
深海矢量噪声场声传播特性研究
2017-11-02 06:30杜敬林马忠成
船舶力学 2017年10期
杜敬林,马忠成,李 然,张 波
(大连测控技术研究所,辽宁 大连116013)
深海矢量噪声场声传播特性研究
杜敬林,马忠成,李 然,张 波
(大连测控技术研究所,辽宁 大连116013)
矢量声压振速联合处理是建立在信号的声压和质点振速相位基础上,海洋环境边界对声传播的影响将改变矢量声场声压和质点振速的幅度和相位特性。文章根据南海环境条件和水下目标辐射噪声测量采用矢量简正波理论估算海面非相干偶极子噪声源和水下点声源矢量场的幅度和相位随深度的变化,并对矢量水听器测量系统获取的南海典型深度上的背景噪声数据进行了分析。结果表明:深海背景噪声声压谱级在500 Hz以下基本上不随深度变化,在500 Hz-3 kHz频段浅深度背景噪声声压谱级略高于较深深度的背景噪声声压谱级;背景噪声的垂直质点振速谱级要小于声压和水平质点振速谱级。
矢量水听器;背景噪声;辐射噪声;南海
0 引 言
海洋环境噪声是水声信道中的干扰背景场。矢量水听器可以同时、共点获取声场的声压和质点振速信号。随着矢量水听器和矢量信号处理的发展,矢量水听器已广泛应用于舰船噪声测量、噪声源分离、水下目标特征提取与识别、水声警戒、远程探测、水雷声引信、鱼雷探测、水下目标定位与导航、分布式传感器网络和声强、声功率测量、浮标/潜标等领域。在20世纪70年代末80年代初,前苏联远东科学研究院设计和研制了固定式和自由漂浮式矢量水听器测试系统对不同海域的海洋背景噪声进行了测试和分析,并用于低噪声潜艇测量和分析[1-2]。
声压和质点振速联合处理是建立在声压与质点振速信号是完全相干、相位一致的基础上[3]。理论上,将声压振速复合传感器的声压与质点振速相位差在自由场条件下进行测量,在测试应用时进行相位差修正,即可保证声压和质点振速信号是同相位的。然而,实际应用中,大多数条件下都难以满足自由场声学条件。在受海面海底边界影响的海洋波导环境中,声压和质点振速的相位差将随着频率、深度和距离的变化而变化。本文结合南海海洋环境噪声和舰船辐射噪声测量,采用矢量场简正波理论对海面噪声场和目标信号场的声压、水平质点振速和垂直质点振速的强度以及声压与水平质点振速、垂直质点振速的相位差进行了分析,并对船载式矢量测量系统南海条件下获取的典型深度的背景噪声特性进行了分析,为基于矢量水听器的水下目标辐射噪声测试技术和分析方法提供理论基础。
1 矢量简正波理论
声场为简正波和侧面波之和,在远处可以仅考虑简正波[4]。
根据简正波理论和矢量声场理论可知,位于深度zs处的简谐点源在空间某一位置r,()z处激发的矢量声场可以表示为[5-6]:

其中:vn=κn+iβn为简正波的复本征值,κn为第n号简正波波数水平分量,即本征值的实部;βn为简正波的指数衰减因子,即本征值的虚部;ψn()z为简正波的本征函数。
在对海底声学特性缺乏充分认识的条件下,采用相干传播损失描述声场结构没有太大的物理意义[7]。本文采用非相干传播损失描述声压和质点振速的矢量声场,根据传播损失的定义,声压、水平质点振速和垂直质点振速的非相干传播损失可以表示为:

声压与水平质点振速和垂直质点振速之间的相位差可以表示为:



(9)式中的第一项是实数,是各阶简正波自身的水平声强流,是有功分量;第二项是复数,是不同阶简正波之间的相互干涉,包含了有功分量和无功分量;(10)式中的第一项是虚数,是各阶简正波自身的垂直声强流,是无功分量;第二项是复数,是不同阶简正波之间的相互干涉,包含了有功分量和无功分量。
深度z′的海面非相干偶极子cosθ噪声源声压、水平质点振速和垂直质点振速强度的简正波模式可以表示为[6,8-9]:

海面附近,声源强度q取为:

其中:Q是与声源功率特性有关的量。
2 矢量声场数值计算
为了便于计算和分析,假定海水声速分布水平方向是均匀的,只考虑垂直方向的声速分布(声速垂直分布如图1(a)所示),海底为半无限空间,且在分析的距离上(2 km以内)认为海底是平整的。海底密度为1.8 g/cm3,声速1 600 m/s,传播衰减0.3 dB/λ,并假定海面噪声为非相干偶极子噪声源,在计算的频点上噪声源功率是相同的,作为点声源的目标在各频点的声源级也是相同的。
2.1 海面噪声和点声源的声压与振速分布
图 1(b)和(c)分别是根据(1)、(2)、(3)式和(11)、(12)、(13)式计算的点声源目标(位于海面)和海面偶极子噪声源典型频点的声压和质点振速强度的垂直分布。
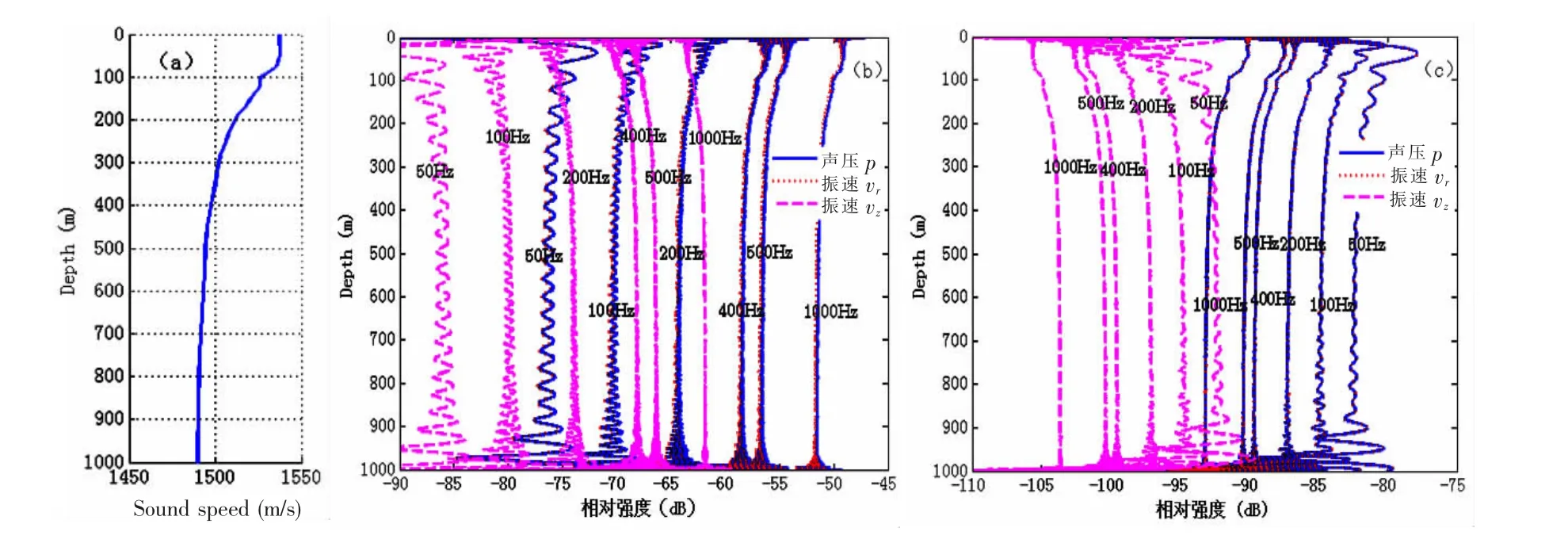
图1 声速垂直剖面及点声源和海面噪声的声压与质点振速强度随深度的变化Fig.1 Vertical profile of sound velocity and acoustic pressure and particle velocity intensity with depth for point source and surface-generated noise
由图可知:海面点声源目标与海面偶极子噪声源具有相类似的垂直分布特性,即:海面偶极子噪声源和海面点声源的声压和水平质点振速强度相当,而垂直质点振速强度比声压和水平质点振速强度要小。这与文献[3]计算点声源目标的垂直质点振速比声压和水平质点振速的传播损失大的结果是一致的。
为此,引入水平质点振速与垂直质点振速强度差表述海面偶极子噪声源和海面点声源矢量场特性。 由(1)、(2)、(3)式和(11)、(12)、(13)式和非相干传播损失的定义可得,海面偶极子噪声源和点声源目标的水平质点振速与垂直质点振速的强度差分别为:


图2 海面噪声和点声源位于水下10 m与300 m时水平与垂直质点振速强度差随深度的变化Fig.2 Intensity difference between horizontal and vertical particle velocity with depth for surface-generated noise and point source at a depth of 10 m or 300 m
依据(15)式和(16)式,图 2(a)、(b)和(c)给出了海面噪声和声源位于水下 10 m、300 m 时水平质点振速与垂直质点振速强度差随深度的变化。由图2可知:
(1)海面偶极子噪声源和点声源的水平质点振速与垂直质点振速强度差基本上是相同的,水平质点振速强度比垂直质点振速强度要大10-15 dB左右。
(2)相比海面偶极子噪声源,点声源的水平质点振速与垂直质点振速强度差随着深度起伏较大,且与声源的深度有关;在海面海底处,无论是非相干偶极子噪声源还是点声源,其水平质点振速与垂直质点振速的强度差起伏比较剧烈,主要是因为海面海底声学边界的不连续性引起的。
2.2 声源典型深度下的声压与质点振速相位差特性
图3和图4分别给出了点声源位于水下150 m,声压与水平质点振速和垂直质点振速相位差随频率和距离的变化(接收深度100 m)以及声压与水平质点振速和垂直质点振速相位差随频率和深度的变化(水平距离50 m)。
由声压与质点振速相位差随频率、距离和深度的变化计算结果可知:
(1)声压与水平质点振速之间的相位差接近于0°。这主要是由于简正波之间的相互干涉,水平声强流的无功分量远小于有功分量。
(2)声压与垂直质点振速之间的相位差随着频率、距离和深度的变化而变化。当声源和接收器深度一定时,声压与垂直质点振速之间的相位差在一定的频率间隔内和一定的水平距离范围内呈现周期性的变化;当声源深度和接收器距离一定时,声压与垂直质点振速之间的相位差随着频率和深度呈现-90°至 90°的交替变化。

图3 声源位于水下150 m时声压与水平和垂直质点振速相位差随频率和距离的变化Fig.3 Phase difference between acoustic pressure and horizontal or vertical particle velocity with frequency and horizontal range for source at a depth of 100 m

图4声源位于水下150 m时声压与水平和垂直质点振速相位差随深度和频率的变化Fig.4 Phase difference between acoustic pressure and horizontal or vertical particle velocity with frequency and depth for source at a depth of 150 m
图5 给出了频率为50 Hz的声源位于水下150 m时声压与水平质点振速和垂直质点振速之间的相位差随距离和深度的变化。图6和图7分别是频率为50 Hz和500 Hz的声源位于水下150 m时声压与质点振速的相位差随距离(接收深度100 m)和深度(水平接收距离50 m)的变化。
由图5、图6和图7可知:
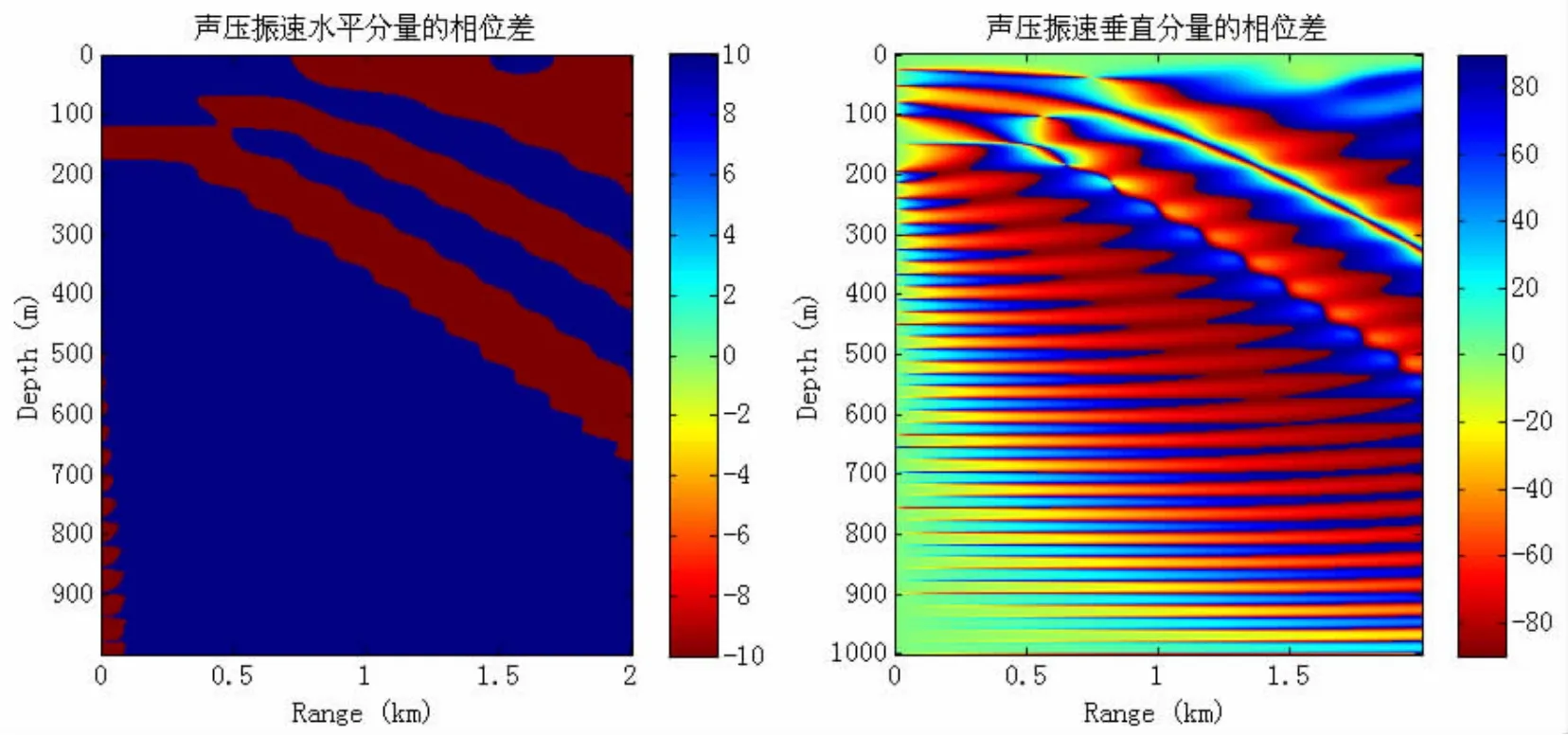
图5 50 Hz声源位于水下150 m时声压与水平振速和垂直质点振速之间的相位差随距离和深度的变化Fig.5 Phase difference between acoustic pressure and horizontal or vertical particle velocity with depth and horizontal range for source of 50 Hz at a depth of 150 m

图7 500 Hz声源位于水下150 m时声压与质点振速相位差随距离和深度的变化Fig.7 Phase difference between acoustic pressure and particle velocity with horizontal range or depth for source of 500 Hz at a depth of 150 m
(1)当海深一定时,声源频率越高,激发的简正波模态越多,声压与垂直质点振速之间的相位差随着深度的变化越剧烈;声源频率越低,激发的简正波模态越少,深度间隔就越长。从声能流观点来讲,垂直声能流的符号将随着深度呈现正负交替变化,当频率低至海洋波导中只存在两阶简正波时,声压与垂直质点振速之间的相位差在深度方向上的变化将不大于两个周期,这正是文献[10]利用声能流的符号去判定水下声源深度或水上水下目标识别的理论基础。
(2)当接收器深度增加至一定深度时,声压和垂直质点振速之间的相位差将趋近于0°,即声压与垂直质点振速趋近于同相位。
3 试验数据分析
3.1 船载式矢量水听器测量系统
船载式矢量水听器测量系统由测试载体、中继装置和试验室控制处理网络组成。如图8所示。接收声设备包括矢量水听器和标准水听器,矢量水听器采用同振式四分量加速度型矢量水听器,直径21 cm,水中接近于中性浮力,工作频段20 Hz-1 kHz;标准水听器工作频段20 Hz-50 kHz。水听器接收信号经中继装置中的水下电子舱模数转换后由金属铠装缆传输至测量船远程采集控制单元。
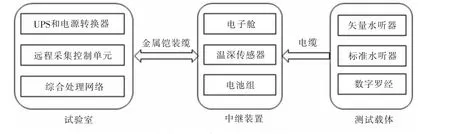
图8 船载式矢量水听器测量系统组成Fig.8 Constituent of shipborne vector-sensor measuring system
为减小流噪声和低频振动对矢量水听器测量系统的影响,矢量水听器和标准水听器采用弹性悬挂装置安装于测试载体内部。为了减小海面风浪以及测量船的起伏对矢量水听器测量系统的影响,整个湿端设备在水下呈中性浮力,分别在测试载体和中继装置之间的电缆以及中继装置和水面之间的金属铠装缆采取减振隔振机构和阻尼机构。
3.2 海洋背景噪声测试
利用船载式矢量水听器测量系统在南海(北纬17°20′,东经120°22′)进行了2个航次的海洋背景噪声测量。
测试海区等温层厚度在50 m左右,声速垂直分布如图1(a)所示,海面波浪波长在100 m左右。测试时,中继装置和测试载体远离测量船300 m以上,测试载体远离中继装置15m,南海背景噪声测试布放状态如图9(a)所示,测试过程中试验船(试验船为双体船)关闭辅机,整个系统采用UPS电源供电,海面无行船干扰。图9(b)是利用安装在中继装置上的水下摄像机监视的测试载体的水下状态。

图9南海背景噪声测量方法和水下状态Fig.9 Measuring method and underwater state of ambient noise in South China Sea
3.3 试验数据分析
图10 是测试传感器在不同深度下测量的海洋背景噪声声压谱级。其中:30 m和150 m深度上的背景噪声谱级是水下中继装置在水平方向上远离测量船船尾300 m左右的测量结果,250 m和300 m深度上的背景噪声声压谱级是水下中继装置在水平方向上远离测量船船尾30 m左右的测量结果。测试时的环境参数如表1所示。图11是不同深度下矢量水听器接收到的海洋背景噪声声压和质点振速谱级。由图可知:
(1) 海洋背景噪声声压谱级随深度没有显著变化。250 m和300 m深度下的背景噪声声压谱级具有较高的相似性,且在60 Hz以上频段,背景噪声的水平质点振速谱级和垂直质点振速谱级相当,即当达到一定深度时,背景噪声在水平方向上是趋于各向同性的。在100 Hz-3 kHz频段,30 m深度上的背景噪声声压谱级比150 m深度的背景噪声声压谱级要高2-5 dB左右。一方面是因为风成噪声(主要集中在500 Hz-3 kHz频段)随着深度增加而减小;另一方面当测量载体布放于30m,该深度小于涌浪半波长,受海面波浪影响比较严重,测试系统的外部干扰有所增加。因此,浅深度不利于水下目标辐射噪声测量。在实际测试时,水下传感器布放深度应大于波浪半波长,以避开海面波浪或涌浪的影响。
(2)在100 Hz以上频段,海洋背景噪声的垂直质点振速谱级比水平质点振速谱级和声压谱级平均要低2-4 dB;在250 m和300 m深度上,60 Hz以下频段,背景噪声的垂直质点振速谱级与水平质点振速谱级无明显差别。这主要是因为在低频段主要是远处行船的辐射噪声,而在中高频段更接近于均匀分布的海面噪声源分布模型,但并非简单的非相干偶极子噪声源模型。因此,不同深度下背景噪声测量结果与海面噪声场理论计算结果基本上是一致的。

图10 南海不同深度海洋背景噪声声压谱级Fig.10 Acoustic pressure spectrum level of ambient noise for different depth in South China Sea

表1 背景噪声测试时的环境参数Tab.1 Environment parameters of ambient noise measuring


图11 南海不同深度海洋背景噪声声压和质点振速谱级Fig.11 Acoustic pressure and particle velocity spectrum level of ambient noise for different depth in South China Sea
4 结 语
本文采用简正波理论对海面非相干偶极子噪声源和水下点声源的声压、质点振速强度在深度上的传播特性以及水下点声源的声压与质点振速的相位差随深度的变化进行了理论估算,并利用船载式矢量水听器测量系统对南海不同深度下的海洋背景噪声进行了测量,获取了南海典型深度下矢量噪声场声压和质点振速谱级,得到了以下初步结论:
(1)对点源来说,声压与水平质点振速之间的相位差基本不变,而声压与垂直质点振速之间的相位差随着深度、距离和频率的变化而变化。
(2)海洋环境背景噪声声压谱级随深度没有显著变化;在100 Hz-3 kHz频段浅深度(涌浪半波长内)背景噪声声压谱级比较深深度的背景噪声声压谱级高2-5 dB。
(3)背景噪声的垂直质点振速谱级比声压和水平质点振速谱级要小;当测试深度达到一定深度时,背景噪声在水平方向上是趋于各向同性的。
海洋环境背景噪声是一个时变、空变的随机过程,受风、浪尤其是涌浪的影响,深海条件下基于矢量水听器的背景噪声获取与分析比浅海(波浪波长相对较短)测试更为复杂。因此,为深入了解深海条件下海洋环境背景噪声的矢量特性还需要获取大量的测试数据作支撑。
[1]Shchurov V A.Vector acoustics of the ocean[M].Vladivostok:Dalhauka,2003.
[3]周士弘.分层介质波导中的声矢量场传播[J].哈尔滨工程大学学报,2004,25(1):38-42.Zhou Shihong.Acoustic vector fields propagation in horizontal-stratified waveguide[J].Journal of Harbin Engineering U-niversity,2004,25(1):38-42.
[4]惠俊英,孙国仓,赵安邦.Pekeris波导中简正波声强流及其互谱信号处理[J].声学学报,2008,33(4):300-304.Hui Junying,Sun Guocang,Zhao Anbang.Normal mode acoustic intensity flux in Pekeris waveguide and its cross spectrum signal processing[J].ACTA Acustica,2008,33(4):300-304.
[5]孙 梅,李风华,张仁和.浅海声场垂直振速与水平振速相关特性及应用[J].声学学报(ACTA Acustica),2011,36(2):215-220.Sun Mei,Li Fenghua,Zhang Renhe.Correlation characteristics of vertical particle velocity and horizontal particle velocity in shallow water and the application[J].ACTA Acustica,2011,36(2):215-220.
[6]彭汉书.浅海声场矢量物理特性及应用研究[D].北京:中国科学院研究生院,2007:7-51.Peng Hanshu.Research on physics properties and application of the acoustic vector in shallow water[D].Beijing:Chinese Academy of Sciences Dissertation,2007:7-51.
[7]Jensen F B,Kuperman W A,Porter M B,Schmidt H.Computational ocean acoustics[R].American Institute of Physics,1994.
[8]Kuperman W A,Inegenito F.Spatial correlation of surface generated noise in a stratified ocean[J].JASA,1980,67:1988-1996.
[9]Harrison C H.Formulas for ambient noise level and coherence[J].JASA,1996,99:2055-2066.
[10]孙国仓.浅海矢量声场及其信号处理[D].哈尔滨:哈尔滨工程大学,2008.Sun Guocang.Shallow water acoustic vector field and its signal processing[D].Harbin:Harbin Engineering University Dissertation,2008.
Research on the propagation characteristics of vector noise field in deep sea
DU Jing-lin,MA Zhong-cheng,LI Ran,ZHANG Bo
(Dalian Scientific Test and Control Technology Institute,Dalian 116013,China)
The signal processing using combined acoustic pressure and particle velocity components is based on the phase between acoustic pressure and particle velocity,but the environmental boundary effect on sound propagation will change amplitude and phase characteristics of acoustic pressure and particle velocity in acoustic vector fields.In this paper,the amplitude and phase with depth in acoustic vector fields about surface-generated incoherent dipole noise and underwater point source are estimated based on vector normal mode theory according to the environmental conditions and underwater target radiated noise measurement in South China Sea.And,it is analyzed that ambient noise data of typical depth
by the acoustic vector-sensor measuring system in South China Sea.The results show that the acoustic pressure spectrum level of ambient noise below 500 Hz basically does not change with depth,the acoustic pressure spectrum level of ambient noise from 500 Hz to 3 kHz at a shallow depth is higher than a deeper depth,and the vertical particle velocity spectrum level of ambient noise is less than the acoustic pressure and horizontal particle velocity spectrum level in deep ocean.
vector-sensor;ambient noise;radiated noise;South China Sea
O427.2
A
10.3969/j.issn.1007-7294.2017.10.014
1007-7294(2017)10-1299-10
2017-07-04
国防基础科学研究基金资助(41303080205)
杜敬林(1979-),男,硕士研究生,高级工程师,E-mail:dujinglin521@sohu.com;
马忠成(1966-),男,研究员。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
噪声与振动控制(2022年3期)2022-07-04
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
应用科技(2020年1期)2020-06-18
压电与声光(2019年4期)2019-08-29
汽车工程(2018年12期)2019-01-29
地震研究(2017年3期)2017-11-06
电测与仪表(2016年9期)2016-04-12
应用海洋学学报(2015年1期)2015-11-22
