
干扰存在时被动声呐工作背景建模与分析
2017-10-26 02:47:13谭君红周胜增
声学技术 2017年2期
谭君红,周胜增
干扰存在时被动声呐工作背景建模与分析
谭君红,周胜增
(上海船舶电子设备研究所,上海201108)
在实际应用中,声呐的工作背景除了各向同性背景噪声外,通常还会存在干扰。干扰存在时经典的被动声呐方程存在一定的局限性。在经典被动声呐方程的基础上,讨论了干扰对被动声呐工作背景的影响。提出了一种更加实用的工作背景模型,并详细分析了波束域的工作背景模型,应用此背景模型对经典被动声呐方程进行了修正,修正后的方程可用于干扰存在时被动声呐的性能预报。最后通过不同干噪比条件下的仿真验证了波束域工作背景模型的正确性。提出的工作背景模型可为被动声呐设备在干扰存在条件下的性能预报提供参考。
被动声呐;干扰;工作背景;建模
0 引言
经典的被动声呐方程是以各向同性背景噪声为基础的。在实际使用中,声呐的工作环境除了各向同性背景噪声外,通常还会存在干扰。以拖曳式被动声呐为例,海洋环境噪声和拖曳流噪声属于各向同性背景噪声,而本舰或者其他非关注目标就是干扰[1-3]。干扰存在时,被动声呐的工作背景就不仅仅是各向同性的背景噪声,使用经典的被动声呐方程来分析干扰的影响或者对被动声呐进行性能预报都会存在一定的局限性。
本文以经典的被动声呐方程为基础,对干扰存在时被动声呐工作背景进行建模与分析,并通过不同干噪比条件下的仿真对模型进行验证,可对被动声呐在干扰存在的条件下进行性能预报。
1 被动声呐方程
由文献[4]可知,被动声呐方程为

式中,是辐射噪声源的声源级,是单程传播损失,是背景噪声级,是接收指向性指数,是接收检测阈,各参数均以分贝(dB)为单位。
优质因素是与作用距离有关的较为科学的衡量标准。被动声呐的优质因素定义为[5]

值是被动声呐允许的最大单程传播损失。在其余各参数都已知的条件下,可计算出值,当考虑到介质的传播特性[6-7]后,就能由传播损失得到设备的最大作用距离,从而对声呐设备进行作用距离预报[8-10]。
上述方程的前提是被动声呐设备工作在各向同性背景噪声的环境下。实际使用中,被动声呐设备的工作环境比较复杂,除了各向同性背景噪声外,还会存在本舰干扰、多目标干扰等,这些干扰的存在将提高干扰方位附近的声呐工作背景,此时声呐工作背景就与干扰自身大小、干扰与目标的方位差、接收阵的指向性图密切相关。因此需要对干扰存在时被动声呐的工作背景进行建模来分析讨论。
2 被动声呐工作背景建模与分析
由式(1)可知,不考虑干扰的情况下,被动声呐的工作环境为各向同性背景噪声,其阵元域背景噪声级为,波束域背景噪声级为-。
综上所述,干扰存在条件下被动声呐的工作背景模型如下:

波束域工作背景直接影响被动声呐的工作性能,下面对模型中的波束域工作背景进行讨论分析[11]:


说明被动声呐的工作背景仍为背景噪声,干扰没有抬高被动声呐的工作背景。




对波束域工作背景的建模可对干扰存在时的被动声呐进行性能预报。根据干扰存在时被动声呐的工作背景模型,可将被动声呐方程式(1)修正为

相应地,优质因素由式(2)修正为

3 拖线阵被动声呐工作背景仿真

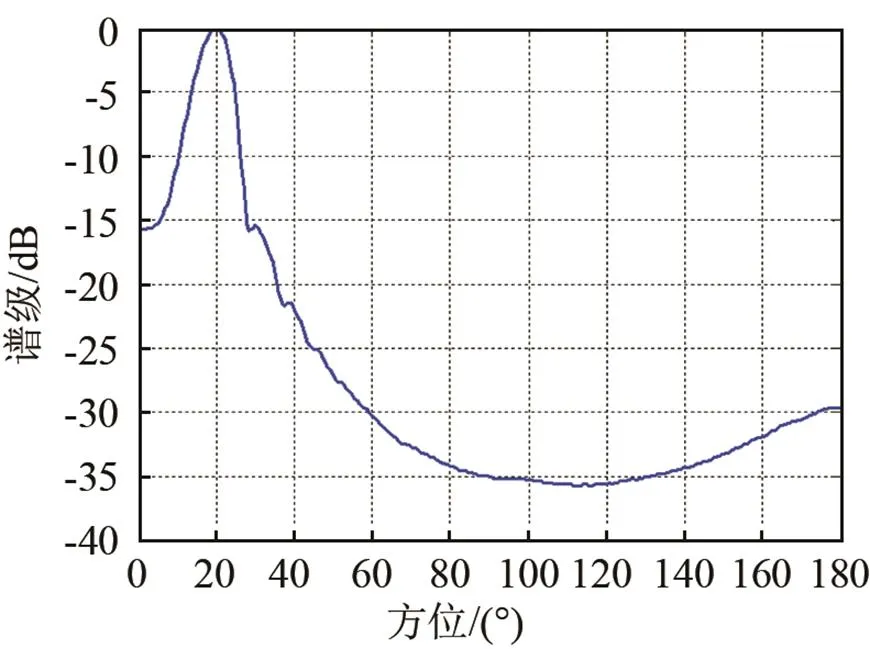
图1 干扰存在时被动声呐的背景分布图

根据第2节的分析:
(3) 当干扰级满足式(8)即82 dB<<94 dB时,100°波束域工作背景级应略高于波束域背景噪声级53 dB,此时干噪比介于12 dB与24 dB之间。
仿真干噪比为30、24、18、12、0 dB以及只有背景噪声时的方位谱级如图2所示。
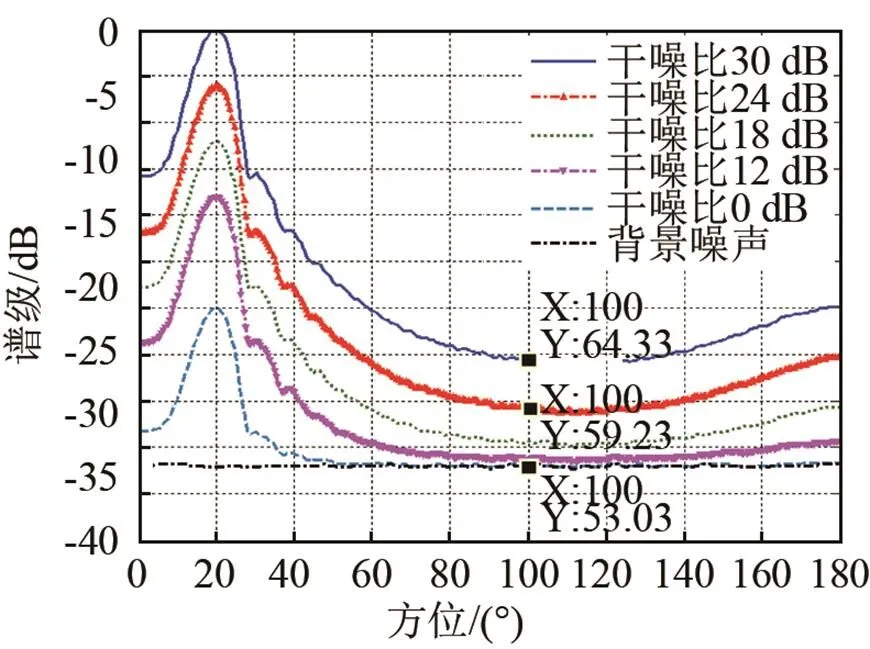
图2 不同仿真条件下的方位谱

4 结论
本文在经典的被动声呐方程基础上,考虑声呐实际应用时的工作环境,讨论了干扰存在时对被动声呐工作背景的影响,对干扰存在时被动声呐的工作背景进行了建模与分析。最后通过不同干噪比条件下的仿真验证了波束域工作背景模型的正确性。本文提出的工作背景模型可为干扰存在时被动声呐的性能预报提供重要参考。
[1] 刘清宇, 李磊, 蔡惠智. 一种被动拖曳声呐阵列信号模拟器设计[J]. 声学技术, 2009, 28(4): 463-466.LIU Qingyu, LI Lei, CAI Huizhi. The array simulator design of passive towed sonar[J]. Technical Acoustics, 2009, 28(4): 463-466.
[2] 李启虎, 李淑秋, 孙长瑜, 等. 主被动拖线阵声呐中拖曳平台噪声和拖鱼噪声在浅海使用时的干扰特性[J]. 声学学报, 2007, 32(1): 1-4.LI Qihu, LI Shuqiu, SUN Changyu, et al. The interference characterstics of platform and towed body noise in shallow water for active /passive towed array sonar[J]. Acta Acustica, 2007, 32(1): 1-4.
[3] 余华兵, 孙长瑜, 李启虎.探潜先锋-拖曳线列阵声呐[J]. 物理, 2006, 35(5): 420-423.YU Huabing, SUN Changyu, LI Qihu. Towed line array sonar spearheads submarine detection[J]. Physics, 2006, 35(5): 420-423.
[4] 刘伯胜, 雷家煜.水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2006: 6-11.LIU Bosheng, LEI Jiayu. Principle of underwater acoustics[M]. Harbin: Press of Harbin Engineering University, 2006: 6-11.
[5] 田坦, 刘国枝, 孙大军. 声呐技术[M]. 哈尔滨: 哈尔滨工程大学出版社, 2000: 17.TIAN tan, LIU Guozhi, SUN Dajun. Sonar technology[M]. Harbin: Press of Harbin Engineering University, 2000: 17.
[6] 赵淑坤, 于金花, 常哲, 等. 声传播损失试验分析与仿真[J]. 电子设计工程, 2014, 22(12): 72-74.ZHAO Shukun, YU Jinhua, CHANG Zhe, et al. Sound transmission loss experiment analysis and simulation[J]. Electronic Design Engineering, 2014, 22(12): 72-74.
[7] 黄海, 笪良龙, 张林. 基于蒙特卡罗方法的海洋环境不确定性仿真[J]. 计算机仿真, 2007, 24(9): 308-311.HUANG Hai, DA Lianglong, ZHANG Lin. Simulation of ocean environmental uncertainty based on Monte Carlo algorithm[J]. Computer Simulation, 2007, 24(9): 308-311.
[8] 季蓓, 程健庆, 曹志敏. 被动声呐作用距离预报的仿真研究[J]. 计算机仿真, 2007, 24(3): 31-34. JI Bei, CHENG Jianqing, CAO Zhimin. Simulation of detection range forecast for passive sonar[J]. Computer Simulation, 2007, 24(3): 31-34
[9] 张振华, 笪良龙, 谢骏. 被动声呐作用距离主影响因素研究[J]. 科技信息, 2010(23): 23-24. ZHANG Zhenhua, DA Lianglong, XIE Jun. Research on main influence factors of passive soanr detection range[J]. Science & Technology Information, 2010(23): 23-24.
[10] 李凡, 郭圣明, 王鲁军, 等. 一种新的声呐作用距离指标评估方法[J]. 声学技术, 2009, 28(3): 235-239. LI Fan, GUO Shengming, WANG Lujun, et al. A new approach to prediction of sonar detection range index[J]. Technical Acoustics, 2009, 28(3): 235-239.
[11] WaiteA D.实用声呐工程[M]. 王得石, 译. 北京: 北京工业出版社, 2004: 89. WaiteA D. Sonar for practising engineers[M]. tanslated by WANG Deshi. Beijing: Publishing House of Electronics Industry, 2004: 89.
Modeling and analysis of passive sonar working background under directional interference
TANJun-hong, ZHOU Sheng-zeng
(Shanghai Marine Electronic Equipment Research Institute, Shanghai 201108, China)
Passive sonar equation can be used to forecast sonar range. The working background is usually supposed to be isotropic noise. However, directional interference often exists in real application, where the application of classic passive sonar equation is limited. Based on the classic passive sonar equation, the influence of directional interference on the passive sonar working background is discussed, and a more useful working background model for passive sonar under directional interference is presented with the detailed analysis of the working background model in beam domain. The passive sonar equation is modified according to this model, and then it can be used to forecast sonar range under directional interference. Finally, the correctness of the working background model in beam domain is validated by simulation in different interference to noise ratios. The presented model can provide an important reference for acoustic compatible analysis and performance prediction of passive sonar under directional interference.
passive sonar; interference; background; modeling
TB556
A
1000-3630(2017)-02-0192-03
10.16300/j.cnki.1000-3630.2017.02.017
2016-03-02;
2016-06-02
谭君红(1987-), 女, 山东青岛人, 研究生, 研究方向为水声信号处理。
谭君红, E-mail: tanjunhong621@163.com
猜你喜欢
通信电源技术(2024年2期)2024-04-07 14:35:26
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
天津外国语大学学报(2021年1期)2021-03-29 03:07:20
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
疯狂英语·新策略(2019年9期)2019-10-17 01:51:34
趣味(语文)(2019年5期)2019-09-02 01:52:44
地震研究(2017年3期)2017-11-06 23:38:05
应用海洋学学报(2015年1期)2015-11-22 07:19:32
声学技术(2014年1期)2014-06-21 06:56:32
