
导向滤波优化的单幅去雾算法
2017-11-01 07:19胡晨辉吕伟杰
传感器与微系统 2017年10期
胡晨辉, 吕伟杰, 张 飞
(天津大学 电气与自动化工程学院,天津 300072)
导向滤波优化的单幅去雾算法
胡晨辉, 吕伟杰, 张 飞
(天津大学电气与自动化工程学院,天津300072)
针对暗原色先验的单幅去雾算法计算复杂度高,无法满足交通监控系统中实时性需求,且大气光易受白色物体影响,以及天空区域易失真的缺陷和景物边界出现白边现象,提出了基于暗原色改进的快速去雾算法。采用四叉树搜索的算法对大气光进行精确估计,利用最大值滤波后的差值图像估计出天空区域,对透射率进行补偿,利用导向滤波器改进透射率并结合大气散射模型恢复无雾图像。实验结果表明:改进算法改善了原算法去雾效果的同时也提高了算法的速度。
图像去雾; 导向滤波; 暗原色先验; 四叉树搜索; 最大值滤波
0 引 言
雾或霾对场景中的反射光吸收和散射作用导致现场的能见度较小、视觉效果较差。雾霾的存在成为很多计算机视觉应用如视频监控、遥感、导航、目标识别等需要解决的重要问题。
目前,广泛采用基于物理模型的去雾算法,由于未知场景信息,因此,大气散射模型是一个欠定方程,无法通过求解方程求出场景的反射率。为了获得深度信息,一是通过其他设备,二是基于先验信息,估算大气散射模型中的参数,还原场景反射率。由于大部分情况无法通过设备获得图像所需深度信息,因此,基于先验的单幅去雾算法为主要研究领域。Tan R T等人[1]基于晴天图像的对比度高于雾天的假设,将复原图像的局部对比度最大化,但是该方法造成原图像颜色过于饱和。Fattal R等人[2]基于物体表面色度和介质传播具有局部不相关的先验假设,通过独立成分分析估算出图像反照率得到介质投射率从而复原无雾图像,由于浓雾图像缺少颜色信息且噪声较多,因此,该方法不适合浓雾图像的复原。Tarel J P等人[3]利用中值滤波的方法对大气耗散函数进行了估计,应用色调映射得到去雾图像,但是中值滤波的使用易引起光环(Halo)效应。He K等人[4]提出暗原色先验的原理,取得很好的效果,但是由于使用软抠图会增加计算量,增加去雾时间,不能用于实时处理,且易受白色物体的影响导致失真,对天空区域的效果不理想。
针对He K[4]的速度改进提出了各种算法,Tripathi A K等人[5]采用双边滤波器,Xiao C等人[6]和Lü X等人[7]利用联合双边滤波,这些算法都会加快速度,但在细节分解以及高动态范围压缩过程中产生[4]梯度反转现象,即Halo现象。为此,He K[8]本人提出了导向滤波算法,算法简单,速度得到明显提升。
针对以上问题,提出了一种导向滤波优化的去雾算法,通过对灰度图像利用四叉树搜索算法准确估计出大气光,通过对最小通道图最大值滤波和最小值滤波求出差值通道,找出天空区域,对天空区域的透射率进行补偿,利用导向图像,复原图像,最后与其他算法进行了对比。
1 暗原色去雾方法
1.1 物理模型
在计算机视觉和计算机图形学中,大气散射物理模型的雾天成像方程[4]可以表示为
I(x)=J(x)t(x)+A[1-t(x)]
(1)
式中x为图像中像素点的位置;I为接收设备收到的有雾图像;J为需要经过处理得到的无雾图像;A为大气光成分;t为透射率,可以表示为
t(x)=e-βd(x)
(2)
式中β为大气散射系数;d为场景深度。可知,如果对接收到的图像中剔除环境光部分,并进行补偿,便可以得到无雾图像。
1.2 暗原色先验[4]
在非天空的局部区域里,图像中至少存在一个颜色通道具有很小的值。根据此统计规律,彩色图像的暗原色信息可以用式(3)获取
(3)
Jdark(x)→0
(4)
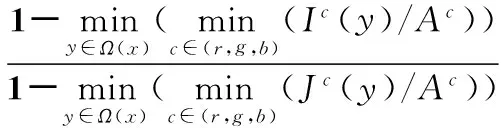
由此,选择合适大小的窗口,可以得到估算透射率
(5)
式中 在He0算法中设w为0.95,为了保持远处物体留有一定的雾,达到视觉上的朦胧感。
2 导向滤波优化算法
2.1 大气光估计
为了准确求得无雾图像,首先准确估计大气光A。在之前的大部分单幅去雾算法中,均将图像中最亮的值作为大气光。文献[1,3,4]方法均会发生偏差,因为当图像中有白色建筑、白色汽车、白云等白色物体时,大气光的值容易误选这些物体的颜色值而导致大气光偏大。
文献[9~11]大都会受到白色物体的影响,如果为了滤除白色物体,增加结构元素的尺寸(暗通道窗口半径),当白色物体较大时,将天空区域滤掉,导致估计出的大气光值会发生严重的偏差。通过对大量的照片观察,Yu J等人[12]发现天空区域具有特征:1)亮度较高;2)灰度平坦;3)位置偏上。本文将满足以上区域的特征的集合定义为天空区域。
本文提出了改进四叉树搜索的算法,步骤如下:
输入:原始图像P;输出:全局大气光A。
1)读入图像P,灰度化处理,得到灰度图像B。
2)对图像B进行四叉树分割,顺时针依次标记为1,2,3,4。
3)利用式(6)分别计算(1)和(2)两区域的数值,其中mean(Bi)为序号对应的图像灰度均值,σi为对应图像灰度值的标准差。
4)比较θ2和θ1的值,数值大的图像重复步骤(2)和步骤(3)的过程,直到分割出的图像大小小于设定的阈值尺寸(30×30),停止搜索。
5)对所确定的区域假定为天空区域W。
6)为了避免所选图像中没有天空区域,对四叉树搜索所确定的区域W判断其方差σ2。若σ2≤0.01,说明该区域即为真正的天空域,然后在区域W求出最大值即为大气光;若σ2>0.01,则说明选定的区域非天空域,则按照亮度的大小从暗原色图中取前0.1%的像素点,在原始图像中找到与这些像素点对应值,为了避免白色物体的干扰,取这些像素值的平均值作为大气光值
θi=mean(Bi)-σi,i=1,2
(6)
图1(b)中的橙色区域即为天空区域,在此区域求最大值,即为大气光值,图1(c)中黄色区域为He K和Tan R T等人估计出大气光的区域,显然为白色区域,非天空域。
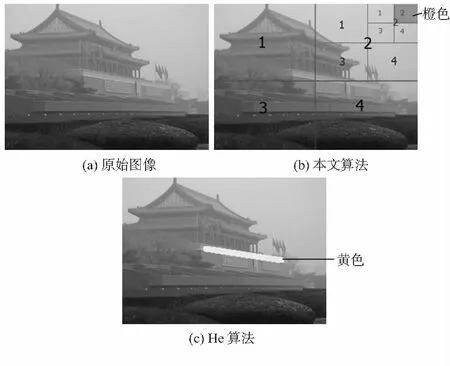
图1 He算法和本文算法大气光选取区域的比较
2.2 天空区域透射率的补偿
利用暗原色去雾算法虽然取得了不错的效果,但是当图像中含有较大天空区域,恢复的无雾图像会在该区域出现颜色失真。精确的透射可以表示为
(7)

图2 最小滤波最大滤波后的图像与差值图像
为此,需要对天空区域的透射率进行补偿。关键在于选择天空域,观察发现对暗通道最小滤波和最大值滤波后的天空区域的灰度值比较相似且灰度值均较大,而非天空区域的灰度值却差别很大。这是因为非天空区域容易被周围某个像素所侵蚀。对两次滤波后的图像求差得到差值通道,如图2(d)。在差值图像中容易发现,仅在天空区域的灰度值很小,因此,本文将差值图像中的低灰度区域认为天空区域,在该区域进行补偿。 在此基础上提出本文的差值滤波算法:
输入:原始图像P;输出:改进的透射率为tm。
1)读入图像P,最小化图像得暗通道;
2)对暗通道分别进行最大值滤波得图像darkmax和最小值滤波得图像darkmin;
3)对图像darkmax和darkmin求差,得差值图像darkcha;
4)在图像darkcha中设定阈值C,0≤C≤0.05的区域认为天空区域;
5)利用式(5)求出原始透射率;
6)利用式(8)对原始透射率的天空区域进行补偿
tm=min(n·(x),1)
(8)
(9)
式中n为透射率的补偿系数;α为一个非常小的数,防止分母为零,通常取为10-4;d为补偿系数,通常取d=0.001mean(darkmin)。图3(b)为He算法的原始透射率,图3(c)为本文算法对天空区域的透射率的改善,框内为天空区域。

图3 He算法和本文算法天空域透射率的比较
2.3 透射率的改进
为消除Halo效应,采用导向滤波器对原始的透射率进行细化改进。导向滤波器的原理:输入图像P决定了输出图像Q的轮廓,指导图像I决定了输出图像Q对场景结构信息的保持性。滤波结果和指导图像的局部非线性模型[10]为
Qi=akIi+bk,∀i∈wk
(10)

(11)
式中ε为用于防止ak过大的正规化系数。通过线性回归求出最优的ak和bk。
2.4 还原图像
在估计出透射率和大气光之后,还原清晰的图像

(12)
式中t0为设置下限,用于防止t(x)趋近于0,本文t0=0.1。
3 实验结果与分析
为了验证提出算法的有效性和复原效果,本文利用Matlab2010软件平台,操作系统为Windows7,处理器主频为1.5GHz,系统内存为4GB。
3.1 主观评价
为了验证改进算法的复原效果,与He算法和Tarel算法进行比较。由图4(b)发现由于He算法对天空区域透射率的失效,天空区域发生了失真。Tarel算法颜色过于饱和,图像整体偏暗,且在边缘处有Halo效应。图4(d)为改进算法后的去雾图像,对比度明显提高,尤其体现在天空和植物上。由图4(c)同样发现Tarel算法在颜色上出现偏差。He算法去雾效果较好,但是在天空区域中的白云出现了色差。

图4 原始图像与3种算法复原图像的比较
3.2 客观评价
通过对比度(contrast),梯度(gradient),熵值(entropy)和时间(time)这些客观值对各种算法对比。标准差反映了图像的分散程度,是对一定范围对比度的测量。标准差越大,表示图像包含信息量越多,视觉效果越好。表1为图4中3种算法恢复图像的结果。

表1 3种去雾算法的性能对比
4 结束语
在暗原色算法的基础上,提出了四叉树搜索算法和最大值滤波补偿算法,有效地改善了He算法在大气光和天空区域的透射率以及避免了白边现象。同时也提高了去雾算法的速度,基本上可以实现实时性,是一种具有应用前景的算法。
[1] Tan R T.Visibility in bad weather from a single image[C]∥CVPR,2008:1-8.
[2] Fattal R.Single image dehazing[J].ACM Transactions on Graphics,2008,27(3):1-9.
[3] Tarel J P,Hautière N.Fast visibility restoration from a single color or gray level image[C]∥2009 IEEE 12th International Conference on Computer Vision,IEEE,2009:2201-2208.
[4] He K,Sun J,Tang X.Single image haze removal using dark channel prior[C]∥2013 IEEE Conference on Computer Vision and Pattern Recognition,IEEE,2010:2341-2353.
[5] Tripathi A K,Mukhopadhyay S.Single image fog removal using bilateral filter[C]∥2012 IEEE International Conference on Signal Processing,Computing and Control (ISPCC),IEEE,2012:1-6.
[6] Xiao C,Gan J.Fast image dehazing using guided joint bilateral filter[J].Visual Computer,2012,28(6-8):713-721.
[7] Lü X,Chen W,Shen I.Real-time dehazing for image and vi-deo[C]∥Conference on Computer Graphics & Applications,IEEE Computer Society,2010:62-69.
[8] He K,Sun J,Tang X.Guided image filtering.[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2013,35(6):1397-1409.
[9] Kumari A,Sahdev S,Sahoo S K.Improved single image and video dehazing using morphological operation[C]∥2015 International Conference on VLSI Systems,Architecture,Technology and Applications (VLSI-SATA),IEEE,2015:1-5.
[10] Park D,Park H,Han D K,et al.Single image dehazing with image entropy and information fidelity[C]∥IEEE International Conference on Image Processing,2014:4037-4041.
[11] Baig N,Riaz M M,Ghafoor A,et al.Image dehazing using quadtree decomposition and entropy-based contextual regularization[J].IEEE Signal Processing Letters,2016,23(6):1.
[12] Yu J,Liao Q.Fast single image fog removal using edge-preserving smoothing[C]∥1988 International Conference on Acoustics,Speech,and Signal Processing,ICASSP’88,2011:1245-1248.
Algorithmforsingleimagedehazingbasedonguidedfilteringoptimization
HU Chen-hui, LÜ Wei-jie, ZHANG Fei
(SchoolofElectricalEngineeringandAutomation,TianjinUniversity,Tianjin300072,China)
Aiming at problem that dark channel prior algorithm is computational complex and quite time consuming,can’t meet the demand of real-time in traffic surveillance system,and atmospheric light is easily affected by the white object,the limitation of distortion happens in the sky area and also the Halo phenomenon in the scene boundaries,a new defogging algorithm is proposed based on guided filtering,which firstly uses quad-tree search algorithm to accurately estimate atmospheric light and then uses the difference image obtained by the maximum value filtering to compensate the transmission rate in the sky area.Combine atmosphere physical scattering model to recover the haze-off image.Experimental result proves that the improved algorithm improves dehazing effect,at the same time,increase rate of algorithm.
image dehazing; guided filtering; dark channel prior; quad-tree search; the maximum value filtering
10.13873/J.1000—9787(2017)10—0129—04
2016—10—31
TP 391
A
1000—9787(2017)10—0129—04
胡晨辉(1991-),男,通讯作者,硕士研究生,主要研究方向为图像处理和无线传感器,E—mail:1538221832@qq.com。吕伟杰(1975-),女,博士,副教授,从事网络控制系统、小波网络、多模型控制理论、嵌入式系统、现场总线、无线传感器研究工作。
猜你喜欢
武汉工程大学学报(2022年2期)2022-05-05
测控技术(2019年4期)2019-09-20
中国眼镜科技杂志(2018年13期)2018-08-11
科技创新与应用(2017年35期)2017-12-19
智富时代(2017年6期)2017-07-05
智富时代(2017年6期)2017-07-05
诗潮(2016年5期)2016-05-14
现代计算机(2016年17期)2016-02-28
中国火炬(2015年11期)2015-07-31
电脑知识与技术(2014年11期)2014-06-18
