
管道机器人的设计与制作
2017-11-08 05:47江汉大学物理与信息工程学院周敬龙熊高文陈徵豪
电子世界 2017年20期
江汉大学物理与信息工程学院 周敬龙 章 红 熊高文 陈徵豪 王 鼎
管道机器人的设计与制作
江汉大学物理与信息工程学院 周敬龙 章 红 熊高文 陈徵豪 王 鼎
针对诸多行业面临管道内部环境难以监控以及清洁维护的问题,本设计主要完成管道机器人的设计与制作。管道机器人主要由行进机构、监控机构、控制机构、无线遥控机构、清洁机构和供电机构等组成。32位微控制器MK60作为主控模块,控制实现机器人的各种动作;采用WiFi网络摄像头,可以在手机端显示机器人采集到的管道内部的实时环境信息;利用LoRa无线传输模块实现无线通信,同时结合基于Qt开发的PC机遥控系统,可以远程遥控管道机器人在管道内部自由灵活的行进,并执行清洁、维护的指令。
管道机器人;wifi网络摄像头;无线遥控;上位机
1.引言
目前,在许多行业(比如石油业、核工业、中央空调)中,管道的使用数量快速的增长,但是管道在使用过程中会因为压力、侵蚀等外来作用,对管道的使用造成一定的影响,特别在核工业,尤其需要定期检测和安全评估管道内部环境,防止安全事故的发生.但是管道所处环境十分复杂,而且用户不方便进入管道内部工作,这就需要管道机器人代替用户进入管道内部进行清洁、维护等工作,并将管道内部实时环境信息反馈至上位机或者手机端,让用户能够实时的了解管道内部环境。
2.管道机器人系统设计方案
本设计的管道机器人主要由几个部分组成,分别是机器人主控、供电机构、无线摇控、进行机构、监控机构和清洁机构。
2.1 电路设计
2.1.1 电源管理模块电路设计
本设计选用的是7.2V/2000mA的镍—铬电池供电,而电机驱动电路、摄像头需要5V供电,MCU、液晶屏以及LoRa模块是3.3V供电,所以选用了LM2940和AMS1117两款稳压芯片来调节电压,其中LM2940将7.2V转换成5V,AMS1117将5V转换成。
2.1.2 主控电路设计
本设计选用的Freescale的32位微控制器MK60DN512 ZVLL10,接口资源如表1所示:
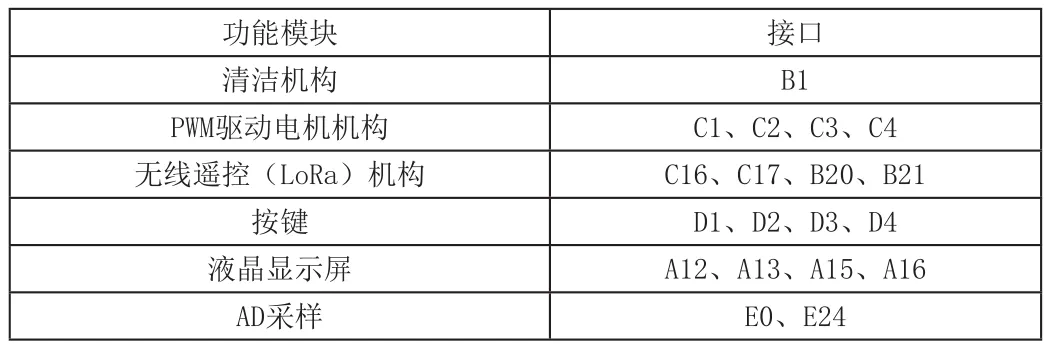
表1 接口资源表
电路板总体电路设计的PCB 3D视图如图1所示:
图1主控电路板总体设计PCB图
2.1.3 驱动电路设计
机器人使用的电机型号是33GB-520-18.7, 由于电机的供电电压是DC6-12V,较为稳定,为了增大驱动电流,达到良好的驱动能力,本设计制作的基于MOS管驱动,其中包括由74HC08构成的隔离电路和HIP4082组成的驱动部分,以及由4片MOS管组成的全桥电路,承载电流超过10A,可以高效率发挥电机性能。
2.2 软件设计
2.2.1 基于Qt的PC端机器人无线控制系统的UI界面设计
为了实现机器人无线控制的多样化,并能够在PC端控制操作机器人的需求,本设计利用跨平台的QT软件开发了一套能够在PC端控制机器人的应用程序。PC端机器人无线控制系统是通过操作PC机上的串口,利用串口通信以及LoRa无线传输,来实现对机器人无线控制。串口是PC机上一种通用的设备通信协议,而串口通信是指外设和PC机之间,通过控制线、数据信号线、VCC、GND等,按位进行数据信息传输的一种通信模式。其中,数据位、波特率、奇偶校验位、停止位是串口通信最关键的配置参数信息。对于两个需要进行通信的串口,这些参数必须匹配正确无误。无线控制系统UI界面如图2所示:

图2 PC端机器人无线控制系统的UI界面
2.2.2 无线通信程序设计
由于无线传输的稳定性及传输距离、误码率等问题,我们将nrf2401、蓝牙模块、LoRa、WIFI模块四种常用的无线通信模块对比后,最终选用了LoRa。LoRa 是LPWAN通信技术中的一种,是美国Semtech公司采用和推广的一种基于扩频技术的超远距离无线传输方案。LoRaWAN是 LoRa联盟推出的一个基于开源的MAC层协议的低功耗广域网标准。这一技术可以为电池供电的无线设备提供局域、全国或全球的网络。
2.2.3 机器人控制程序设计
为了简化机器人的机械结构,本设计放弃了传统的转向舵机作为机器人行进机构的方法,而是采用两个电机,配合差速来实现机器人的控制,控制电机的信号为PWM。

图3 管道机器人
3.测试结果
用户可以在遥控器和上位机两套控制机构下操作机器人,机器人在接收到用户发送的指令后,可以在管道内灵活的行进,并完成管道清洁和维护等相关操作。其次,用户可以在智能手机端接收到机器人上wifi网络摄像头反馈至APP上的实时管道环境信息,实现监控的功能。当管道发生异常或者破裂等情形,机器人会给出报警,提示用户及时处理,防止危险事故的发生。管道机器人如图3所示:
4.总结
用管道机器人代替用户进行工作,首先,可以提升操作的安全性,可以实时监测环境,保证人身安全;其次,可以提高工作的便捷性。因为管道一般口径较小,人无法进入工作,采用上位机和无线通信技术,可以方便快捷的进行信息传递和数据交流。因此,利用管道机器人代替人工操作是十分有必要的。同时,随着人工智能时代的不断发展,对于机器人这类智能产品的需求也越来越大。
[1]谢学刚.基于Qt5.0的机器人上位机系统的设计[D].东北农业大学,2016.
[2]杨林.工业机器人机械设计方法与机器人算法研究[D].五邑大学,2013.
[3]林以敏.机器人制作[M].北京:机械工业出版社,2008.
[4]汤卿.仿人机器人设计及步行控制方法[D].浙江大学,2009.
[5]孔德杰.电子线路设计的基本方法[J].家庭电子,2005,22:56.
猜你喜欢
无线互联科技(2021年4期)2021-04-21
装备制造技术(2020年11期)2021-01-26
电子制作(2019年16期)2019-09-27
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2019年23期)2019-02-23
电子制作(2018年23期)2018-12-26
电子制作(2016年15期)2017-01-15
厦门理工学院学报(2016年1期)2016-12-01
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
