
基于DSP和TDE算法的智能声控垃圾桶设计
2017-11-14 13:42王勇王梨英
电脑知识与技术 2017年29期
王勇+王梨英
摘要:智能家居系统得到越来越广泛的应用,但是在家居系统中的垃圾桶,暂时还没有实现智能化设计,在行动不便或老弱群体使用过程中存在诸多不便。该文基于DSP硬件平台和TDE算法,设计了一款智能声控垃圾桶装置。在硬件设计中,主要完成了声音识别模块、声源定位模块、四轮电机驱动模块以及避障模块;软件设计主要采用延时估计法(Time Delay Estimation,TDE),在此基础上,完成了特定语音识别算法、声源定位算法与方位估计,设计完成后,设计了六个垃圾桶站位置,通过控制,对用户与垃圾桶中轴的角度和偏移距离以及语音指令进行实验,反应灵敏,精确度高,能实现“随叫随到”,具有良好的应用前景。
关键词:智能家居;延时估算;声源定位;语音识别
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2017)29-0170-02
Abstract: Home Furnishing intelligent system has been more and more widely used, but in the Home Furnishing system in the trash, no intelligent design, there are a lot of inconvenience in action or inconvenience in the process of using the old and infirm. Based on DSP hardware platform and TDE algorithm, this paper designs an intelligent sound control garbage can device. In the hardware design, mainly to complete the voice recognition module, sound source positioning module, four wheel motor driving module, obstacle avoidance module; software design mainly uses time delay estimation method (Time Delay Estimation, TDE), on this basis, completed the estimation of specific speech recognition algorithm, sound source localization algorithm and range, after the completion of the design six, design a trash station position, through the control of the user, and the trash axis angle and offset distance and voice commands for experiment, sensitive reaction, high accuracy, can achieve "on call", has good application prospects.
Key words: Smart home, time delay estimation, source localization, speech recognition
智能家居系統越来越受到人们的青睐,家居系统已经向智能化、科学化和人性化发展。家居系统中一个比较容易疏忽的垃圾处理桶,一般情况下固定、或特定设置在某些地方,但是如果考虑到老人、孕妇或者有残疾的病人在处理时,存在诸多不便,设计一款可以语音控制的垃圾桶,则显得尤为重要。基于此,本文基于DSP硬件平台和TDE算法,设计了一款智能声控垃圾桶装置,当有人需要扔垃圾时,只要通过语音则可以控制垃圾桶,准确到达需要垃圾桶到达的位置,从而实现给不方便人群带来极大的便利。
1 系统设计
系统整体设计框图如图1所示。其工作原理是:首先语音识别模块语音命令,识别后会通过声源模块确定发声者的定位,然后通过DSP发出电机驱动信号驱动垃圾桶向声源方向前进,系统设置有避障系统,会左右转,直到到达目的地。
2 软件算法设计
软件算法中,最核心的问题是语音识别和识别后对声源的准确定位问题。其中包括各传声器与声源之间在传输过程中的时间误差计算以及根据声源定位后,垃圾桶在到达声源目的地过程中的轨迹航道误差计算两大问题。
2.1 TDE算法
设计的环境不可能是一个完全没有任何噪声的环境,选取两个传声器和一个声源作为研究对象,假设两传声器之间的距离为d,设声波从声源到传声器的衰减系数分别为,环境噪声信号分别用函数表示,则两传声器接受到的信号和为:
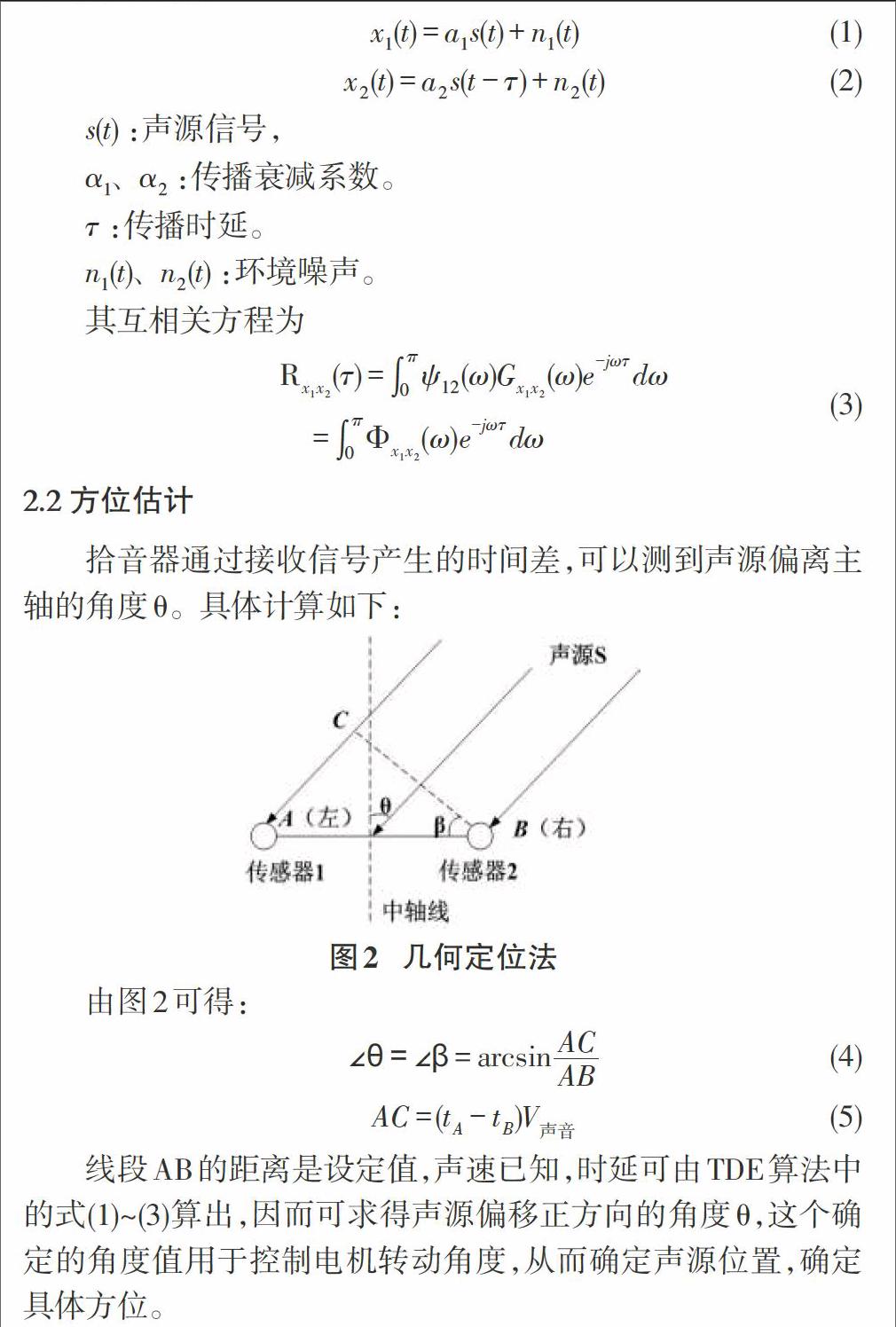
2.2 方位估计
拾音器通过接收信号产生的时间差,可以测到声源偏离主轴的角度θ。具体计算如下:
由图2可得:
线段AB的距离是设定值,声速已知,时延可由TDE算法中的式(1)~(3)算出,因而可求得声源偏移正方向的角度θ,这个确定的角度值用于控制电机转动角度,从而确定声源位置,确定具体方位。
2.3 特定语音识别算法
处理过程分为滤波和预加重处理、采用相关函数,对特定语音采集处理采用最相近处理模式,最后通过匹配后输出结果。相关函数的处理主要是为了解决现实情况下,未知信号与标准的语音信号之间存在必然的误差,采用标准化类似程度匹配。此外预加重是其中一个非常重要的环节,通过提高频谱分量,准确找出标准语音和采集信号之间的差异,为后面模式匹配奠定基础。图3为SPCE061A识别过程。endprint
3 系統软件设计
根据前面整体的硬件设计和系统要求,软件总流程图如图4所示。
3 系统软件设计
根据前面整体的硬件设计和系统要求,软件总流程图如图4所示。
4 测试
测试模式图如图4所示:
用户相对垃圾桶所站的六个测试位置如图4所示,其中用户距离垃圾桶的直线距离均大于4米。测试结果显示,达到用户身边的最大误差值不超过20cm,对用户的指令接受准确率达到95%以上。
5 结论
该文经过对智能垃圾桶的硬件系统和软件系统进行了整体的设计,并且在设计完成的基础上,进行了达到距离的测试和语音识别的准确度测试,实验结果显示,距离准确度高,语音识别准,可以达到设计的功能要求,结果可行。
参考文献:
[1] 石健将.李荣贵.张平,等.基于新型电压电流双闭环控制的轴带发电机PWM整流器研究[J]. 电工技术学报,2014,6(29):189-193.
[2] 李金鹏.基于不可控整流的单相PFC研究[J]. 电子技术,2014,4(4):12-15.
[3] 方志聪.基于FFT变换的电网谐波分析及其仿真研究[J]. 电气应用,2014,4(33):68-70.
[4] 黄蔷.基于SVPWM变流技术的电池检测系统的仿真研究[J]. 电源技术应用,2014(1):96-97.
[5] 陈明.三相整流设备晶闸管选用研究及功率因数分析[J]. 电气工程应用,2013(1):23-25.
[6] 张石.一种大功率可控整流电路的控制方法[J]. 电源技术,2012(12):1938-1940.
[7] 瞿博.吕征宇. 三相电压型PWM整流器小信号建模及其控制器设计[J].电工技术学报,2010,25(5):103-108.
[8] 张兴.张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[9] Rusong Wu,Shashi B Dewan.Analysis of an AC/DC voltage source converter using PWM with phase and amplitude control[J].IEEE Transactions on Industrial Application, 1991.27(2):355-363
[10] 倪靖猛,方宇,邢岩,等. 基于优化负载电流前馈控制的400HZ三相PWM航空整流器[J].电工技术学报,2011,26(2):141-146.
[11] 钟炎平,沈颂华.PWM整流器的一种快速电流控制方法[J].中国电机工程学报,2005,25(12):52-56.endprint
猜你喜欢
电子制作(2019年20期)2019-12-04
中国公共安全(2017年5期)2017-09-04
中国新通信(2016年21期)2017-01-06
工业设计(2016年10期)2016-04-16
现代电子技术(2015年11期)2015-07-28
河南科技(2014年7期)2014-02-27
