的坐标来描述栽植孔的形状并将其参数化。
图5b中,m点为栽植孔前缘上的任意点,n为栽植孔后缘上的任意点,m、n点位于H高度处的同一水平线上,由于成孔机构的结构呈中心对称,其栽植孔前缘与栽植孔后缘也与y轴中心对称,故栽植孔在H处的纵长l1为

(4)
其中
式中H0——打孔滚轴轴心O1离地高度,mm
同理可得,栽植孔在H′深处的纵长l2为
l2=2[R(1-δ)sinθ3-Rθ3]
(5)
其中
2.3.4安装盘和孔刺参数
孔刺的滚动半径R(由安装盘半径R0、孔刺长度L3构成)、孔刺数量N是成孔机构的关键参数;孔刺安装盘的半径与机具前进速度没有直接关联性,但若R0过大,孔刺数目相应的增多,增加了整机质量,成孔机构的制造费用相应增加。
成孔作业时,在孔刺入土过程中滚动半径瞬时变化,移栽作物的株距L为孔刺安装盘顶圆的节距,即
(6)
按农艺要求移栽作物的栽植深度h′=50 mm,结合孔刺前端锥形尺寸,孔刺的入土深度需达到70 mm,孔刺外围需套设复位弹簧与弹性套,且复位弹簧需要一定的缓冲距离,孔刺长度L3至少取值到120 mm。设计安装盘半径R0约为70 mm即可满足需求,将数据代入式(6)得:N≈6。
确定每个安装盘上孔刺数量N取值为6,且株距为200 mm,可求得孔刺的长度

(7)
式中C——安装盘的滚动周长
安装盘的半径R0取值70 mm,孔刺长度L3取值为121 mm,故孔刺的旋转半径为191 mm。考虑在孔刺外部套有复位弹簧与弹性套,故安装盘的宽度B1需设定为100 mm,每个安装盘上均匀分布安装6个孔刺,孔刺外径取D=50 mm,孔刺末端锥体高度取20 mm。
3 成孔机构验证与仿真分析
3.1 数值验证试验材料与方法
为验证成孔理论分析的准确性与成型栽植孔参数模型的可靠性,根据栽植孔的参数方程(公式(1)~(3)),结合成孔机构设计的结构参数:孔刺滚动半径R=191 mm、孔刺长度L3=121 mm、孔刺外径D=50 mm、孔刺末端锥体高度h=20 mm、孔刺最大入土深度L4=70 mm,假定机具的滑转率为零等,设定直角坐标系,求取极值点的坐标值,采用Matlab 7.0软件编写程序,自动生成孔刺的运动轨迹图,即成型栽植孔的外形图,并对图形进行网格化显示[30]。
根据成孔机构的结构参数,利用Pro/E 5.0软件建立机构的三维实体模型,添加约束并形成虚拟装配模型导入到CATIA软件中,对模型进行简化,结合成孔机构的运动参数(前进速度v和角速度ω)进行运动仿真,得出孔刺的运动轨迹图,即成型栽植孔的轮廓曲线图。
根据成型栽植孔形状参数方程(公式(4)、(5)),结合设计的成孔机构结构参数R、L3、D、h等,利用Matlab软件进行编程,可求解出成型栽植孔的开口纵长L0、栽植孔在H深处的纵长l1、孔上部横上宽度L1等物理参数。成孔机构工作时,套筒式压土板对栽植孔周边的土壤具有一定的压实,栽植孔周边土壤存在一定程度下陷,故利用Matlab 7.0软件求解栽植孔在H深处的纵长l1、l2时,H分别取值为5、10、15、20、25、30、35、40、45、50、55、60 mm。综合考虑滑转率的影响,滑转率分别取为0、0.10、0.20、0.25。
3.2 结果与讨论
图6所示为Matlab 7.0软件自动生成孔刺的运动轨迹图,即成型栽植孔的外形图。以栽植孔的最低点为横坐标零点建立直角坐标系,并对图形进行网格化显示,可在图形显示中直接测量成型栽植孔的相关尺寸参数。
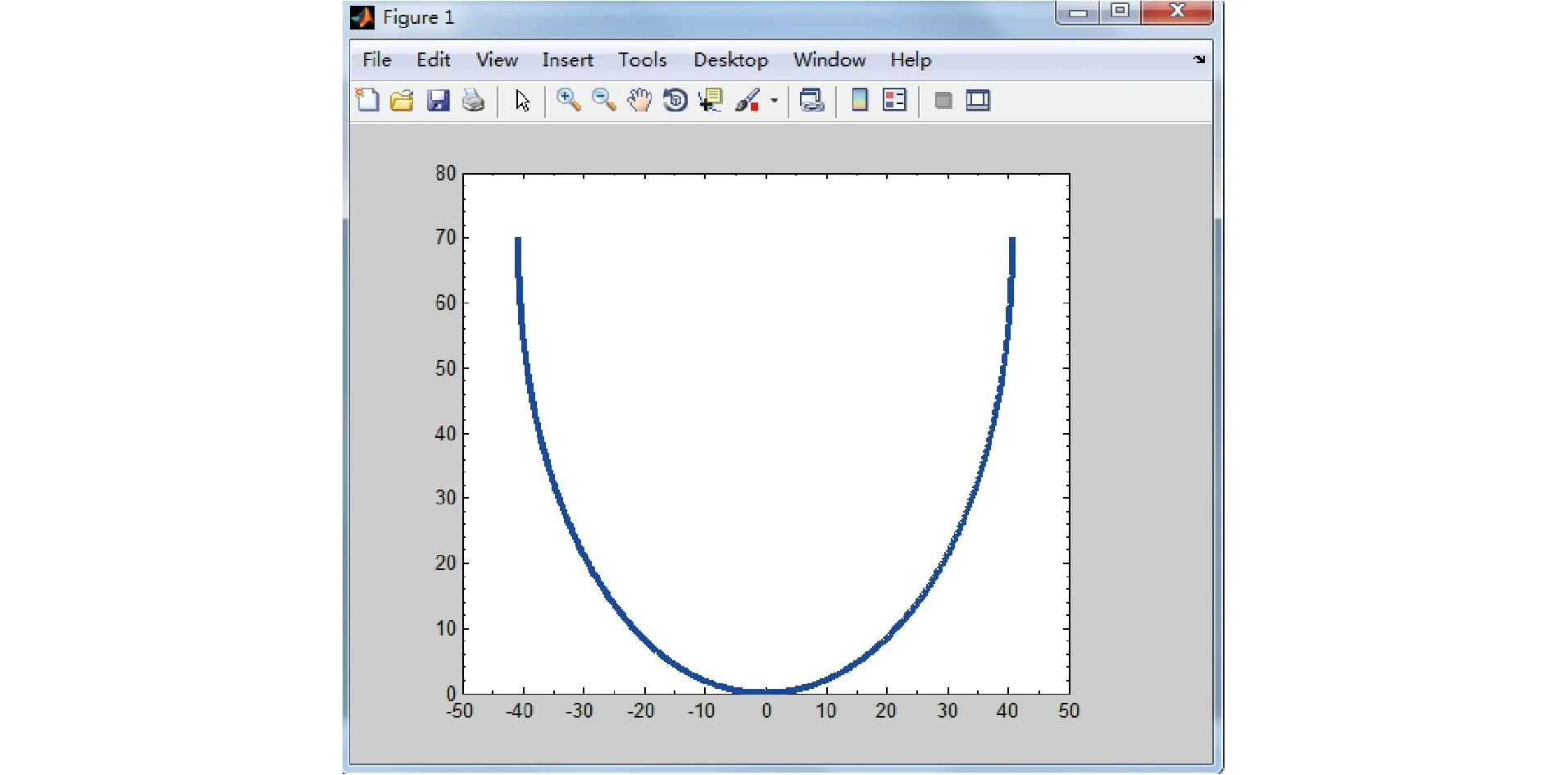
图6 理论轮廓曲线Fig.6 Theoretical contour curve
图7所示为CATIA软件仿真分析得出孔刺的运动轨迹图,图中的光滑曲线即成型栽植孔的轮廓曲线图,在软件中对图形进行网格化显示,可有效读取成型栽植孔的相关尺寸参数。
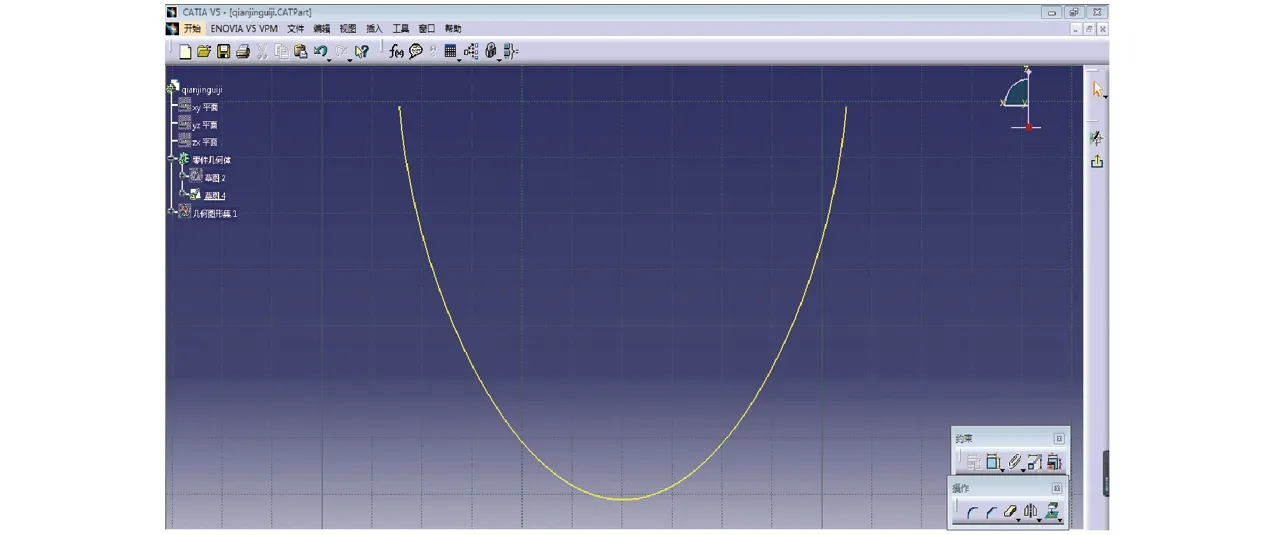
图7 CATIA仿真的轨迹曲线Fig.7 Track curve obtained via CATIA simulation
将图6、7中表示的成型栽植孔外形图和轮廓曲线图按照1∶1的比例放入Word软件中,进行透明化处理,得出2个图中的曲线完全拟合,结果表明成孔机构结构参数与运动参数的设计满足要求。
表1所示为Matlab理论求解成型栽植孔的物理参数。
从表1、图8中理论计算的数据可得出:
(1)相同滑转率的情况下,随着栽植孔深度的加大,栽植孔的纵长逐渐变小。

表1 成型栽植孔物理参数(开口纵长、横上宽度、纵长)Tab.1 Physical parameters of planting hole mm
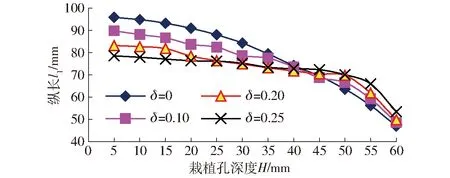
图8 滑转率对栽植孔纵长的影响Fig.8 Influence relation between slip rate and longitudinal length of planting hole
(2)不同的滑转率对栽植孔的物理参数(纵长)影响较大,随着滑转率的增大,栽植孔上部的纵长逐渐变小,而下部的纵长逐渐变大。
(3)栽植孔的深度达到60 mm时,当滑转率小于0.2时,其纵长全部小于50 mm;而栽植孔深度为55 mm时,在不同滑转率的情况下其纵长全部大于50 mm。
理论分析得出,成孔机构成型的栽植孔满足设计要求。
4 田间试验
4.1 试验条件
为了验证上述设计方法的准确性和栽植孔成型机工作的可靠性,试制样机(图9)进行田间试验。试验场地分别为湖南农业大学试验农场、湖南农业大学种植基地、益阳赫山区龙岭工业园,试验场地及土壤相关参数如表2所示。试验田要求表面土壤比较平整,土壤中含有较少的秸秆、稻草等杂物;试验过程中机器以慢2挡(1.85~1.96 km/h)行驶。

图9 试验样机Fig.9 Test prototype
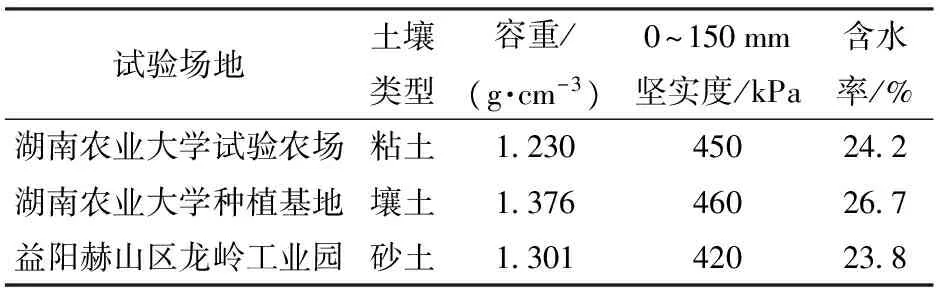
表2 试验场地及土壤相关参数Tab.2 Test field and soil parameters
4.2 试验方法
试验在3种不同类型土壤中进行,每种土壤中进行4次重复试验,每次需测定工作时间、孔距、孔周边土壤下陷深度h1、孔开口纵长L0、孔上部横上宽度L1、有效深度L2等参数[20]。
工作时间:机具的起步与停止过程中工作速度不稳定,每次试验在机器运行的35 m中选择中间段20 m进行标定,用秒表记录标定的20 m内机器运行的时间记为工作时间。
孔距:规定同一行上相邻2个栽植孔中心距为孔距;连续测定单次20 m距离内所有相邻栽植孔的孔距,取平均值作为1次试验的孔距。
孔周边土壤下陷深度h1:测定单次20 m距离内所有栽植孔的周边土壤整体下陷深度,取平均值作为1次试验的孔周边土壤下陷深度。
开口纵长L0:将栽植孔上部端面沿着机器前进方向均分4处,用游标卡尺测量其长度取平均值为其开口纵长;试验时测定单次20 m距离内所有栽植孔的开口纵长,取平均值作为1次试验的开口纵长。
孔上部横上宽度L1:将栽植孔上部端面垂直于机器前进方向均分4处,用游标卡尺测量其长度取平均值为其横上宽度;试验时测定单次20 m距离内所有栽植孔的横上宽度,取平均值作为1次试验的孔上部横上宽度。

根据现场测定的指标计算出机具的性能参数:合格成孔率w0、成孔频率f0、作业效率η。
合格成孔率w0为

(8)
式中N1——测定距离内的理论成孔数量
每次试验测定距离为20 m,而栽植孔的行距为300 mm,每次成孔5行,株距为200 mm,故单次试验测定的理论成孔数为500个。
成孔频率f0(机具每分钟形成栽植孔的个数)为

(9)
式中N3——测定距离内形成栽植孔数量,个
T——成孔工作时间,s
作业效率η为
(10)
式中s——试验设计测定距离,每次测定20 m
B0——厢面总宽,取1 700 mm
4.3 结果与讨论
图10所示为试验成孔效果图。栽植孔成型机的试验结果如表3所示,因试验数据采集工作长度为20 m,结合表中工作时间可得到机具实际前进速度为1.80~1.96 km/h,机具的作业效率达到0.306~0.333 hm2/h,满足配套移栽机工作效率设计要求。
黏土、壤土和砂土3种类型(后续描述3种类型土壤均按此顺序)土壤中,孔距在199.6~200.4 mm之间,均值分别为199.9、200.0、200.1 mm,其变化范围很小,表明在含水率较低的情况下,机具在上述3种类型的土壤中作业其滑转率均接近零,机具稳定性好。
试验测定3种类型土壤中,栽植孔周边表层土壤下陷深度依次增加,其均值分别达到13.5、14.8、15.2 mm,且其变化幅度较大,分别为12.4~15.7 mm、12.8~16.9 mm、12.7~17.8 mm,表明压土板作用于不同类型的土壤其效果差别较大。

图10 试验照片Fig.10 Photos of test
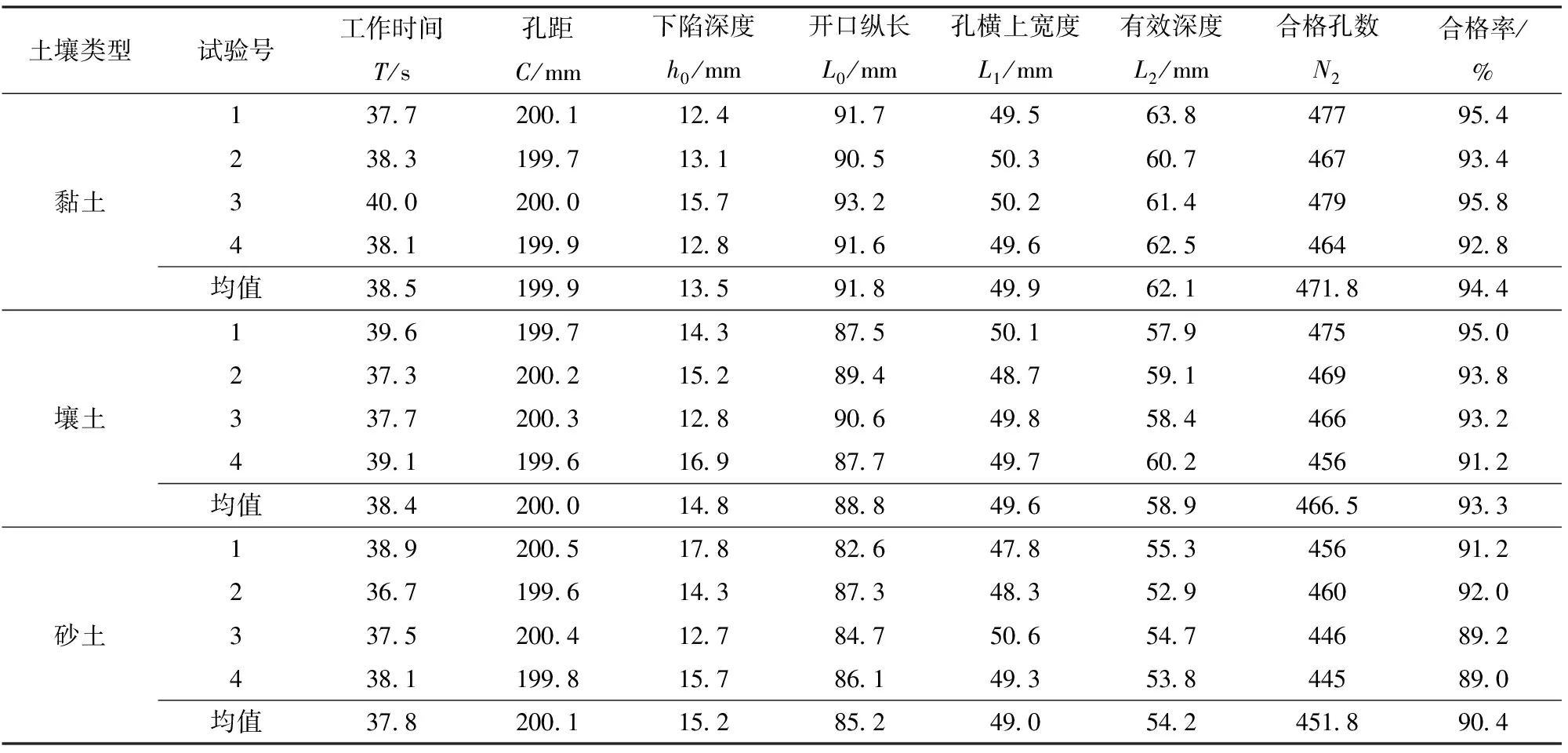
表3 试验结果Tab.3 Field test result
试验测定3种类型土壤中作业数据,孔上部横上宽度均值分别为49.9、49.6、49.0 mm,主要原因是,在柱形孔刺拔出土壤过程中,栽植孔周边土壤不平整,致使孔上部横上宽度均没有达到50 mm的理论数值,但实测数据仍然满足生产需要。
测定结果显示在3种类型土壤中作业时,其孔开口纵长分别在90.5~93.2 mm、87.5~90.6 mm、82.6~87.3 mm之间,其均值分别为91.8、88.8、85.2 mm,主要原因是,机具作业时,压土板下压土壤使得栽植孔周边的土壤下陷一定高度,故孔上部开口纵长是从下陷深度处测得,同时随着柱形孔刺拔出土壤过程中,栽植孔周边土壤不平整,试验测定中的数据均小于理论数值(96.5 mm)。
试验中测定3种类型土壤中,栽植孔有效深度分别在60.7~63.8 mm、57.9~60.2 mm、52.9~55.3 mm之间,主要原因是,当孔刺拔出土壤过程中,栽植孔周边仍然有少部分土壤回填至栽植孔中,致使所形成栽植孔有效深度有所不同,3种类型土壤中栽植孔平均有效深度分别为62.1、58.9、54.2 mm,不同类型土壤中成型栽植孔有效深度差异性较大,表明不同类型土壤的破碎率不同,土壤回填情况不一,但有效深度均超过50 mm,满足设计要求。
3种类型土壤中试验结果显示,栽植孔的合格率分别在92.8%~95.8%、91.2%~95.0%、89.0%~92.0%的范围内变化,变化幅度较小,表明机具工作稳定性较好,多次试验成孔的总平均合格率分别为94.4%、93.3%、90.4%,达到了设计要求。
5 结论
(1)基于成孔移栽作业的工作特点,融合油菜移栽农艺要求,设计了一种纯滚动式油菜移栽栽植孔成型机。该机器通过成孔机构的孔刺周期性地刺入、拔出土壤,而在土壤中形成一系列规则的栽植孔,随后取苗、送苗机构同步配合将幼苗投入到栽植孔内,实施覆土、镇压完成油菜苗的栽植。
(2)通过分析纯滚动式成孔机构运动机理,研究成孔机构的运动参数方程,建立成型栽植孔的参数方程,为关键部件成孔机构的设计提供理论依据。根据机具设计的结构参数、运动参数及参数方程,使用Matlab软件图形绘制程序生成成型栽植孔的外形图,运用CATIA软件进行仿真分析得出成型栽植孔的轮廓曲线图,并将上述图形进行拟合模拟,得出2个图中的曲线完全拟合,验证成孔机构结构参数与运动参数的设计满足要求。
(3)根据设计与仿真优化后的结构参数,试制试验样机进行田间试验。试验结果表明:机具以1.80~1.96 km/h速度作业,其作业效率达到0.306~0.333 hm2/h,3种类型的土壤中,成孔合格率最低的砂土试验中栽植孔合格率达到90.4%,而黏土试验中栽植孔合格率达到94.4%,成型的栽植孔满足设计要求,成孔机构的各项性能指标满足设计要求。
1 于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J/OL].农业机械学报,2014,45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140808&flag=1.DOI: 10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu, ZHAO Yun, CHEN Baocheng, et al.Current situation and prospect of transplanter[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53.(in Chinese)
2 于修刚,袁文胜,吴崇友.我国油菜移栽机研发现状与链夹式移栽机的改进[J].农机化研究,2011,33(1):232-235.
YU Xiugang, YUAN Wensheng, WU Chongyou.Research and development status of the oilseed rapeseed transplanter in China and improvement of clip-chain transplanter[J].Journal of Agricultural Mechanization Research, 2011, 33(1): 232-235.(in Chinese)
3 向伟,吴明亮,徐玉娟,等.幼苗移栽机械研究现状与发展趋势[J].农机化研究,2015,37(8):6-9,19.
XIANG Wei, WU Mingliang, XU Yujuan, et al.Present status and prospects of seedling transplanting machinery[J].Journal of Agricultural Mechanization Research, 2015, 37(8): 6-9,19.(in Chinese)
4 TIAN Subo, QIU Lichun, NAOSHI Kondo, et al.Development of automatic transplanter for plug seedling[J].IFAC Proceedings Volumes, 2010, 43(26):79-82.
5 FELEZI M E, VAHABI S, NARIMAN-ZADEH N.Pareto optimal design of reconfigurable rice seedling transplanting mechanisms using multi-objective genetic algorithm[J].Neural Computing & Applications, 2016, 27(7):1907-1916.
6 KUMAR.Development of a hopper-type planting device for a walk-behind hand-tractor-powered vegetable transplanter[J].Journal of Biosystems Engineering, 2016, 41(1):21-23.
7 NANDEDE B M, RAHEMAN H.Multi-stage metering mechanism for transplanting of vegetable seedlings in paper pots[J].Journal of the Institution of Engineers (India): Series A, 2015, 96(4):295-300.
8 陈达,周丽萍,杨学军.移栽机自动分钵式栽植器机构分析与运动仿真[J].农业机械学报,2011,42(8):54-57,69.
CHEN Da, ZHOU Liping, YANG Xuejun.Mechanism analysis and motion simulation of planting apparatus with automatic distributing bowl mechanism for transplanter[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(8): 54-57, 69.(in Chinese)
9 俞高红,刘炳华,赵匀,等.椭圆齿轮行星轮系蔬菜钵苗自动移栽机构运动机理分析[J].农业机械学报,2011,42(4):53-57.
YU Gaohong, LIU Binghua, ZHAO Yun, et al.Kinematic principle analysis of transplanting mechanism with planetary elliptic gears in automatic vegetable transplanter[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4): 53-57.(in Chinese)
10 周福君,芦杰,杜佳兴.玉米钵苗移栽机圆盘式栽植机构参数优化及试验[J].农业工程学报,2014,30(1):18-24.
ZHOU Fujun, LU Jie, DU Jiaxing.Parameters optimization and experiment of corn-paper transplanting machine with seedling disk[J].Transactions of the CSAE, 2014, 30(1): 18-24.(in Chinese)
11 金鑫,杜新武,耿贵胜,等.2ZDJ-2型钵苗移栽机栽植系统试验[J/OL].农业机械学报,2015,46(12):26-31.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151204&flag=1.DOI: 10.6041 /j.issn.1000-1298.2015.12.004.
JIN Xin, DU Xinwu, GENG Guisheng, et al.Experiment on planting system of 2ZDJ-2 transplanter [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(12):26-31.(in Chinese)
12 石铁.全自动玉米秧苗移栽机的研制与试验[J].农业工程学报,2015,31(3):23-30.
SHI Tie.Development and test of automatic corn seedling transplanter[J].Transactions of the CSAE, 2015, 31(3): 23-30.(in Chinese)
13 吴畏,孙松林,肖名涛,等.2ZY-1型烟草移栽机栽植器的优化设计[J].中国工程机械学报,2012,10(2):166-170.
WU Wei, SUN Songlin, XIAO Mingtao, et al.Optimization design for planter of 2ZY-1 tobacco transplanting machine[J].Chinese Journal of Construction Machinery, 2012, 10(2): 166-170.(in Chinese)
14 胡建平,张建兵,何俊艺,等.移栽机行星轮转臂式栽植器运动分析与试验[J/OL].农业机械学报, 2013,44(10):57-61.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20131010&flag=1.DOI: 10.6041 /j.issn.1000-1298.2013.10.010.
HU Jianping, ZHANG Jianbing, HE Junyi, et al.Motion analysis and experiment for planting mechanism with planetary gears of transplanting machine [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(10):57-61.(in Chinese)
15 王永维,唐燕海,王俊,等.蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J/OL].农业机械学报,2016,47(1):91-100.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160113&flag=1.DOI: 10.6041/j.issn.1000-1298.2016.01.013.
WANG Yongwei, TANG Yanhai, WANG Jun, et al.Parameter optimization for dibble-type planting apparatus of ve gerable pot seedling transplanter in high-speed condition[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 91-100.(in Chinese)
16 赵匀,朱慧轩,辛亮,等.拟合齿轮五杆水稻钵苗移栽机构的机理分析与试验[J].农业工程学报,2016,32(1):12-21.
ZHAO Yun, ZHU Huixuan, XIN Liang, et al.Mechanism analysis and experiment of transplanting mechanism with fitting gear five-bar for rice pot seedling[J].Transactions of the CSAE, 2016, 32(1): 12-21.(in Chinese)
17 徐铭辰,牛媛媛,张开飞,等.吊篮式移栽机关键部件的设计与仿真分析[J].农机化研究,2016,38(2):96-99.
XU Mingchen, NIU Yuanyuan, ZHANG Kaifei, et al.Key institutions design and sumulation analysis of nacelle transplanter[J].Journal of Agricultural Mechanization Research, 2016, 38(2): 96-99.(in Chinese)
18 金鑫,杜新武,杨传华,等.移栽机曲柄滑槽式栽植机构设计与试验[J/OL].农业机械学报, 2016,47(5):83-90.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160512&flag=1.DOI: 10.6041 /j.issn.1000-1298.2016.05.012.
JIN Xin, DU Xinwu, YANG Chuanhua, et al.Design and experiment on crank-chute planting mechanism of transplanting machine[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 83-90.(in Chinese)
19 王晓东.水轮式打穴移栽机成穴机理及试验研究[D].北京: 中国农业大学,2005.
WANG Xiaodong.The experimental study on the water-wheel transplanter’s punching mechanism[D].Beijing: China Agricultural University, 2005.(in Chinese)
20 向伟,吴明亮,官春云,等.履带式油菜苗移栽栽植孔成型机的设计与试验[J].农业工程学报,2015,31(15):12-18.
XIANG Wei, WU Mingliang, GUAN Chunyun, et al.Design and experiment of planting hole-forming device of crawler transplanter for rapeseed (Brassicanapus) seedlings[J].Transactions of the CSAE, 2015, 31(15): 12-18.(in Chinese)
21 佟金,张智泓,陈东辉,等.凸齿镇压器与土壤相互作用的三维动态有限元分析[J].农业工程学报,2014,30(10):48-58.
TONG Jin, ZHANG Zhihong, CHEN Donghui, et al.Three-dimensional dynamic finite element analysis of interaction between toothed wheel and soil[J].Transactions of the CSAE, 2014, 30(10): 48-58.(in Chinese)
22 王金武,张春凤,周文琪,等.基于MATLAB 仿真的非规则齿轮行星系扎穴机构的优化设计[J].农业工程学报,2016,32(3):22-28.
WANG Jinwu, ZHANG Chunfeng, ZHOU Wenqi, et al.Optimization design of non-circular planetary gear trains pricking hole mechanism based on MATLAB[J].Transactions of the CSAE, 2016, 32(3): 22-28.(in Chinese)
23 赵匀,樊福雷,宋志超,等.反转式共轭凸轮蔬菜钵苗移栽机构的设计与仿真[J].农业工程学报,2014,30(14):8-16.
ZHAO Yun, FAN Fulei, SONG Zhichao, et al.Design and simulation of inverted vegetable pot seedling transplanting mechanism with conjugate cam[J].Transactions of the CSAE, 2014, 30(14): 8-16.(in Chinese)
24 姜晨龙,俞国胜.高效深栽造林钻孔机的研制与试验[J].农业工程学报,2013,29(18):75-83.
JIANG Chenlong, YU Guosheng.Development and experiment of efficient deep planting earth auger[J].Transactions of the CSAE, 2013, 29(18): 75-83.(in Chinese)
25 崔巍,赵亮,宋建农,等.吊杯式移栽机栽植器运动学分析与试验[J/OL].农业机械学报, 2012,43(增刊):35-38,34.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s07&flag=1.DOI: 10.6041 /j.issn.1000-1298.2012.S0.007.
CUI Wei, ZHAO Liang, SONG Jiannong, et al.Kinematic analysis and experiment of dibble-type planting devices[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012,43(Supp.):35-38,34.(in Chinese)26 叶秉良,吴国环,俞高红,等.旋转式水稻钵苗移栽机构移栽臂设计与试验[J/OL].农业机械学报,2015,46(7):45-52.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150707&flag=1.DOI: 10.6041 /j.issn.1000-1298.2015.07.007.
YE Bingliang, WU Guohuan, YU Gaohong, et al.Design and test on transplanting arm of rotary transplanting mechanism for rice pot-seedling[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(7):45-52.(in Chinese)
27 刘姣娣,曹卫彬,田东洋,等.基于苗钵力学特性的自动移栽机执行机构参数优化试验[J].农业工程学报,2016,32(16):32-39.
LIU Jiaodi, CAO Weibin, TIAN Dongyang, et al.Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J].Transactions of the CSAE, 2016, 32(16): 32-39.(in Chinese)
28 纪玉杰,于淼,李成华.铲式成穴器性能的离散元仿真[J].江苏大学学报:自然科学版,2014,35(11):40-43.
JI Yujie, YU Miao, LI Chenghua.Simulation analysis of cavitation performance for spade soil opener based on discrete element method[J].Journal of Jiangsu University:Natural Science Edition, 2014,35(11):40-43.(in Chinese)
29 李艳洁,刘翼晨,林剑辉,等.圆锥指数仪贯入沙土过程的三维离散元法模拟[J/OL].农业机械学报, 2012,43(7):63-68.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120711&flag=1.DOI: 10.6041 /j.issn.1000-1298.2012.07.011.
LI Yanjie, LIU Yichen, LIN Jianhui, et al.3D DEM simulations of the cone penetration tests in sandy soil[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012,43(7):63-68.(in Chinese)
30 陈科,杨学军,颜华,等.基于Matlab 的全自动移栽机取苗机构设计与参数优化[J/OL].农业机械学报, 2013,44(增刊1):24-26,32.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s105&flag=1.DOI:10.6041/j.issn.1000-1298.2013.S1.005.
CHEN Ke, YANG Xuejun, YAN Hua, et al.Design and parameter optimization of seedling pick-up mechanism based on Matlab[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1): 24-26,32.(in Chinese)
DesignandTestofTransplantingHole-formingMachineforRapeseedPottedSeedlings
XIANG Wei1,2WU Mingliang1,2GUAN Chunyun2,3HE Yiming1,2LUO Haifeng1,2YAN Bo1,2
(1.CollegeofEngineering,HunanAgriculturalUniversity,Changsha410128,China2.SouthernRegionalCollaborativeInnovationCenterforGrainandOilCropsinChina,Changsha410128,China3.CollegeofAgronomy,HunanAgriculturalUniversity,Changsha410128,China)
In order to design a new rapeseed transplanting machine, a pure rolling-type transplanting hole-forming machine for rapeseed was developed in accordance with agricultural requirements for rapeseed transplanting and the features of transplanting hole formation.The motion mechanism of the pure rolling-type mechanism was analyzed to derive motion parametric equations for the hole-forming mechanism.Matlab was used to generate theoretical contour lines and outline drawings of the transplanting hole.CATIA was then used for simulation analysis to obtain the contour curve of the transplanting hole, and fitting as well as simulation were carried out to verify its structure and motion parameters.Based on different slip rates, Matlab was used to solve formed planting hole physical parameters, such as the longitudinally opening length, longitudinal length of planting hole at the depth ofHand the upper lateral width.Subsequently, prototype trial-production was carried out, followed by field testing.The experimental results obtained indicated that when the machine was in low gear, its forward speed was in the range of 1.80~1.96 km/h and field operation efficiency was in the range of 0.306~0.333 hm2/h.When tested in three types of soil, i.e., clay, loamy and sandy soil, the average qualification rate of hole formation reached 94.4%, 93.3% and 90.4%, respectively.These results confirmed that the developed transplanting hole-forming machine satisfied design requirements, which was significant for the provision of technical support for the design of new transplanters.
rape; transplanting; planting hole; hole forming mechanism
10.6041/j.issn.1000-1298.2017.10.005
S223.92
A
1000-1298(2017)10-0040-09
2017-07-07
2017-08-15
湖南省政府重大专项(湘府阅 [2014]35号)、湖南省科技厅重点项目(2016NK2105)、湖南省科技厅平台建设项目(湘财教指[2014]10号)和湖南省研究生科研创新项目(CX2016B286)
向伟(1986—),男,博士生,主要从事作物生产工程及装备研究,E-mail:xiaobaibaiweiwei@163.com
吴明亮(1972—),男,教授,博士生导师,主要从事农业机械研究,E-mail:mlwu@hunau.edu.cn
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
今日农业(2021年21期)2021-11-26
建材发展导向(2021年20期)2021-11-20
今日农业(2021年14期)2021-10-14
建材发展导向(2021年10期)2021-07-16
建材发展导向(2021年6期)2021-06-09
娃娃乐园·综合智能(2018年3期)2018-03-22
制造技术与机床(2017年5期)2018-01-19
中国卫生标准管理(2015年24期)2016-01-14
中国塑料(2015年5期)2015-10-14
