果冻食品高速双面贴标机伺服系统主振频率研究
2017-10-17 08:54:04王振成冯宪民赵永杰
食品与机械 2017年8期
王振成 郑 路 冯宪民 赵永杰
(1. 中州大学机电与车辆工程学院,河南 郑州 450044;2. 郑州市公共交通总公司,河南 郑州 450054)
果冻食品高速双面贴标机伺服系统主振频率研究
王振成1郑 路1冯宪民2赵永杰2
(1. 中州大学机电与车辆工程学院,河南 郑州 450044;2. 郑州市公共交通总公司,河南 郑州 450054)
建立全自动果冻食品高速双面贴标机伺服系统的动力学模型,得出伺服系统的等效转动惯量和等效综合刚度;借助于伺服系统动力学方程,求得伺服系统的传递函数和主振频率;通过根轨迹图和系统振动稳定L(ω)曲线,指出提高系统传动刚度、削减工作机构惯性和惯性元件的失动量或提高阻尼,可以削弱谐振烈度;采用校正网络和综合贴标贴膜速度反馈亦可减弱谐振。
果冻;全自动高速双面贴标机;伺服系统;综合刚度;主振频率
Abstract: The dynamic model of the servo system of the high speed and double side labeling machine for the whole automatic jelly food production was established. The equivalent moment of inertia and the equivalent stiffness of the servo system were obtained. The transfer function and the main vibration frequency of the servo system were obtained by means of the dynamic equation of the servo system. Through the root locus diagram and system vibration stability curve, the measures and methods were gotten to avoid or reduce the vibration principle to improve transmission system stiffness and cut work mechanism inertia and inertial components, loss of momentum or increasing damping, which can weaken the intensity of resonance. Using the correction network and integrated labeling film velocity feedback could also weaken the resonant.
Keywords: jelly; High speed double side labeling machine for automatic jelly food production; servo system; composite stiffness; main vibration frequency
全自动高速双面贴标机广泛应用于食品、玩具、日化、电子、医药、五金、塑胶等行业;在产品的平面、大弧度面上,实现了高速自动贴附不干胶标签、不干胶膜、电子监管码、条形码之功能。诸如SD卡贴标、手机镜片贴膜、电子配件贴标、塑胶盒贴标等。极大提高了产品贴标、贴膜的贴附效率。使得贴附位置准确、质量好、稳定性高;解决了人工贴标可能出现的贴膜效率低,贴附歪斜、起泡和褶皱、贴附位置不规则等一系列问题;有效降低产品成本,提升产品标识美观度和产品竞争力。但由于高速工作,其伺服系统的自激结构振动,极大地影响了贴标和贴膜的质量[1]。本研究拟以全自动果冻食品高速双面贴标机(图1)为研究对象,探讨高速双面贴标机伺服系统的振动规律和主振频率,探究振动的原因,旨在避开振动频率的危险区域[2],提高贴标质量。

图1 全自动果冻食品高速双面贴标机
1 系统综合刚度的确定
全自动果冻食品高速双面贴标机伺服系统传动链由齿轮减速器、轴、丝杠副及直线运动工作台组成(图2)。设θmi(t)为伺服电机的转角(系统输入量),rad;x0(t)为工作台位移(系统输出量),m;i1、i2两级减速器的各级传动比;J1、J2、J3为轴Ⅰ、Ⅱ和Ⅲ上齿轮的传动惯量,kg/m2;m为工作台直线运动部件的质量,kg;B为工作台直线运动的速度阻尼系数,N·s/m;Ph为滚珠丝杠的基本导程(螺距),m;K1、K2和K3分别为轴Ⅰ、Ⅱ和Ⅲ的扭转刚度,N·m/rad;K4为丝杠及螺母座部分的轴向拉压刚度,N·m/rad;Tmi(t)为伺服电机的输出转矩,N·m。系统等效到电机轴上的总扭转综合刚度为K,N·m/rad。将图2等效成图3,再将图3合并等效成图4,可得系统等效综合刚度。
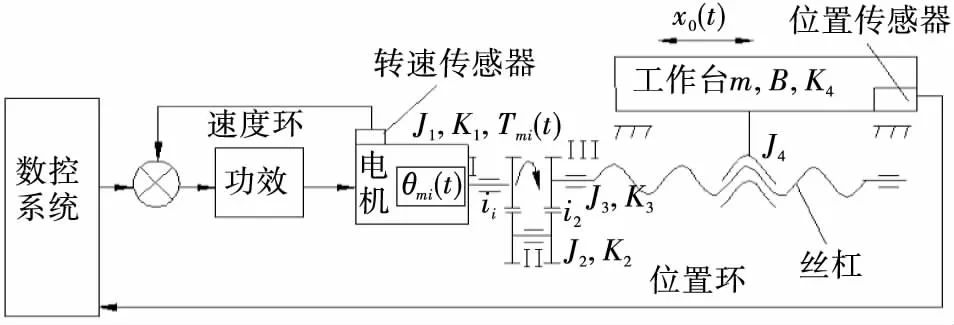
图2 闭环直流伺服控制系统图

图3 系统动力学模型简化图

图4 系统动力学模型等效图

(1)
整理得:

(2)
2 系统的传递函数

设作用在Ⅱ轴和Ⅲ轴上的转矩分别为T2(t)和T3(t),则可得出:
电机轴的扭转等效刚度方程:
(3)
电机轴的动力学方程:

(4)
Ⅱ轴的动力学方程:
(5)
Ⅲ轴的动力学方程:

(6)
联立式(3)~(6),消去Tmi(t)、T2(t)和T3(t),并进行拉式变换,经整理可得出系统关于电机转角的传递函数为:

(7)
令:
(8)
可理解为整个系统等效到电机轴上的等效转动惯量[3]。
3 主振频率


(9)
由式(9)可知,由于系统存在一个等效速度阻尼系数Beq,说明该系统不仅主振频率具有阻尼特性,且有一个纯积分转变的惯性环节。

图5 系统结构图

图6 系统结构图简化图
通常,机械系统在润滑良好的情况下Beq是比较弱的[5],若忽略它的次要作用,保留其主要作用时,式(8)可近似地写成:

(10)
式中:
ζ——振动系统的当量阻尼比,按式(11)计算。
(11)
则系统的主振圆频率为:

(12)
于是,得系统主振频率为:
(13)
用根轨迹法对式(10)进行因式分解并简化得:
(14)
式中:
τm——伺服电机的机电时间常数,s;
τ——机械系统自激振荡时间常数(可通过出厂试运行时获得),s;
τL——被控对象的等效时间常数,s。
作出对应于式(14)的等效结构图(见图7)和以τL为变量的根轨迹图(见图8)。


(15)


图7 等效结构图
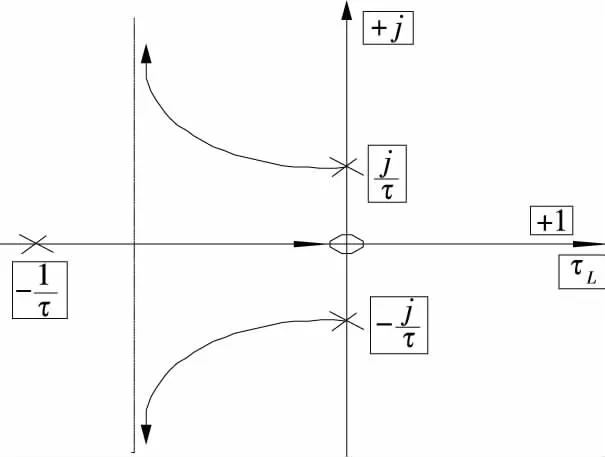
图8 根轨迹图
此时,式(14)可写成:
(16)


图9 弹性伺服系统稳定区域图
4 算例分析

各齿轮、II轴本身及丝杠轴转动惯量分别为:
(17)

(18)
(19)
取密度γ=7.8 ×104N/m3,g=9.8 m/s2;代入已知数据得:JZ1=1.535×10-5kg·m2,JZ2=122.335×10-5kg·m2,JZ3=2.072×10-5kg·m2,JZ4=289.518×10-5kg·m2。
丝杠轴的转动惯量Js=0.214×10-5kg·m2;
电机轴Ⅰ转动惯量JⅠ=Jm+JZ1=21.535×10-5kg·m2;
Ⅱ轴转动惯量JⅡ=J2+JZ2+JZ3=124.420×10-5kg·m2;
Ⅲ轴转动惯量JⅢ=JZ3+JS=362.868×10-5kg·m2。
利用式(8)可得整个系统等效到电机轴的转动惯量为Jeq=38.852×10-5kg·m2。




丝杠系统轴向拉压刚度的总刚度为:

将KⅠ、KⅡ、KⅢ及KⅣ代入式(2)求得系统总的扭转刚度为K=2.89×104N·m/rad。
分析:本实例结构谐振没有影响其稳定性的关键因素之一是加粗了长度较短的心轴II轴,从强度设计方面考虑,II轴直径取22.65 mm即可满足,这里为增强刚度而取40 mm,从而使系统的综合刚度也得以提高;其二,从数据上看导轨摩擦系数μ=0.05,且使用中用油脂润滑取代了稀油润滑,既使润滑系统得以简化,又提高了阻尼比,使谐振进一步得以削弱。
5 结论
(1) 鉴于振动的扩展和共振,图2的方式不宜用于大变速比的直流伺服电机和数控系统的高速连续控制的驱动系统中,在设计和使用全自动果冻食品高速双面贴标机时尤其要关注这一点。
(2) 提高系统传动刚度、削减工作机构惯性、增加阻尼、减少惯性元件的失动量或控制贴标频率在系统的通频带之外,不仅可以削弱谐振烈度,甚至可做到有效避振。
(3) 有必要指出,鉴于伺服系统的复杂性,结构谐振的主振频率和峰值可能不止一个,又由于系统的参数在设备长期使用时产生漂移,这将使谐振的主振频率不能保持稳定,加之伺服系统传动链的部分单元存在间隙、干摩擦等非线性因素的影响,使得在不同生产环境下高速连续工作的伺服系统的结构谐振特性颇显复杂,即便是同型号、同批次、同工作环境的全自动果冻食品高速双面贴标机伺服系统主振频率也表现迥异。
[1] 胡佑德. 伺服系统原理设计[M]. 北京: 北京理工大学出版社, 1993: 146-151.
[2] 晁勤. 自动控制原理[M]. 重庆: 重庆大学出版社, 2001: 176-182.
[3] 邱放. 基于ANSYS的压力容器爆炸事故原因及避免措施分析[J]. 食品与机械, 2009, 25(5): 93-94, 116.
[4] 常锋, 王振成, 刘瑞礼, 等. 巧克力裹包机正切型从动系统凸轮轴疲劳强度研究[J]. 食品与机械, 2013, 29(3): 165-168.
[5] 周开勤. 机械零件[M]. 北京: 高等教育出版社, 2001: 16-36.
[6] 高钟. 机电控制工程[M]. 北京: 清华大学出版社, 1993: 138-146.
[7] DINSDALE J P. Mechatronics and asics[J]. Annals of the CIRP, 1989, 2(38): 626-633.
[8] BRADLEY D A. Mechatronics: Electronics in products and processes[M]. London: Chpman and Hall, 1991: 39-63.
Study on the main vibration frequency of the high speed double side labeling machine servo system for automatic jelly food production
WANG Zhen-cheng1ZHENGLu1FENGXian-min2ZHAOYong-jie2
(1.SchoolofMechanicalandVehicularEngineering,ZhongzhouUniversity,Zhengzhou,Henan450044,China; 2.ZhengzhouGeneralCorporationofPublicCommunication,Zhengzhou,Henan450054,China)
10.13652/j.issn.1003-5788.2017.08.013
河南省重大科技攻关项目(编号:152102210365);河南省科技攻关项目(编号:102102210441);河南省教育厅科技攻关重点项目(编号:15A460042)
王振成(1959—),男,中州大学教授、高级工程师。 E-mail:zzwzc@163.com
2017—05—03
猜你喜欢
思维与智慧(2022年21期)2022-07-28 02:43:24
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
科技创新与应用(2019年26期)2019-10-24 08:49:44
时代金融(2019年7期)2019-04-23 00:52:58
小天使·一年级语数英综合(2018年5期)2018-06-22 10:27:56
天津农业科学(2014年4期)2014-05-23 23:00:08
食品工业科技(2014年15期)2014-03-11 18:17:42
振动、测试与诊断(2014年4期)2014-03-01 01:14:01
物理与工程(2010年1期)2010-03-25 10:01:51