
碗形海蜇皮螺旋切刀结构设计与有限元分析
2017-10-17 08:54王德强陶学恒王明伟王学俊芦金石
食品与机械 2017年8期
王德强 陶学恒 王明伟 王学俊 芦金石
(1. 大连工业大学辽宁省海洋食品加工技术装备重点实验室,辽宁 大连 116034;2. 国家海洋食品工程技术研究中心,辽宁 大连 116034)
碗形海蜇皮螺旋切刀结构设计与有限元分析
王德强1,2陶学恒1,2王明伟1,2王学俊1,2芦金石1,2
(1. 大连工业大学辽宁省海洋食品加工技术装备重点实验室,辽宁 大连 116034;2. 国家海洋食品工程技术研究中心,辽宁 大连 116034)
螺旋切刀是碗形海蜇皮自动切丝机最主要的工作部件,为了保证其在工作承受载荷时的稳定性、避免过量的弹性变形及良好的使用寿命,运用微分几何建立螺旋切刀刀刃线的数学模型,采用MATLAB模拟曲率和挠率大小及曲率与挠率随极角φ的变化规律,分析得出曲率最大值为1.57,最小值为0.012 47,挠率最大值为0.002 46,最小值为0。应用Solidworks软件建立螺旋切刀三维实体模型,将其导入到ANSYS Workbench中完成静力学分析,确定螺旋切刀结构的应力、应变和最大变形位置,验证了螺旋切刀结构设计满足使用性能要求。为研究碗形海蜇皮螺旋切刀的疲劳损坏、使用寿命和优化提供依据。
碗形海蜇皮;螺旋切刀;曲率;挠率;有限元分析
Abstract: The spiral cutter is the most important working part of the bowl jellyfish automatic cutting machine. In order to ensure the stability of the work, the elastic deformation and the good service life are avoided. The mathematical model of the cutter blade line is established by using the differential geometry. The curvature and torsional size and the law of curvature and torsion with polar angle are simulated by MATLAB. The maximum value of the curvature is 1.57, the minimum is 0.012 47, the maximum torsion is 0.002 46, and the minimum is 0. The three - dimensional solid model of spiral cutter was established by using Solidworks software, and it was introduced into ANSYS Workbench to complete the static analysis. The stress, strain and maximum deformation position of spiral cutter structure were determined, and the structure design of spiral cutter was proved to meet the performance requirement. The research results can provide a basis for studying the fatigue damage, service life and optimization of the bowl-shaped jellyfish screw cutter.
Keywords: bowl-shaped jellyfish; spiral cutter; curvature; torsion; finite element analysis
目前,对刀的设计与研究有很多,如:熊烽等[1]根据复杂刀具的设计要求,建立了复杂刀具的数学模型,并运用MATLAB实现了复杂刀具的三维可视化,刀具数学模型的建立为刀具加工奠定了基础;陈孟科等[2]完成了正转旋耕灭茬机刀片的曲线设计,从功率最小角度出发,对刀片上的各条刀刃曲线进行对比分析,得出侧切刃为阿基米德螺线,过渡刃为放射螺线,正切刃为空间曲线,为旋耕灭茬机整机性能的提高提供了依据;李文春等[3]对果园避障旋耕机旋耕刀片进行了不同工况下的受力分析与计算,得到了单刀受力的数学模型,应用Solidworks 软件建立了旋耕刀实体模型,基于ANSYS Workbench分别对旋耕左刀和右刀进行了不同工况的应力、应变与变形仿真分析,为分析特殊工况下旋耕刀失效形式、安全性能提供了方法,也为研究设计新型旋耕刀片提供了理论依据;葛云等[4]基于ANSYS 对微型旋耕机旋耕弯刀的应力进行了仿真分析,得出了应力集中的位置,并提高了产品设计的可靠性,降低了产品所消耗的材料。但未见对碗形海蜇皮切丝刀具的相关报道。
本研究切割对象为碗形海蜇皮(见图1)。目前销售到国内外的碗形海蜇皮丝,成品规格为宽8 mm,长200 mm丝状,见图2。然而据不完全统计大多数食品加工企业仍由工人使用修制弧形刃剪刀剪切成丝,劳动强度较大,切手事故频繁发生且切丝效率、成品率较低。针对以上的加工生产状况,设计了碗形海蜇皮螺旋自动切丝机,其中螺旋切刀是最核心部件。本研究基于微分几何建立螺旋切刀刃线的数学模型,应用MATLAB软件编程模拟螺旋切刀刀刃线的曲率和挠率,分析曲率和挠率随极角(φ)的变化,以及曲率、挠率的最大位置;应用Solidworks软件进行螺旋切刀三维实体建模,将其导入ANSYS Workbench中完成对螺旋切刀的静力学分析,为螺旋切刀的优化设计提供技术支持。

图1 碗形海蜇皮

图2 切好的成品碗形海蜇皮丝
1 碗形海蜇皮自动切丝机的组成与工作原理
碗形海蜇皮自动切丝机主要由链条、盛料下模、限位开关、步进电机、减速器、液压站、液压缸、接料桶、螺旋切刀、链轮、电控箱、脱料盘等组成(见图3)。机架是对碗形海蜇皮自动切丝机整体的支撑以及对切割过程冲击载荷作用的承载。链传动是用来完成碗形海蜇皮的自动进给上料;螺旋切刀是用来完成碗形海蜇皮的切丝作业。
碗形海蜇皮自动切丝机的工作原理:
(1) 启动设备后,工人把事先准备好的碗形海蜇皮原料放在指定的盛料下模2位置。
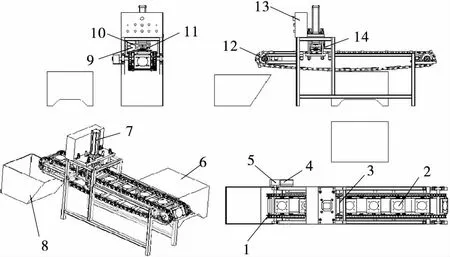
1. 链条 2. 盛料下模 3. 限位开关 4. 步进电机 5. 减速器 6. 液压站 7. 液压缸 8. 接料桶 9. 限位开关 10. 限位开关 11. 螺旋切刀 12. 链轮 13. 电控箱 14. 脱料盘
图3 碗形海蜇皮自动切丝机结构图
Figure 3 Bowl-shaped jellyfish automatic cutting machine structure
(2) 由电控箱13中PLC控制进步电机4提供动力带动减速器5转动,然后减速器带动链轮旋转从而驱动链条1带动盛料下模2完成自动进给上料,并由限位开关3控制停止位置,使待加工的碗形海蜇皮原料被送到螺旋切刀11的正下方。
(3) 再由电控箱13中的PLC控制液压站6中的液压泵给液压缸7提供动力,从而驱动金属刀架向下运动,当螺旋切刀11向下冲切时,限位开关9感应到金属刀架上的金属片时金属刀架停止运动,完成了冲切运动即完成了对碗形海蜇皮的切丝作业,然后由电控箱13中的PLC控制液压站6中的液压泵再给液压缸7提供动力,带动螺旋切刀11向上运动,同时脱料盘14在弹簧作用下发生回弹,防止海蜇皮黏刀,完成脱料作业,当限位开关10感应到金属刀架上的金属片时金属刀架停止运动,即螺旋切刀11又回到了初始位置等待下一次切割作业。
(4) 以此类推,重复2和3的步骤,可完成所有碗形海蜇皮原料的切丝作业。
(5) 被切割好的碗形海蜇皮丝随着链传动机构上的盛料下模2继续向前进给,自动滑落到接料桶8中,由工人切割成成品规格长度。
(6) 根据工作原理,绘制碗形海蜇皮自动切丝机2个工位切割过程的工作循环图,见图4[5]。

图4 碗形海蜇皮自动切丝机2个工位的工作循环图
2 螺旋切刀刀刃线数学模型的建立与分析
切丝部件结构由大导向销、液压缸、支撑大螺柱、液压缸垫板、液压柱塞定位块下板、螺旋切刀固定销、盛料下模、螺旋切刀上板、螺旋切刀上盖板、液压柱塞定位块上板、脱料盘、弹簧、螺旋切刀、螺旋切刀导向销、下支撑板、定位销、小导向销等组成,切丝部件结构图与爆炸视图见图5。
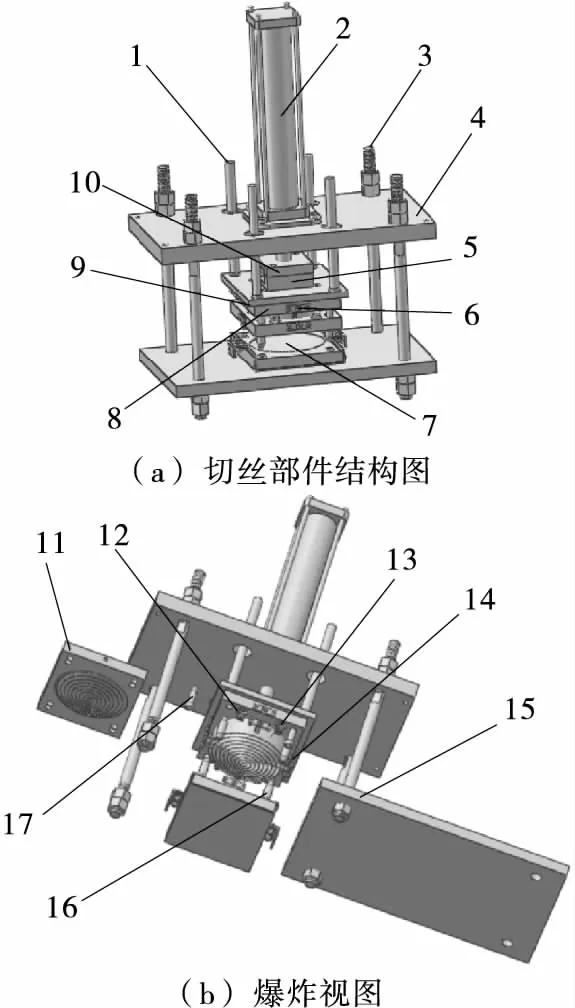
1. 大导向销 2. 液压缸 3. 支撑大螺柱 4. 液压缸垫板 5. 液压柱塞定位块下板 6. 螺旋切刀固定销 7. 盛料下模 8. 螺旋切刀上板 9. 螺旋切刀上盖板 10. 液压柱塞定位块上板 11. 脱料盘 12. 弹簧 13. 螺旋切刀 14. 螺旋切刀导向销 15. 下支撑板 16. 定位销 17. 小导向销
图5 切丝部件结构图与爆炸视图
Figure 5 Structure and explode view of shredder parts
2.1 螺旋切刀刀刃线数学模型建立


(1)
式中:

φ——极角,(°);

AP——球面上任意一点P到XOY平面的距离,mm;
∵∠OO1P=180°-2×(90-θ)=2θ,
(2)
式中:
∴OA=R×sin2θ,
(3)
式中:
R——球的半径,mm。
AP=R-R×cos2θ。
(4)
将式(3)、(4)代入式(1)可得:
(5)
∴螺旋刀刃线在XOY平面的投影方程为:
(6)

R×sin2θ=aφ,
(7)
式中:
a——平面等距螺旋线间距,mm。

(8)
将式(7)代入式(1)化简可得:
(9)
式中:

为了实现螺旋切刀刀刃线三维可视化,运用MATLAB软件模拟绘制出螺旋切刀刀刃线数学模型图,见图7[6]。
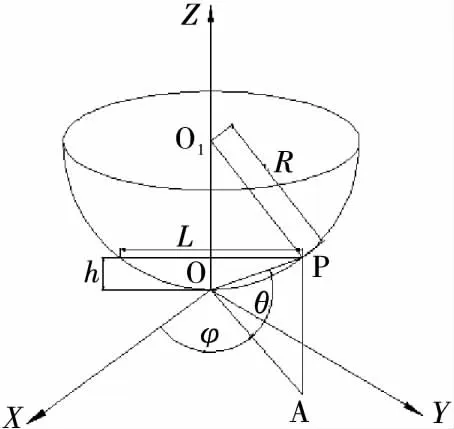
图6 球面上非等距螺旋切刀刀刃线推导图示
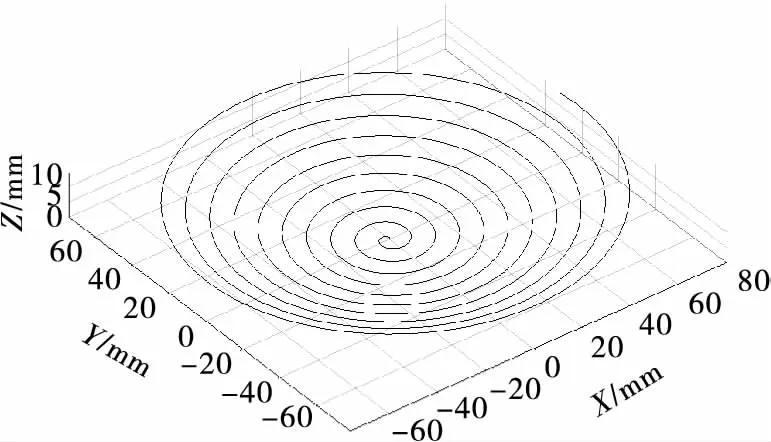
图7 螺旋切刀刀刃线数学模型三维图
2.2 螺旋切刀刀刃线曲率和挠率分析
空间曲线每一点的曲率和挠率都是弧长的函数,则有曲率k=k(s),挠率ω=ω(s),称为曲线的自然参数方程。
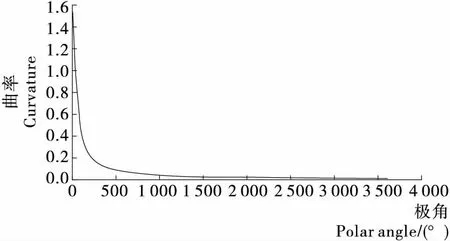
图8 螺旋切刀刀刃线曲率
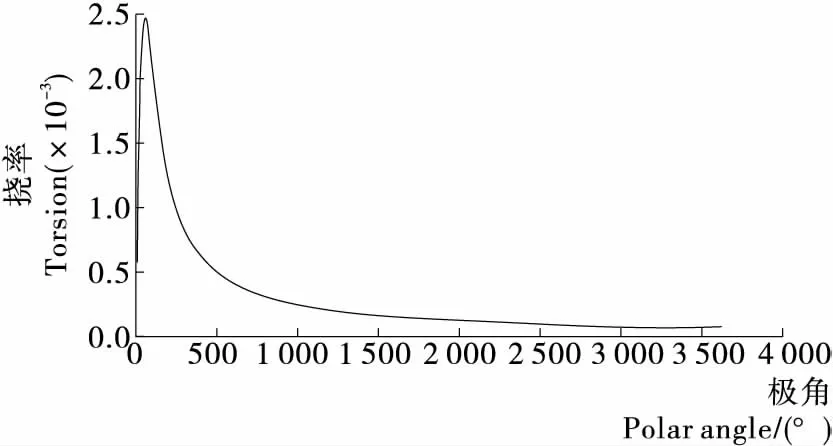
图9 螺旋切刀刀刃线挠率
3 螺旋切刀三维实体建模与有限元分析
3.1 切割力的确定
运用食品物性学检测仪器——质构仪(TA.XT plus型,英国Stable Micro System公司),检测探头规格为HDP/BC,对切割对象碗形海蜇皮做剪切力测试,可得宽10 mm样品剪切力值F为37 N,运用MATLAB编程求出空间螺旋线长S=2 533 mm,则总剪切力值约为:F总=F×S=9 372 N。
3.2 螺旋切刀的静力学分析
3.2.1 螺旋切刀三维模型建立与导入 将MATLAB绘制的空间非等距螺旋线的X,Y,Z坐标值导出到文本文件中,运用Solidworks中的通过X,Y,Z三点绘制曲线命令将保存的文本文件坐标值读入到Solidworks中,即可自动生成空间非等距螺旋线;再建立螺旋切刀刀刃矩形截面,长为150 mm,宽为1 mm,通过扫描命令完成螺旋切刀三维实体建模,用旋转切除命令截取螺旋刀的高度为75 mm;通过拉伸切除命令绘制定位孔和导向孔;最后将绘制的螺旋切刀三维实体模型保存为.x_t格式文件,导入到Worksbench 15.0中,见图10[9]。

图10 螺旋切刀导入
3.2.2 定义材料属性 不锈钢316广泛应用于食品器材,并且具有良好的塑性、韧性和强耐腐蚀性能,因碗形海蜇皮是经脱水后的半干品,含有大量盐分具有腐蚀性,因此,选用不锈钢316作为螺旋切刀刀具材料,见表1[10]。

表1 材料属性
3.2.3 划分网格 螺旋切刀单元划分采用ANSYS Workb-ench自带的自动网格划分功能,此方法可以根据模型的几何关系,自动将网格划分的稀疏得当,网格划分后的螺旋切刀见图11[11]。
3.2.4 施加约束 螺旋切刀通过螺旋切刀上板安装孔固定,并且螺旋切刀插入到螺旋切刀上板内,上部加盖螺旋切刀上盖板,因此将全部螺旋切刀安装孔和螺旋切刀上表面施加固定约束,见图12[12]。
图11 螺旋切刀划分网格
图12 螺旋切刀施加约束
3.2.5 施加载荷 螺旋切刀受力为底部螺旋切刀刀刃,载荷大小为9 372 N,施加载荷后的螺旋切刀见图13。

图13 螺旋切刀施加载荷
3.2.6 求解与分析 添加应力、应变和总变形项目进行求解分析,求解结果见图14~16。
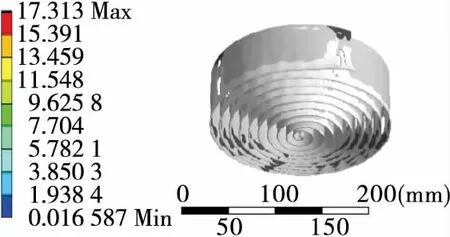
图14 螺旋切刀应力云图
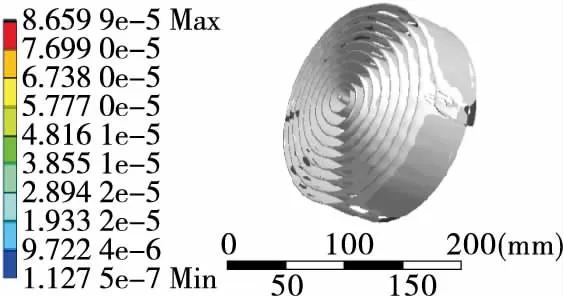
图15 螺旋切刀应变云图

图16 螺旋切刀变形云图
由图14可知,螺旋切刀切割时,最大应力17.313 MPa,远远小于不锈钢316屈服强度极限值,说明螺旋切刀有很大的优化空间;最大应力点位置为螺旋切刀最外圈刀刃尾部导向销孔和最内圈刀刃导向销孔位置,以上2处开孔且是单边支撑承受载荷,因此应力集中较大,与实际相符合。
由图15可知,螺旋切刀切割时,螺旋切刀的最大和最小应变与相同作业条件下,最大和最小应力位置相同,最大应变值为8.656 0×10-5mm/mm,最小应变值为1.127 5×10-7mm/mm,均在螺旋切刀最外圈刀刃尾部导向销孔和最内圈刀刃导向孔位置,说明此处承受载荷较大。
由图16可知,螺旋切刀切割时,螺旋切刀最大变形位置为最外圈刀刃尾部,刀尖处次之,说明切割时上述2处刚度最差,最大变形量为7.180 6×10-3mm,在刚度允许范围内。
4 结论
基于微分几何推导出了螺旋切刀刀刃线的数学模型,应用MATLAB软件模拟了螺旋刀刀刃线曲率、挠率大小及曲率与挠率随极角(φ)的变化规律;运用Solidworks建立了螺旋切刀三维实体模型,导入到ANSYS workbench进行了应力、应变和变形分析。分析结果表明:螺旋切刀曲率最大位置为极角0°处,最大值为1.57,曲率最小值位置为极角3 610°处,最小值为0.012 47;螺旋切刀挠率最大位置为极角60°处,最大值为0.002 46,挠率最小值位置为极角0°处,最小值为0;螺旋切刀最大应力和应变均为螺旋切刀最外圈刀刃尾部导向销孔和最内圈刀刃导向孔位置,说明在切割碗形海蜇皮过程中,上述2处是最薄弱的环节;最大变形位置为螺旋切刀最外圈刀刃尾部,刀尖处次之,表明以上2处是切割碗形海蜇皮时,螺旋切刀刚性最差部位,应采用工艺手段加强处理保证切割的稳定性。本研究为研究螺旋切刀的应力状态、疲劳寿命和螺旋切刀结构优化提供理论依据。
[1] 熊烽, 宾鸿赞. 复杂形状刀具设计的三维可视化[J]. 工具技术, 2002(4): 18-21.
[2] 陈孟科, 申屠留芳, 邵鹏. 正转旋耕灭茬机刀片的曲线设计[J]. 农机化研究, 2008(2): 107-109.
[3] 李文春, 王斌, 刘晓丽, 等. 基于ANSYS的果园避障旋耕机旋耕刀片有限元分析[J]. 江苏农业科学, 2017, 45(1): 193-197.
[4] 葛云, 吴雪飞, 王磊, 等. 基于ANSYS微型旋耕机旋耕弯刀的应力仿真[J]. 石河子大学学报: 自然科学版, 2007, 25(5): 627-629.
[5] 尚久浩. 自动机械设计[M]. 北京: 中国轻工业出版社, 2013: 17-23.
[6] 刘浩著. MATLAB R2012a 完全自学一本通 升级版[M]. 北京: 电子工业出版社, 2013: 202-204.
[7] 李晓豁, 张惠波, 战林, 等. 天轮处提升钢丝绳的曲率和挠率分析[J]. 世界科技研究与发展, 2012, 34(2): 198-200, 219.
[8] 王宪杰, 梁学忠, 谭艳华. 非定常螺距的螺旋线在自动流水线中的应用[J]. 电站系统工程, 2004, 20(5): 58-59.
[9] 马睿, 胡晓兵, 万晓东. 基于ANSYS的小型机器人小臂的有限元静态分析[J]. 机械设计与制造, 2012(9): 4-6.
[10] 韩玉坤, 段非, 姜永涛. XZ-1400上悬式离心机主轴的应力分析与结构优化[J]. 食品与机械, 2011, 27(4): 98-100, 108.
[11] 夏俊芳, 贺小伟, 余水生, 等. 基于ANSYS/LS-DYNA的螺旋刀辊土壤切削有限元模拟[J]. 农业工程学报, 2013, 29(10): 34-41, 293.
[12] 马爱丽, 廖庆喜, 田波平, 等. 基于ANSYS/LS_DYNA的螺旋刀具土壤切削的数值模拟[J]. 华中农业大学学报, 2009, 28(2): 248-252.
Structure design and finite element analysis of spiral cutter for bowl-shaped jellyfish
WANG De-qiang1,2TAOXue-heng1,2WANGMing-wei1,2WANGXue-jun1,2LUJin-shi1,2
(1.LiaoningSeafoodProcessingTechnologyandEquipmentKeyLab,DalianPolytechnicUniversity,Dalian,Liaoning116034,China; 2.NationalEngineeringResearchCenterofSeafood,Dalian,Liaoning116034,China)
10.13652/j.issn.1003-5788.2017.08.019
国家海洋食品工程技术研究中心资助项目(编号:2012FU125X03);海洋公益性行业科研专项经费资助项目(编号:201505029)
王德强,男,大连工业大学在读硕士研究生。
陶学恒(1963—),男,大连工业大学教授,博士。 E-mail:xhtao@dlpu.edu.cn
2017—03—06
猜你喜欢
湖南城市学院学报(自然科学版)(2021年2期)2021-04-24
设备管理与维修(2020年19期)2021-01-05
商品与质量(2020年31期)2020-12-18
当代陕西(2019年16期)2019-09-25
思维与智慧(2019年13期)2019-07-24
机械工程与自动化(2018年1期)2018-04-02
中国设备工程(2018年6期)2018-03-27
现代商贸工业(2016年23期)2017-02-04
浙江大学学报(工学版)(2016年9期)2016-06-05
统计科学与实践(2016年4期)2016-03-01
