机器人离线编程技术现状及前景展望
2017-11-09 06:59:32介党阳胡昭琳刘霖平
装备机械 2017年3期
□介党阳 □寇 萌 □胡昭琳 □刘霖平
北京宇航系统工程研究所 北京 100076
机器人离线编程技术现状及前景展望
□介党阳 □寇 萌 □胡昭琳 □刘霖平
北京宇航系统工程研究所 北京 100076
离线编程技术可以大幅节省制造时间,实现复杂机器人系统的时序仿真,并为机器人编程和调试提供灵活的编程环境,成为当前机器人领域的研究热点。介绍了机器人离线编程技术的组成和应用现状,并对应用前景进行了展望。
机器人;离线编程;现状;发展
1 研究背景
工业机器人的应用程度是反映一个国家工业自动化水平的重要标志,近年来,我国机器人市场需求在快速增长,并已成为全球机器人应用的重要市场。2014年,我国工业机器人销量达到5.6万台,同比增长52%,再次成为全球最大工业机器人应用市场。在珠三角地区,工业机器人应用的年均增长速度已达到30%,尤其在装配、点胶、搬运、焊接等领域,已经掀起了一股工业机器人的使用热潮。尽管如此,我国制造业使用工业机器人的密度仍然很低。2013年,我国工业机器人密度仅为每万名产业工人30台,不足全球平均水平的一半,与工业自动化程度较高的韩国每万名产业工人437台、日本每万名产业工人323台和德国每万名产业工人282台相比差距较大[1],因此,我国工业机器人应用市场有巨大发展空间。
目前,采用机器人制造已经成为各大数控加工企业的发展方向,但是受限于现有机器人编程的耗时长和成本高,还没有大量应用。
如何降低工业机器人的编程调试门槛,缩短客户定制化任务的设计改造时间,实现工业机器人的去编程或易编程,已成为当前机器人领域最活跃与最前沿的研究课题[2-7]。传统的示教器和示教编程已经在工业生产线上应用了半个世纪之久,甚至仍然是当前应用和操作机器人的最主要手段和途径,随着普及应用,弊端和不足也愈发明显,主要表现如下[8]。
(1)示教编程需要在工作现场进行作业,作业的同时生产线上的所有设备都必须停工,生产效率损失极大。
(2)示教编程不太适用于运动轨迹过于复杂或精度要求较高的应用场合。
(3)示教编程对于一些需要根据外部信息进行实时决策的应用无能为力,比如多机器人联合作业等。
近年来,国内外许多大中型企业都装备了自动化加工设备和计算机辅助设备与系统[9]。同时,计算机辅助设计(CAD)和计算机辅助制造(CAM)技术已趋于成熟,其高效便捷的建模手段和集成技术,成为工业机器人编程中的有力工具。这些设备和系统为工业机器人离线编程技术的研究和推广提供了基本的硬件和软件条件。与传统示教编程相比,离线编程系统具有如下优点[10]。
(1)大幅减少了机器人的停机时间,当对下一个任务进行编程时,机器人可仍在生产线上工作。
(2)使编程者可在远离危险的工作环境中编程和调试,改善了编程环境。
(3)便于和CAD、CAM系统结合,借助机器人厂家提供的丰富离线数据库,对多种机器人进行编程和时序优化,开展全系统联合仿真。
(4)可应用高级计算机编程语言对复杂任务进行编程,便于修改机器人程序,降低机器人编程难度。
因此,笔者在介绍机器人离线编程技术现状时,着重总结目前世界上广泛应用的离线编程软件系统,并从去编程和易编程的要求出发,对机器人离线编程技术的前景进行展望。
2 离线编程技术流程
离线编程技术利用CAD建模技术生成的工作空间模型对机器人控制程序进行编程,在程序下载到工业机器人驱动器之前,可以离线对运动的轨迹、时序等重要特征进行仿真。机器人离线编程技术流程如图1所示[11]。
3 离线编程技术组成要素
3.1 CAD建模

图1 机器人离线编程技术流程
CAD建模需要完成的任务如下:①零件建模;②设备建模;③系统设计和布置;④几何模型图形处理。因为应用现有CAD数据及机器人理论结构参数所构建的机器人模型与实际模型之间存在误差,所以必须对机器人进行标定,对其误差进行测量、分析及不断校正。随着机器人应用领域的不断扩大,机器人作业环境的不确定性对机器人作业任务有着十分重要的影响,固定不变的环境模型是不够的,极可能会导致机器人作业的失败。因此,如何实时确定机器人作业环境,并以此动态修改环境模型,是机器人离线编程系统实用化的一个重要问题。
3.2 目标特征识别
这个过程包括从操作目标的三维模型中提取出特征路径,根据所采用的末端执行器的坐标位置,生成机械臂末端运动的路径点。这个过程要求离线编程系统能够从目标的边、角等特征中自动识别出特征曲线,以减小编程量。此外,初始点、进给点和退出点等特征点需要人为指定。
3.3 轨迹规划
根据识别的目标特征,自动生成轨迹。通常根据机器人逆运动学计算出来的轨迹可能不止一条,具体应用时还需要根据具体的空间可达性、避障性能,以及最小化构型转换等要求,由操作者来选择或通过优化目标函数来选择。
3.4 工艺流程规划
对于处理复杂工艺的情形,尤其是多机器人协同操作的场合,需要通过离线编程系统规划出详细的动作时序和路径,避免干涉和碰撞,同时优化各个参数,提高生产效率。
3.5 流程仿真
流程仿真是离线编程系统的一大优势,通过流程仿真可提前发现程序中不协调的项目,事先直观获知机器人运动过程,减少占用生产线的时间。
3.6 后置处理
后置处理的主要任务是将离线编程的源程序编译为机器人控制系统能够识别的目标程序。当作业程序的仿真结果完全达到作业要求后,将该作业程序转换成目标机器人的控制程序和数据,并通过通信接口下载到目标机器人控制柜,驱动机器人去完成指定的工作任务。
3.7 标定
在理想情况下,由离线编程技术建立的模型应同机器人实际模型完全一致。在传感器匹配的情况下,由离线编程系统生成的程序可直接下载至机器人系统中执行工作任务。实际上,由于模型和真实系统间存在差别,在实际应用中需要对离线编程系统的结果进行标定和修正。因此,标定时间至关重要,一方面会影响到机器人的实际工作效果,另一方面占用了机器人生产线的时间,所以应尽可能缩短标定时间。
4 离线编程软件系统
国内外的离线编程软件,按照设计用途大致可以分为两类:通用型离线编程软件和专用型离线编程软件。
4.1 通用型离线编程软件
通用型离线编程软件通常都由第三方软件公司负责开发和维护,可支持多款机器人的仿真、轨迹编程和后置输出。这类软件优缺点很明显,优点是可支持多款机器人,缺点是对某一特定品牌的机器人的支持力度不如专用型离线编程软件大。
典型的通用型离线编程软件及其特征见表1。
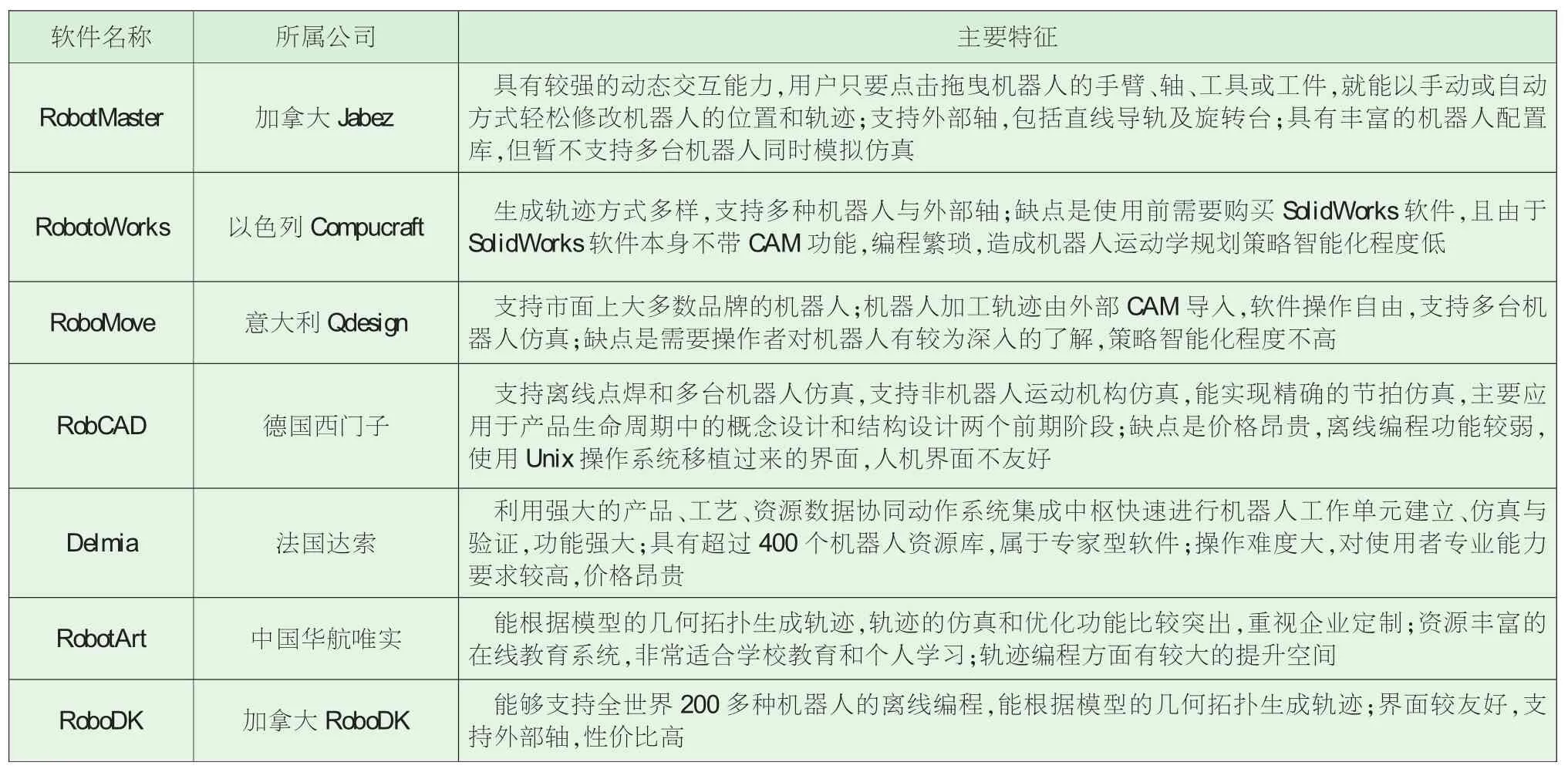
表1 典型通用型离线编程软件及特征
4.2 专用型离线编程软件
专用型离线编程软件通常由机器人本体厂家自行或委托第三方软件公司开发及维护,这类软件通常只支持本品牌的机器人仿真、编程和后置输出。由于开发人员可以接触机器人底层数据通信接口,所以这类离线编程软件有更强大和实用的功能,与机器人本体兼容性也更好。
典型的专用型离线编程软件及其特征见表2。
5 前景分析与展望
离线编程技术因其能够大幅减少机器人的停机时间,对多种机器人进行编程和时序优化,开展全系统联合仿真,降低机器人编程难度,已经成为当前机器人领域的一个研究热点。但即便如此,离线编程技术在应用时仍需要一定的专业基础,不能做到真正的傻瓜编程。同时,由于各个生产厂家接口不一,通用型离线编程软件在通用性和专业性方面较难平衡。离线编程软件与以下几个方面的建设和发展息息相关。
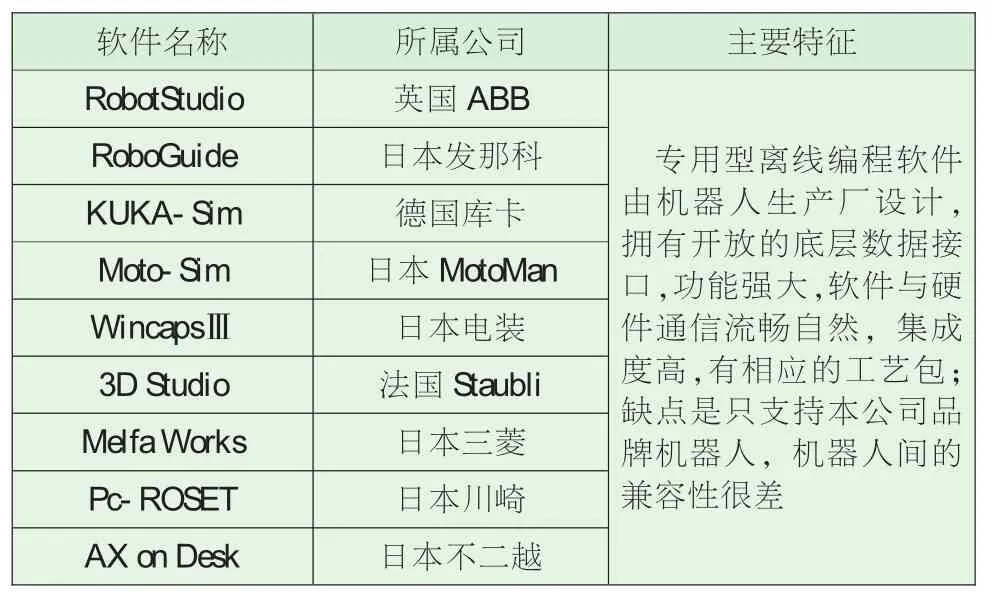
表2 典型专用型离线编程软件及特征
5.1 机器人标准化
离线编程技术的发展与机器人行业标准的完善和推广息息相关。目前世界上知名的机器人公司有20多家,使用相对比较普及的工业机器人有超过200种,然而目前工业机器人行业标准通过国际标准化组织认证的却为数不多,且已有的几项标准也多为近几年认证的。涉及到工业机器人机械接口的ISO9409系列标准目前也仅通过了一项子标准,尚没有与机器人控制接口函数相关的国际标准。各个机器人生产厂商控制接口函数和编程语言的多样化,对通用性离线编程软件的接口通用化造成了很大的困难,实际上不利于离线编程技术的推广。
5.2 开源平台建设
近年来,机器人开源操作系统的发展为复杂机器人系统的开发提供了一个开放、高效的平台,降低了世界上很多机器人系统的开发门槛,同时极大地提高了机器人系统的开发效率。离线编程技术因其直接决定机器人的易用性和开发周期,同样急需建立一个世界性的开源设计平台,使离线编程技术能够如机器人驱动和控制一样,成为设计师的一项普遍使用且熟练掌握的通用技术,这也是提高离线编程技术实用性的有效手段。
5.3 机器人客户与生产商之间的商业机会
虽然离线编程技术已经使编程变得直观,但开发起来其专业性仍较强。对于购买工业机器人的客户而言,他们更希望看到有专业的开发团队来负责实现企业自身的定制,因为生产线改造有较强的非周期性,而为此配置一个专业的开发团队成本较高。而对于机器人生产厂商而言,若能够将处理机器人售后调试及后续二次开发的工作分离出去,集中优势力量来研发更符合市场需求的机器人本体也不失为一个不错的选择。
6 结论
机器人离线编程技术是解决工业机器人巨大市场推广需求与编程过程效率低下的现实矛盾的有效工具,其强大的CAD、CAM支持能力,能够很好地实现复杂系统的编程调试,其较好的仿真能力增加了编程的直观性,可有效减少占用生产线的时间。随着近年来工业机器人标准的制定,以及越来越多高效设计平台的推广,机器人离线编程技术一定能在未来有较大提高和发展前景。
[1]工信部装备工业司.《中国制造2005》推动机器人发展[J].机器人技术与应用,2015( 3):31-33.
[2] 赵臣,王刚.我国工业机器人产业发展的现状调研报告[J].机器人技术与应用,2009( 2):8-13.
[3] 薛苏杭,黄建民.未来展示技术中的机器人[J].装备机械,2010( 1) :2-7.
[4] 戚纪良.机器人在科普展项中的应用[J].装备机械,2007( 4):55-57.
[5] 魏振红,俞港,付庄,等.基于RobCAD软件的焊接机器人离线编程[J].机电一体化,2015( 3):31-34.
[6] 郭小宝,赵振,陈落根.码垛机器人运动学几何解法的研究[J].装备机械,2015( 4):44-47.
[7] 邱焕能,林仕高,欧元贤.机器人操作臂离线编程仿真系统[J].机床与液压, 2015,43( 21):28-31.
[8] 张爱红,张秋菊.机器人示教编程方法[J].组合机床与自动化加工技术,2003( 4):47-49.
[9] 宁文正,郭帅,鲍晟,等.面向移动加工的机器人路径规划关键技术研究与应用[J].机械制造,2016,54(9):22-25,29.
[10]任倩,王树国,陈祥立,等.基于虚拟现实的机器人离线编程技术的研究[J].机器人,2003,25( 2):172-177.
[11]PAN Z X,POLDEN J,LARKIN N,et al.Recent Progresson Programming Methods for Industrial Robots[C].Robotics(ISR),2010 41st International Symposium on and 2010 6th GermanConferenceonRobotics( ROBOTIK),Munich,2011.
Offlineprogrammingtechnology can saveproduction timegreatly,realizethetiming simulation of complex robot system,and provide a flexible programming environment for robot programming and debugging which becomes the research hotspot in the field of robot.Introduced the composition of offline programming technology of robot and itspresent statusof applicationswhiletheapplicationswereprospected.
Robot;Offline Programming;Present Status;Development
TH164;TG659
A
1672-0555(2017)03-054-04
2017年1月
介党阳(1984—),男,博士,高级工程师,主要从事机器人与运载火箭发射技术研究工作
(编辑:平 平)
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
中国特种设备安全(2021年11期)2021-05-05 06:13:18
少先队活动(2021年2期)2021-03-29 05:41:04
汽车维修与保养(2021年8期)2021-02-16 00:28:30
铁道通信信号(2020年6期)2020-09-21 09:23:34
学生天地(2020年17期)2020-08-25 09:28:48
湖北农机化(2020年4期)2020-07-24 09:07:44
数学大王·低年级(2020年3期)2020-03-12 04:48:48
中成药(2018年2期)2018-05-09 07:20:09
电子技术与软件工程(2017年1期)2017-03-06 22:01:12