
基于多重算法的机车换道模型设计初探
2017-11-08 05:46江西省煤炭工业科学研究所胡小勇
电子世界 2017年20期
江西省煤炭工业科学研究所 胡小勇
基于多重算法的机车换道模型设计初探
江西省煤炭工业科学研究所 胡小勇
利用三维图形技术设计,采用多种神经网络算法,简易实现了发车模型,为现实安全执法、风险评估提供科学指导,能为实际工程中的一项具有实际意义的理论分析工具设计理论指导。
智能系统;神经网络算法;变量;模型;输入输出;换道模型;OpenGL三维
1.引言
智能系统是大数据系统开发应用的一个分支范畴,是一个集合研究涵盖多学科和协调组织,调研、可行性、研发、组织质控的大系统。现代科技技术为智能系统的研发和发展,提供可行性和多选择的方向手段。
智能系统既分整体特性的宏观,又分个体事件微观,是一门运用多学科、多领域、多范畴特性的综合性系统。国家建立大数据系统,为智能系统研究提供了一个平台,能综合利用先进的技术手段和数据支撑,为系统实现,增添更多理论模型和方法参考,且能模拟和拓展,并使用大数据综合平台和方法来检验设想和假设的可能性,最终得到实验的结果,为实际工程开发或是项目实施节省费用和时间。
本文着重阐述神经网络的汽车换道模型设计和实现,为智能系统中分支部分提供一种可行性方法指导。
2.构建基于算法实现换道设计的模型
人工智能网络算法的应用,在一些实际项目研发和软体开发中占有不可比拟的位置:一是采用多方位,多层次的模拟传感器监测;二就是用总体模拟神经网络,采用多种算法实现特定功能和范畴内汽车的动态变化。
分析在正常行驶或是非正常行驶的状态是最为重要的信息,首先需要把行驶环境附近的空间、环境、三维立体等事件统称为障碍物(可能也是汽车),假如前方、后方、左右、上下有障碍物,这样障碍物相对于行驶的位置就比较重要,第二个重要的信息事件就是障碍物是在行驶物体的前方还是后方或是右边,还是在左边,还是在上下空间中。如果行驶状态物体两边有障碍物,那么行驶物体可以加速或是减速进行判别,如果前方有障碍物,那么行驶物体必须要刹车减慢速度并且在允许可能的条件下转弯或是左右变道紧急避让,因此需要更换行驶物体的方向来达到换道的情况。
综上所述,模型算法因此确定多个输入和多个输出,多个输出分别为上下面、左边、右边、前后和中间,而输出则分为转向的方向和适度转向角度、以及加速度矢量方向和速率。这些矢量和定量必需要跟算法及跟进模型紧密联系起来,输入输出的变量都是对应每一个行驶状态下物体而言,换言之就是要对每一个行驶状态和跟进的行进物体进行汇总计算。
(1)变量输入
变量输入被定义为前方、后方、左边,右边,上下立体及中间,实际上是前后、左中右、上下空间等障碍物离当前正常行驶物体的位置,对于测算距离用神经网络算法模块将全部信息数据可以量化在0-1.0之间的浮点数,这些和随机动态生成器有关,模拟的随机动态生成器的统一输出为0-1.0之间,无论是在什么算法模块和神经网络模块中都是使用相同的随机动态生成器,这样可以提高模块的复用性。变量输入被量化成为一组数据信息矩阵VISION[3],前后、上下、左右中等障碍物离行驶物体的距离及环境信息事件数据可以分别存储在VISION[0],VISION[1],VISION[2]等数据信息矩阵里面。因此必需要了解对象的位置值V[x,y]二维,环境视力范畴值r,此值在特定算法模块中模拟产生的。视力范畴有两个重要作用,一是为了方便算法的计算速度,在视力范畴内的所有事件物体都需要计算,假如在视力范畴内的没有事件物体,则表示没有障碍物。二是方便量化,算法计算距离变化值VISION是把视力范畴内的事件离行驶物体的距离除以视力范畴,则得到了0-1.0之间的标准量化。图1所示是变量输入量化示意图。
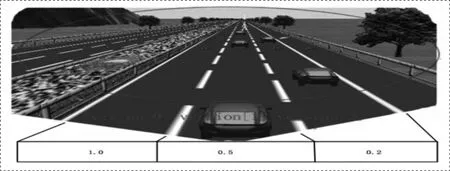
图1 变量输入量化示意图
(2)变量输出
变量输出有多个,转向的方向和适度转向角度、以及加速度矢量方向和速率,在行驶跟进的情况下,转向的方向的角度为0,加速度矢量仍然保持为行驶跟进模型的定义。当然前面所说的变化换道原理生成换道时,例如前方、后方、左右、及上下中间有障碍,控制行驶状态物体依据突发事件信息得到的概率感觉前方、后方、左右、上下中间行进物体速速及速率快慢,神经网络算法模型应该输出的是0-1.0之间随机被变化的角度修正值和矢量加速度。
如图2所示,环境道路与变化道路之间的线用ax+bz+c=0表示。因此行驶状态物体一般都是在一个大平面上,因为在OpenGL里面y轴是向上的,所以用x-z平面来表示行进物体行驶的平面,方便习惯性我们把它看着x-y平面,那么行进物体行驶的前后、左右、上下中间的曲线分别为:

根据图形表示是两条直线,在同一个方向上能共有五条直线,所以地图的编辑里面应该要被定义好,假设不是直道或是直线,则在物体行进过程中线性方程式的所有信息参数有可能就会变。图2为平台中行驶的换道模型图。

图2 BP网络换道基本模型图
当然除神经网络计算的行驶物体以外,还应该把涉及到所有其他的事件信息物体都要称为障碍物,包括其他行进车辆,那么要判断障碍物在直线的前方、后方、左边,右边、中间、上下,还是在一个方向上,我们应该把事件物体的参数坐标直接代入线性方程就可以判断出来。在行驶物体转动一定方向的角度后就必须重新换算对应这个行驶物体或是其他的线性方程,方向绕轴转动角度θ,那么需要将换算行驶物体的法线向量同样转动θ,方向转动转变为矢量或向量的转动,因此法线向量的换算过程为:

(3)模拟测试
模拟测试是为了网络权值的确定过程,根据表1中预设的变量输入和变量输出,可以得到行驶物体、前面跟进以及可见性换算法有着紧密的联系。

表1 变量输入输出样本值
表1标准化成在0-1.0区间的随机数字,换算生成表2。
我们模拟生成的表格2数据信息,也许不可能全部符合实际行驶的规则,因此要得到一个完全符合实际行驶的数据表,需要进行详细的调研和分析调查得到,因此地图矢量的指定下执行,常态变化后行驶物体应当考虑回轮情况。神经网络算法换道中的事件概率情况和控制物体人、事物、空间、时间等因素都应该并入神经网络模型中,所以这个表格信息数据只能是一个参考策略。实际中的平台里,变量的输入输出也是要增加很多的,因此需要一个完善既符合实际又能真实反映行驶的样本数据表,来完成平台的神经网络模块设计。
总而言之为了基础换道神经网络模型,特地采用多种神经网络算法模块设计成一个双向隐像层网络体系,双向影像层的各个节点分别使用了(2,6),(4,8),(9,9),(10,10),(6,6)的节点,变量输入输出保持多个输入和多个输出节点,遍历算法循环迭代次数在130000到280000之间,均幂次差阈值0.000001,网络界限实现了500万次循环迭代运算,得到界定的网络为:速率在0.35,矢动量在0.18,(6,6)模型,由于差额数据关系,特别是一些信息数据出入比较大,17-21项误差数据信息较大,让模块在三维动画模拟演示时候,行驶物体产生不稳定性因素多,例如抖动,停滞、窜动等等,所以本神经网络算法有待改进的地方还很多。
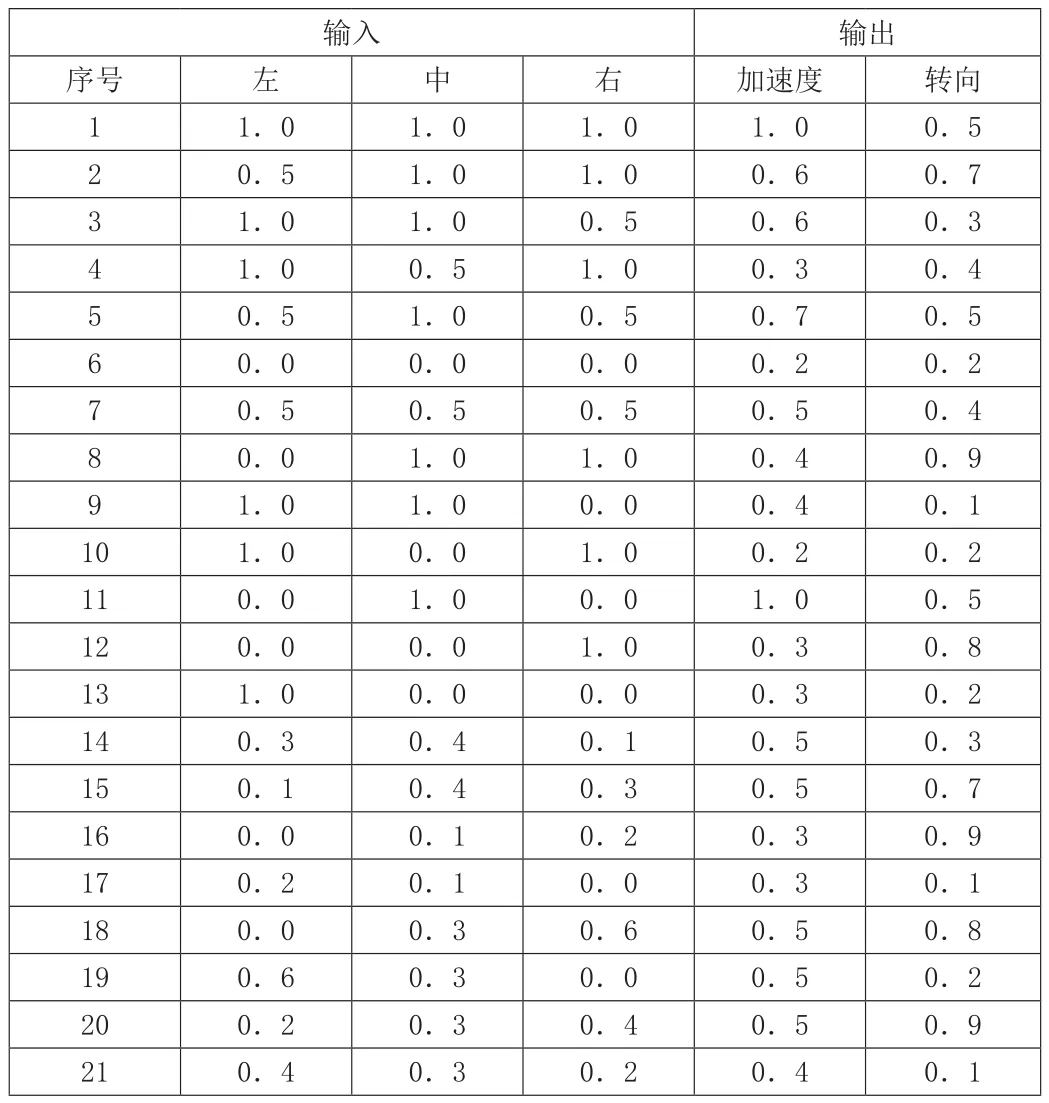
表2 量化后的表格
3.总结
利用OpenGL三维图形库开发标准来实施,采用多种算法模块,简单完成了触发模型算法,基本完成了换道模型的设计之初衷,对现实安全执法、风险评估等有一定指导意义。因个人技术水平和能力有限,只实现了部分功能模块的简答设计和初探。
[1]高宇,隋修宝,陈钱,顾国华.红外图像处理算法硬件实现验证系统[J].红外技术,2012(11).
[2]陈宝国,樊养余,张学峰,王巍.红外焦平面阵列非均匀性校正的改进神经网络算法[J].红外技术,2012(12).
[3]陈宝国,郑志伟,黄士科,沈振康.利用FPGA实现红外焦平面器件的非均匀性校正[J].红外与激光工程,2000(04).
胡小勇,江西省煤炭工业科学研究所,主要研究方向:嵌入式系统研发、网络信息技术等。
猜你喜欢
话语研究论丛(2022年0期)2022-11-02
数学年刊A辑(中文版)(2021年1期)2021-06-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
中学生数理化·高一版(2020年1期)2020-02-20
铁道通信信号(2020年9期)2020-02-06
数学年刊A辑(中文版)(2019年3期)2019-10-08
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
科普童话·百科探秘(2015年4期)2015-05-14
城市道桥与防洪(2014年5期)2014-02-27
智慧与创想(2013年3期)2013-05-09
