平面缺口型柔性铰链在工业平缝机中的应用研究
2017-11-04 01:27李鹏飞胡章頔
振动与冲击 2017年20期
李鹏飞, 胡章頔, 吴 琼, 杨 扬
(西安理工大学 机械与精密仪器学院,西安 710048)
平面缺口型柔性铰链在工业平缝机中的应用研究
李鹏飞, 胡章頔, 吴 琼, 杨 扬
(西安理工大学 机械与精密仪器学院,西安 710048)
工业平缝机高速运行时,机构铰链间隙产生的振动、噪声、磨损等问题严重影响整机的缝纫性能,论文研究了应用含柔性铰链送布机构改善平缝机性能的可行性。对平面缺口型柔性铰链特点分析基础上,仿真分析了含平面缺口型柔性铰链和传统刚性铰链的GC6720型高速工业平缝机送布机构的送布牙轨迹、支座反力等参数变化规律;设计一种平面缺口型柔性铰链,完成了含该柔性铰链与传统刚性铰链的平缝机性能对比实验;仿真与实验结果表明,采用柔性铰链可使工业平缝机的缝纫性能得到一定程度的提高。
高速工业平缝机;送布机构;刚性铰链;柔性铰链;缝纫性能
工业平缝机是服装加工企业最主要的缝制设备[1],它由各种运动机构组合而成,这些机构中的构件通过刚性铰链连接。实际机构中,由于制造误差、摩擦磨损等原因形成铰链间隙,导致机构的运动精度降低,磨损加剧,稳定性降低,性能下降[2]。随着对工业平缝机工作稳定性和缝纫线迹外观品质的要求增高,由铰链间隙带来的冲击和碰撞对平缝机机构运动的影响不容忽略。
柔性铰链作为改善刚性铰链性能最常见的一种柔性关节形式,是在外力或力矩作用下,利用构件自身的弹性变形完成运动和力的传递及转换的一种运动副结构形式,可以有效地避免振动冲击、摩擦、磨损等[3-4]。它具有体积小、无机械摩擦、无间隙和高灵敏度等优点,在各种要求小角位移、高精度转动的场合具有明显的应用前景。
文献[5-6]对柔性铰链的设计与分析进行了研究。文献[7]对含椭圆柔性铰链的柔性机构进行了动力学建模与分析。文献[8]采用正交链接的多层柔性铰链设计了一种用来整平及对心的对准机构。文献[9]建立了以柔性铰链为基础的柔性机构的位移放大和刚度优化模型。文献[10]对平行板簧柔性机构进行了大偏转刚度分析。文献[11]对大位移柔性铰链进行了设计。文献[12]设计了基于大工作空间机器人的片簧式转动柔性铰链。文献[13]搭建了含柔性铰链的柔顺并联机器人实验平台。但是柔性铰链的实际应用不多。
本文在分析常见的平面缺口型柔性铰链特点基础上,以GC6720型高速工业平缝机的送布机构为对象,研究了传统刚性铰链与平面缺口型柔性铰链对机构动力学性能参数的影响。通过仿真和实验验证柔性铰链在缝制机械中应用的可行性。
1 平面缺口型柔性铰链形式与特点
目前,柔性铰链的形式主要有以下几种:平面缺口型、裂筒式、交叉杆式、凹槽式、平板折展式、内部截面减小式、剪式、双板簧式、四板簧式。
平面缺口型柔性铰链是目前应用最广的柔性铰链形式,其转动依靠构件本身材料的弹性变形实现。这种铰链结构简单,非常适于微型化,但其运动范围一般不超过45°左右。其刚度与尺寸,特别是与缺口的形状、尺寸有很大关系[14]。
常见的缺口形式有直梁形和直圆形。直梁形缺口有较大的转动范围,但运动精度较差;而直圆形缺口的运动精度较高,但转动范围相对较小[15]。为了兼顾运动精度和运动范围,又衍生出抛物线形、椭圆形、双曲线形等缺口形式的柔性铰链。
2 含刚性铰链送布机构动力学分析
送布机构在工业平缝机中的作用是将缝料以一定的规律传递,是典型的五杆机构,其机构简图如图1所示,图中F为送布牙。

图1 送布机构简图Fig.1 The schematic diagram of a feeding mechanism

图2 送布牙轨迹Fig.3 The trajectory of feeding tooth

图3 送布牙速度曲线Fig.3 The speed curve of feeding tooth

图4 送布牙加速度曲线Fig.4 The acceleration curve of feeding tooth
由图2和图3可以看出,两种铰链间隙情况下,送布牙的运动轨迹和速度与理想轨迹和速度基本重合。
从图4可以看出,送布牙加速度在间隙状态下出现剧烈波动,且当间隙值减小时,波动会相应地减小。
送布机构中,由于构件加速度的剧烈变化,引起铰链碰撞力、支座反力的波动是导致整机产生强迫振动和噪声的主要原因。采用ADAMS中特征圆模型模拟间隙铰链D,其仿真模型如图5。两种间隙下,铰链D处碰撞力、以及A、E两支座反力随时间的变化分别如图6、图7、图8所示。

图5 铰链D仿真模型Fig.5 Simulation model of hinge D

图6 铰链D碰撞力变化曲线Fig.6 The impact force curve of hinge D

图7 A支座反力变化曲线Fig.7 The curve of reaction force at A supporting point

图8 E支座反力变化曲线Fig.8 The curve of reaction force at E supporting point
从图6~图8可以看出,由于铰链间隙的存在,铰链D处所产生的碰撞力和A、E两处支座反力变化均较为剧烈,且随着间隙值的减小,碰撞力和支座反力波动相应减小。这将使支座产生的振动和噪声也减小。可见减小铰链间隙可以改善支座反力的波动,降低机构的振动和噪声。
3 含柔性铰链送布机构动力学分析
3.1 柔性铰链设计
65Mn弹簧钢具有良好的疲劳性能、淬透性、物理化学性能等,在规定的弹性变形范围内具备一定刚度,能承受冲击和振动作用下产生的载荷,载荷去除后能很好地恢复变形。本文选取65Mn弹簧钢制作柔性铰链。
图1所示送布机构运动过程中,铰链A、B、C、D、E角度变化规律如图9所示。可以看出铰链D的角度变化幅度最小(70.51°~84.11°),约为13.6°。这里采用图10所示的平面缺口型柔性铰链取代原送布机构中D处的传统刚性铰链。
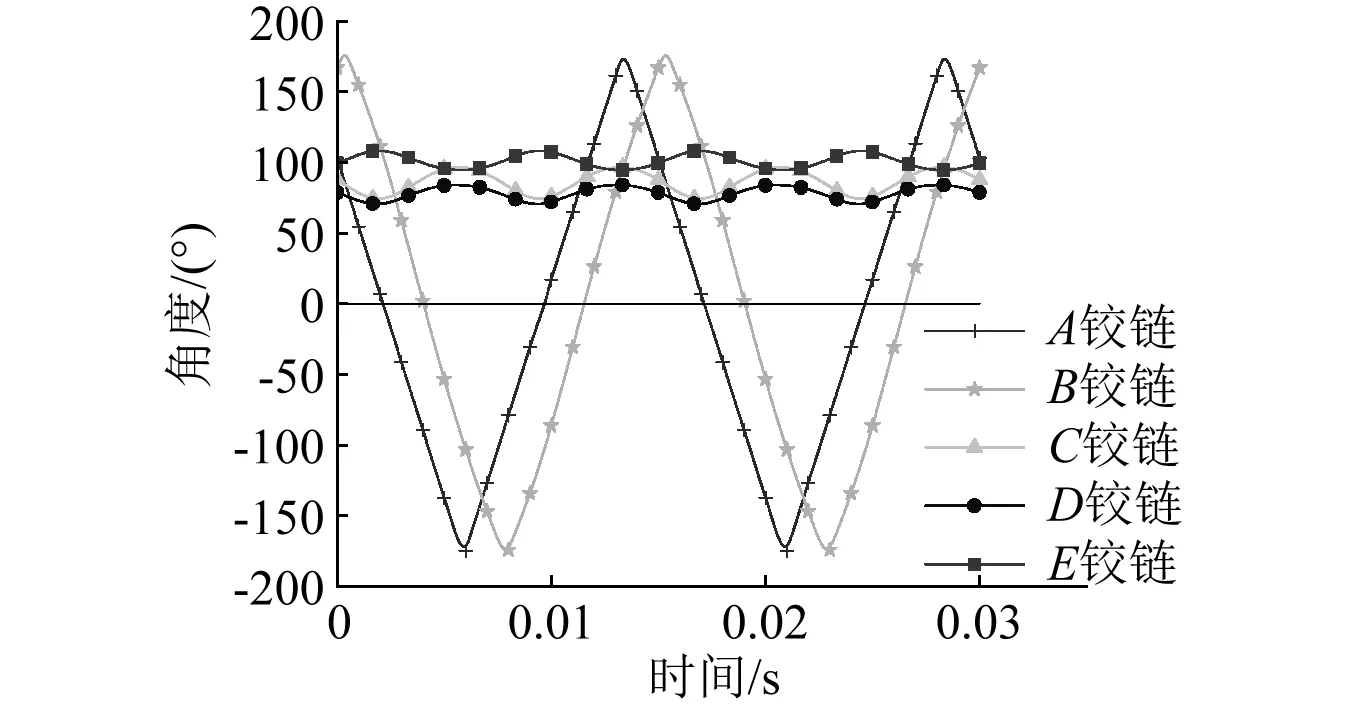
图9 不同铰链角度变化曲线Fig.9 Angle curves of different hinges
将图1中AB杆、DE杆与x轴的夹角分别为65.24°和102.25°时,设定为送布机构的初始位置,此时铰链D处夹角值θ=77.3°。根据送布机构的初始位姿,确定柔性铰链的结构参数为:θ=77.3°,R=7 mm,b=5 mm,δ=0.5 mm,r=1 mm,L=36.4 mm。
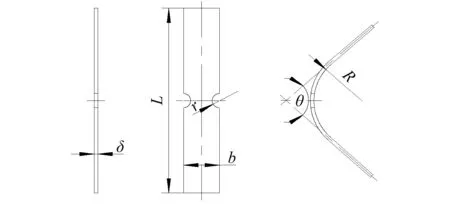
图10 平面缺口型柔性铰链Fig.10 The diagram of a plane notch flexure hinge
3.2 送布机构动力学分析
为了分析柔性铰链的变形,基于伪刚体法,将D处如图11(a)所示的柔性铰链等效为如图11(b)所示的“刚性杆+铰链+扭转弹簧”的模型。在力矩Mz作用下柔性铰链的角变形θr表达式写为
(1)

(2)
式中:E为材料的弹性模量;δ为弹性体厚度。则伪刚体模型中扭转弹簧的刚度系数为

(3)
应用ADAMS软件,建立如图11所示的柔性铰链装配模型,仿真得到含柔性铰链送布机构的送布牙轨迹、速度和加速度曲线分别如图12、图13、图14所示。

图11 柔性铰链装配模型Fig.11 The assembly model of flexible hinge
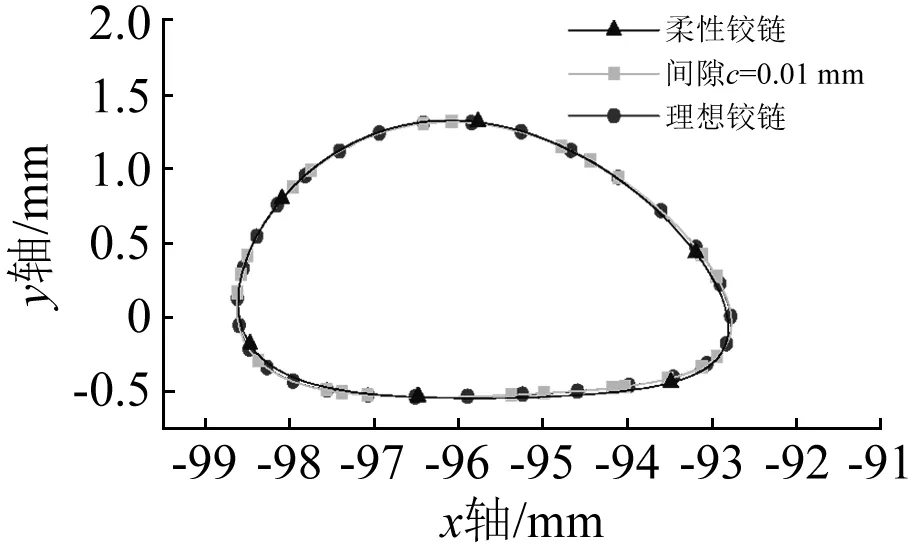
图12 送布牙轨迹Fig.12 The trajectory of feeding tooth
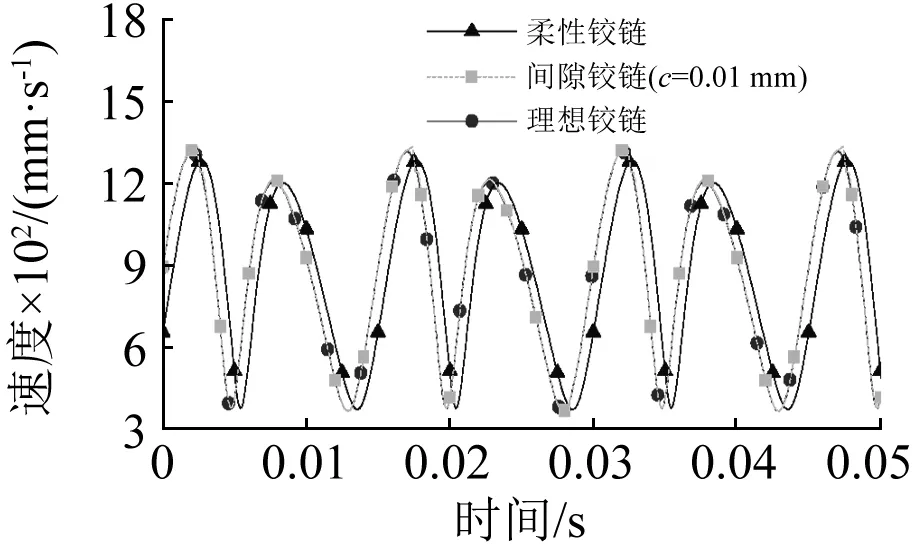
图13 送布牙速度曲线Fig.13 The speed curve of feeding tooth
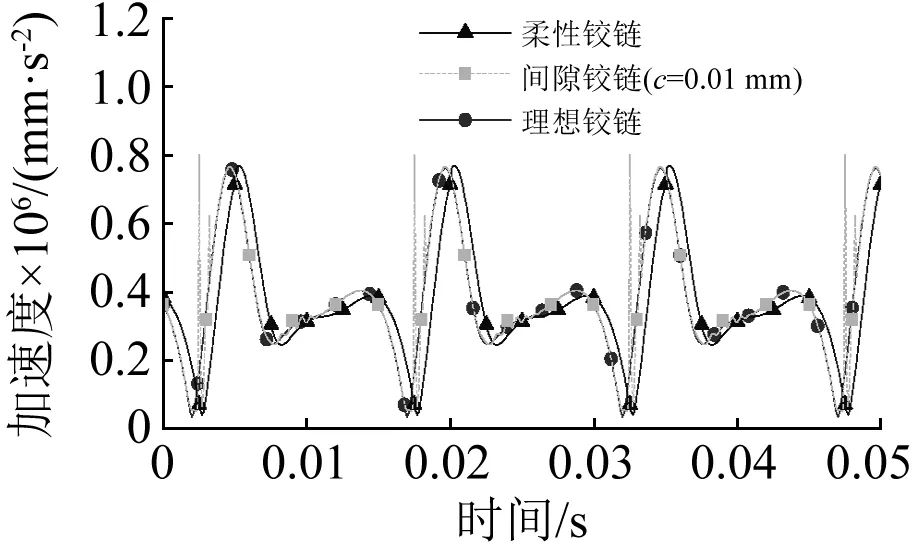
图14 送布牙加速度曲线Fig.14 The acceleration curve of feeding tooth
从图12、13、14可以看出,含柔性铰链、间隙铰链和理想状态的送布牙运动轨迹吻合较好,运动平稳且没有波动。含柔性铰链送布牙的速度、加速度与刚性铰链相比没有发生波动,且其变化趋势与理想铰链相似,仅有约0.000 8 s的滞后。
A、E两处支座反力分别如图15、图16所示。与图7、图8对比可以看到,柔性铰链的使用显著地减小了支座反力的幅值,这将极大地改善支座的振动与噪声问题。
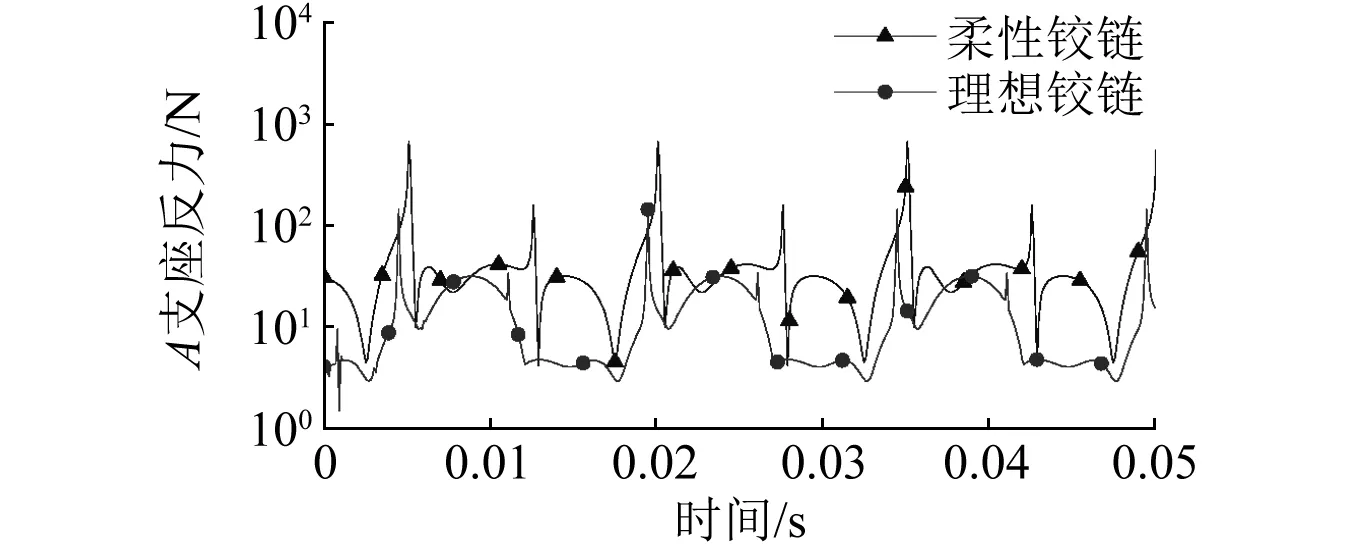
图15 A支座反力变化曲线Fig.15 The reaction force curve at A supporting point

图16 E支座反力变化曲线Fig.16 The reaction force curve at E supporting point
4 实 验
4.1 实验装置
实验使用GC6720型高速平缝机、MotionPro X4型高速摄像机、DELL笔记本工作站、理音VM-83测振仪(精度±5%)和理音NL-42噪声计(精度±5%),装置如图17所示。其中,图(a)为振动噪声测量实验装置,图(b)为运动轨迹测量实验装置,由于送布机构安装在台板下方,工作状态时无法录制送布牙运动轨迹,需将整机放置于台板之上。
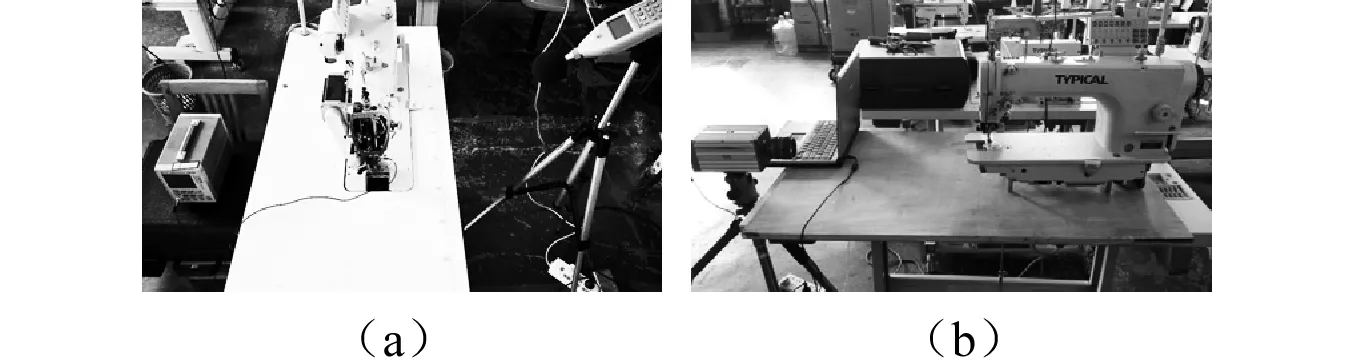
图17 实验装置Fig.17 Test bench
如图18(a)为平面缺口型柔性铰链实物,将其用Loctite乐泰7649促进剂和680固持胶固定在相邻两杆件的夹槽内,装配实物如图18(b)所示。

图18 柔性铰链实物Fig.18 The physical picture of flexure hinge
4.2 运动轨迹与振动噪声
工业平缝机的电机转速为3 000 r/min,分别采集安装原刚性铰链和柔性铰链时送布机构的运动轨迹,实验结果如图19。

图19 轨迹对比图Fig.19 The comparison diagram of trajectory
可以看出,含柔性铰链送布机构与原刚性铰链送布机构相比,两者送布牙上跟踪点的运动轨迹十分接近。这表明,用柔性铰链
取代原刚性铰链能够使送布机构很好地完成送布任务。多次测量得含原刚性铰链送布机构的整机振动位移均值为0.065 mm、噪声均值为72.1 dB,含柔性铰链送布机构的整机振动位移均值为0.061 mm、噪声均值为71.4 dB。比较可知,选取缺口型柔性铰链取代原送布机构中的传统刚性铰链,可以有效减小整机的振动与噪声。
4.3 缝纫线迹
如图20为含柔性铰链的送布机构在不同转速时布料的缝纫结果,图(a)、(b)分别为布料的正反两面。

(a) 正面

(b) 反面图20 缝纫结果Fig.20 Sewing results
可以看出,含柔性铰链的送布机构样机在不同转速下缝纫时不存在断针、断线、跳针、浮线等现象,符合QB/T 2627—2004对工业平缝机连续缝纫的要求。以不同转速各缝制2条线迹,取其中每10个连续针距为一测量段,每种转速任取10个测量段,一个测量段的理论长度为30 mm,用游标卡尺量取每段线迹的长度并进行比较,数据见表1。
表1不同转速时线迹长度比较
Tab.1Thecomparisonofstitchatdifferentspeedsmmmm

比较含传统刚性铰链和柔性铰链送布机构在不同转速下线迹的标准差,均符合行业标准(小于±10%)的要求,可以看出含柔性铰链送布机构所缝制的线迹标准差更小,即线迹的均匀性较好。
综上所述,从运动轨迹、振动、噪声和缝纫线迹来看,在GC6720型高速工业平缝机的送布机构中采用缺口型柔性铰链取代传统刚性铰链可有效提高整机的缝纫性能。
5 结 论
本文分析了常用的平面缺口型柔性铰链特点;对含传统刚性铰链和含柔性铰链的送布机构进行了动力学分析;设计了一种含缺口型柔性铰链的新型送布机构,通过实验验证了采用柔性铰链取代原刚性铰链可以有效地降低工业平缝机整机振动和噪声,提高了缝纫性能,为高速工业平缝机减振降噪设计提供了一条途径。
[1] 胡睿. 缝纫机的现状与发展趋势[J]. 商业文化, 2011(9): 316-318.
HU Rui. The current situation and trend of development of sewing machine[J]. Business Culture, 2011(9): 316-318.
[2] 张策. 机械动力学[M]. 北京: 高等教育出版社, 2004: 73-82.
[3] HOWELL L L. Handbook of compliant mechanisms[M]. New York: John Wiley & Sons, 2001.
[4] GOLDFARB M, SPEICH J E.A well-behaved revolute flexure joint for compliant mechanism design[J].Transactions of the ASME, 1999, 121(9): 424-429.
[5] 吴鹰飞,周兆英.柔性铰链的计算和分析[J].工程力学, 2002, 19(6): 136-140.
WU Yingfei, ZHOU Zhaoying. Design of flexure hinges[J].Engineering Mechanics, 2002, 19(6): 136-140.
[6] 吴鹰飞,周兆英.柔性铰链的计算和分析[J].机械设计及研究, 2002, 18(3): 29-30.
WU Yingfei, ZHOU Zhaoying. Design calculation and analysis of flexure hinge[J]. Machine Design and Research, 2002,18(3): 29-30.
[7] 王雯静, 余跃庆. 椭圆柔性铰链柔顺机构的动力学建模与分析[J]. 机械设计与研究, 2007, 23(6): 54-57.
WANG Wenjing, YU Yueqing. Dynamic modeling and analysis of compliant mechanism with elliptical flexure hinges[J]. Machine Design and Research, 2007, 23(6): 54-57.
[8] ZHAO J, WANG H X, GAO R J, et al. A novel alignment mechanism employing orthogonal connected multi-layered flexible hinges for both leveling and centering[J]. Review of Scientific Instruments, 2012, 83(6): 0651021-0651027.
[9] LOBONTIU N, GARCIA E. Analytical model of displacement amplification and stiffness optimization for a class of flexure-based compliant mechanisms[J]. Computers & Structures, 2003, 81(32): 2797-2810.
[10] BROUWER D M, MEIJAARD J P, JONKER J B. Large deflection stiffness analysis of parallel prismatic leaf-spring flexures[J]. Journal of the International Societies for Precision Engineering and Nanotechnology, 2013, 37(3): 505-521.
[11] TREASE B P, MOON Y M, KOTA S. Design of large displacement compliant joints[J]. Journal of the International Societies for Precision Engineering and Nanotechnology, 2013, 37(3): 505-521.
[12] YONEMOTO K, TAKEDA Y, TONG Z, et al. A new flexure revolute joint with leaf spring and its application to large workspace parallel robot[J]. Journal of Advanced Mechanical Design Systems and Manufacturing, 2012, 6(1): 76-87.
[13] 余跃庆, 吕强, 马兰. 含有柔顺关节的并联机器人轨迹跟踪实验[J]. 北京工业大学学报, 2015, 41(4): 486-492.
YU Yueqing, LÜ Qiang, MA Lan. Experimental study on trajectory tracking of parallel robots with compliant joints[J]. Journal of Beijing University of Technology, 2015, 41(4): 486-492.
[14] EASTMAN F S. The design of flexure pivots[J].Journal of Aerosol Science, 1937, 5(1): 16-21.
[15] 左行勇, 刘晓明. 三种形状柔性铰链转动刚度的计算与分析[J]. 仪器仪表学报, 2006, 27(12): 1725-1728.
ZUO Xingyong, LIU Xiaoming. Calculation and analysis of rotational stiffness for three types of flexure hinges[J]. Chinese Journal of Scientific Instrument, 2006, 27(12): 1725-1728.
Astudyontheapplicationsofaplane-notchflexurehingeonindustrialsewingmachines
LI Pengfei, HU Zhangdi, WU Qiong, YANG Yang
(School of Mechanical and Precision Instrumental Engineering, Xi’an University of Technology, Xi’an 710048, China)
The sewing performances of an industrial sewing machine under high speed working condition were impacted severely by vibration, noise and wear because of joint clearance. A plane-notch flexure hinge replacing a traditional rigid joint was studied to improve sewing performances of a machine. Forms and characteristics of those existing flexure hinges were analyzed. Those parameters, such as the trajectory of feeding teeth and reaction forces at different supporting points of GC6720 type high speed industrial sewing machine, were simulated considering a plane-notch flexure hinge and a traditional rigid joint respectively. A plane-notch flexure hinge was designed and fixed with the feeding mechanism. The testing experiments of the sewing machine including a plane-notch flexure hinge and a rigid joint respectively were performed. A conclusion could be drawn that a flexure hinge can improve sewing performances of an industrial sewing machine.
high speed industrial sewing machine; feeding mechanism; rigid joint; flexure hinge; sewing performance
国家自然基金(51475364);陕西省科技厅重点项目(2013KTZB01-01-0204)
2016-05-24 修改稿收到日期: 2016-07-21
李鹏飞 男,博士,教授,1968年生
E-mail:lipengfeinew@163.com
O383
A
10.13465/j.cnki.jvs.2017.20.021
猜你喜欢
当代陕西(2022年5期)2022-04-19
今日农业(2021年6期)2021-06-09
支部建设(2020年30期)2020-12-18
河南科学(2020年3期)2020-06-02
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
制造技术与机床(2017年3期)2017-06-23
中国卫生(2015年9期)2015-11-10
CHIP新电脑(2014年5期)2014-05-14