模块化航天器电源系统仿真研究
2017-11-03 02:58,,
计算机测量与控制 2017年10期
,,
(1.装备学院 研究生院,北京 101416 ;2.装备学院 航天装备系,北京 101416)
模块化航天器电源系统仿真研究
贺广松1,李新洪2,王谦1
(1.装备学院研究生院,北京101416 ;2.装备学院航天装备系,北京101416)
模块化航天器快速响应对迅速提高我国空间信息支援能力具有重大意义,所以为了快速增强我国空间实力,以快速响应为背景,对模块化航天器进行研究,首先介绍了模块化航天器及其快速集成测试方法,之后,以模块化航天器电源系统为例,通过数学模型搭建了其Simulink模型,主要对帆板面积,蓄电池容量,以及卫星在轨功率进行分析,最后,通过仿真结果验证了所建模型的准确性,为模块化航天器快速响应奠定了基础,同时提出了模块化航天器电源系统的快速响应应用模式。
快速响应;模块化航天器;电源系统;仿真
0 引言
信息条件下的现代化战争,空间信息极其重要,空间技术以成为时代热点和一个国家综合实力的代表[1-2],卫星的信息支援能力必当是夺取空间信息优势的重要保障。但是受传统航天器“整体式设计,一次性使用”设计思想的影响,传统航天器无法满足突发战争时空间能力需求[3]。快速响应航天器的应用恰好解决了传统航天器应对突发事件能力不足的问题。
快速响应航天器有两种发展思路。一种思路是一体化,集成化设计。由于卫星和运载火箭已经连接在一起,这种思路可以减少卫星和火箭的测试时间,能够实现快速集成,快速发射。但是由于其技术特点,卫星载荷都是之前安装好的,所以能够完成的任务较为固定;另一种思路是模块化设计。模块化航天器按照其功能被分解为多个不同的模块。这些模块功能独立、物理独立,通过标准接口集成在一起,实现整个航天器系统的功能[4]。模块化航天器模块间可以进行灵活组装,满足不同的任务要求,同时模块间采用标准化接口和即插即用技术,方便其快速集成,测试。所以本文对模块化航天器进行研究。
随着模块化航天器技术日益成熟[5],本文以此为背景,对模块化航天器快速集成测试及其建模仿真进行研究,旨在提高我国空间系统快速响应能力,这对于提高我国空间系统信息支援能力具有重大意义。
1 模块化航天器及快速集成测试
1.1 模块化航天器概况
模块化航天器已经有数十年的发展历史,下面介绍几种具有代表性的模块化航天器。
1) SMARTBus:SMARTBus是基于多个功能模块协同工作的智能模块化平台[6],它采用可以堆叠的模块化结构,划分为有效载荷基板、通信模块、姿态确定模块、姿态控制模块、蓄电池模块以及太阳能帆板模块等子系统模块,如图1所示。
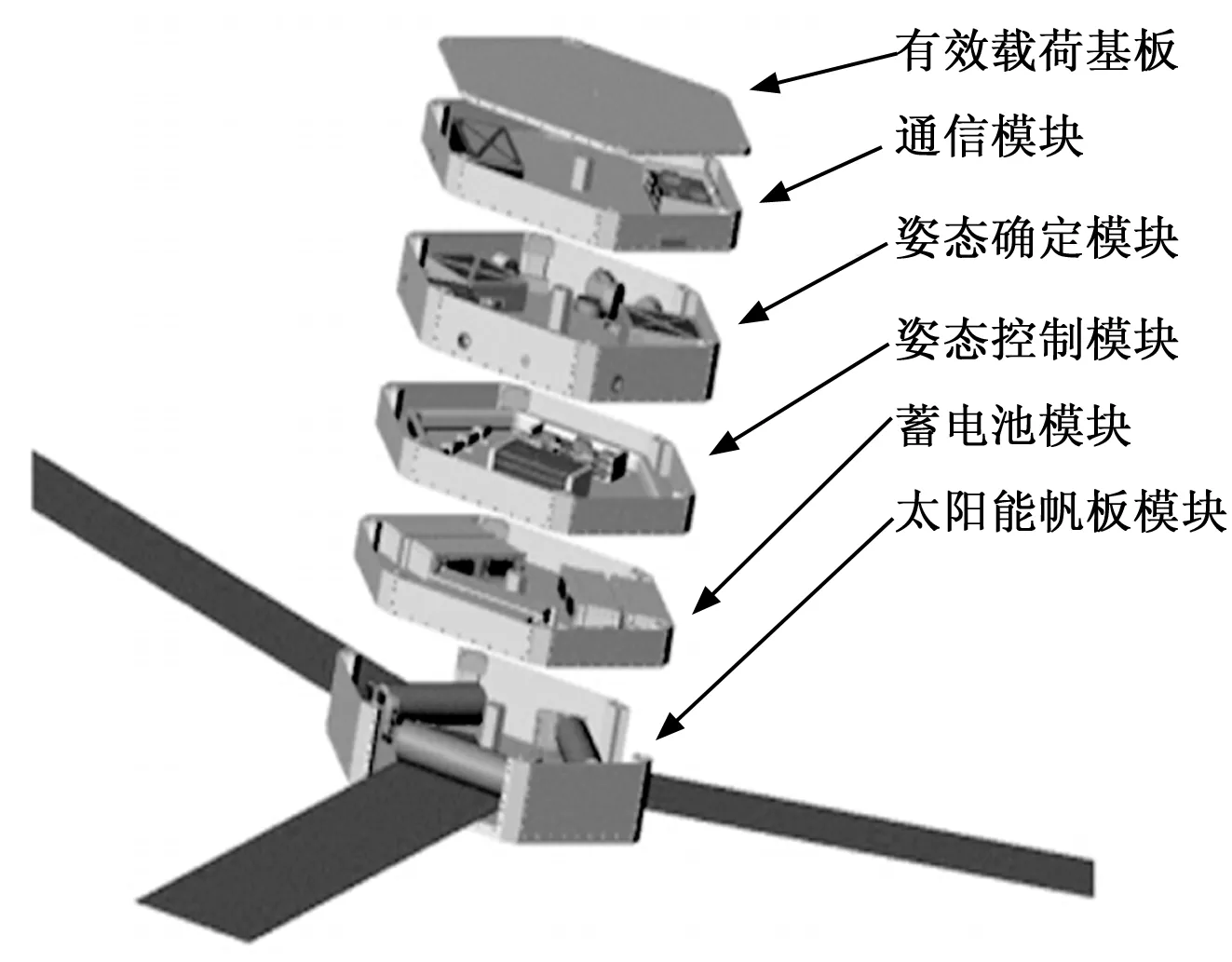
图1 SMARTBus整体结构
2) PETSAT:PETSAT(Panel Extension Satellite)是日本进行的模块化航天器研究项目。PETSAT航天器由多个功能板组成,共同实现航天器功能。PETSAT以折叠状态发射,入轨后展开,如图2所示[6]。
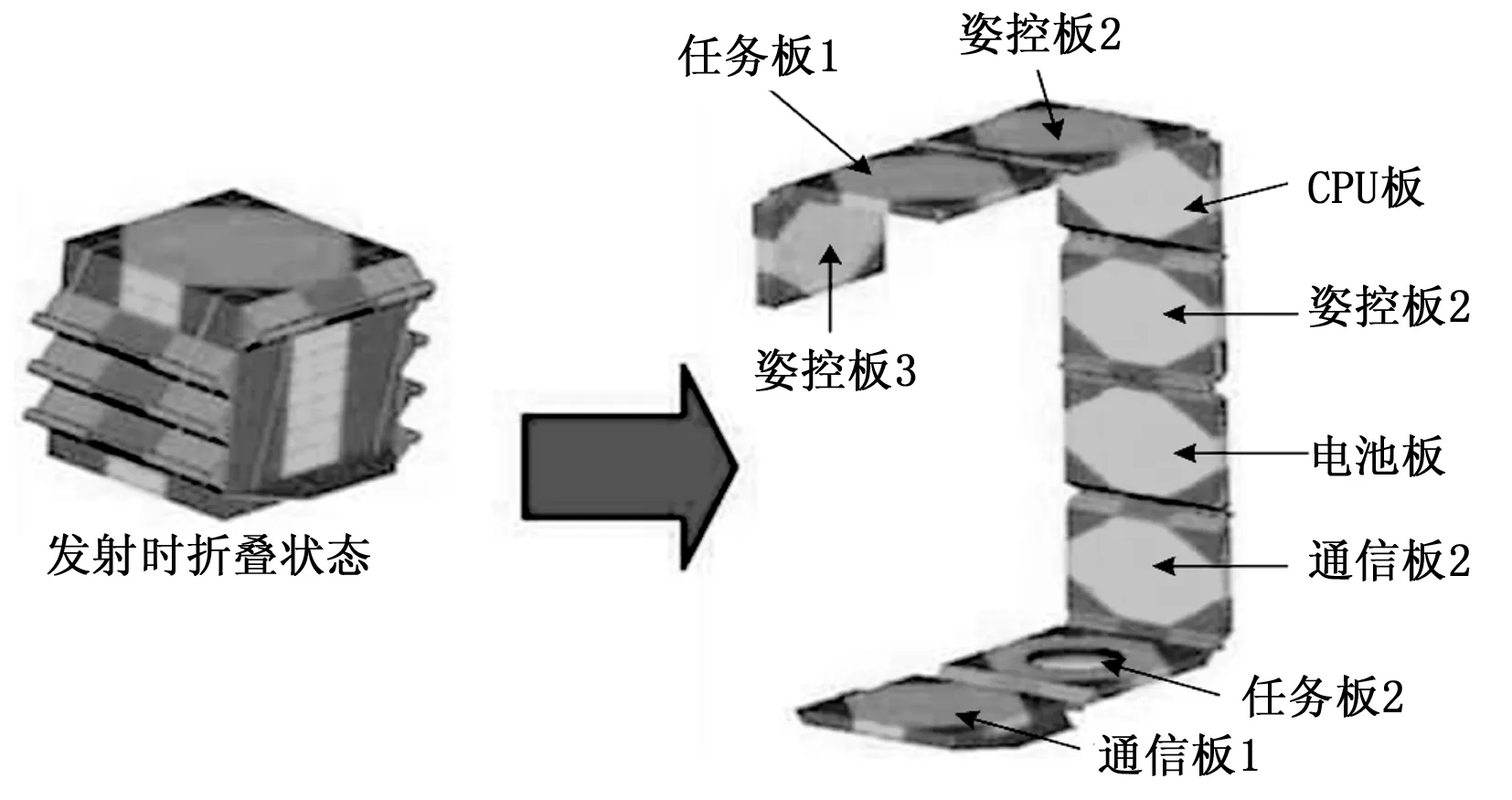
图2 PETSAT折叠及在轨展开示意图
3) F6卫星系统:F6计划是对分离模块概念进行的技术研发和演示验证项目[7]。F6项目构想是把一个航天器的功能单元优化分解为多个模块,每个分离模块仍是一颗卫星,如图3所示。
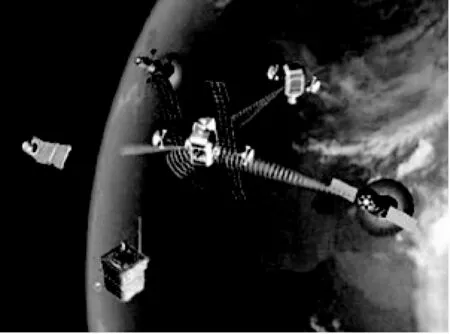
图3 F6计划原理图
1.2 模块化航天器快速集成测试
快速集成测试是指将组成航天器平台的各分系统与有效载荷集成为航天器并对各模块进行选择和测试的技术。这项技术是模块化航天器能够实际应用的保证,主要分三步:
1)根据任务需求进行分析,通过得到的分系统模块参数,从仓储的分系统模块中进行选择;2)通过模块之间的标准化接口组装集成模块化卫星;3)测试组装集成的模块化卫星的性能参数,检验其是否满足卫星设计要求和任务需求,满足则进行快速发射,卫星入轨后,就可以实现空间信息支援。
本文以电源分系统为例,对其快速集成测试进行研究,通过建模仿真,主要分析卫星电源系统部件的选择和测试过程。
2 模块化航天器建模仿真
卫星电源系统是星上产生、存储、转换、协调和分配电能的系统,简称电源系统。电源系统的基本功能是应用能量转换方法将光能等其他形式的能量转换成电能,就如同我们生活中的发电站。卫星电源系统对于卫星来说,就如同是人类的心脏,它要为卫星的正常工作提供动力,作为卫星的主要组成部分,该系统是否能够正常运行直接决定着有效载荷能否可以顺利完成任务。
2.1 卫星电源模块分析
目前电源系统应用频率最高的是太阳电池阵-蓄电池组电源系统,该电源系统主要包括三部分:太阳能帆板,蓄电池和电源控制器,这三部分为卫星不间断地提供电能并保障系统稳定可靠。太阳电池阵-蓄电池组电源系统的工作模式为:光照期时,由太阳能帆板为负载供电,同时为蓄电池充电,将太阳能转化为电能;地影期时,由蓄电池为负载供电。能量传输方式多采用直接能量传递,将电能直接输入负载,传输效率高并且可靠。
1) 太阳能帆板:太阳能帆板将太阳能转换为电能,是由太阳电池组件或太阳电池板按照特定的机电方式组装在一起构成的直流发电装置,一般包括太阳电池电路,基板,连接架和压紧及展开机构等。太阳能帆板按照其在航天器上的安装方式主要分为体装式太阳能帆板和展开式太阳能帆板。体装式太阳能帆板安装在航天器外部壳上,其形状可以是圆柱体、圆锥体、多面体;展开式太阳能帆板安装在航天器外伸上,按对日定向方式可以分为定向式和不定向式两种,对日定向式又可分为太阳能帆板和航天器刚性连接的固连式和太阳能帆板能够独自靠轴调姿的非固连式。
2) 蓄电池:储能装置是航天器电源系统的重要组成部分。当航天器运行在轨道的地影期时,太阳能帆板因为没有光照不能给航天器提供电能,必须由储能装置为航天器供电,航天器的储能装置有很多种,目前可重复进行充放电的蓄电池组是首选的储能装置。蓄电池是将光照期太阳能帆板提供的能量进行存储的装置,分为一次使用和二次使用。一次电池可以把化学能转换为电能,但是不能反向进行,二次电池可以在充电时将电能转化为化学能,又可以在放电时将化学能变为电能。当前锂离子蓄电池以其比能量高的优势被广泛使用,得到航天工作者的青睐。
3) 电源控制器:电源控制器是卫星电源系统中的重要组成部分。电源控制器主要有两类,一类由分流调节器、充电调节器、放电调节器组成,另一类由串联开关调节器和峰值功率跟随器组成。其起到的作用是处理太阳电池阵的输出功率、对母线电压进行调整、控制蓄电池组的充放电、查找故障与分离、重构系统和管理测控,切实保障电源系统安全可靠运行。
2.2 仿真平台
本文应用Simulink仿真模型,Simulink是Matlab中的重要组成部分,它为用户提供了一种动态,综合的建模方法,并且便于分析仿真结果。卫星子系统仿真对计算机的计算能力、实时性有很高的要求,所以本文采用实时仿真机,该机器运算能力强,实时性好,还具有良好的扩展能力,是卫星子系统实时仿真的最佳选择。
2.3 卫星电源模块数学模型及Simulink模型
本文卫星运行轨道为圆轨道,太阳能帆板安装方式为展开式,帆板和卫星刚性固连,采用锂离子蓄电池。为了使电源系统模型更加准确,本文建立了太阳能帆板面积,蓄电池容量,卫星地影期判断以及太阳光与太阳能帆板法线夹角的数学模型和Simulink模型。
2.3.1 太阳能帆板模型
为了确定卫星所需太阳电池阵面积Asa,首先要确定在整个飞行期间的日照区间内太阳电池阵必须给卫星提供的功率Psa以及单位面积太阳电池阵寿命末期功率PEOL。
Psa=(PeTe/Xe+PdTd/Xd)/Td
在日照期,帆板产生的功率一方面为蓄电池充电,一方面直接为负载提供电源,且负载所获功率为Pd,传输效率为Xd,取0.85。在地影期,蓄电池负责为负载提供电源,负载所获功率为Pe,这样由帆板产生的功率经过蓄电池馈送到负载方式的传输效率为Xe,取0.65。Te和Td分别为每一圈轨道中地影区和光照区的时间。
PEOL=PBOL*Ld
(1)
Ld为太阳电池寿命退化因子,PBOL为寿命初期单位面积太阳电池阵功率,其计算公式如下:
PBOL=PSηIdcosθ
(2)
其中:Ps为入射太阳辐射,取值1 358 W / m2,η为太阳电池光电转换率,模型中用ibx表示,Id为太阳电池阵固有退化因素,θ为太阳电池阵法线与太阳光的夹角,模型中用SitaMax表示。
这样可得太阳电池阵面积[9]:

(3)
蓄电池组容量C[9]:
(4)
Cd为蓄电池最大放点深度,Vd为蓄电池平均放电电压,n为蓄电池至负载的传输效率。其Simulink模型如图4所示。

图4 太阳能帆板及蓄电池Simulink模型
2.3.2 卫星地影期判断模型
由于本文采用的是太阳电池阵-蓄电池组电源系统,根据其工作方式可知判断卫星是否受晒是必要条件。参考文献[10-11]可得出其具体数学模型。将模型简化,把地影近似看作为半径为aE的本影,阳光近似看作平行光,如图5所示。
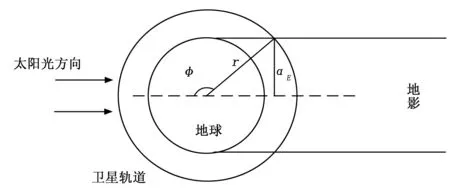
图5 地影期示意图
航天器在地影内所满足的条件为:
(5)
其Simulink模型如图6所示。
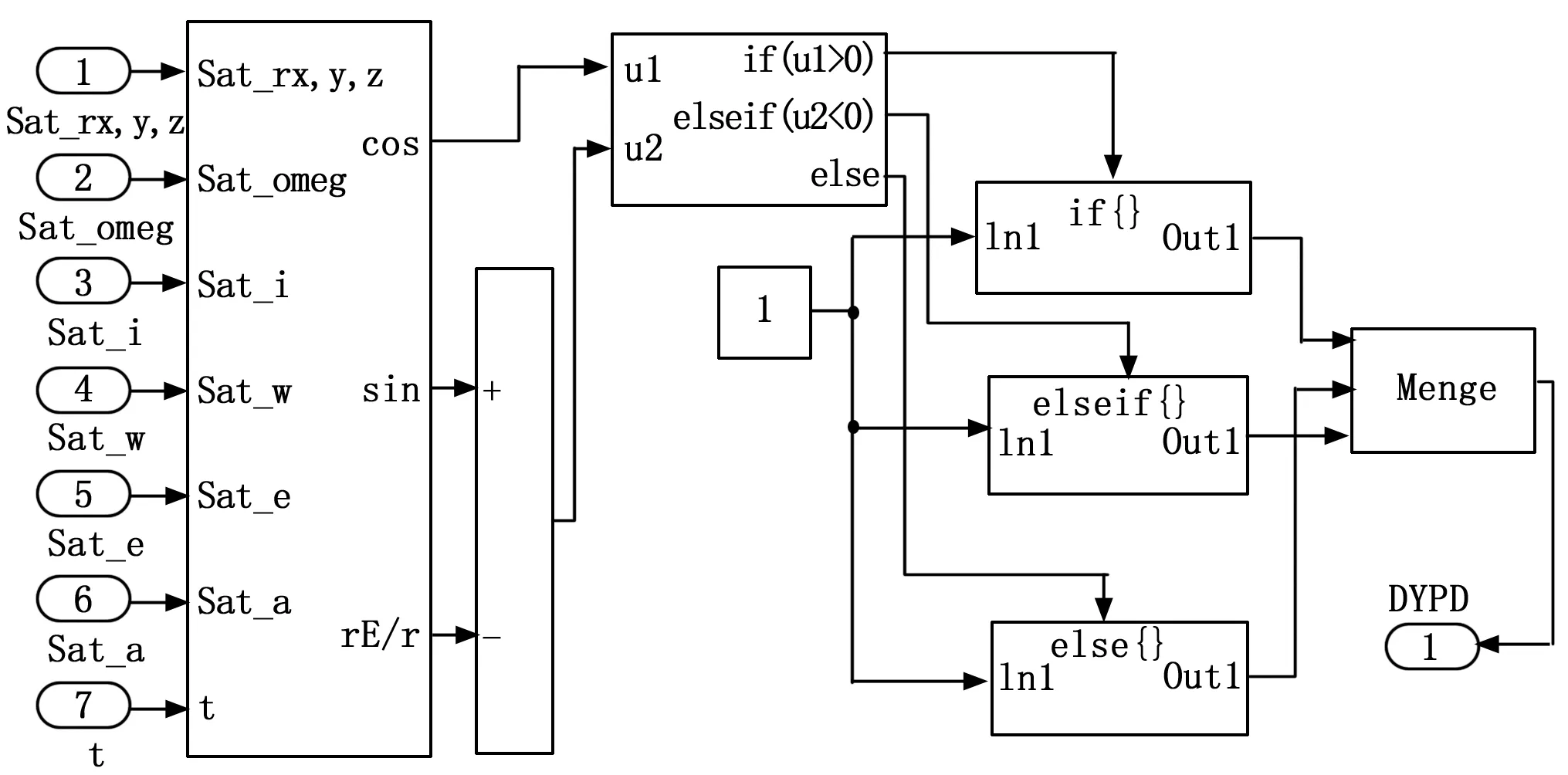
图6 地影期判断Simulink模型
2.3.3 太阳光与太阳能帆板法线夹角模型
(6)
太阳单位矢量在卫星本体坐标系中的投影为:
(7)
Rbi为J2000系到卫星本体坐标系的转换矩阵:
(8)
设太阳与卫星本体各对称轴xb,yb,zb轴的夹角为ξ,η,ζ,则:
cosξ=xsb·xb+ysb·yb+zsb·zb=
xsb·1+ysb·0+zsb·0=xsb
(9)
所以:
cosξ=A11·xSi+A12·ySi+A13·zSi
(10)
同理:
(11)
太阳能帆板与航天器之间是刚性连接,可设卫星上太阳能帆板的法线OA轴在本体坐标系Obxbybzb中的位置是指OA轴在平面Obxbzb内与Obxb轴夹角α,如图7所示,太阳与OA轴的夹角可作如下计算:
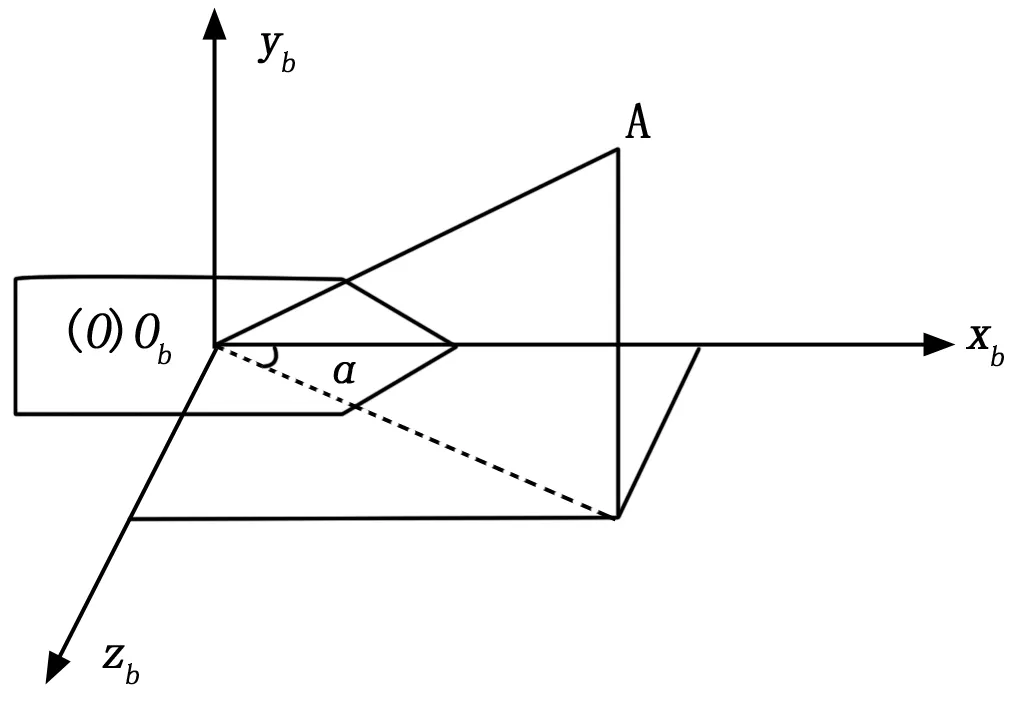
图7 帆板法线示意图
因为OA轴在Obxbybzb中的方向余弦为:
(12)
所以太阳光与OA轴的夹角为:
αA=arcos(cosαxSb+sinαzSb)=
arcos(cosα(A11·xSi+A12·ySi+A13·zSi)+
sinα(A31·xSi+A32·ySi+A33·zSi))
(13)
其Simulink模型如图8所示。
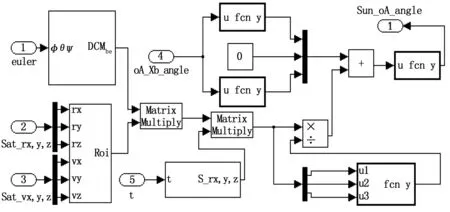
图8 帆板法线与太阳光夹角Simulink模型
2.3.4 电源功率模型
太阳电池供电阵和充电阵的功率分别为:
(14)
(15)
蓄电池输出功率[12]为:
Pbattery=CVdCd/Te
(16)
其中:蓄电池的母线电压为Vd,放电深度为Cd,蓄电池容量为C。其Simulink模型如图9所示。
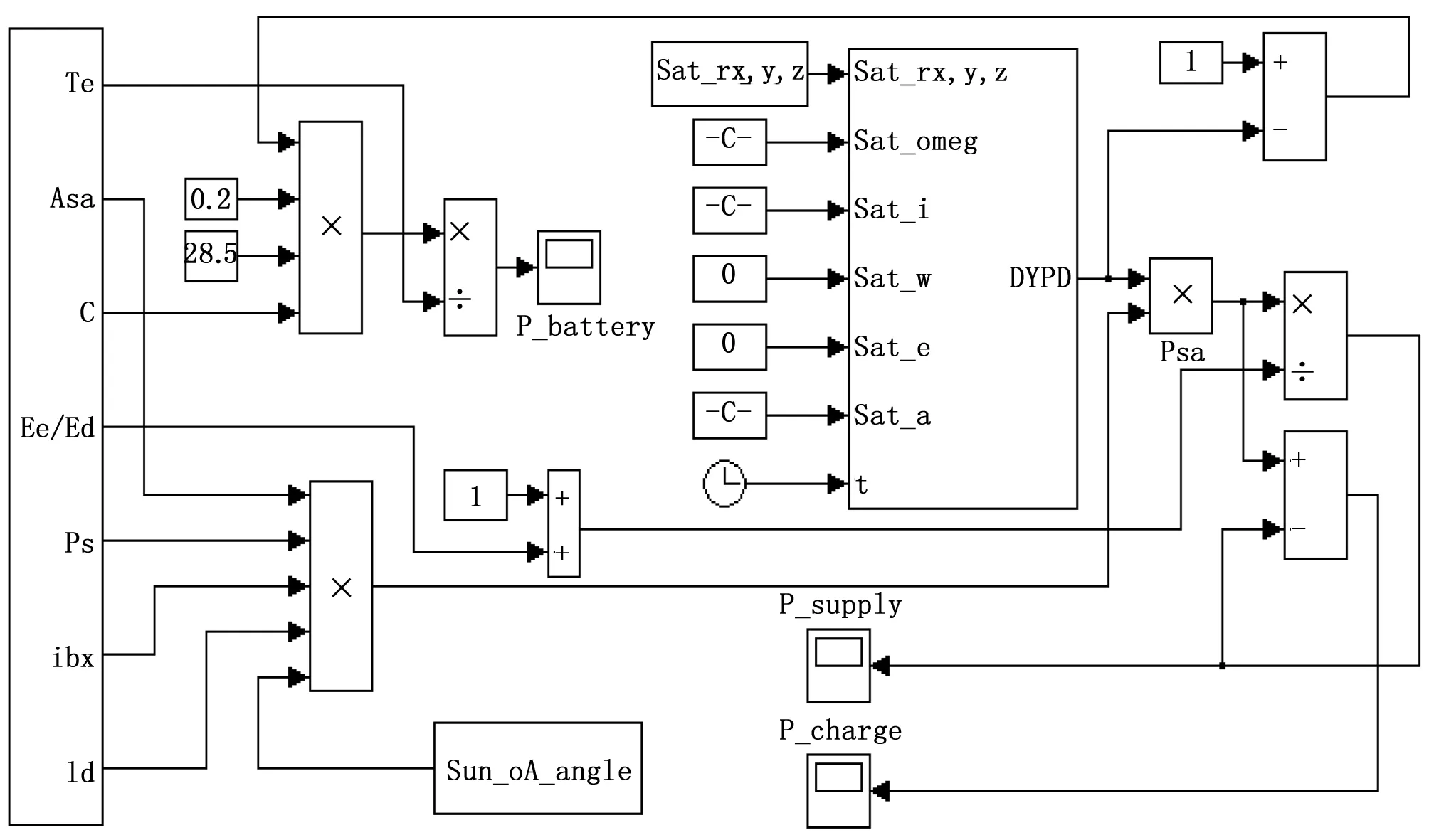
图9 电源功率Simulink模型
2.4 仿真分析
2.4.1 仿真参数
根据本文设计的卫星电源模块Simulink模型,确定如表1所示的仿真参数。仿真开始时间为2017年3月1日12:00时,运行时间6小时,仿真结果需满足航天器功率需求。

表1 电源模块仿真参数
2.4.2 仿真结果与分析
太阳能帆板法线与太阳光夹角如图10所示,卫星地影期判断以及蓄电池输出功率,太阳能帆板充放电功率仿真结果如图11所示。
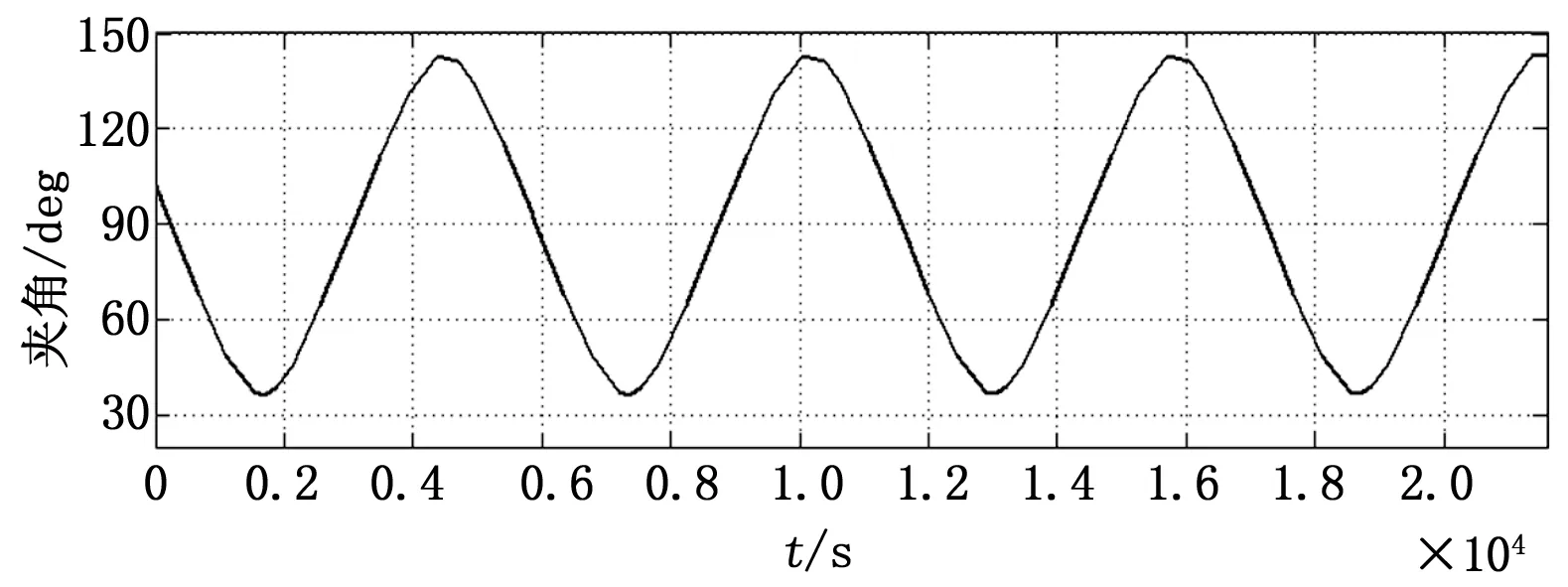
图10 太阳能帆板法线与太阳光夹角
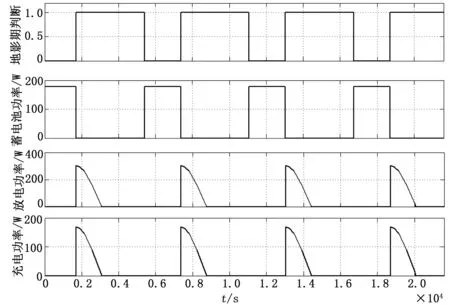
图11 地影期判断及功率
由图10可知,太阳光与帆板法线夹角不断改变,导致太阳光无法固定地照射到帆板上,所以太阳能帆板的供电功率和充电功率并不稳定,波动较大,如图11所示。为了解决这一问题,应对模型进行改善。修改后的模型帆板姿态由自身控制,而不是固定在航天器上,帆板采用对日定向模式,故帆板法线与太阳光夹角为零。修改后的帆板供电功率和充电功率如图12所示。
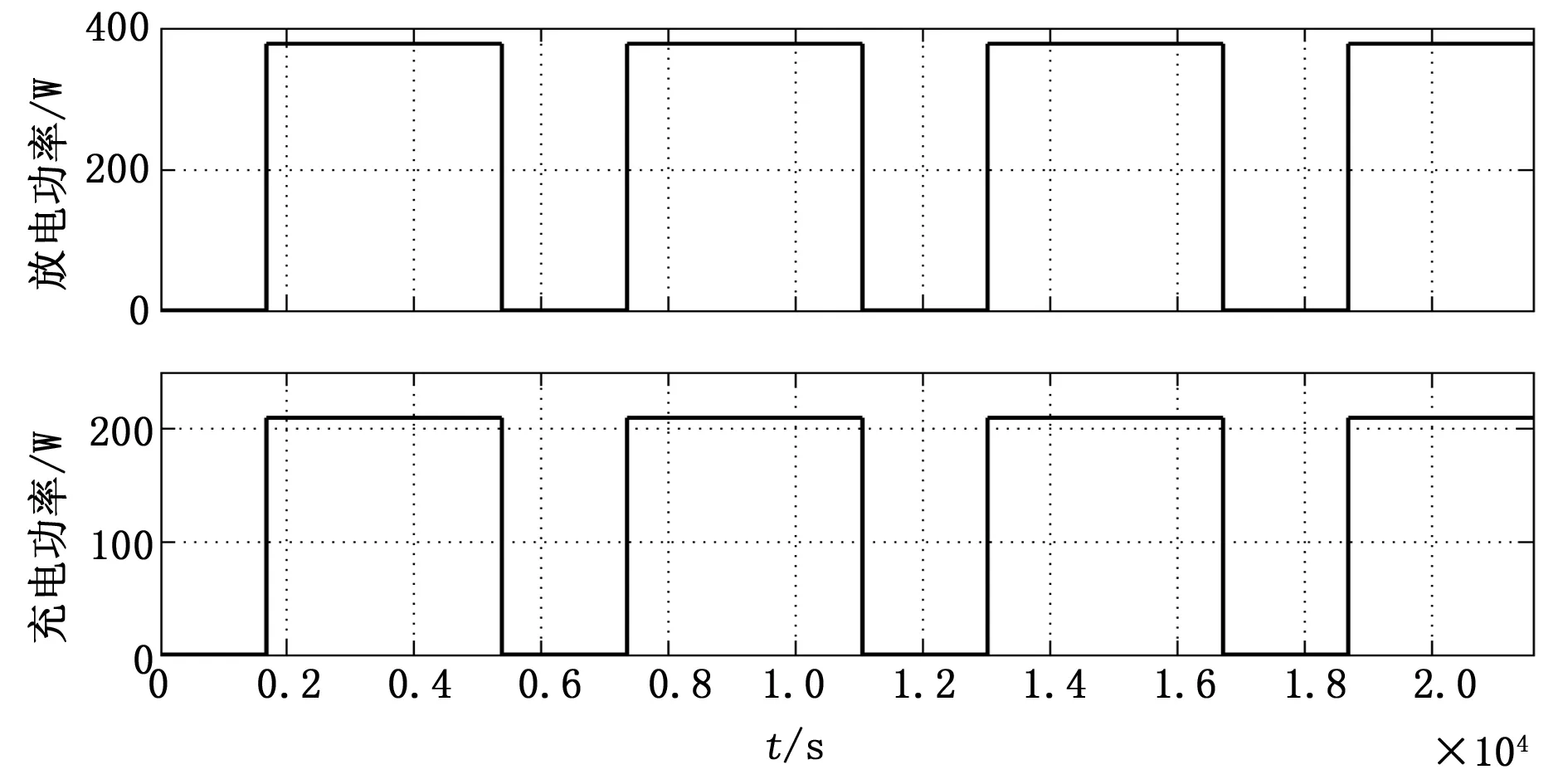
图12 太阳能帆板对日定向下的功率
改进后的太阳能帆板功率稳定,光照期供电功率376.506 W,地影期输出功率177.778 W,满足航天器功率需求。
3 总结与展望
当前世界各国都在积极研究快速响应模块化航天器,以美国为代表的军事强国也把快速响应作为航天发展规划的重点。所以,必须顺应时代趋势,把握机会,抢占先机,为我国快速响应卫星的稳健发展奠定坚实基础。
为了实现快速响应,本文以卫星电源模块为研究对象,搭建了卫星电源模块Simulink模型,通过对其进行仿真可以得到太阳能帆板面积,蓄电池容量等关键参数,利用这些参数就可以实现卫星电源模块的快速选取。
基于快速响应的理念,本文电源模块模型的建立就是从这个角度出发,旨在通过对模型的仿真,完成电源模块的快速选择。电源模块快速响应应用模式想定为:由电源模块到任务。不同电源模块能够满足不同任务。比如本文的仿真结果,当帆板面积为4.003 m2时,能够提供的供电功率为376.506 w。所以,我们可以结合我国当前形势,对可能发生的典型任务进行分析,计算出对应的电源模块参数,然后进行生产制造,一旦需要就可以直接应用。同时我们也可以有规律的改变模型初始条件进行仿真,得到满足不同任务需求的系列化电源模块,之后对系列化电源模块进行优化分析,目的是设计出合理的系列化数量,使其能够最大程度地满足所有任务。最后要对确定好的电源模块系列进行生产,仓储。
其优点为:1)快速,当有突发任务时,可直接从仓储的系列化模块中选择应用,节省了仿真计算和生产研制的时间;2)经济,经过优化分析的电源模块能够以最少的系列数最大程度的满足不同任务需要,所以我们不必生产各种型号的电源模块,故减少了模块的仓储数量,同时也减少与之相关的财力,物力,实现效益最大化。
4 结束语
本文基于模块化航天器快速集成测试,对模块化航天器进行建模仿真研究。以电源模块为例,对其数学模型及Simulink模型详细描述,并对仿真结果进行分析,同时与快速响应理念相结合,研究电源模块快响应用模式,这种全新的理念势必会增强我国应对突发航天任务的能力。
[1] 李 晶. 快速响应空间研究现状[J]. 宇航动力学学报, 2011(1):103-105.
[2]赵良玉, 贺 亮. 天基快速响应体系[J]. 航天器工程, 2013(4):21-26.
[3]赵丽娜. 运载火箭快速响应技术发展研究[D]. 哈尔滨:哈尔滨工业大学, 2013:32-33.
[4]陈小前, 袁建平, 姚 雯, 等. 航天器在轨服务技术[M]. 北京: 中国宇航出版社, 2009.
[5]李新洪, 张永乐, 姜 南. 模块化航天器应用需求及应用体系[J]. 装备学院学报, 2014(8):70-74.
[6]张科科, 朱振才, 夏 磊. 小卫星模块化设计技术分析[J]. 航天器工程, 2015, 24(6):107-115.
[7]田爱平, 宝音贺西, 李俊峰. 组合式航天器概念及构型变换最优脉冲控制[J]. 航天控制, 2013, 31(2):62-68.
[8]徐 明, 王金龙. 分离模块化航天器系统评估和优化设计研究[J]. 上海航天, 2015, 32(6):8-16.
[9]沈怀荣,等. 航天任务分析与设计基础[M]. 北京:科学出版社,2015.
[10]毛 悦, 宋小勇, 贾小林,等. 北斗导航卫星地影状态分析[J]. 测绘学报, 2014(4):353-359.
[11]贾向华, 徐 明, 陈罗婧. 近地轨道卫星的地影预报算法[J]. 宇航学报,2016(1):39-47.
[12]马世俊. 卫星电源技术[M]. 北京:中国宇航出版社,2001.
SimulationofModularSpacecraftPowerSystem
He Guangsong1,Li Xinhong2,Wang Qian1
(1.Graduate School,Academy of Equipment,Beijing 101416, China;2.Department of Space Equipment,Academy of Equipment,Beijing 101416, China)
The rapid response of modular spacecraft to rapidly improve the ability of space information support is of great significance, so in order to study the application of rapid response of modular spacecraft, this paper based on the rapid response studies the modular spacecraft, first introduces the modular spacecraft and the method of its rapid integration test, then taking the power system of modular spacecraft as an example, builds the Simulink model by mathematical model and mainly analyzes the area of panel, battery capacity, as well as satellite on-orbit power, finally, the accuracy of the model is verified by simulation, which lays the foundation for the rapid response of modular spacecraft and the paper presents a application model of rapid response of modular spacecraft power system.
rapid response; modular spacecraft; power system; simulation
2017-04-14;
2017-05-02。
贺广松(1992-),男,黑龙江齐齐哈尔人,硕士,主要从事航天器应用技术方向的研究。
李新洪(1972-),男,陕西西安人,博士,教授,主要从事航天器设计与应用方向的研究。
1671-4598(2017)10-0137-04
10.16526/j.cnki.11-4762/tp.2017.10.036
TP391
A
猜你喜欢
中学生博览(2022年9期)2022-06-21
汽车实用技术(2022年11期)2022-06-20
太阳能(2021年10期)2021-11-03
计算机与数字工程(2021年4期)2021-10-09
北京航空航天大学学报(2021年7期)2021-08-13
科学家(2021年24期)2021-04-25
环球飞行(2021年12期)2021-02-07
上海航天(2020年3期)2020-07-01
装备环境工程(2018年7期)2018-08-01
汽车文摘(2017年3期)2017-12-08