
宽域废气氧传感器的控制方法研究
2017-11-01 03:00:09黄云志
化工自动化及仪表 2017年2期
闵 兵 刘 杰 黄云志
(合肥工业大学电气与自动化工程学院)
宽域废气氧传感器的控制方法研究
闵 兵 刘 杰 黄云志
(合肥工业大学电气与自动化工程学院)
宽域废气氧传感器在汽车发动机空燃比控制系统中应用广泛,它对工作温度有严格要求,可通过控制泵电流实现空燃比测量。笔者研究温度和泵电流控制方法。将冷启动和PI控制方法相结合,缩短了传感器冷启动时间并提高了温度控制精度;针对泵电流模型参数的不确定性,研究了基于H∞回路成形的鲁棒PID参数整定方法。仿真实验结果表明:宽域废气氧传感器冷启动速度快,温度控制精度较高;泵电流控制调节时间短,稳态精度高。
宽域废气氧传感器 温度控制 泵电流 PID 冷启动
随着空气污染和能源紧缺问题的加剧,各国颁布的汽车排放标准越来越严格,这对汽车发动机空燃比控制提出了较高的要求。宽域废气氧(Universal Exhaust Gas Oxygen,UEGO)传感器与传统的开关型氧传感器相比具有空燃比测量范围宽、精度高的优点,在汽车发动机空燃比控制系统中应用广泛。但是,UEGO传感器对工作温度有严格要求,并且通过控制泵电流实现空燃比的测量时,必须配上控制器才可以正常工作,其温度和泵电流控制的好坏直接影响传感器的工作性能。因此,研究UEGO传感器的控制方法,具有重要的理论意义和工程应用价值。
国外UEGO控制器研究起步较早并已有成熟的产品。Poggio L等研究了UEGO控制器的硬件系统和控制方法,设计PID控制器控制泵电流,但是没有给出具体的控制算法[1]。Bolz S和Lugert G设计了UEGO控制器接口集成电路,通过检测氧浓差电池内阻进行温度控制,泵电流控制采用模拟PID控制,无法通过调整PID参数提高泵电流控制效果[2]。刘瑞祥等采用模拟电路设计了UEGO控制器,模拟PID电路控制泵电流造成参数调整不便,其温度控制没有形成闭环[3]。卢继飞采用专用接口芯片CJ125设计了UEGO控制器,温度控制时冷启动时间较长,CJ125内部采用模拟电路实现泵电流控制[4]。合肥工业大学DSP实验室研制了基于dSPACE平台的UEGO控制器系统,采用鲁棒PID控制算法控制泵电流,采用分段加热控制算法控制温度克服了非线性问题,但是传感器的冷启动加热时间较长[5,6]。
笔者基于系统辨识的实验建模方法建立温度和泵电流数学模型。针对温度对象的非线性和UEGO传感器的快速冷启动要求,采用了冷启动控制和PI控制相结合的温度控制方法。针对泵电流模型参数的不确定性,研究基于H∞回路成形的鲁棒PID参数整定方法。
1 UEGO传感器的结构和工作原理
笔者选用目前国内汽车市场广泛使用的德国Bosch公司的LSU4.9型UEGO传感器(以下简称LSU4.9)作为研究对象,其结构示意图如图1所示,主要由扩散障、泵电池、氧浓差电池、虚拟参考气体室及内置加热器等组成。LSU4.9采用了固定20μA的参考泵电流用于维持虚拟参考气体室内有充足的氧气作为氧浓差电池的参比气体。LSU4.9工作时需要维持固定的工作温度780℃,UEGO传感器拥有双电池结构(即氧浓差电池和泵电池),基于氧浓差电势原理和极限电流原理工作。当传感器温度满足要求时,通过控制泵电池上的泵电流,使扩散室里的氧分压维持在理论空燃比值,传感器的氧浓差电势为450mV。当泵电流控制稳定时,泵电池的泵氧运动和扩散室的气体扩散运动均处于动态平衡,此时的泵电流称为极限电流。通过检测极限电流可以计算废气中的氧含量或者还原性气体的含量,从而反映发动机空燃比的大小。

图1 Bosch LSU4.9型UEGO传感器结构示意图
2 温度控制
2.1 温度对象建模
通过检测UEGO传感器的氧浓差电池内阻间接测量传感器的温度,氧浓差电池内阻具有负温度系数热敏电阻特性,而且和传感器温度之间成非线性关系。当LSU4.9的温度在780±10℃范围内时,传感器的工作性能达到最佳。LSU4.9在780℃时对应的氧浓差电池内阻为300Ω。由于UEGO传感器的温度受到汽车废气温度波动的影响较大,所以对温度控制的稳态性能要求较高。当UEGO传感器处于冷启动状态时,发动机空燃比不能进行闭环控制导致汽车废气排污较大,温度控制时要尽可能缩短冷启动时间。但是直接采用大功率加热缩短冷启动时间会影响传感器的使用寿命和工作性能。
为了研究温度控制方法,需要对温度对象建模。笔者采用的是基于系统辨识的实验建模方法,在工作温度780℃附近小范围内进行开环动态实验获取建模输入输出数据,将非线性被控对象近似成线性被控对象。改变加热驱动电路的占空比产生阶跃输入信号,通过记录PWM占空比的阶跃数据和氧浓差电池内阻的响应数据,将两者分别作为温度被控对象的输入输出数据,采用基于OE模型预报误差的系统辨识方法进行建模,实际建立的数学模型为:
(1)
2.2 温度控制方法
由于UEGO传感器有冷启动时间,采用单一的PID控制方法时,控制时间较长而且很容易造成积分饱和。因此,笔者采用冷启动控制和PI控制相结合的温度控制方法,传感器先通过冷启动控制使传感器快速升温到工作温度,当温度达到780℃附近时切换到PI控制,以提高稳态控制精度。
2.2.1 冷启动控制
UEGO控制器开启工作后,温度控制算法首先采用的是冷启动控制。冷启动控制初始加热占空比为0.5,加热电压不超过LSU4.9所允许的最大初始加热电压8.5V;此后,加热电压以0.3V/s的上升速率增大,但不能超过LSU4.9规定的最大初始加热电压上升速率。这样可以在不超出UEGO传感器所承受的最大热应力的前提下,以最快的加热方式进行加热,缩短了冷启动时间。当氧浓差电池内阻小于400Ω时,切换到PI控制方式来提高稳态控制精度。
2.2.2 PI控制
在工作温度附近,采用PI控制,具体表达式为:
(2)
KI1=KP1TS1TI1-1
式中KP1——比例系数;
TI1——积分时间;
TS1——温度控制周期,此处取值10ms;
u0——温度偏差为零时的控制量。
UEGO传感器的温度设定值为传感器在780℃时对应的氧浓差电池内阻(即300Ω),偏差e1(k)等于氧浓差电池内阻测量值减去温度设定值。
3 泵电流控制
3.1 泵电流对象建模
泵电流控制是根据反馈的氧浓差电势大小,驱动泵电池上的泵电流使氧浓差电势维持在450mV,稳定后通过检测泵电流计算发动机空燃比的大小。将LSU4.9的温度控制在780℃,在氧浓差电势为450mV附近通过阶跃改变泵电池两端的泵电压,根据阶跃变化的泵电压和氧浓差电势响应数据,采用基于OE模型的预报误差方法进行泵电流模型辨识。为了获取不同工况时的泵电流数学模型,在混合气配气实验平台上通过配比不同λ值的混合气体,重复进行泵电流开环动态实验。在λ值等于2.040、1.400、1.010、0.901和0.780的混合气体中建立的泵电流数学模型分别如下:

(3)

(4)

(5)

(6)

(7)
比较上述5组在不同工况下建立的泵电流FOLPD模型可知,λ值从2.040~0.780为稀燃工况到富燃工况变化过程,FOLPD模型的开环增益K略微减小,惯性时间常数T增大趋势比较明显。泵电流对象建模结果表明,在不同λ值工况下的泵电流模型参数存在不确定性。由于UEGO传感器安装在汽车排气管上,处于强振动和复杂电磁干扰环境当中,泵电流的控制易受噪声干扰的影响。所以,泵电流控制的目标是在保证鲁棒性和抗干扰的前提下,提高泵电流控制的稳态和动态性能。
3.2 泵电流控制方法
由于泵电流模型参数具有不确定性且传感器工作环境的干扰较强,笔者采用基于H∞回路成形的鲁棒PID参数整定方法[7]。通过对泵电流对象模型进行回路成形可以增强系统的抗干扰能力,同时还可以保证系统具有较好的响应速度,回路成形后通过设计H∞控制器可以抑制泵电流模型参数摄动对系统的影响。基于H∞回路成形所设计的控制器可以转化为常见的控制器结构:
(8)
式(8)为不完全微分的PID控制器,在实际UEGO控制器上实现起来比较方便。
针对具有FOLPD模型结构的典型的工业被控对象,基于H∞回路成形的鲁棒PID控制器的控制参数分别为[8]:
(9)

(10)

(11)

(12)
为了保证泵电流控制的鲁棒性,将参数α限制在小于6.19的鲁棒范围内,通过最优PID参数整定方法进行参数寻优,从而提高泵电流控制的动态性能。选择以时间乘绝对误差的积分(ITAE)准则作为目标函数,利用逐次二次规划(SQP)寻优算法在[0 6.19]鲁棒范围内对参数α进行寻优。选择λ=1.4时所建立的泵电流模型,参数α寻优结果为0.136,对应的鲁棒性能指标大于0.2,表明控制器的鲁棒性较好。将α=0.136和泵电流模型参数代入式(9)~(12),可以得到不完全微分的PID参数分别为:KP2=1.52、TI2=0.16、TD2=0.0048、Tf=0.006。在编程实现时,需要将模拟不完全微分PID控制器数字化,即:
u2(k)=αu2(k-1)+(1-α)u3(k)
(13)

4 实验与仿真
4.1 温度控制实验
温度控制实验时,将LSU4.9悬空放置在空气环境中,室温10℃左右。由内模法整定的温度控制PI参数[9]分别为:KP1=0.0064,TI1=9.72。实际温度控制效果如图2所示,温度控制冷启动时间小于30s,氧浓差电池内阻稳态控制误差在±1Ω以内,表明温度控制冷启动时间较短,稳态控制精度高,满足UEGO传感器温度控制的实际要求。

图2 温度控制效果
4.2 泵电流控制仿真
选择λ值为1.4时建立的泵电流数学模型,基于Matlab进行泵电流控制方法仿真。首先,将传统PID参数整定方法Ziegler-Nichols(Z-N)法、Cohen-Coon(C-C)法与笔者提出的参数整定方法进行比较,结果如图3所示,笔者提出的PID参数整定方法较传统方法具有调节时间短、超调量小的优点;然后,在泵电流控制稳态时,加入正负阶跃干扰后的结果如图4所示,可以看出传统PID参数整定方法阶跃干扰响应过程振荡较大,而笔者所提方法的阶跃干扰响应过程快速且平滑。

图3 泵电流控制仿真对比
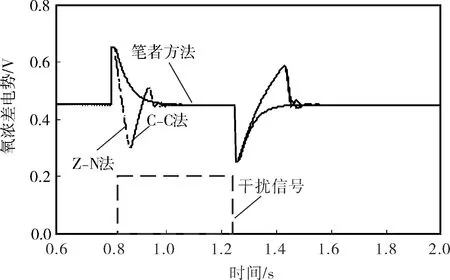
图4 稳态阶跃干扰仿真对比
4.3 泵电流控制实验
在空气环境中,UEGO传感器保持在780℃,基于H∞回路成形的鲁棒PID参数整定方法的泵电流控制效果如图5所示。可以看出,泵电流控制调节时间小于350ms,调节时间较短;稳态误差小于0.1mV,稳态精度高。

图5 泵电流控制实验效果
5 结束语
笔者主要研究了UEGO传感器的温度和泵电流控制方法。通过开环动态实验,采用基于OE模型预报误差的系统辨识方法建立了温度和泵电流对象的数学模型。采用冷启动控制和PI控制相结合的温度控制方法,缩短了UEGO传感器冷启动时间并提高了稳态控制精度。研究了基于H∞回路成形的鲁棒PID参数整定方法,以ITAE作为目标函数,在H∞控制鲁棒范围内进行参数寻优,提高了泵电流控制的鲁棒性和动态性能。仿真实验结果表明:温度控制稳态精度高,室温环境下冷启动时间小于30s;泵电流控制具有调节时间较短、稳态精度高的优点。
[1] Poggio L,Secco M,Ceccarini D,et al.Control Method for an Oxygen Linear Sensor[P].US:Patent 6223735B1,2001-05-01.
[2] Bolz S,Lugert G.A Novel Interface for Linear Oxygen Sensors[C].Automotive & Transportation Technology Congress & Exhibition Proceedings.Barcelona:SAE,2001:373~380.
[3] 刘瑞祥,高希彦,杨德胜.宽范围氧传感器控制器设计及在柴油机EGR系统中的应用[J].仪表技术与传感器,2004,(2):7~8.
[4] 卢继飞.发动机空燃比测量仪的研究[D].长春:吉林大学,2014.
[5] 张媛媛,徐科军,黄云志,等.宽域废气氧传感器控制器的研究与实验[J].电子测量与仪器学报,2010,24(11):1060~1066.
[6] 陈佳臻.宽带废气氧传感器控制器研制[D].合肥:合肥工业大学,2010.
[7] 刘国华.鲁棒PID控制器的研究[D].上海:东华大学,2006.
[8] 杨智,朱海锋,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005,32(5):1~7.
[9] 郑泳凌,马龙华,钱积新.鲁棒PID控制器参数整定方法[J].化工自动化及仪表,2001,28(5):14~17.
StudyonControlMethodforUniversalExhaustGasOxygenSensors
MIN Bing, LIU Jie, HUANG Yun-zhi
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology)
The universal exhaust gas oxygen (UEGO) sensor widely used in air-fuel ratio control system of the automobile engines has strict request for working temperature and has air/fuel ratio measured by controlling the pump current. In this paper, the control methods for both working temperature and pump current were discussed, in which, having cool start control and PI control combined to shorten sensor’s cool start time and to improve temperature control precision. Considering uncertainty of the pump’s current model parameter, a robust PID parameter tuning method based onH∞loop shaping was studied. The simulation experiment shows that, the universal exhaust gas oxygen sensor has shorter start-up time and higher temperature control precision; and the setting time of pump current control is short together with a high static accuracy.
UEGO sensor, temperature uontrol,pump current,PID, cool start
TH814
A
1000-3932(2017)02-0156-05
2016-05-17,
2016-11-25)
闵兵(1990-),硕士研究生,从事DSP技术与应用的研究。
联系人黄云志(1976-),教授,从事传感器技术、数字信号处理等领域的研究,hqyz@hfut.edu.cn。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:22:00
大电机技术(2022年3期)2022-08-06 07:48:24
重庆大学学报(2022年6期)2022-06-23 07:32:50
核科学与工程(2021年4期)2022-01-12 06:30:04
客联(2021年2期)2021-09-10 07:22:44
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
制造技术与机床(2017年3期)2017-06-23 08:11:38
电子制作(2016年21期)2016-05-17 03:53:01
军事体育学报(2014年4期)2014-02-27 16:00:47
