
复杂光照条件下视觉导引AGV路径提取方法
2017-11-15 09:28李林慧楼佩煌
农业机械学报 2017年10期
武 星 张 颖 李林慧 楼佩煌 何 珍
(南京航空航天大学机电学院,南京 210016)
复杂光照条件下视觉导引AGV路径提取方法
武 星 张 颖 李林慧 楼佩煌 何 珍
(南京航空航天大学机电学院,南京 210016)
针对复杂光照条件下视觉导引AGV的路径提取问题,提出一种基于光照色彩模型的自适应图像照度分区阈值分割方法。首先研究光照照度与图像亮度分量的关系,通过统计复杂光照条件下的图像色彩分布建立光照色彩模型。其次根据光照色彩模型将导引路径图像划分为不同照度区域。然后在RGB色彩空间对低照度区域进行图像增强以还原路径色彩信息,在高亮光区域对色度分量Cb与Cr进行差分运算以抑制共模照度干扰,最后对不同照度区域分别进行自适应阈值分割。大量实验结果表明,在光照环境中同时存在高反光和暗阴影的运行路面,该路径提取方法具有较强的复杂光照适应性,可显著降低在高反光和暗阴影区域的欠分割及过分割误差,对导引路径的识别率为98%。
视觉导引; 路径提取; 图像处理; 阈值分割; 光照色彩模型
引言
自动导引车(Automated guided vehicle,AGV)是一种可沿指定路径自动行驶并在不同工位点之间进行物料搬运的移动机器人,已广泛应用于汽车、电子、仓储和食品等行业的生产物流输送。相比于其它导引方式,视觉导引技术具有路径布局柔性大、测量精度高、设置成本低等优点[1-2],然而机器视觉系统的识别性能易受复杂环境光照变化的影响[3-4],在作业现场复杂多变的光照条件下实现机器视觉系统的稳定可靠运行,是提升视觉导引AGV复杂环境适应性的关键技术。
针对复杂光照条件下的导引路径图像提取问题,李进等[5]采用动态阈值分割方法,具有较好的光照适应性,然而该方法根据已知路径宽度来确定图像分割的阈值,无法适用于导引路径污损导致宽度变化的情况。杨旭等[6]采用色度补偿法解决高光问题,然而只适用于已知光照模型的视觉导引系统。蔡晋辉等[7]将复杂光照条件下的整幅图像划分为若干固定的子区域,通过子区域自适应阈值分割提取路径特征,然而其图像分割效果并不太理想。袁挺等[8]采用基于色彩稳定性分析的方法取得较好的路径提取效果。此外,还有学者尝试采用颜色恒常性、光照无关分量提取等方法解决复杂光照问题[9-10],然而这些方法计算复杂度较高,无法满足AGV视觉导引实时性的要求。在导引路径视觉识别方面,常用方法有Hough变换法、最小均方差法、最小二乘法以及基于曲率角估计的拟合法等[11-17]。这些方法在理想光照环境下的导引精度较高,然而路径识别精度对图像分割错误点较敏感,无法保证复杂光照条件下视觉导引的精确性与可靠性。
本文针对复杂光照环境,提出一种基于光照色彩模型的自适应图像照度分区阈值分割方法。首先根据光照色彩模型在导引路径图像中划分不同照度区域,并对图像的不同照度区域分别进行图像预处理,然后对不同照度图像进行自适应阈值分割,从而实现具有光照适应性的视觉导引路径提取。
1 复杂光照下的路径提取问题
1.1 复杂光照下的路径图像
本文研究的视觉导引AGV以水磨石地面上设置的蓝色色带作为导引路径。在视觉导引AGV的运行过程中,车载摄像机采集导引路径图像时需依靠视觉照明系统提供光照条件。而运行环境中不同地点的光照条件可能不断发生变化,并可能存在地面反光、强光照、暗阴影以及光照突变等各种复杂光照干扰现象,严重影响了车载摄像机所采集的导引路径图像质量。例如,在不同地点、时间和照明光源(包括车载LED光源、室内白炽灯和自然光)的环境中,车载摄像机采集的导引路径图像呈现不同的效果,如图1所示。图像的光照不均匀可以分为两类:一类是因光照不足出现的图像局部亮度值低,细节模糊无法辨认,如图1d所示的阴影区域。一类是物体表面发生反光,出现高光现象,导致图像原始信息丢失且难以提取,如图1c所示的高亮光区域。本文所研究的复杂光照条件就是指由高亮光与暗阴影的随机出现而导致的图像照度及其区域分布的不规则动态变化。随着不同地点、不同时刻的复杂光照动态变化,地面背景与导引路径的颜色特征发生显著变化,路径识别算法的精确性和可靠性受到很大影响。为了保证视觉导引系统的性能稳定性,有必要对复杂光照条件下路径提取问题进行深入研究。

图1 复杂光照条件下的导引路径图像Fig.1 Images of guide paths under complex illumination conditions
1.2 导引路径提取方法
针对作为导引路径的地面蓝色色带,AGV采用彩色模拟CCD摄像机获取逐行倒相(Phase alternating line,PAL)制式的模拟信号,经视频解码器解码,输出8位YCbCr格式的彩色图像到图像处理器,图像分辨率为640像素×480像素。
为消除复杂光照动态变化对导引路径图像质量的影响,首先,研究光照照度与图像亮度分量的关系,并通过统计复杂光照条件下的路径图像色彩分布建立光照色彩模型。其次,根据光照色彩模型确定图像亮度分量Y(x,y)的2个阈值T1和T2,据此将导引路径图像划分为低照度区域、高亮光区域和正常照度区域。再次,将低照度区域的图像从YCbCr色彩空间转换到RGB色彩空间,根据光照色彩模型选取标准照度所对应的图像亮度值并进行图像增强,再将其转换至YCbCr色彩空间;在高亮光区域,根据光照色彩模型对蓝色色度与红色色度分量进行差分运算从而获得色度差分图像。最后,采用最大类间方差(Otsu)的阈值分割算法,分别提取低照度区域和高亮光区域的导引路径;采用固定单阈值分割方法,提取正常照度区域的导引路径,实现具有光照适应性的图像分区阈值分割方法,并同时兼顾了处理方法的时间复杂度。整个导引路径提取方法的处理流程如图2所示。

图2 光照自适应的导引路径提取流程图Fig.2 Flow chart of illumination-adaptive extraction for guide paths
2 基于光照色彩模型的图像照度分区
2.1 光照照度与图像亮度的关系
CCD摄像机成像过程中光电及信号转换原理为
(1)
式中Qin——像素的理论电荷量
gz——光电转换系数
Ee——感光元件表面的辐照度
t——曝光时间Y——图像亮度分量
go——增益系数gs——系数
o——输出直流偏置
σr——输出随机噪声
由式(1)可得感光传感器上的辐照度为

(2)
式中gv——模拟电路前端增益放大器的增益
gt——光电转换系数与模拟电路增益的乘积,对于固定的成像系统,gt为定值
由于随机噪声不可知,故式(2)可进一步改写为

(3)
式中ov——根据gv变化的直流偏置
由于gt的计算相对复杂,当成像系统确定,则gt为定值,因此在应用中不需要计算出gt的值,所以定义传感器的相对辐照度为
(4)
式(4)中第2项是噪声项,相比于第1项其值较小,舍去第2项则式(4)可简化为
(5)
由式(5)可知,传感器的相对照度与图像亮度值的关系仅与增益项和曝光时间有关。对于某一选定的CCD摄像机,其CCD增益和曝光时间是固定的,则传感器的相对照度与图像亮度值存在一定线性关系。秦莉等[18]通过标定系统测得场景点实际照度值与传感器上相对照度值间的关系。利用式(5)可计算出实际照度与图像亮度之间关系为

(6)
其中,a、b为标定系数,其值取决于发光表面与摄像机之间的距离。在实际应用中,摄像机一般固定安装,其到地面的距离保持不变,a、b均可看成固定值。

图3 亮度分量与照度关系曲线Fig.3 Relationship curves between brightness and luminance
为验证上述理论,采用彩色模拟CCD摄像头,通过采集不同照度条件下的路径图像,利用照度计测量光心位置实际照度值E,并计算图像对应光心位置处的亮度Y,图3为3次重复实验的数据结果。实验过程中,照度条件为0~1 100 lx。由图3可知,图像亮度在50~255之间对应的照度条件为0~900 lx,在此区间内,图像亮度与摄像机视野内照度存在近似线性相关关系。因此,可利用图像亮度分量对图像照度进行评定,研究图像色彩随图像亮度变化而呈现不同特性,无需考虑成像系统中复杂的反射系数等因素。
2.2 光照色彩模型
在车载摄像机采集的YCbCr格式的导引路径图像中,蓝色色带与地面背景在蓝色色度分量Cb上差异较大,且分量Cb对光照有一定的聚类特性,易于路径提取,故直接在YCbCr色彩空间对路径图像进行识别。YCbCr与RGB色彩空间的转换公式为[19]
(7)
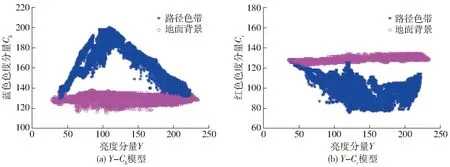
图4 光照色彩模型Fig.4 Illumination color models
从理论上看,在YCbCr色彩空间中,蓝色色度与红色色度分量均具有一定的聚类特性,且与光照条件变化无关[20],然而在现实中这种特性却会受到光照影响。根据式(5),光照照度与图像亮度成一定线性关系,故这种影响可以量化地由图像亮度来表征。随着亮度分量Y的变化,色度分量的聚类特性会呈现一种非线性变化趋势。
为研究复杂光照条件下图像的色彩特性,采集不同光照条件下的路径图像300幅。在YCbCr色彩空间,针对每一幅图像的地面背景和导引路径部分,选取光照不均匀区域的像素点,分别统计其色度分量Cb和Cr与亮度分量Y的相关分布,结果如图4所示,数据变化趋势反映了色度分量与图像亮度的相关程度。
由图4所示的光照色彩模型可知,导引路径的蓝色色度分量值基本上大于地面背景,导引路径的红色色度分量值基本上小于地面背景;地面背景的蓝色色度和红色色度分量值基本处于110~140区间段;随着图像亮度变化,蓝色色度和红色色度分量呈现不同的变化趋势,但仍存在一定的聚类特性。分析路径图像Y-Cb子空间分布图可知,亮度在35~55区间段以及180~230区间段所对应的照度条件下,导引路径与地面背景的蓝色色度分量值均较接近,不易于提取路径特征;亮度在55~180区域段所对应的照度条件下,导引路径与地面背景的蓝色色度分量值存在明显差异。分析路径图像Y-Cr子空间分布图可知,亮度大于145的区间段所对应的照度条件下,导引路径与地面背景的红色色度分量值存在明显的差异;亮度小于145的区间段所对应的照度条件下,两者的红色色度分量值相近。因此,可将路径图像的亮度在35~55区间段所对应的照度条件定义为低照度,将亮度在180~230区间段所对应的照度条件定义为高亮光,将亮度在55~180区间段所对应的照度条件定义为正常照度,从而将55和180两个亮度作为各个照度区域划分的阈值。
2.3 图像照度分区
一帧图像中可能包含有高亮光区域、低照度区域及正常照度区域,在不同区域,目标图像表达不一致,导致路径无法完整提取,路径视觉识别结果出现较大误差。文献[19]选取15像素×15像素固定大小的基本单元对不同照度的图像进行分区,但由于高亮光区域或低照度区域的大小及形状随机出现,按此方法划分极易将不同照度的像素划分为同一块区域。针对此问题,本文提出一种基于光照色彩模型的自适应图像照度动态分区方法,主要步骤如下:
(1)设置2个阈值T1、T2,根据光照色彩模型可知T1=55、T2=180。
(2)根据
(8)
(9)
式中Y(i,j)——像素点(i,j)处亮度分量
g(i,j)、h(i,j)——二值化后像素点(i,j)处灰度
对原始图像的分量Y进行2次阈值分割,输出2幅图像,然后分别对2幅图像进行如下处理。
(3)先对二值图像做一次10像素×10像素的开运算,消除较小的非目标连通区域,再进行连通区域检测。
图5为复杂光照条件下导引路径图像的自适应照度动态分区的实验结果。图5a为含有高亮光的导引路径图像,经过阈值分割和连通区域检测得到如图5d所示的高亮光区域。图5e为含有暗阴影的导引路径图像,图5h为处理得到的低照度区域。
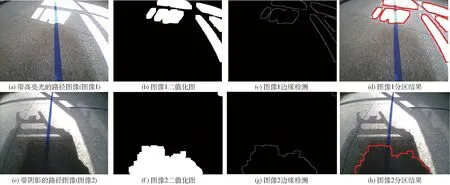
图5 图像分区结果Fig.5 Results of image partitioning
3 分区图像自适应阈值分割
3.1 正常照度区域
图像二值化的常用方法包括迭代最优阈值、最大类间方差(Otsu)、固定单阈值及固定多阈值分割方法等。基于2.2节对复杂光照条件下光照色彩模型的分析,本文采用分区图像自适应阈值分割方法。对于正常照度区域,导引路径与地面背景的蓝色色度分量值存在较大差异。导引路径的蓝色色度分量值在160以上,而地面背景的蓝色色度分量值保持在140以下,适合采用固定单阈值分割方法,阈值Tmid在145~155之间分割效果均较佳。本文设定Tmid=148,固定单阈值分割为
(10)
式中Cb(i,j)——像素点(i,j)处蓝色色度
G(i,j)——二值化结果
3.2 低照度区域
在图4所示的光照色彩模型中,对于由于阴影或照度低而导致的低照度区域,导引路径与地面背景无论是蓝色色度分量还是红色色度分量都较为接近,难以正常提取图像中的导引路径。为此,首先对低照度区域进行图像增强处理,然后采用最大类间方差(Otsu)法对增强后的图像区域进行阈值分割。图像增强的目标是将低照度下质量较差的失真图像恢复到标准照度条件下的正常图像,因此选取合适的标准照度,是保证通过图像增强有效恢复路径信息的关键。
具体的图像增强方法为:首先利用式(7)将低照度区域图像从YCbCr色彩空间转换至RGB色彩空间;再根据实际照度分布与标准照度的比例关系,分别从R、G、B3个通道对低照度像素点的色彩分量进行相应比例的放大增强,公式为
IZ(i,j)=I(i,j)Kexp(-Y(i,j)/Ymid)
(11)
式中I(i,j)——原始图像中像素点(i,j)处R、G、B3个分量中的某一分量
IZ(i,j)——图像增强后像素点(i,j)处的相应R、G、B分量
K——增强比例系数
Ymid——选取的标准照度

以图6a为例,先将图像转换至RGB色彩空间,采用式(11)对低照度图像进行增强,实验结果如图6b所示。图像增强后存在散点噪声,对图像阈值分割的影响较大,再进行一次3像素×3像素的中值滤波处理,降低噪声干扰,实验结果对比如图6c、6d所示。其次在YCbCr空间,采用Otsu阈值分割算法分别对原始低照度图像和增强后图像进行二值化,实验结果对比如图6e、6f所示。最后对图1d所示的整幅导引路径图像分区并进行增强处理,实验结果如图7所示。可见,基于光照色彩模型的自适应阈值分割方法在低照度区域可获得良好的路径提取结果。
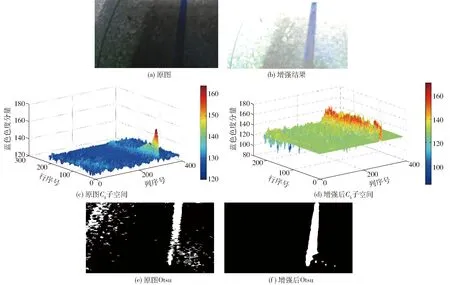
图6 低照度区域预处理结果Fig.6 Preprocessing results of low illumination regions

图7 整幅图像预处理结果Fig.7 Preprocessing results of a whole image
3.3 高亮光区域
高光反射现象描述了被拍摄物体表面的光学特性,在图像中高亮光表现为像素的亮度分量值高,致使物体颜色改变、轮廓失真,进而给视觉识别带来困难。然而,不同材质物体表面的高光会表现不同特性,目前并没有一种能够有效处理各种材质表面高光的统一算法。由图4所示的光照色彩模型可知,高亮光区域中的导引路径与地面背景在蓝色色度分量上区分不明显,主要是由于导引路径的蓝色色度分量在高亮光区域迅速下降。然而,导引路径的红色色度分量在高亮光区域也有下降趋势,蓝色色度与红色色度分量之差在高亮光区域相对稳定。如果将高亮度光照视为一种同时影响色度分量Cb和Cr的共模干扰,则通过对色度分量Cb和Cr进行差分运算可有效抑制这种共模干扰。因此,对高亮光区域进行色度差分运算,将YCbCr色彩空间的图像转换到差分YCbCr色彩空间,公式为
ΔS(i,j)=Cb(i,j)-Cr(i,j)
(12)
式中 ΔS(i,j)——原始图像的蓝色色度与红色色度分量的差分分量
Cr(i,j)——原始图像的红色色度分量
针对不同光照条件下采集的300幅路径图像,在差分YCbCr色彩空间,统计差分色度分量ΔS(i,j)与亮度分量Y的相关分布,如图8所示。可见,导引路径与地面背景在差分色度分量上具有明显的差异,易于区分。因此,可在差分YCbCr色彩空间对导引路径图像采用Otsu阈值分割算法,提取高亮光区域的路径信息。
以图9a为例,利用式(12)求其差分色度图像。图9b、9c分别为路径图像在Cb子空间和差分色度空间的分布情况,采用Otsu阈值分割算法分别对蓝色色度分量和差分色度分量进行二值化处理,结果分别如图9d、9e所示。对比分割效果可知,基于差分YCbCr色彩空间的自适应阈值分割方法在高亮光区域获得了良好的路径提取结果。

图8 光照差分色度模型Fig.8 Model of differential chromaticity with respect to illumination

图9 高亮光区域预处理结果Fig.9 Preprocessing results of high illumination regions
4 实验结果与分析
为验证本文所提方法的有效性,利用视觉导引AGV前置倾斜安装的彩色模拟CCD摄像机,在各种复杂光照条件下,采集路径图像150幅作为实验样本。根据光照条件分为3类:低照度图像,高亮光图像,兼有低照度及高亮光区域的图像,每类光照条件包括50幅样本图像,图像分辨率为640像素×480像素。在Matlab实验平台上进行图像处理,分别采用固定单阈值分割、最大类间方差(Otsu)阈值分割以及本文的自适应图像照度分区阈值分割方法,从3类样本图像中提取导引路径并生成二值化结果,再选取3类具有典型光照条件的路径图像进行对比分析,图像处理结果如图10所示。上述3种方法进行图像分割的阈值以及从图像背景中提取导引路径的目标像素等实验数据如表1所示。
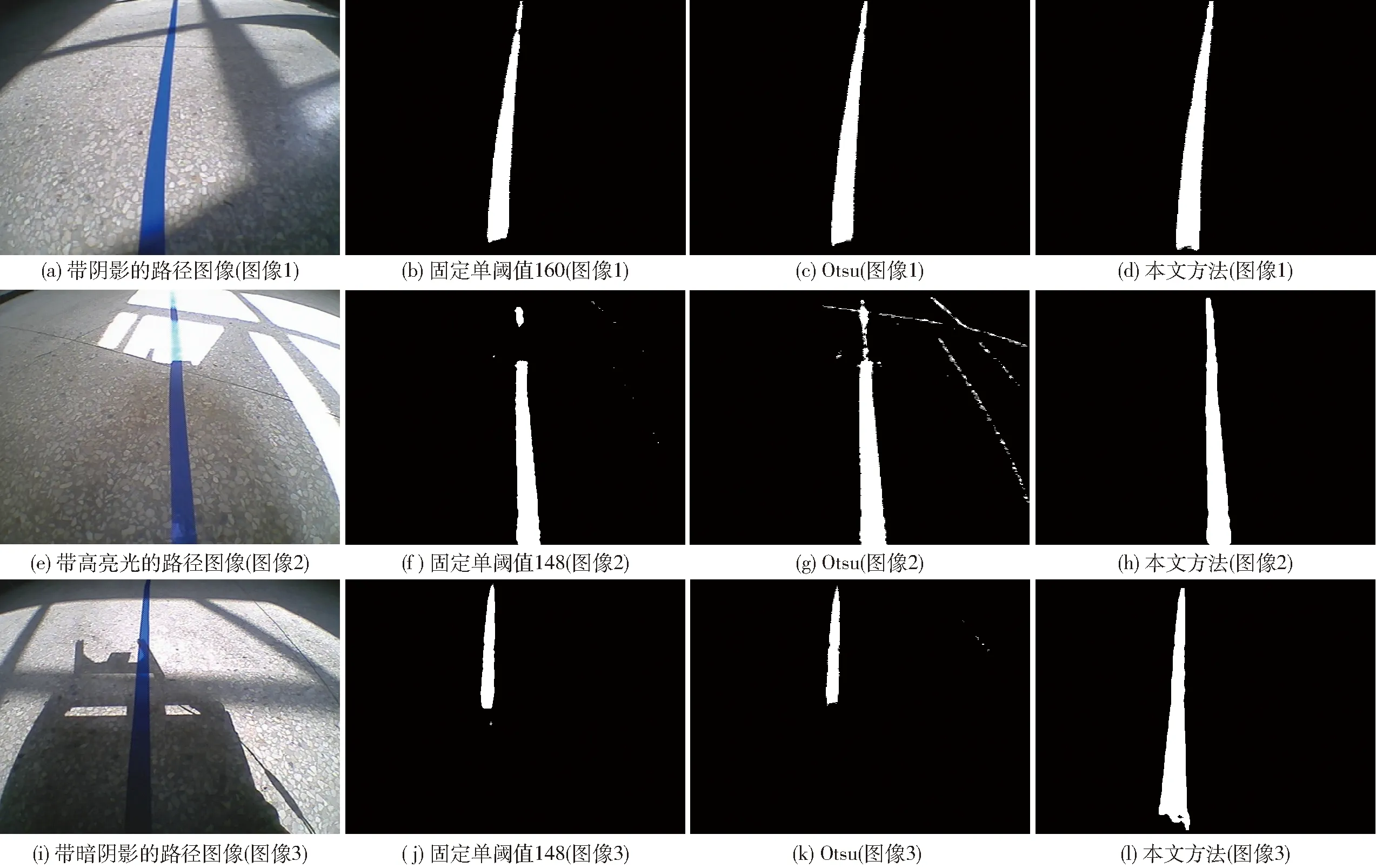
图10 路径提取对比实验Fig.10 Experimental comparisons of path extraction
图10a为带阴影的路径图像,窗户边框的投影横穿导引路径,然而阴影区域的照度不是很低。此时,Otsu阈值分割和固定阈值分割均能取得较好的路径提取效果。固定阈值分割的算法实时性较高,且其阈值具有一定的鲁棒性,根据光照色彩模型确定的分割阈值为148,即使图10b采用阈值160具有一定的偏差,然而在正常照度区域仍然可取得较好的路径提取效果。表1中数据也显示出这3种方法所提取导引路径的目标像素数大致相同。
图10e为带高亮光的路径图像,透过窗户的强烈阳光照射在导引路径上,部分导引路径上的光照强度非常大,高亮光区域的路径图像严重丢失原有的色彩信息。此时,固定阈值分割方法所提取的导引路径上方存在明显的图像缺失,如图10f所示。Otsu阈值分割方法虽然能从高亮光区域提取很细的导引路径,但其宽度明显小于正常路径宽度,且导引路径右侧出现多条很细的疑似路径干扰,如图10g所示。只有本文的自适应图像照度分区阈值分割方法既能从高亮光区域提取正常宽度的导引路径,又能避免导引路径右侧的条形高光区域所产生的疑似路径干扰,如图10h所示。表1中数据显示:固定阈值分割方法所提取导引路径的目标像素数少于后两种方法,Otsu阈值分割方法所提取的目标像素数略多于本文方法,因为它将导引路径右侧的条形高光区域也误识别为导引路径。
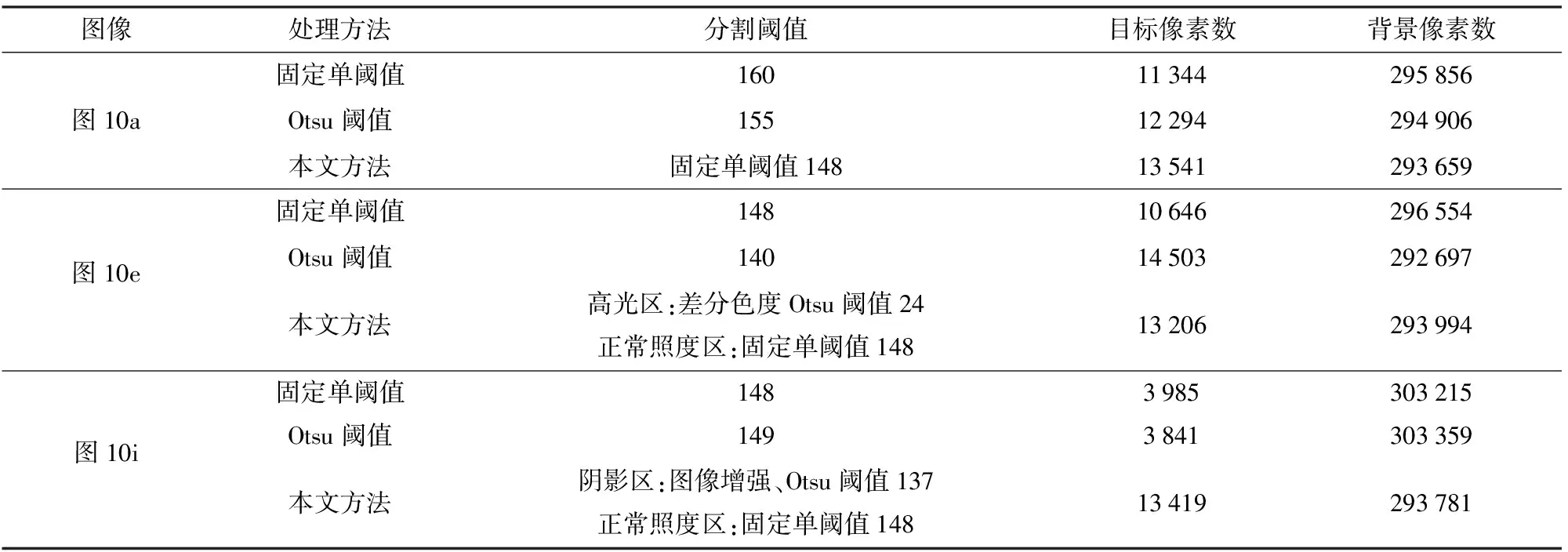
表1 图像分割实验数据Tab.1 Experimental data for image segmentation
图10i为带暗阴影的路径图像,导引路径处于环境物体的黑暗阴影中,暗阴影区域的路径图像细节模糊无法辨认。此时,单阈值分割和Otsu阈值分割方法所提取的导引路径下方存在大部分的图像缺失,如图10j、10k所示。只有本文的自适应图像照度分区阈值分割方法能从暗阴影区域成功提取导引路径,仅存在很小的图像缺失,如图10l所示。表1中数据显示:本文方法所提取导引路径的目标像素数明显多于前两种方法,有效克服了暗阴影对路径识别的不利影响。
为进一步评价本文所提方法的路径提取效果,现定义两种图像分割的误差率:一种是将图像中路径像素误识别为背景像素的欠分割误差率F-,另一种是将图像中背景像素误识别为路径像素的过分割误差率F+。设图像背景像素总数为Nb,真实路径的像素数量为Np,将路径像素误识别为背景像素的数量为Nle,将背景像素误识别为路径像素的数量为Nte,则两种分割误差率为

(13)
(14)
在每幅图像中,设路径提取方法识别的路径像素数量为Nld,则每幅图像中导引路径的像素识别率为
(15)
根据光照条件将采集的150幅路径图像分为低照度、高亮光、兼有低照度及高亮光3组。一方面,针对每组50幅图像,利用本文的自适应图像照度分区阈值分割方法提取导引路径的二值化结果,再对照真实路径像素统计阈值分割出现错误的像素数,并针对识别错误的类型计算上述定义的两种分割误差率,统计结果如表2所示。另一方面,针对每组50幅图像(Mt=50),统计路径像素识别率大于96%的图像数量Mp,则每组图像中导引路径的图像识别率为

ηg=×100% (16)
由表2可知,本文的路径提取方法仍然具有一定的识别误差。针对低照度条件的50幅图像,仅有1.82%的欠分割误差率,所有图像都能达到96%的路径像素识别率。针对高亮光条件的50幅图像,同时有1.54%的欠分割误差率和2.20%的过分割误差率,98%的图像能达到96%的路径像素识别率。针对兼有低照度及高亮光条件的50幅图像,同时有2.13%的欠分割误差率和2.10%的过分割误差率,98%的图像能达到96%的路径像素识别率。识别误差仍然存在的原因为:环境光照的方向和强弱变化在导引路径的周围形成的阴影过暗或强光反射过强,导致路径图像细节模糊或轮廓边缘完全改变,在图像增强或色度差分过程中无法完全恢复原有的路径信息,不可避免地存在欠分割及过分割误差。然而,后续的路径识别方法在拟合导引路径时还可以进一步消除分割错误点,针对上述150幅实验样本,本文的路径提取方法可达98%的路径识别率,这将为后续的路径拟合提供足够的精度。
5 结束语
为解决复杂光照条件下视觉导引路径的精确提取问题,提出了一种基于光照色彩模型的自适应图像照度分区阈值分割方法。研究了光照照度与图像亮度的关系,并在YCBCr色彩空间建立了复杂光照条件下导引路径图像光照色彩模型。根据此模型将图像划分为不同照度区域:针对正常照度区域,采用固定单阈值分割算法能高效精确提取路径信息;针对低照度区域,先在RGB色彩空间采用图像增强算法以还原路径色彩信息,然后将增强后的图像区域转换至YCbCr色彩空间;针对高亮光区域,对图像进行色度差分运算以抑制共模照度干扰;再采用Otsu阈值分割算法分别提取高亮光区域和低照度区域的路径信息。大量实验结果表明,在光照环境中同时存在高反光和暗阴影的运行路面,本文提出的路径提取方法具有较强的复杂光照适应性,对导引路径的识别率为98%。
1 MILJKOVIC Z, VUKOVIC N, MITIC M, et al.New hybrid vision-based control approach for automated guided vehicles[J].The International Journal of Advanced Manufacturing Technology, 2013, 66(1-4): 231-249.
2 WU Xing, LOU Peihuang, YU Jun, et al.Intersection recognition and guide-path selection for a vision-based AGV in a bidirectional flow network[J].International Journal of Advanced Robotic Systems, 2014, 11(39): 1-17.
3 CHOI H C, OH S Y.Illumination invariant lane color recognition by using road color reference and neural networks[C]∥The 2010 International Joint Conference on Neural Networks(IJCNN), 2010: 18-23.
4 YI S K, HARALICK R M, SHAPIRO L G.Optimal sensor and light source positioning for machine vision[J].Computer Vision and Image Understanding, 1995, 61(1): 122-137.
5 李进, 陈杰平, 徐朝胜, 等.基于动态图像阈值的智能车辆路径导航[J/OL].农业机械学报, 2013, 44(4): 39-44.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130407&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.04.007.
LI Jin, CHEN Jieping, XU Chaosheng, et al.Path tracking of intelligent vehicle based on dynamic image threshold [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4):39-44.(in Chinese)
6 杨旭, 楼佩煌, 武星, 等.基于光照约束的AGV视觉导引非均匀光照增强方法[J].机械科学与技术, 2013, 32(12): 1752-1757.
YANG Xu, LOU Peihuang, WU Xing, et al.A method for enhancing non-uniform illumination of vision-guided automatic guided vehicle with illumination constraints[J].Mechanical Science and Technology for Aerospace Engineering, 2013, 32(12): 1752-1757.(in Chinese)
7 蔡晋辉, 才辉, 张光新, 等.复杂环境下自动导引车路径识别算法[J].农业机械学报, 2011, 42(10): 20-24.
CAI Jinhui,CAI Hui,ZHANG Guangxin, et al.Guidance line identification algorithm for AGV in complex environment [J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 20-24.(in Chinese)
8 袁挺, 任永新, 李伟, 等.基于光照色彩稳定性分析的温室机器人导航信息获取[J/OL].农业机械学报, 2012, 43(10):161-166.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121029&flag=1.DOI:10.6041 /j.issn.1000-1298.2012.10.029.
YUAN Ting,REN Yongxin,LI Wei, et al.Navigation information acquisition based on illumination chromaticity stability analysis for greenhouse robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(10): 161-166.(in Chinese)
9 安秋, 李志臣, 姬长英, 等.基于光照无关图的农业机器人视觉导航算法[J].农业工程学报, 2009, 25(11): 208-212.
AN Qiu, LI Zhichen, JI Changying, et al.Agricultural robot vision navigation algorithm based on illumination invariant image[J].Transactions of the CSAE, 2009, 25(11): 208-212.(in Chinese)
10 FINLAYSON G D, HORDLEY S, LU C, et al.On the removal of shadows from images[J].IEEE Trans.on Pattern Analysis and Machine Intelligence, 2006, 28(1): 59-68.
11 王新忠, 韩旭, 毛罕平,等.基于最小二乘法的温室番茄垄间视觉导航路径检测[J/OL].农业机械学报, 2012, 43(6): 161-166.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120629&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2012.06.029.
WANG Xinzhong, HAN Xu, MAO Hanping, et al.Navigation line detection of tomato ridges in greenhouse based on least square method[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 161-166.(in Chinese)
12 ILLINGWORTH J, KITTLER J.A survey of the Hough transform[J].Computer Vision, Graphics and Images Processing, 1988, 44(1): 87-116.
13 KUANG P, ZHU Q X, LIU G C.Real-time road lane recognition using fuzzy reasoning for AGV vision system[C]∥Int.Conf.on Communications Circuits and Systems, IEEE, 2004, 2: 989-993.
14 GONG J W, WANG A S, ZHAI Y.High speed lane recognition under complex road conditions[C]∥2008 IEEE Intelligent Vehicles Symposium, 2008: 566-570.
15 武星, 沈伟良, 楼佩煌, 等.视觉导引AGV鲁棒特征识别与精确路径跟踪研究[J/OL].农业机械学报, 2016, 47(7): 48-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160708&flag=1.DOI:10.6041/j.issn.1000-1298.2016.07.008.
WU Xing, SHEN Weiliang, LOU Peihuang, et al.Robust feature recognition and precise path tracking for vision-guided AGV[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 48-56.(in Chinese)
16 喻俊, 楼佩煌, 钱晓明,等.自动导引车视觉导引路径的识别及精确测量[J].华南理工大学学报:自然科学版, 2012, 40(3): 143-149.
YU Jun, LOU Peihuang, QIAN Xiaoming, et al.Recognition and accurate measurement of vision-guided path of automatic guided vehicle[J].Journal of South China University of Technology: Natural Science Edition, 2012, 40(3): 143-149.(in Chinese)
17 CHEN G H, ZHOU W, WANG F J, et al.Lane detection based on improved canny detector and least square fitting[J].Advanced Materials Research, 2013, 765-767: 2383-2387.
18 秦莉, 董丽丽, 许文海, 等.CCD图像灰度与照度的转换标定方法[J].仪器仪表学报, 2015, 36(3): 639-644.
QIN Li, DONG Lili,XU Wenhai, et al.Method for conversion calibration between CCD image gray value and illumination[J].Chinese Journal of Scientific Instrument, 2015, 36(3): 639-644.(in Chinese)
19 LIN C.Face detection in complicated backgrounds and different illumination conditions by using YCbCr color[J].Pattern Recognition Letters, 2007, 28(16): 2190-2200.
20 孟庆宽, 张漫, 杨耿煌,等.自然光照下基于粒子群算法的农业机械导航路径识别[J/OL].农业机械学报, 2016, 47(6):11-20.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160602&flag=1.DOI:10.6041/j.issn.1000-1298.2016.06.002.
MENG Qingkuan,ZHANG Man,YANG Genghuang, et al.Guidance line recognition of agricultural machinery based on particle swarm optimization under natural illumination[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6):11-20.(in Chinese)
PathExtractionMethodofVision-guidedAGVunderComplexIlluminationConditions
WU Xing ZHANG Ying LI Linhui LOU Peihuang HE Zhen
(CollegeofMechanicalandElectricalEngineering,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China)
An adaptive image illumination partitioning and threshold segmentation approach based on a model of illumination and color was proposed for path extraction in the field of view for a vision-guided AGV under complex illumination conditions.Firstly, the relation between light illumination and image brightness was analyzed, and the correlation model of illumination and color was built by measuring color distribution with respect to different illuminations in images under complex illumination conditions.Secondly, the image of a guide path was partitioned into different illumination regions according to the model of illumination and color.Then the image of low-illumination region was enhanced in the space of RGB color to retrieve the color information of the guide path, and the image of high-illumination region was processed by differentiating chrominance components ofCbandCrto suppress the common-mode luminance interference.Finally, an adaptive threshold segmentation method was performed for different illumination regions.A large number of experimental results showed that this path extraction approach had high adaptability to complex illumination when recognizing the guide path in the vision field with both high-reflective and dark-shadow regions caused by the environment illumination, and it achieved the recognition accuracy of 98% owing to decreasing the errors of under-segmentation and over-segmentation in high-reflective and dark-shadow regions significantly.
vision guidance; path extraction; image processing; threshold segmentation; illumination color model
10.6041/j.issn.1000-1298.2017.10.002
TP242
A
1000-1298(2017)10-0015-10
2017-02-27
2017-04-01
国家自然科学基金项目(61105114)、中国博士后科学基金项目(2015M580421)、江苏省科技支撑计划项目(BE2014137)、江苏省博士后科研计划项目(1501103C)、江苏省产学研前瞻性联合研究项目(BY2015003-11)和中央高校基本科研业务费项目(NS2016050)
武星(1982—),男,副教授,主要从事移动机器人导航控制和计算机视觉研究,E-mail: wustar5353@nuaa.edu.cn
猜你喜欢
中国机械工程(2022年8期)2022-05-09
儿童时代·幸福宝宝(2021年1期)2021-03-29
小资CHIC!ELEGANCE(2019年40期)2019-12-10
酿酒科技(2019年7期)2019-07-30
照明工程学报(2018年3期)2018-08-03
照明工程学报(2017年3期)2017-07-10
中国生物医学工程学报(2017年6期)2017-02-10
文物保护与考古科学(2016年4期)2016-05-17
质谱学报(2015年5期)2015-03-01
Defence Technology(2012年3期)2012-07-25
