
大容量隐极同步调相机惰走转速计算
2017-10-20 09:25,,
防爆电机 2017年5期
,,
(哈尔滨电机厂有限责任公司,黑龙江哈尔滨 150040)
大容量隐极同步调相机惰走转速计算
朱志佳,曹尚阳,张健
(哈尔滨电机厂有限责任公司,黑龙江哈尔滨 150040)
介绍了大容量隐极同步调相机惰走过程中的转子运动方程,给出转子转动惯量、机械阻力转矩的计算方法。以某200MW同步电机转子为研究对象,通过与试验数据对比,验证了计算方法的可行性。
调相机;惰走;转速计算
0 引言
同步调相机本质上是一种不对外输出机械转矩的同步电动机,它从电网吸收少量的有功功率,用于克服自身的损耗,同时通过调节励磁电流,控制向电网发出或吸收的无功功率,用于电力系统的无功功率平衡,调节系统电压。
由于调相机投资大,运行维护复杂,自上世纪70年代以来,随着电力电子技术的发展,调相机逐步被运行维护简单的SVC、SVG所替代。当前,随着远距离直流输电系统的建设,对系统动态无功补偿的需求越来越大,静止无功补偿装置受其工作原理限制,在系统电压大幅波动时,无法提供足够的动态无功补偿。而调相机在电网故障时,能通过强励向电网瞬时提供大量的无功功率,因此目前国内直流输电系统的换流站正在逐步加装大容量隐极同步调相机。
不同于常规发电站,调相机没有汽轮机为其提供机械输入转矩,仅通过从电网吸收有功维持自身转速,一旦出现全厂断电的突发故障,高速旋转的调相机转子由于失去输入电磁转矩来平衡自身所受的机械阻力转矩,转速必然逐步下降,进入惰走过程。油系统必须在失去常规能源供应的条件下,在调相机转子惰走过程中持续提供足够的冷却润滑油来为转轴提供滑动支撑,避免转轴损伤甚至损毁。
一般油系统在全厂失电的条件下,采用高位油箱或者直流油泵设计为调相机转子惰走过程提供润滑油,这就需要对调相机转子惰走过程的转速变化进行准确的计算。
1 转子运动方程
对于隐极同步调相机,在正常运行条件下,通过定子绕组从电网吸收有功功率克服自身的损耗,即转子受到的电磁转矩(Me)与机械阻力转矩(Mm)平衡,维持转子转速处于额定转速,见图1。

图1调相机转子转矩平衡图
对于失电工况,调相机转子失去电磁转矩(Me),仅受机械阻力转矩(Mm),转矩失去平衡,在此过程中,转子满足刚体定轴转动定律

(1)
式中,Mm—机械阻力矩,N/m;J—转子转动惯量,kg·m2;A—转子角加速度,rad/s2;ω—转子角速度,rad/s;t—时间,s。
由式(1)可知,惰走过程中,调相机转子的角加速度等于其机械阻力矩与转动惯量的比值。因此计算调相机惰走过程转速变化关键在于确定转子的转动惯量、机械阻力矩,然后求解微分方程。
2 转子转动惯量
图2为某隐极同步调相机转子的结构图。调相机转轴主要用途是产生励磁磁势,由转子绕组、转轴、护环、风扇等组成。 转轴中间部分比其他部分直径大、长度长的位置叫做转子本体,用于放置转子线圈;套在转子本体两端的转子护环用于保护端部线圈;转子风扇用于通风,冷却调相机;轴颈部分与轴承配合,用于对转轴进行滑动支撑。
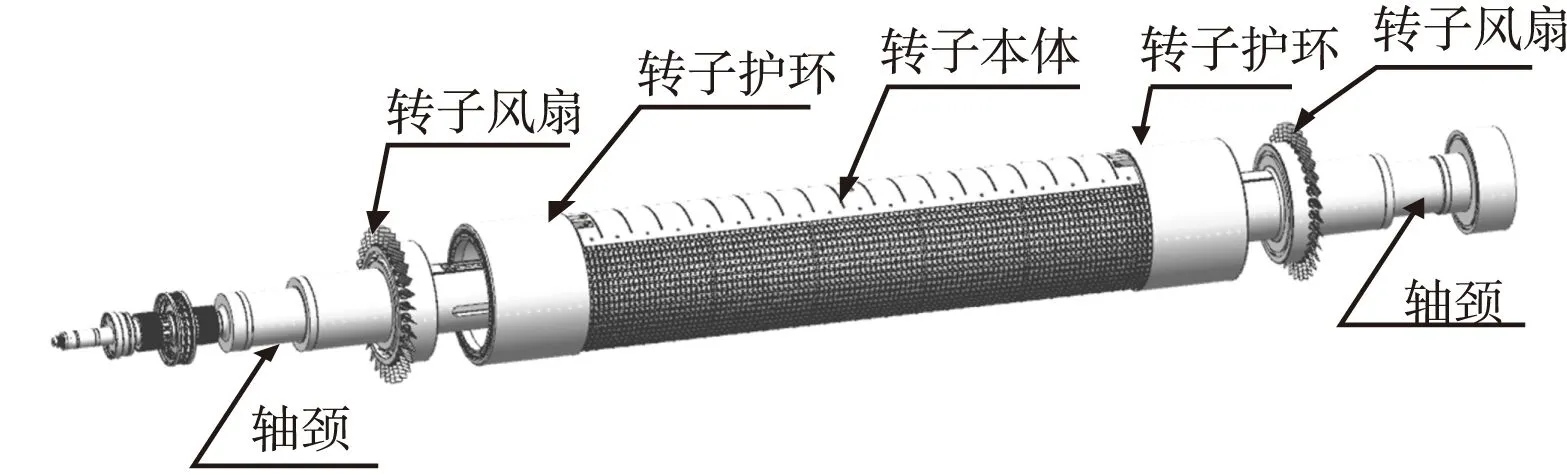
图2调相机转子结构图
为精确计算调相机转子的转动惯量,需要逐项、逐段计算转子每部分的转动惯量,而后求和。这里给出工程上计算调相机转子转动惯量的近似算法。

(2)
式中,ρ—转轴材料密度;R2—转轴半径,m;l2—转子本体长度,m;D2—转子本体直径,m;K—经验系数,一般取1~2。
3 转子机械转矩
调相机转子所受的机械转矩取决于其各部分产生的机械损耗。转子机械损耗主要由以下部分构成:转子本体摩擦损耗、转子护环摩擦损耗、转子风扇通风损耗、转子轴颈处的摩擦损耗,这些损耗在转子惰走过程中并非保持不变,而是随着转速的变化而变化,均可写成以转速为自变量的函数。转子本体摩擦损耗(采用空气冷却)

(3)
式中,D2—转子本体直径,m;l2—转子本体长度,m;ω—转子角速度,rad/s。
转子护环摩擦损耗(采用空气冷却)
(4)
式中,Dk—转子护环直径,m;lk—转子护环长度,m;ω—转子角速度,rad/s。
转子风扇通风损耗(采用空气冷却)
(5)
式中,Qfn—3000r/min时转子风扇的通风损耗,kW,由通风计算得到;ω—转子角速度,rad/s。
转子轴颈处摩擦损耗(ω>33.33π/s)
(6)
式中,Qmn1—3000r/min时转子轴颈处摩擦损耗,kW,由轴承静态性能计算得到;ω—转子角速度,rad/s。
转子轴颈处摩擦损耗(转速≤33.33π/s)
(7)
式中,Qmn2—1000r/min时转子轴颈处摩擦损耗,kW;ω—转子角速度,rad/s。
按式(3)~式(7)完成转子机械损耗计算后,即可得到调相机转子惰走过程所受的机械阻力矩为

(8)
4 转子惰走过程计算与试验校验
以上述的计算方法,对某200MW同步电机转子自转速为3150r/min开始的惰走过程进行计算,并与试验结果进行对比验证。该同步电机转子惰走过程计算输入数据见表1。
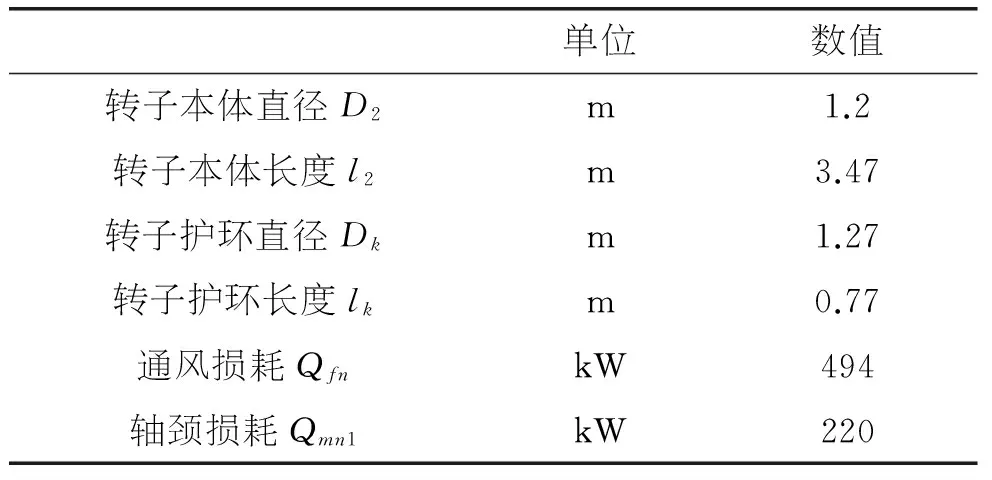
表1 某200MW同步电机惰走过程计算输入数据
按上述方法,计算得到转子的转动惯量为
J=6937(k g·m2)
(9)
当转子转速ω>33.33π/s,机械阻力转矩为
Mm(ω)=0.0329ω2+2.23ω
(10)
当转子转速ω≤33.33π/s,机械阻力转矩为
Mm(ω)=0.0329ω2+233
(11)
将式(9)~式(11)带入式(1)求解微分方程,即可得到转子惰走过程转速ω随时间变化的的表达式,它是一个分段函数。
当转子转速ω>33.33π/s,转速为
(12)
当转子转速ω≤33.33π/s,转速为
ω(t)=-84.19tan(0.0004t-1.282)
(13)
在该机组型式试验时,使用拖动机将转子转速拖动至3150r/min,而后断开拖动机电源,记录转子转速随时间变化的曲线。
将转子转速单位转换为r/min,时间单位转换为min,将惰走过程转子转速计算曲线与试验测量的曲线对比见图3。
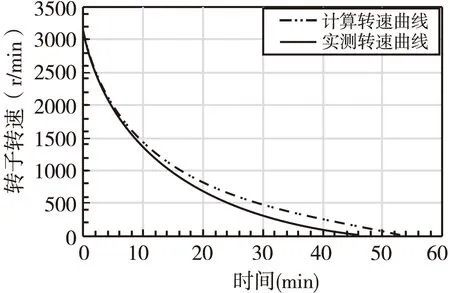
图3惰走过程转子转速计算曲线与实测曲线对比
由图3可知,当转子转速>1500r/min时,计算转速曲线与实测转速曲线吻合度很好;当转子转速<1500r/min后,计算转速曲线变化率较实测转速曲线偏小;总的惰走时间,计算值较试验值偏大约12%,满足工程计算要求。
5 结语
本文通过分析转子运动方程,得出了调相机转子转动惯量和机械阻力转矩的计算方法,通过实例的验证,取得了良好的验证结果,证实了该计算可行。
[1] 张自评.同步调相机运行方式的分析[J]. 华中电力,1993.
[2] 汪耕,李希明.大型汽轮发电机设计、制造与运行[M]. 上海:上海科学技术出版社,2000.
[3] 陈世坤.电机设计[M]. 北京:机械工业出版社,2000.
[4] 李岸然.600MW亚临界汽轮机停机惰走超时分析[J].广西电力,2011.
[5] 江建勋.汽轮机转子惰走时间异常原因分析[J].内蒙古电力技术,2017.
CalculationforIdleSpeedofLarge-CapacityCylindricalRotorSynchronousCondenser
ZhuZhijia,CaoShangyang,andZhangJian
(Harbin Electric Machinery Company Limited,Harbin 150040,China)
This paper introduces the rotor motion equation of large- capacity cylindrical rotor synchronous condenser in idle process, gives the calculation methods of rotor inertia movement and the mechanical drag torque. Taking a rotor of 200 MW synchronous machine as a research object, the feasibility of method is verified by comparing with test data.
Rotary condenser;idle operation;speed calculation
10.3969/J.ISSN.1008-7281.2017.05.05
TM303.5
A
1008-7281(2017)05-0016-003
朱志佳男1988年生;毕业于天津大学电气工程学院电气工程及其自动化专业,现从事汽轮发电机设计工作.
2016-11-18
猜你喜欢
上海大中型电机(2021年1期)2021-06-09
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
山东冶金(2019年2期)2019-05-11
制造业自动化(2017年2期)2017-03-20
电脑爱好者(2016年23期)2017-01-05
文学教育(2016年27期)2016-02-28
振动、测试与诊断(2014年4期)2014-03-01
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21
