
基于STM32的无人机地面监控系统①
2017-11-01 11:27:43关学忠赵丽丽孙占文
化工自动化及仪表 2017年3期
关学忠 赵丽丽 崔 凡 卞 强 孙占文
(东北石油大学电气信息工程学院)
基于STM32的无人机地面监控系统①
关学忠 赵丽丽 崔 凡 卞 强 孙占文
(东北石油大学电气信息工程学院)
在VS平台上设计了一个基于STM32控制器的无人机地面监控系统,给出系统软硬件部分的选型和设计。经过实际联调,系统运行良好,实现了预期目标。
地面监控系统 四旋翼无人机 STM32 Mission Planner界面
随着航空和微机电技术的快速发展,微小型无人机已成为无人机范畴的重点研究课题。微小型无人机具有体积小、质量轻、布局简单、携带便利及维护方便等优点,在军事、民用等领域中得到了广泛应用[1]。笔者以四旋翼无人机(小型飞行器)为研究对象,应用无线链路装备,在VS软件上设计了一个无人机地面监控系统,实现无人机飞行状态数据实时采集显示、控制指令发送、飞行轨迹绘制、目标定位及无人机3D视景等功能。
1 系统总体结构
无人机地面监控系统(图1)硬件由PC机、飞行器、遥感器、无线数据通信设备及航拍摄像头等组成;软件由PC机上的地面监控系统和FlightGear视景显示部分组成[2]。
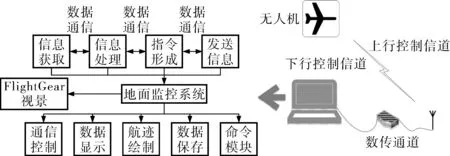
图1 无人机地面监控系统结构示意图
2 系统硬件部分
2.1 四旋翼无人机
四旋翼无人机(图2)由4个电机驱动的螺旋桨构成,固联在十字叉构造上,以4个旋翼为动力,可以垂直下降,不载工作人员。

图2 四旋翼无人机构造模拟图
四旋翼无人机控制板的硬件布局如图3所示。控制器采用具有ARM Cortex-M3处理器的STM32单片机,主要负责控制数据采集模块、通信模块、定时器模块和电机驱动模块。数据采集模块用于收集传感器数据,根据相应的传感器接口采集数据;通信模块用于控制器之间的通信和无人机与地面监控系统之间的通信;定时器模块用于捕获PPM信号、生成PWM信号和定时,生成的PWM信号发送给电机驱动模块(无极电刷),调节PWM波来改变电机转速[2]。
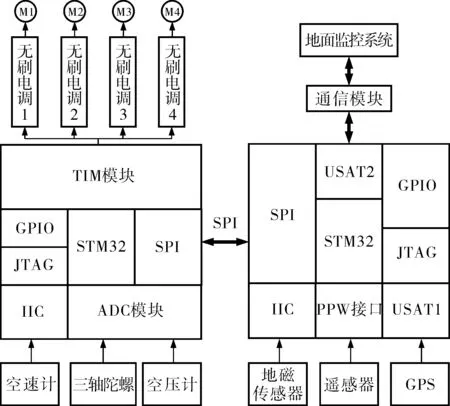
图3 四旋翼无人机控制板的硬件布局
四旋翼无人机设有两片STM32控制器(上下分布),分别进行不同的指令任务。上层控制器用于与地面监控系统的通信、采集遥控器的PPM信号并解码、获取传感器数据、与下层控制器的SPI通信;下层控制器用于控制电机转速、获取传感器数据、与上层控制器的SPI通信。
2.2 无线通信设备
无人机地面监控系统与四旋翼无人机之间采取无线串口通信方式,无线通信设备选择遵循ZigBee协议的XBee-Pro模块。该模块符合无线传感网络低资源、低功耗的要求,便于应用。
2.3 遥控设备
遥控设备选择天地飞遥控器,配有FRP06-P接收机,具有失控保障、抗干扰性强及稳定性高等优点。该遥控设备能够容易地寻找到PPM信号线,然后通过主控制器的一个定时器,就可以对PPM信号进行解码,从而完成对四旋翼无人机的控制。
3 系统软件部分
3.1 地面站界面
地面站界面采用VS平台编译源代码,打开Mission Planner界面(图4),首先调试PID参数和路径规划,然后对GPS模块和无线通信设备进行编译,就可实现对四旋翼无人机的定位和飞行姿态的掌握。
Mission Planner界面的功能主要包括以下3个部分:
a. 飞行状态数据的显示。机载控制系统通过传感器获取飞行姿态后,数据经由数据链路发送给地面监控系统,地面监控系统由仪表和文本框显示接收到的数据信息。

图4 Mission Planner界面
b. 控制命令的发送。地面监控系统通过数据链路把设置的控制指令发送给无人机,无人机收到指令后,通过MPU处理,实现对飞行器的操纵。
c. 航迹绘制和目标定位。电子地图实时显示无人机的航迹,并确定相应的目标定位和航点的设置与修正。
3.2 FlightGear视景显示
无人机地面监控系统的FlightGear视景显示能够根据实际的无人机姿态,仿真3D视景飞行。工作人员在遥控过程中不需要一直注视无人机,只需根据3D视景效果,就可以准确快速地确定无人机飞行姿态,从而给出遥控指令。
4 结束语
笔者基于STM32控制器,以四旋翼无人机为被控对象,在VS平台上设计了一个无人机地面监控系统。该系统的Mission Planner界面,实现了无人机飞行轨迹的实时记录;通过PID参数调整,实现了对四旋翼无人机飞行姿态的控制;绘制飞行轨迹,进行路径规划,实现了无人机的自主飞行。试验结果证明,该无人机地面监控系统可靠性高,达到了地面监控要求和预期目标。
[1] 于歌,刘刚,房建成.小型无人机地面监控系统软件设计与实现[J].机械与电子,2007,(7):24~26.
[2] 沈才云.四旋翼无人机地面监控系统的研究与设计[D].南京:东南大学,2013.
GroundMonitoringSystemforQuadrotorUnmannedAerialVehiclesBasedonSTM32Controller
GUAN Xue-zhong, ZHAO Li-li, CUI Fan, BIAN Qiang, SUN Zhan-wen
(CollegeofElectricalEngineeringandInformation,NortheastPetroleumUniversity)
On VS platform, a STM controller-based ground monitoring system for UAV (quadrotor unmanned aerial vehicle) was designed, including the system’s hardware design and its selection. Through joint debugging, the system runs well and achieves the goal as expected.
ground monitoring system, quadrotor UAV, STM32, Mission Planner interface
关学忠(1962-),教授,从事神经网络控制和故障诊断技术研究,gxzdqpi@163.com。
TH862
A
1000-3932(2017)03-0277-03
2016-09-02)
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
电子测试(2018年4期)2018-05-09 07:28:19
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
舰船科学技术(2015年8期)2015-02-27 15:38:41
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
