
水下无人航行器声学系统实收实发声隔离度分析研究
2017-10-25 12:44赵龙龙
声学技术 2017年3期
赵龙龙
水下无人航行器声学系统实收实发声隔离度分析研究
赵龙龙
(广东湛江91388部队,广东湛江524022)
对某水下无人航行器声学系统在特定间距及频段条件下实收实发声隔离度进行了分析研究。在分析某水下无人航行器载体基本结构特征的基础上,通过ANSYS有限元建模仿真软件,对航行器声学系统实现实收实发的指向性和隔离度进行了仿真计算,并在消声水池对航行器声学系统实收实发隔离度进行了实验测试。研究结果表明,收发间距为3 m时具有一定的收发隔离度,若对隔离度有更高要求,则需采取调整收发换能器间距或对接收水听器加装吸声障板等技术措施,可为水下无人航行器声学系统设计及实现实收实发提供技术支持。
水下无人航行器;水声;实收实发;声隔离度
0 引言
随着技术的进步与发展,水下无人航行器(Underwater Unmanned Vehicle,UUV)自身具备的能力越来越强,其应用领域也越来越广泛。作为一个成熟的水下机动搭载平台,水下无人航行器可以搭载不同设备,完成所赋予的各种水下使命任务。如美国海军已装备了数百条执行各种任务的水下无人航行器,作为其水面舰艇、潜艇的“助手”实施水下作战[1]。
在水下活动式声学模拟装置的设计使用中,水下无人航行器可搭载不同功能的水声换能器,用于模拟水下目标的声学特性。由于水下环境的复杂性和航行器自噪声的影响,在载体上通过换能器实现水声信号实收实发并达到较好的声隔离度与指向性指标,还需要开展深入细致的研究。所谓实收实发技术[2-3],即在声学系统发射回波信号的同时接收主动探测信号,另外某些声学系统在此基础上同时一直发射模拟噪声。实收实发技术的优点是系统在发射应答信号时,不关闭接收机,从而实现在正常发射回波信号的同时测量来袭目标的信号频率。该技术一般应用于“智能型”声诱饵的工程实现。声隔离度定义为声学系统中接收换能器接收到信号的声源级(dB)与系统发射信号声源级(dB)的差值,用表示,其表达式为:=1-2,其中1为声学系统接收端换能器接收到的来袭目标主动信号声源级,2为声学系统发射的回波信号声源级。声隔离度主要受收发距离、发射及接收换能器的指向性、信号处理方法等因素影响。
本文在分析某水下无人航行器声学系统基本结构特征的基础上,通过ANSYS有限元建模仿真软件,对航行器声学系统实现实收实发的指向性和声隔离度进行了仿真计算,并在消声水池对航行器实收实发隔离度进行了等效模型实验研究,研究结果可为水下无人航行器声学系统设计及实现实收实发提供支持。
1 水下无人航行器收发结构
某水下无人航行器外形及收发换能器安装布置示意图如图1所示。

图1 水下无人航行器换能器布置示意图
为在水下无人航行器载体上实现对水声信号的实收实发,同时考虑尾部载体推进噪声的影响,在头部布置接收换能器,尾部布置发射换能器。在考虑航行器载体功能实现的基础上,两者之间的间距尽量增大,载体本体具备一定的声隔离性,但在载体上实现实收实发功能的声隔离效果能否达到相关要求,还需通过仿真及实验进行研究分析。
2 声隔离建模仿真
2.1 仿真软件
ANSYS有限元软件是目前比较流行的有限元分析软件之一,它能解决工程中诸多学科的形形色色的实际问题,功能非常全面,如结构力学、电磁场、流体力学、热学、耦合场(多种物理场之间的相互耦合)等问题[4]。与换能器设计的有关问题主要是结构分析、流体-结构耦合分析、压电耦合分析,有时候还需用到电磁场分析、热分析等功能。用ANSYS软件进行声学仿真的步骤如图2所示。
2.2 有限元模型
分析无人水下航行器收发换能器安装使用位置,简化分析对象,采用ANSYS仿真软件,在APDL (ANSYS Parametric Design Language)方式下进行二维对称建模[4-5],可建立如图3所示的声隔离仿真模型,图3(a)为二维图,图3(b)为网格化后的有限元分析模型。

图2 ANSYS软件进行声学仿真一般步骤
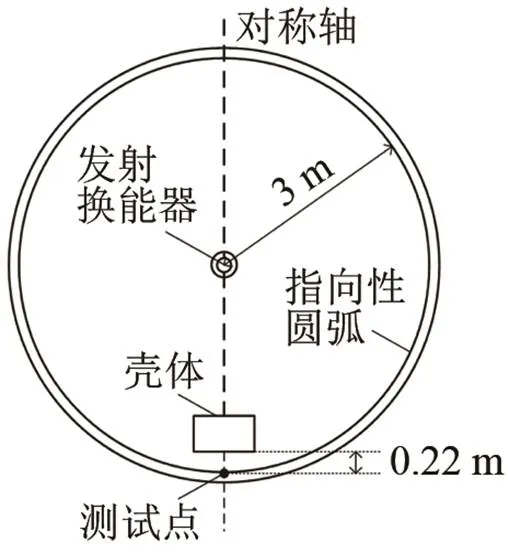
(a) 二维图 (b) 有限元模型
图3中,假定接收指向性圆弧与换能器的距离为3 m,壳体距测试点为0.22 m,以模拟水下无人航行器的收发换能器布置条件。
2.3 仿真数据
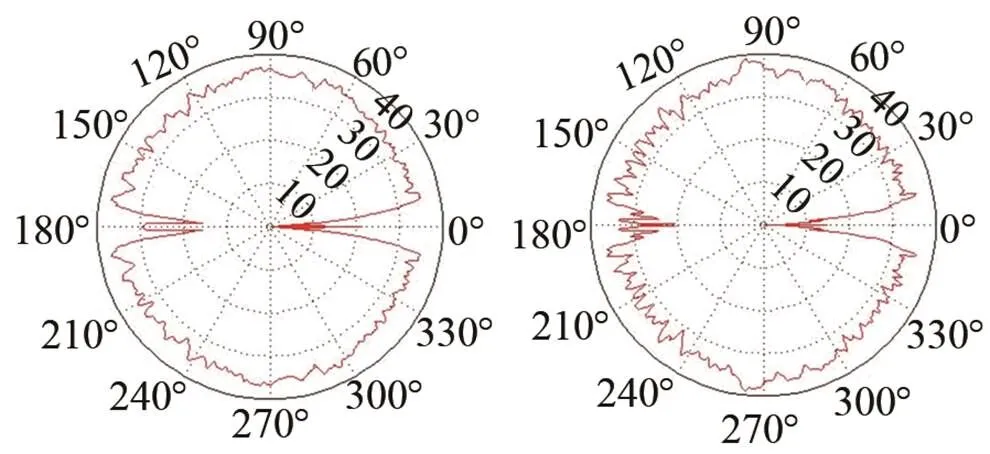
经ANSYS有限元仿真分析,假定信号频段为14~38 kHz,仿真分析声障板对接收指向性的影响如图4所示。
由图4可知,随着频率的升高,声障板对接收换能器的指向性影响增大。通过仿真结果可以看出,在14~38 kHz范围内,声学隔离度在17~24 dB左右。但仿真是在理想情况下,发射不受任何干扰,实际使用中发射换能器在航行器载体上,接收器在前方的透声罩内,受到透声罩内部结构的影响,指向性开角及起伏具有很大的不确定性。

(a)14 kHz (b)16 kHz
(c)18 kHz (d)22 kHz
(e)26 kHz (f)30 kHz
(g)34 kHz (h)38 kHz
图4 不同频点声障板对接收指向性的影响
Fig.4 The effects of acoustical baffle on reception directivity at different frequency spots
3 声隔离水池实验
3.1 实验布置
在进行仿真建模分析后,利用现有条件在水池开展相关实验验证[6-7],水池布置示意图如图5所示。
图5中消声水池尺寸为10 m(宽)×23 m(长)×8 m(深)。使用水池自动化测试系统、数据采集器、信号源、功率放大器、滤波器、发射换能器、标准水听器等构建的实验环境如图5所示。
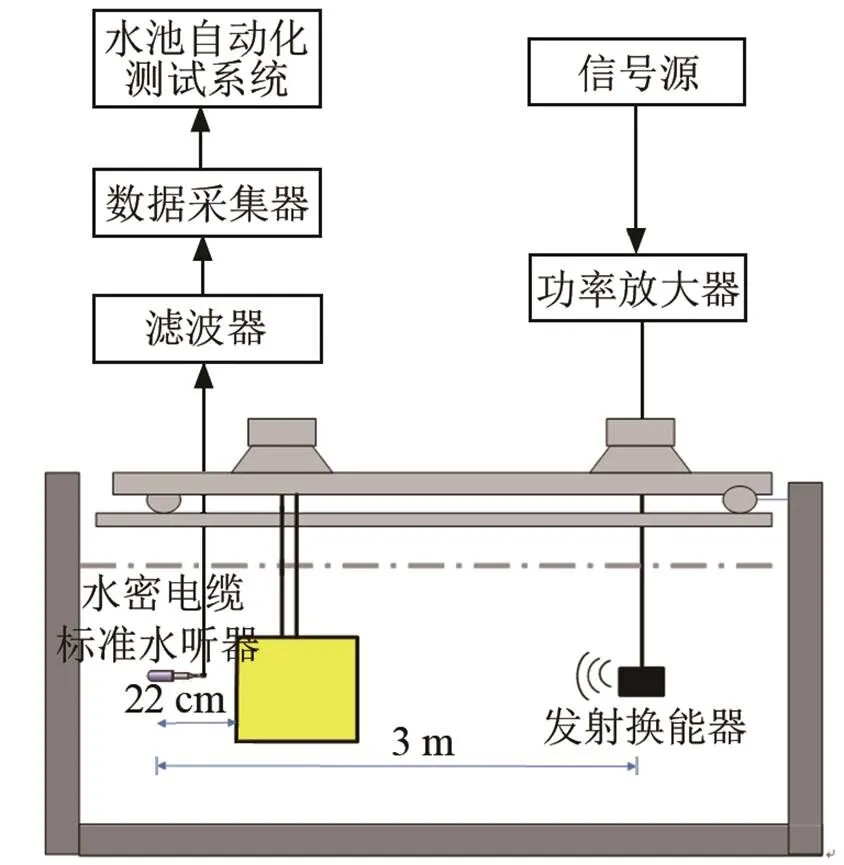
图5 声隔离水池实验布置示意图
3.2 实验数据
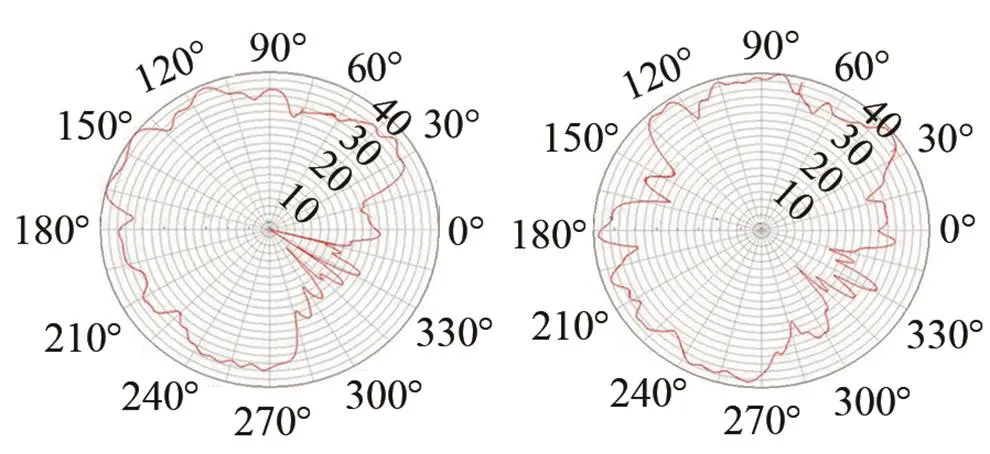
按图5所示的实验布置,将声障板通过夹具固定在水池旋转装置上,水听器安装布置与仿真条件相同,即其在距障板前端面中轴线0.22 m处,水听器及发射换能器布放在水池中相距3 m,水深为3 m,从而模拟在航行器载体上的换能器布置。信号源经功放和发射换能器发射频率范围为14~38 kHz的正弦连续信号,接收水听器围绕发射换能器以3 m半径旋转,接收信号并经滤波器滤波放大后送入水池自动化测试系统。对14~38 kHz宽频带换能器指向性进行测量,主要测量结果如图6所示。
图6中340°方向为声障板轴线头部方向,160°为障板轴线尾部朝向方向。
(a)14 kHz (b)16 kHz
(c)18 kHz (d)22 kHz

(e)26 kHz (f)30 kHz
(g)34 kHz (h)38 kHz
图6 接收水听器不同频率点的指向性
Fig.6 The directivities of receiving hydrophone at different frequency spots
3.3 数据分析
(1) 单独考虑接收水听器在障板影响下的指向性,在14~38 kHz带宽内,指向性随频率变化而变化。接收水听器既要保证在正横方向较宽开角,又要在14~38 kHz宽频带内与发射换能器具有高隔离度是较困难的。
(2) 由实验结果可知,发射换能器与水听器在14~38 kHz宽带内,声学隔离度为15~19 dB左右。若发射换能器指向性在14~38 kHz宽带内具有8~10 dB的指向性隔离度,那么系统隔离度大约在23~29 dB。
(3) 接收水听器指向性在反声障板影响下随频率变化,起伏较大,部分频率点起伏大于9 dB,会导致航行器载体模拟水下目标强度的误差较大。
4 仿真实验数据比对
4.1 数据比对图
对仿真及实验数据进行处理,形成的仿真及实验数据对比图如图7所示,其中红线为仿真数据,蓝线为实验数据。
4.2 数据比对分析
(1) 通过仿真与实验声隔离仿真数据显示,在14~38 kHz范围内,声学隔离度在17~24 dB左右。而在实际测试中,发射换能器与水听器在14~38 kHz宽带内,声学隔离度在15~19 dB左右。

(a)14 kHz (b)16 kHz
(c)18 kHz (d)22 kHz

(e)26 kHz (f)30 kHz
(g)34 kHz (h)38 kHz
图7 声隔离仿真及实验数据对比图
Fig.7 The collation map of acoustic isolation simulation and experimental data
(2) 仿真和试验中声障板对接收的影响趋势相似,但是实际中受到测试条件或其它因素影响,隔离度减弱而且指向性开角更小。单独考虑接收水听器在载体障板影响下的指向性,在14~38 kHz带宽内,接收水听器既要在航行器正横方向有较宽的开角,又要在14~38 kHz宽频带内与发射换能器具有较高的隔离度是比较困难的。
5 结论
水下无人航行器载体声信号实收实发实现了较好的声隔离度,对航行器功能的拓展和使用具有重要的作用和意义。结合某水下无人航行器载体收发换能器的布置参数,在特定间距及频段条件下,对航行器载体实收实发进行了ANSYS建模仿真及水池实验测试。需要指出的是,文中的实验和有限元模型直接结果均已包含3 m的距离传播损失影响。通过比对仿真实验数据,表明在该尺度下具有一定的收发隔离度,若对隔离度有更高要求,则需采取调整收发换能器间距或对接收水听器加装吸声障板等技术措施。
[1] 陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014, 1: 1-20. CHEN Qiang. Unmanned underwater vehicle[M]. Beijing: National Defence Industry Press, 2014, 1: 1-20.
[2] 吴培荣. 基于边收边发技术的声隔离度研究[J]. 声学技术, 2013, 32(4): 281-283.WU Peirong.Research on isolation degree of ‘receiving and sending’ technique[J]. Technical Acoustics, 2013, 32(4): 281-283.
[3] 周益明, 王建中, 张涛. 一种新型声隔离系统[J]. 声学技术, 2013, 32(6): 151-155. ZHOU Yiming, WANG Jianzhong, ZHANG Tao. A new type of sound isolation system[J]. Technical Acoustics, 2013, 32(6): 151-155.
[4] 龚曙光, 谢桂兰, 黄云清. ANSYS参数化编程与命令手册[M]. 北京: 机械工业出版社, 2009, 10: 1-4. GONG Shuguang, XIE Guilan, HUANG yunqing. ANSYS Operation command and parametric programming reference[M]. Beijing: China Machine Press, 2009, 10: 1-4.
[5] 莫喜平. 用ANSYS有限元软件模拟分析声学换能器[R]. 北京: 中国科学院声学研究所, 2004: 11-17. MO Xiping. Simulation analysis of acoustic transducer with ANSYS finite element software[R]. Beijing: Acoustics of Chinese Academy of Sciences, 2004: 11-17.
[6] 李留成, 贾同民, 王瑜, 等. 鱼雷制造技术[M]. 北京: 国防工业出版社, 2011, 7: 313-323. LI Liucheng, JIA Tongmin, WANG Yu, et al. Torpedo manufacture technique[M]. Beijing: National Defence Industry Press, 2011, 7: 313-323.
[7] 汪德昭, 尚尔昌. 水声学[M]. 2版. 北京: 科学出版社, 2013, 7: 560-561. WANG Dezhao, SHANG Erchang. Underwater Acoustics[M]. 2nd edition. Beijing: Science Press, 2013, 7: 560-561.
Analysis of underwater acoustic isolation effect for real-time receiving and sending of UUV acoustic system
ZHAO Long-long
(Unit913888, PLA, Zhanjiang 524022, Guangdong, China)
The acoustic isolation degree between real-time receiving and sending of an underwater unmanned vehicle is analyzed in the specific separation and frequency range. Based on analyzing the structure characteristics of an underwater unmanned vehicle, underwater acoustic isolation effect for real-time receiving and sending of Underwater Unmanned Vehicle (UUV) acoustic system is simulated by the software ANSYS, and the corresponding isolation testing experiment is carried out in anechoic tank. The results showthat the spacing of 3 meters provides a certain degree of acoustic isolation, if a higher degree of isolation is required, it will be necessary to adjust the distance between receiving and transmitting transducer, or add acoustical baffle for the receiving transducer,or take other technical measures.The results of the research can provide a technical support for the design and implementation of underwater unmanned vehicle acoustic system to achieve real-time receiving and sending.
underwater unmanned vehicle; underwater acoustic; real-time receive and send; acoustic isolation
TB565
A
1000-3630(2017)-03-0228-05
10.16300/j.cnki.1000-3630.2017.03.006
2016-10-24;
2016-12-12
赵龙龙(1976-), 男, 辽宁本溪人, 硕士, 高级工程师, 研究方向为水声工程。
赵龙龙, E-mail: zhao_ll20000@163.com
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
作文成功之路·小学版(2020年9期)2020-10-28
应用科技(2020年1期)2020-06-18
数字通信世界(2019年8期)2019-09-03
人大建设(2018年11期)2019-01-31
测控技术(2018年1期)2018-11-25
无线电工程(2018年11期)2018-02-13
新课程研究(2016年21期)2016-02-28
