Ka频段低轨卫星跟踪技术研究
2017-10-20 06:00徐崇彦张言锋孟祥国
无线电通信技术 2017年6期
徐崇彦,张言锋,孟祥国
(1.北京遥感信息研究所,北京 100192; 2.航天恒星科技有限公司,北京100086)
Ka频段低轨卫星跟踪技术研究
徐崇彦1,张言锋1,孟祥国2
(1.北京遥感信息研究所,北京 100192; 2.航天恒星科技有限公司,北京100086)
大口径天线在跟踪Ka频段低轨遥感卫星时,由于半功率波束宽度很窄,对天线跟踪提出了更高的要求。从提升天线跟踪精度角度出发,提出了通过采用变积分PID控制及计算机辅助跟踪的方法,有效减小天线伺服环路的动态滞后,提高天线跟踪精度;从优化Ka频段跟踪捕获流程角度,提出了低仰角捕获跟踪及高仰角捕获跟踪时的不同策略,提高大口径天线Ka频段窄波束捕获成功率。采用上述方法和策略,通过仿真及工程调优可以显著提升天线跟踪精度,实现天线高精度跟踪。
Ka频段;低轨卫星;变积分PID;跟踪精度;动态滞后
0 引言
目前,遥感卫星数据多采用X频段下传,随着卫星载荷分辨率的增加,星上数据量也急剧增长,对数传速率提出了更高的要求,然而,X频段的带宽有限,难以满足更高码速率下传的需要,考虑Ka频段高码率数传在高轨卫星中的成功应用,低轨卫星采用Ka频段数传将是解决数传码速率不足的有效方式[1-3]。低轨卫星采用Ka频段数传,为了满足接收链路余量要求,地面站需要采用大口径天线,而Ka频段大口径天线的半功率波束宽度很窄[4],同时低轨卫星相对地面站天线而言,运动速率快且变化剧烈,上述因素,都对遥感地面站天线跟踪低轨Ka频段卫星提出了更高的指标要求,需要对Ka频段跟踪精度要求进行分析,并采取措施满足天线跟踪精度要求。
1 Ka频段天线跟踪精度要求与主要指标分析
1.1 Ka频段天线跟踪精度要求
在实现Ka频段数据接收时,需要采用Ka频段自动跟踪方式,根据天线跟踪误差损耗LTr计算公式[5]:

(1)
可以得出,在偏离1/10半波束宽度时损失为0.12 dB,在偏离1/2半波束宽度时损失为3 dB,为了达到良好的数据接收效果,可将天线跟踪精度设计为1/10半波束宽度。结合目前天线技术能力,在Ka频段自动跟踪模式下,分配各项误差源主要贡献如表1所示。
表1 跟踪精度分配
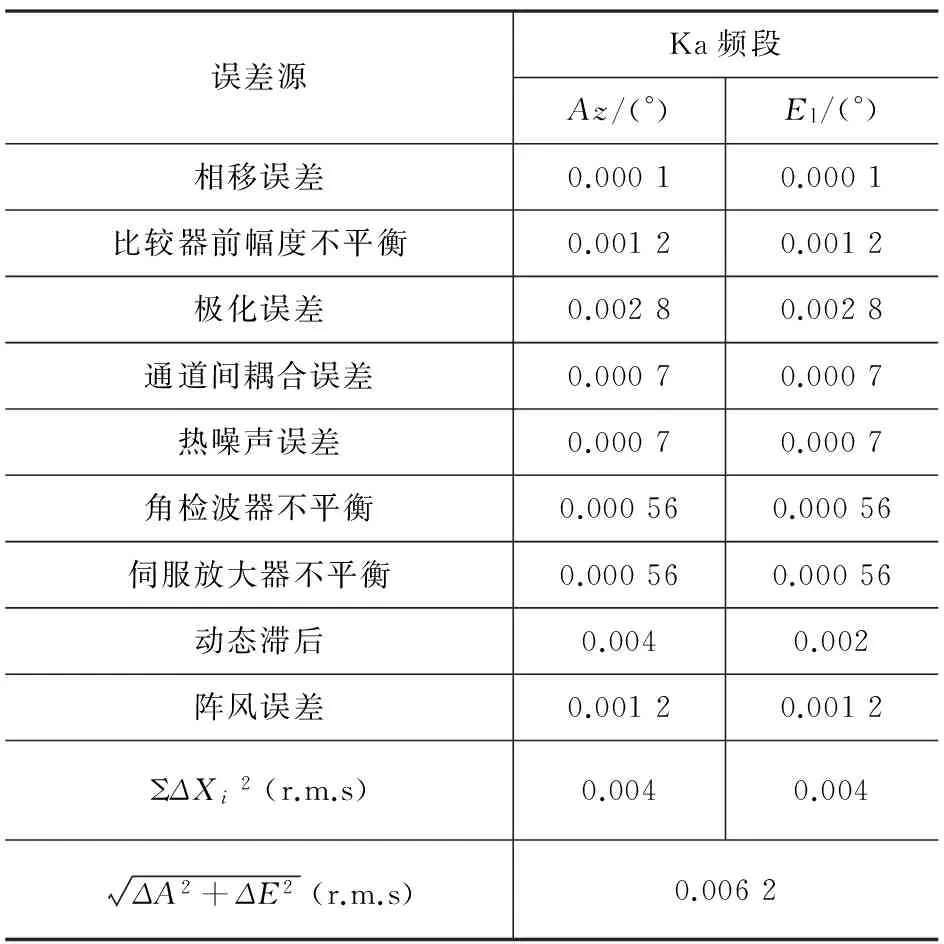
误差源Ka频段Az/(°)El/(°)相移误差0.00010.0001比较器前幅度不平衡0.00120.0012极化误差0.00280.0028通道间耦合误差0.00070.0007热噪声误差0.00070.0007角检波器不平衡0.000560.00056伺服放大器不平衡0.000560.00056动态滞后0.0040.002阵风误差0.00120.0012ΣΔXi2(r.m.s)0.0040.004ΔA2+ΔE2(r.m.s)0.0062
在表1的误差分配中,考虑了目前大口径Ka频段天线的技术水平,除动态滞后一项误差项外,其他误差项的分配值当前大口径Ka频段天线的技术水平即可完全满足。
1.2 动态滞后误差分析
影响大口径天线目标跟踪性能的重要因素是天线的动态滞后问题。对低轨过境卫星,目标的运动速度很快,特别是在过顶前后,目标运动对天线系统的加速度要求很高。而天线系统在设计时由于速度、加速度、跟踪方式等多方面的原因,存在一定的动态滞后(指向误差),特别是在过顶前后这个问题更为突出。上表中的10-3量级的动态滞后误差分配要求,对天线伺服系统提出了更高要求。
目标运动角加速度引起的动态滞后误差由下式计算[6]:

(2)

在其他因素不变的前提下,加速度常数越大,动态滞后越小,通常三轴座架天线的位置环开环增益(等效加速度误差系数)Ka可以达到6左右(位置环带宽1.2 Hz),计算伺服系统动态滞后为:

(3)
从上述计算可知,目标过顶前后动态滞后误差就足以使天线指向偏出主瓣范围,造成跟踪丢失,无法实现对目标的稳定跟踪。只有提高伺服系统等效加速度误差系数Ka值,才能保证Ka频段的稳定跟踪。取Ka为60,计算得ΔA为0.003 8°,可知天线跟踪系统的加速度常数必须优于60,并考虑一定余量才能满足方位和俯仰动态滞后误差分配要求。
1.3 S频段引导Ka频段跟踪分析
由于Ka频段半功率波束宽度太窄,如何成功捕获Ka频段信号转入Ka频段自跟踪仍需探讨。首先计算S频段自跟踪转入Ka频段自跟踪的成功概率如下:
在自引导时间T内,目标不超过给定空域的概率称为连续引导概率。假定:① 在引导时间T内目标相继离开主波束的概率近似服从“泊松分布”;② 引导设备的随机角误差是正态平稳随机过程。
其自引导概率为:
P=e-2λT,
(4)
其中,
λ=(1/2π)(σ′/σ)exp-{1/2σ2[(θ0.5/2)-ε]2};
σ为引导设备的角随机误差,ε为引导设备的角系统误差,σ′为引导设备的角随机误差变化率。
当引导设备热噪声引入的角噪声功率谱密度为均匀分布时:

(5)
式中,Βn为伺服宽带,θ0.5为被引导设备波束宽度,T为连续引导时间。
S引导Ka频段时,θ0.5= 0.065°,βn=2 Hz,T=0.5 s,TZ=2 s,σ=0.014°,ε=0.013 5°,可得单次引导概率Pn约等于70.8%。
综上所述,S频段引导Ka频段跟踪具有一定工程实现难度,需要针对低仰角和高仰角的捕获跟踪流程进行设计,提高Ka频段捕获成功率。
2 减小天线动态滞后设计
2.1 变积分PID伺服设计
变积分PID控制能够有效减小超调并缩短响应时间,从而减小环路的动态滞后。控制系统的响应时间和超调永远是矛盾的。在高精度的指向控制中,期望能够快速完成位置指向,又不希望超调过大,在正常收敛后还希望保持较好的动态响应特性,常规的PID控制已无法做到。
常规PID控制时,系统约有30%左右的超调,在指向过程中天线小范围抖动剧烈,无法精确指向目标。采用变速积分控制的修正型PID调节器能够达到较好的控制效果[7],PID参数调整方式如下:在角度偏差较大时,控制误差较大时,积分参数小,积分效果弱,环路类似于一型环路,能够快速、平稳运行,几乎没有超调;在角度偏差逐渐减小时,控制误差较小,积分参数逐渐增大,积分作用逐步加强,会带来一定的超调,但会提升动态性能;在角度偏差趋近于零时,控制误差已足够小,天线运行已趋于平稳,积分加强到正常值,保证系统有足够的加速度常数Ka,从而获得最小的动态滞后误差。
伺服环路中采用变积分PID控制,特别适用于目标捕获阶段,在低仰角捕获时采用小积分参数,降低伺服带宽,这样既可以提高捕获概率又能实现捕获和跟踪的平稳切换。当自跟踪平稳后再逐渐提高积分常数到正常值,以适应目标动态的变化。
2.2 计算机辅助跟踪设计
针对传统跟踪方式中存在的跟踪伺服系统的稳定性和高精度难兼顾的问题,提出了另外一种跟踪方式,即计算机辅助跟踪。计算机辅助跟踪,是复合控制技术的一种形式,在这种跟踪方式中,跟踪接收机输出的角误差信号不再直接驱动天线,而是首先和天线的机械转角相加,形成当前的目标角度位置测量信号,然后对此信号进行滤波平滑预测等处理后再作为跟踪伺服系统位置环的输入。
复合控制技术实现图如图1和图2所示,其实质是采用前馈方式扩大系统伺服带宽,缩短响应时间,提高环路的平稳性。计算机辅助跟踪的核心是前馈算法。在有程序引导数据为参考的前提下,前馈算法首先根据现有的实际角度数据对程序引导数据进行时间匹配和系统误差修正,使修正后的程序引导数据尽可能的精确,再以修正后的程序引导数据为基础,计算出目标的速度分量,经过数字滤波处理后,输出进行复合控制[8-9]。
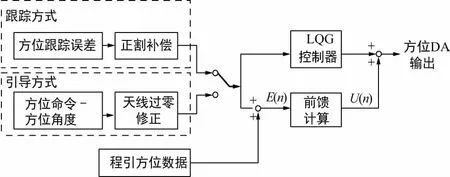
图1 方位复合控制实现框图

图2 俯仰复合控制实现框图
3 提高捕获Ka频段低轨卫星成功率设计
3.1 低仰角扫描捕获跟踪设计
对于遥感卫星S和Ka信号同时下传的情况,S频段3 dB波束宽度约为0.8°,在3°仰角情况下,考虑轨道预报误差(约0.1°~0.2°)及天线自身指向误差(约0.07°),卫星能落在S频段3 dB波束宽度内,S频段捕获、跟踪并迅速收敛,并实现1/20波束宽度的保精度跟踪(0.04°),但考虑Ka半功率波束宽度约0.06°,单侧0.03°,单次引导成功概率仍不超过80%。因此,设计在S波段稳定跟踪的情况下对S波段跟踪接收机输出的误差电压叠加少量的直流偏置电压,在跟踪状态实现天线指向的扫描,在满足捕获门限时进入Ka频段自动跟踪,如果Ka频段信号关闭或跟踪丢失后天线自动转回S频段自跟踪。扫描方式采用以目标运动的方位、俯仰角度为圆心的螺旋曲线扫描方式,可通过在ACU的方位俯仰误差电压叠加微量偏置实现。扫描半径可通过下述公式确定:
Rscan=|Es|+|Es-ka|-0.5*Rka-half,
(6)
式中,Es为S频段跟踪误差,Es-ka为天线的S频段和Ka频段的电轴一致性偏差,Rka-half为Ka频段半功率波束宽度。S波段最大值指向和Ka波段最大值指向差值为S频段跟踪误差绝对值与S频段和Ka频段的电轴一致性偏差绝对值的和,考虑在Ka频段的0.5倍半波束范围内,可以可靠转入Ka跟踪,故减去0.5倍Ka频段半波束宽度即为扫描半径。实际的扫描半径是可以变化的,为了搜索捕获可以适当增加,当Ka或X频段目标已在中心附近时,为了提高捕获概率及速度,可以适当减小搜索范围。扫描周期可结合天线伺服参数灵活配置,在工程实现中调试,考虑低仰角情况下目标运动速率较慢,设计为1 s。
另外,在初始捕获阶段,还可以采用变积分PID的方法,改善伺服系统的超调和过渡过程等暂态指标,提高系统捕获性能。
3.2 高仰角跟踪流程
当目标已经运动到中高仰角时,大口径天线在S频段引导Ka频段模式下目标运动速度较快,采用圆锥扫描来引导目标已经比较困难了,在不采取措施减小误差的情况下,将很难迅速引导捕获跟踪目标。
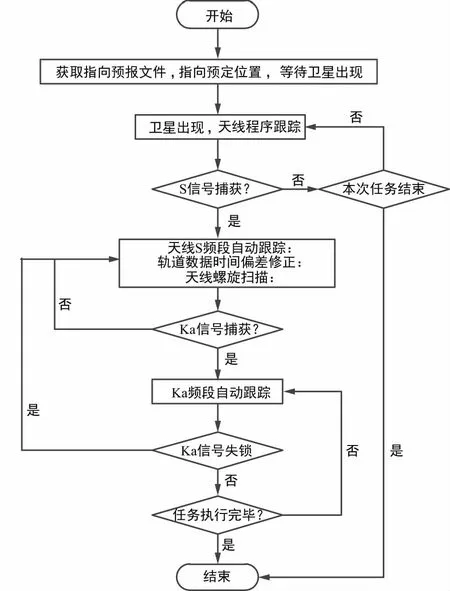
图3 系统跟踪工作流程
造成轨道预报数据偏差的一个重要来源是时间的偏差。由于时间的偏差,将会直接带来角度的偏差。高仰角时,可以采用时间偏差修正方法对轨道预报进行修正。时间偏差修正需要利用卫星实际指向的先验数据,可以在低仰角跟踪成功后获得,利用预报数据与获得的角度数据进行最小方差拟合,就可以获得时间偏差修正值。在高仰角S跟踪时,与低仰角天线扫描流程类似,利用修正后轨道预报指向与S跟踪实际指向的差值,对天线指向进行微调,并进一步依据天线反馈回的AGC电压和误差电压修正指向,直到满足Ka捕获跟踪门限,转入Ka跟踪为止。通过采用以上方法,可以避免高仰角跟踪时因为轨道时间偏差造成的Ka频段跟踪失败。
4 结束语
本文分析了大口径天线跟踪Ka频段低轨卫星时精度要求,并对关键的动态滞后误差进行了分析,提出了满足跟踪精度要求时的伺服系统加速度要求。为了达到伺服系统上述要求,设计了变积分PID伺服方式和计算机辅助跟踪方式,可有效减小天线动态滞后,提高跟踪精度。设计了Ka频段低仰角和高仰角不同的捕获跟踪流程,可有效提高Ka频段窄波束捕获成功率。在Ka/S双频段天线工程化实现时,需对上述涉及到的关键参数选取和实际效果进行验证。
[1] 李勇.Ka频段卫星通信系统天线的设计[J].无线电工程,2005,35(3):40-42.
[2] 王中果,汪大宝.低轨遥感卫星Ka 频段星地数据传输效能研究[J].航天器工程,2013,22(1):72-77.
[3] Roselló J,Martellucci A,Acosta R,et al. 26-GHz Data Downlink for LEO Satellites[C]∥ European Conference on Antennas and Propagation.IEEE,2012:111-115.
[4] 朱维祥,穆伟,王万玉,等.Ka频段遥感卫星数据接收系统跟踪性能测试新方法[J].电讯技术,2015,55(5):560-563.
[5] 吕洪生,杨新德,刘德军,等.实用卫星通信工程[M].成都:电子科技大学出版社,1994.
[6] 陈芳允.卫星测控手册[M].北京:科学出版社,1992.
[7] 刘金琨.先进PID控制及其MATLAI3仿真[M].北京:电子出版社,2003.
[8] 程望东.一种适用的复合控制算法[J].现代雷达,2003,25(4):48-54.
[9] 李忱.一种实现复合控制的新方法[J].现代雷达,1995,17(1):32-36.
ResearchonTrackingTechnologyforKa-bandLEOSatellite
XU Chong-yan1,ZHANG Yan-feng1,MENG Xiang-guo2
(1. Beijing Institute of Remote Sensing Information,Beijing 100192,China; 2. Space Star Technology Co.,Ltd,Beijing 100086,China)
When the large-aperture antenna tracks LEO Ka-band satellites,due to the half-beam width of Ka-band is very narrow,it is required that the antenna has more precise traceability. In the perspective of improving antenna tracking precision,this paper proposes the variable integral PID control method and computer-aided tracking method to reduce effectively the dynamic lag of antenna,and improve the tracking precision; in the perspective of optimizing the tracking capture process,it puts forward the different tracking capture strategies on low elevation and high elevation to improve the capture success probability of large-aperture Ka-band antenna. Based on simulation and engineering optimization,the above methods and strategies can be used to significantly improve antenna tracking accuracy,and implement high-accuracy tracking.
Ka band; LEO; variable integral PID; tracking accuracy; dynamic lag
TN82
A
1003-3114(2017)06-56-4
10. 3969/j.issn. 1003-3114. 2017.06.14
徐崇彦,张言锋,孟祥国. Ka频段低轨卫星跟踪技术研究[J].无线电通信技术,2017,43(6):56-59.
[XU Chongyan,ZHANG Yanfeng,MENG Xiangguo. Research on Tracking Technology for Ka-band LEO Satellite [J]. Radio Communications Technology,2017,43(6):56-59.]
2017-07-12
徐崇彦(1970—),女,高级工程师,主要研究方向:空间遥感卫星应用。张言锋(1976—),男,高级工程师,主要研究方向:空间遥感卫星应用。
猜你喜欢
电信科学(2022年11期)2022-12-08
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
初中生世界·九年级(2020年2期)2020-04-10
物联网技术(2019年9期)2019-11-06
科技视界(2018年9期)2018-07-27
汽车文摘(2017年9期)2017-12-06
传媒评论(2017年8期)2017-11-08
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12