
智能避障小车
2017-11-08 05:46西北民族大学电气工程学院代德丹
电子世界 2017年20期
西北民族大学电气工程学院 代德丹 王 猛 李 怡
智能避障小车
西北民族大学电气工程学院 代德丹 王 猛 李 怡
小车的驱动使用L298N驱动电路来完成,由单片机输出的PWM波控制其速度,障碍物采用红外光电开关进行检测,速度及转向由STC89C52单片机控制,从而实现智能避障的功能。
智能小车;STC89C52单片机;L298N;红外光电开关
1 前言
近年来随着科学技术的蓬勃发展,智能机器的种类越来越丰富并且不断地改变着人们的生活方式。智能小车就是智能机器的典型代表。
机器人能利用自动导引小车系统,自动判断和识别路线,及时避开障碍物,选择正确的行进路线。该系统结合传感器,感知路线和障碍并作出判断和相应的执行动作。
智能小车可以分为四大模块:电源、检测单元、驱动单元、中央处理单元。智能小车除了自动避障功能,还可以扩展遥控、循迹、跟随等功能。
小车传感检测部分不需要感知太清晰的图像,因此采用性价比高的红外反射式传感器。智能小车的行进方向和速度则由直流电机来控制
2 设计要求
智能小车采用前轮驱动,通过调制前轮左右两边驱动电机的转速起停从而达到控制小车转向的目的,使用万象轮作为后轮起支撑作用。将两只红外线反射开关分别置于小车两侧,检测障碍物的存在,然后通过单片机内部程序与检测数据作比较,从而实现自动避障功能。
本设计使用红外光电开关利用红外反射原理对小车行进路线中与障碍物的距离进行判断,如不在安全范围内,则通过中央处理器单元主控制CPU的控制判断,给出一个相应的反馈控制指令,控制行驶方向和行驶速度。
本次设计一共包括四个子模块:电源模块、驱动模块、检测模块、主控模块。如图2.1设计模块图。
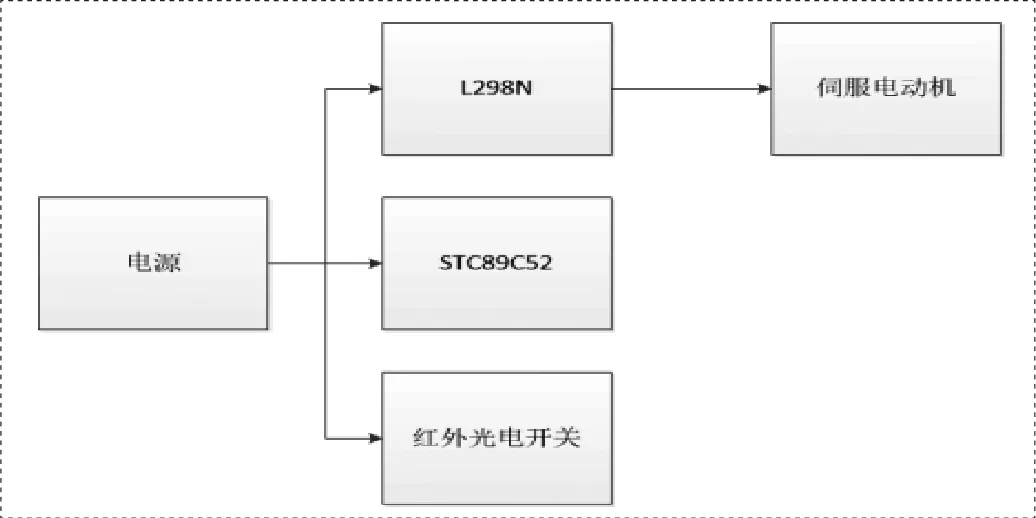
图2.1 设计模块图
3 方案选择
3.1 单片机驱动直流电机方案
使用单片机控制达林顿管组成的,使H型PWM电路在占空比可调的开关状态下进行工作,调整电动机转速。
3.2 电源模块方案
采用4支1.5V电池单电源供电,使用方便,成本低。
3.3 检测模块方案
将两只红外线反射开关分别置于小车两侧,检测障碍物的存在,其安装简易。
3.4 驱动模块方案
采用晶体管作为功率放大器的输出控制直流电机,本次设计采用L298N驱动电机。线性型驱动的加速能力强,原理和电路结构简单,采用由达林顿管组成的H型桥式电路。这种电路由于工作在管子的饱和截止模式下,效率非常高,H型桥式电路保证了方向的控制和简单的实现转速,电子管的开关速度快,稳定性也很强,是一种应用十分广泛的PWM调速技术。调速方法具有调速性能好、调节平稳、调速范围宽、过载能力强、能承受频繁负荷冲击等特点,还可以实现频繁无级快速起动、制动和倒车的优点。
3.5 主控模块方案
STC89C52单片机为整个系统的核心,用来控制小车运动,实现小车既定的性能指标。由我们的系统可得,关键是实现小车的自动控制 ,单片机它的优点是——控制简单、快捷、方便。单片机可以充分发挥其更强大的控制功能和寻址、丰富的资源、操作功能、低廉的价格等优点。
4 硬件设计
4.1 总体设计
设计共包括四个模块:电源模块、检测模块(红外光电开关2个)、驱动模块(L298N模块)、主控模块(STC89C52芯片)。如图4.1总体设计电路图。
4.2 驱动模块
驱动电机通常采用H桥驱动电路,和L298N是H桥驱动电路集成,使驱动电路可用于驱动电机。通过单片机给予L298N电路PWM信号来控制小车的速度、起停。桥式电路如图4.2.1所示。
图4.2.1H桥式电路工作原理:当ENA=1,IN1=1,IN2=0时,T1、T4导通,T2、T3截止,电机运行状态为正转;当ENA=1,IN1=0,IN2=1时,T1、T4截止,T2、T3导通,电机运行状态为反转;当ENA=0时,无论IN1、IN2为何值,电机都不工作,处于停止状态。同理,另一电机运行工作原理如上。

图4.1 总体设计电路图
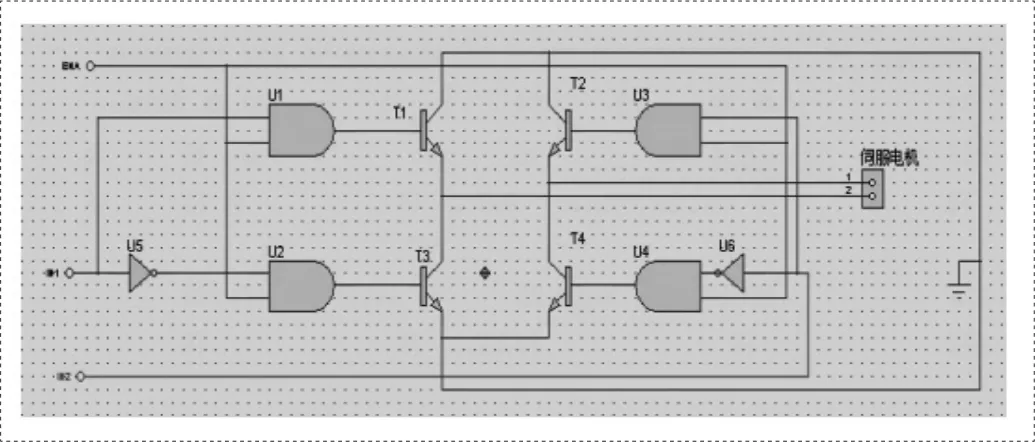
图4.2.1 H桥式电路
4.3 检测模块
当接通电源时,红外光电开关内的红外发射管红外发射前,一旦物体或人体的有效范围内,将有一部分反射回来的红外发射管和安装接收光敏管转换成电信号,由内部电路模块解调、放大整形,处理,输出为高电平信号。红外光电开关的红外线发射能力受工作电压影响,电压低,能力弱,检测距离短;反之距离越远。通过调节RV2的值改变发射功率,通过调节RV1可以改变接收功率。红外反射开关工作电路图如图4.3.1所示。
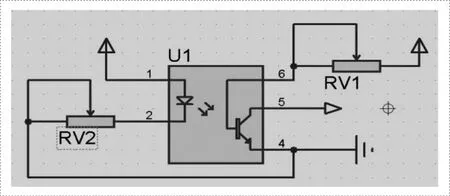
图4.3.1 红外光电开关工作电路图
4.4 主控模块
采用STC89C52,对信号进行采集分析,并给出PWM波控制电机速度,启动和停止,对障碍物进行检测,报警等功能。其主控芯片STC89C52的引脚图如图4.4.1所示。
5 软件设计
如图5.1软件设计流程图,程序采用C语言编写,方便移植。在编程时采用模块化设计,程序结构清晰,提高了开发调试效率。
先对系统进行功能复位,然后红外光电开关启动检测,确定是否有障碍物,若无则直线行驶;若有则对障碍物具体方向做具体判断,改变电机运行状态,操作完成后将进一步判断障碍物,若没有保持原行进方向。
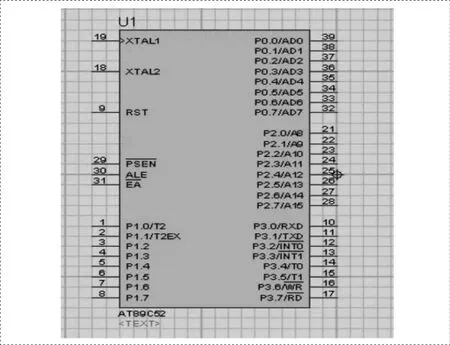
图4.4.1 主控芯片STC89C52引脚图
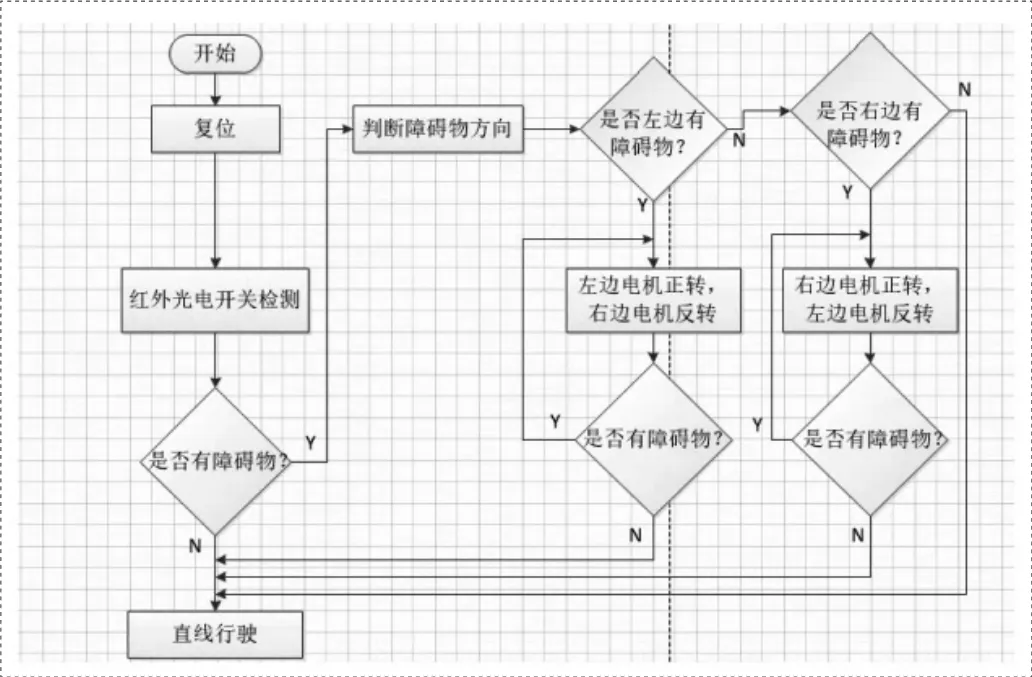
图5.1 软件设计流程图
6 结束语
整个系统的设计以STC89C52单片机为核心,采用多种传感器,软硬件相结合。本系统可以实现以下功能:
如果小车偏离车道或低于安全距离的障碍,小车将发出警报,提醒司机。
如果司机在危险情况未能及时作出相应反应,汽车会自动减速并停在路边。
西北民族大学中央高校基本科研业务费资金资助项目“智能避障小车”(项目编号:Y17106)。
代德丹(1995—),重庆彭水人,大学本科,现就读于西北民族大学。
王猛(1996—),重庆巫溪人,大学本科,现就读于西北民族大学。
李怡(1995—),重庆彭水人,大学本科,现就读于西北民族大学。
猜你喜欢
快乐语文(2020年36期)2021-01-14
商品与质量(2020年33期)2020-11-07
科学大众(2020年17期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
现代商贸工业(2018年31期)2018-12-08
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子测试(2017年11期)2017-12-15
国防制造技术(2016年2期)2016-03-12
