
一种基于多极化散射机理的极化SAR图像舰船目标检测方法
2017-10-13 10:57曹雪菲张学峰王英华刘宏伟
电子与信息学报 2017年1期
文 伟 曹雪菲 张学峰 陈 渤 王英华 刘宏伟
一种基于多极化散射机理的极化SAR图像舰船目标检测方法
文 伟①②曹雪菲③张学峰①②陈 渤*①②王英华①②刘宏伟①②
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071);②(西安电子科技大学信息感知技术协同创新中心 西安 710071);③(西安电子科技大学网络与信息安全学院 西安 710071)
针对基于单一极化特性增强的极化SAR图像目标检测方法的缺陷,该文将DP(Dirichlet Process)混合隐变量SVM模型(DPLVSVM)应用于极化SAR图像舰船目标检测,提出一种基于多极化散射机理的检测方法。该方法通过联合Dirichlet过程混合与Bayes SVM模型,将信号空间划分成若干局部区域,然后在每一局部区域学习一个独立的极化检测器,并将各局部检测器进行组合实现全局多极化散射机理的目标检测。模型采用非参数化Bayes方法自动确定局部区域数量,在完全Bayes框架下,将局部区域划分及检测器学习进行联合优化,保证了各局部区域样本的可分性。另外,为了降低极化特征冗余,该文进一步提出带特征选择功能的稀疏提升DP混合隐变量SVM模型(SPDPLVSVM),提高模型的推广能力。该模型由于采用共轭先验分布,因而可以利用Gibbs采样方法进行高效求解。在RADARSAT-2数据上进行的实验验证了所提方法的有效性。
极化SAR;目标检测;Dirichlet过程混合模型;Bayes SVM;特征选择
1 引言
舰船目标检测是海洋监测中的关键课题之一,合成孔径雷达(SAR)因其可视化及全天候等特性,在舰船目标分类检测中具有重要应用。特别地,由于极化SAR(Polarimetric SAR, PolSAR)可以提供多通道极化数据,保留了目标的极化特性,可以有效提高检测性能。
事实上从机器学习的角度而言,检测问题可以视为一个两类目标的分类问题[19],更一般地,对于缺少目标先验信息时,检测问题则蜕化为异常检测问题。本文提出的基于多极化散射机理的极化SAR图像舰船目标检测方法,是从两类分类的角度对舰船目标进行检测。
针对单一极化增强方法不能同时对不同极化散射机理进行增强的缺陷,我们将DPLVSVM[20]模型应用于极化SAR图像舰船目标检测,提出一种基于多极化散射机理的极化SAR图像舰船目标检测方法。该方法通过联合Dirichlet过程和Bayes SVM模型,将数据空间自动划分成若干各聚类并在每个聚类中学习一个局部的最大边界分类器,通过将各局部分类器进行组合,实现全局的非线性分类。在该方法中,每一个局部分类器对应于一种极化散射机理检测器。通过将各局部检测器进行组合,从而实现全局基于多极化散射机理的检测。为了避免检测方法对能量的依赖,类似文献[21],我们将多种极化分解方法获得的极化分解特征进行联合,避免因单一极化分解特征带来的虚警率较高的问题。
考虑到不同极化分解方法之间,存在较高的相关性,不同极化方法获得的极化特征存在较高的冗余性。然而,对于分类检测问题,冗余的特征对分类是无益的,相当于噪声,甚至会影响分类检测的性能和模型的推广能力,因此在实际应用中去除冗余特征具有重要意义[22]。
为了消除冗余特征,在DPLVSVM模型的基础上,我们引入稀疏控制向量对特征进行选择,提出了稀疏提升DP混合隐变量SVM模型(Sparsity- Promoting Dirichlet Process mixture of Latent Variable SVM, SPDPLVSVM)模型。该方法将特征选择与检测分类进行联合学习,因而能选择出对识别有益的特征并且剔除冗余特征,在降低模型复杂度的同时增强模型的推广能力。
综合以上分析,我们将DPLVSVM模型应用于极化舰船目标检测中,进一步地,为了降低极化特征冗余,我们引入稀疏控制向量对特征进行选择,提出了SPDPLVSVM模型并将其应用于舰船目标检测。论文结构安排如下:第2节对极化特征提取进行介绍;第3节介绍基于DPLVSVM和SPDPLVSVM模型的多极化散射机理检测方法;第4节对实验进行描述并对实验结果进行比较分析;最后对本文进行总结。
2 极化特征提取
极化特性是对散射体形状结构,对称性等极化信息的描述,这些特征是不依赖于雷达回波强弱的。极化特性通常采用极化分解方法进行刻画。不同极化分解方法,可以获得不同极化基下的特征描述,不同极化分解特征间相互补充。类似于文献[21],我们将不同极化分解特征进行联合,相较于单一极化分解方法,通过这种联合,可以更全面地对极化特性进行表征。选择的极化分解方法包括Pauli分解,Carmon分解,Cloude分解,Freeman分解,Yamaguchi 5种。其中,前两种方法为相干极化分解方法,后3种方法为非相干极化分解方法。为了去除对能量的依赖,我们采用极化能量对特征进行归一化处理。
3 多极化散射机理极化SAR图像舰船目标检测
本文采用DPLVSVM模型,通过组合各局部极化检测器,实现全局基于多极化散射机理目标检测。考虑到不同极化方法获得的极化特征之间,存在一定的相关性,为了降低特征之间的冗余,在DPLVSVM 模型的基础上,引入稀疏控制变量对特征进行选择,提出了SPDPLVSVM 模型。通过对特征进行选择,可以约束模型的复杂度,从而增加模型的推广能力。下面先对这两个模型分别进行简要介绍,然后对模型进行求解。
3.1 Dirichlet 过程(DP)混合隐变量SVM模型(DPLVSVM)
DPLVSVM模型通过将Dirichlet 过程混合模型与Bayes SVM相结合[20],在原始数据空间对数据进行聚类,并在每一聚类中构建一个局部分类器。假定对于聚类,其中为预设的最大聚类数量,数据服从参数为的高斯分布,即
(1)
选用共轭分布Normal-Wishart分布作为先验分布,即,其中为给定参数。定义聚类的分类器系数的先验分布:,则DPLVSVM模型的层次化结构可以表示为式(2),式中对应于截棍长度[20],表示贝塔分布,表示多项分布,为Gamma分布函数,为其参数。
(2)
3.2 稀疏提升Dirichlet过程混合隐变量SVM模型(SPDPLVSVM)
(3)
值得注意的是,在我们的模型中,不同的局部区域可以选择不同的特征组合即不同的极化特征组合进行分类。根据层次化模型式(3),完全数据的联合分布可以表示为

其中,
3.3 模型推理
考虑到前述两个模型推理差别仅在于稀疏控制向量上,本文仅给出SPDPLVSVM模型的推理过程。由于模型参数的分布均选用共轭分布,可以采用Gibbs采样的方法进行高效求解[20]。由完全数据的联合分布式(4),可导出参数集合任一参数的条件后验分布。限于篇幅,在此,仅给出聚类指示变量和分类器系数的条件后验分布。聚类指示变量的条件后验分布为。

根据式(5),样本的聚类与分类损失相关,可以有效保证聚类内部数据的可分性。

其中,
根据各参数的条件后验分布对参数进行循环采样,可以构建一个Markov链。待采样平稳后,存储一定量样本作为模型的参数估计。
3.4 分类检测

(8)
4 实验
4.1实验设置
为了验证本文方法的有效性,将本文方法与PTD[4], PWF[7], RSD[16], SPAN[6]4种极化检测方法进行对比。采用C波段RADARSAT-2获取的某港口的全极化数据进行实验验证,方位-距离分辨率约为m。
本文提出的算法是针对像素级的检测算法,为了验证不依赖于能量的检测特性并对检测结果进行定量评估,采用与文献[17]相同的方法,通过从实测图像上截取海面区域和目标,生成不同信杂比(SCR)的仿真图像,根据不同的检测方法对仿真图像获得的检验统计量图像采用接收机操作特性曲线(ROC)及曲线下面积(AUC)进行定量评估。生成原始信杂比仿真图像如图1所示,在真实标记图像中目标标记为1。仿真图像大小为,其中包含3个仿真目标,从上至下,标号为1, 2, 3,其中目标1为一个较大的目标,目标2,目标3相对较小。仿真图像采用从实测图像中直接选取目标和海面区域生成,原始信杂比为22.56 dB。实验涉及的场景如图2所示。
训练样本的选取:如图2所示,选取矩形框1~3区域内分辨单元作为海杂波训练样本,类别编号为1;选取椭圆标记的7个目标作为目标训练样本,标记为类别2。
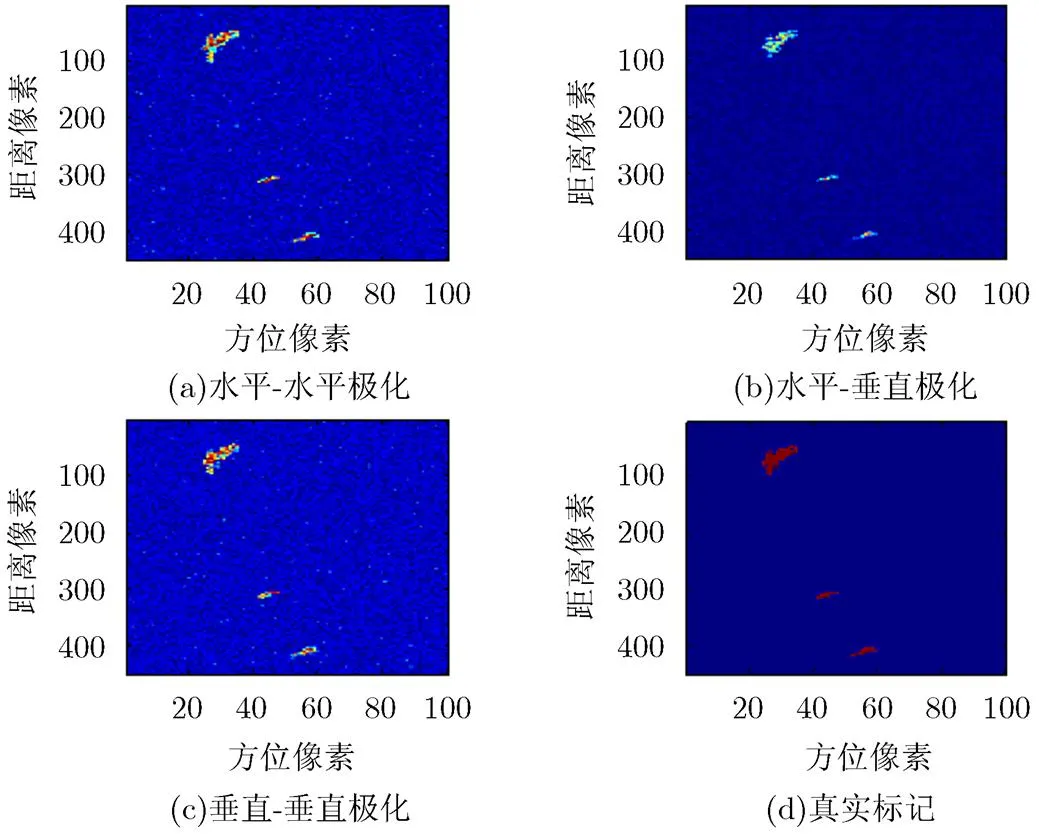
图1 仿真图像
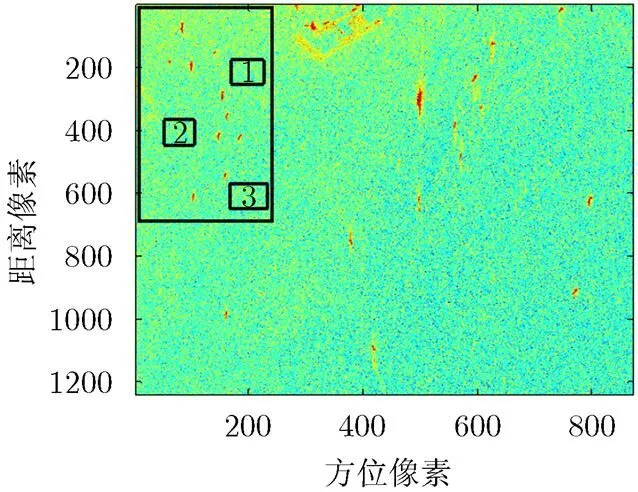
图2 实测场景SPAN图像
4.2实验结果及分析
在本节中首先对不同信杂比下的仿真图像进行检测实验,然后对图2所示实测场景进行检测实验。
不同方法获得的AUC随信杂比变化曲线如图3所示。随着信杂比提高,各检测方法获得的AUC逐渐升高,检测性能也随之提高。在信杂比较低时, DPLVSVM及SPDPLVSVM获得的AUC显著高于其他方法。信杂比为时,不同检测方法获得的ROC曲线如图4。本文方法获得的检测性能优于其他方法,这主要是因为本文方法采用对多种极化散射机理进行组合,且不依赖于能量。在本文所提两个方法中,SPDPLVSVM方法略优于DPLVSVM方法。SPDPLVSVM通过特征选择,消除了极化特征冗余,增强了模型的推广能力,因而获得了更好的检测性能。另外,在依赖于能量的检测方法中,PWF获得的性能相对较好。
SPDPLVSVM模型中,不同聚类选择的极化特征子集如表1。4个聚类均获得了较好的分类,从各个聚类选择的特征来看,选择特征各不相同,这反映了散射的极化特征呈多模分布的特性。从各个聚类选择的共有特征来看,二面角散射和极化散射熵对舰船和海面的区分性较好,这与文献[5,11]的结论是一致的。
为了验证本文方法的推广性能,对图2的整个场景进行检测。根据仿真图像上获得的结论,在依赖于能量的检测方法中,选用PWF方法进行对比,在不依赖于能量的检测方法中,选用PTD方法进行对比。本文所提方法中,仅对SPDPLVSVM的检测结果进行罗列。不同方法获得的检验统计量和虚警率设置为的检测结果如图6所示。目标真实位置在图6(a)根据人工辨识进行标注,并采用矩形方框进行标记,编号为1~24。对于回波能量较弱的目标采用椭圆进行标记,从左至右编号为a~e。
对比检测结果可以发现:(1)本文方法检测率更高。PTD方法漏警目标在图6(d)中用白色矩形框标记;(2)检测目标连续性更好。(3)相较于依赖于能量的PWF检测方法,本文方法能对弱散射目标更好地进行检测,在图6(f)中采用白色椭圆进行标记。
表1各聚类检测识别率及选取特征子集

聚类标号识别率选取特征子集 10.992Freeman: Pv; Yamaguchi: Pd; Cloude: H, 20.977Cameron:; Cloude: H, A 30.939Freeman: Pd; Yamaguchi: Ps, Pd; Cloude: H 41.000Cloude: H
5 结束语
本文将DPLVSVM模型应用于极化SAR图像舰船目标检测,提出了一种基于多极化散射机理的目标检测方法。为了降低极化特征冗余,本文提出了SPDPLVSVM模型。本文采用仿真数据和RADARSAT-2实测数据进行了验证,实验证明本文方法可以有效地抑制杂波,在信杂比较低时,保持较低虚警率条件下实现极化SAR图像舰船目标的检测。与PTD, RSD, PWF, SPAN等检测方法的对比,在低虚警率下本文方法可以获得更高的检测率。实验验证了本文方法是一种独立于能量的检测方法,可以用于对海面弱散射目标的检测。根据特征选择结果,本文模型选择的特征与现有的文献结果相似,即二面角散射分量和极化散射熵对舰船目标和海面具有较高的区分能力。

图3 不同方法AUC随信杂比变化曲线 图4 信杂比为0 dB时不同检测方法获得的ROC曲线比较 图5 聚类结果

图6 不同方法实测图像检验统计量及检测结果
[1] CRISP D J. The state of the art in ship detection in synthetic aperture radar imagery[R]. Technical Report DSTO-RR-0272, DSTO Information Sciences Laboratory, South Australia, Australia, 2004.
[2] TOUZI R, CHARBONNEAU F, HAWKINS R K,Ship- sea contrast optimization when using polarimetric SARS[C]. IEEE 2001 International Conference on Geoscience and Remote Sensing Symposium, Sydney, Australia, 2001: 426-428.
[3] 邢艳肖, 张毅, 李宁, 等. 一种联合特征值信息的全极化SAR图像监督分类方法[J]. 雷达学报, 2016, 5(2): 217-227. doi:10.12000/JR16019.
XING Yanxiao, ZHANG Yi, LI Ning,Polarimetric SAR image supervised classification method integrating eigenvalues[J].,2016, 5(2): 217-227 doi:10.12000/JR16019.
[4] ARMANDO Marino. A notch filter for ship detection with polarimetric SAR data[J]., 2013, 6(3): 1219-1232. doi: 10.1109/JSTARS.2013.2247741.
[5] YEREMY M, CAMPBELL J W M, MATTAR K,.Ocean surveillance with polarimetric SAR[J]., 2001, 27: 328-344. doi: 10.1080/ 07038992.
[6] NOVAK L M, MICHAEL B S, and MICHELE J C. Studies of target detection algorithms that use polarimetric radar data[J]., 1989, 25(2): 150-165. doi:10.1109/7.18677.
[7] NOVAK L M, BURL M C, and IRVING W W. Optimal polarimetric processing for enhanced target detection[J]., 1993, 29(1): 234-244. doi: 10.1109/NTC.1991.147989.
[8] YANG Jian, ZHANG Hongji, and YOSHIO Yamaguchi. GOPCE-based approach to ship detection[J]., 2012, 9(6): 1089-1093. doi:10.1109/LGRS.2012.2191611.
[9] LEE Jongsen, HOPPEL K W, MANGO S A,Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery[J]., 1994, 32(5): 1017-1028. doi: 10.1109/36.312890.
[10] WANG Yinghua and LIU Hongwei. PolSAR ship detection based on superpixel-level scattering mechanism distribution features[J]., 2015, 12(8): 1780-1784. doi:10.1109/LGRS.2015.2425873.
[11] 陈博, 王爽, 焦李成, 等. 利用0-1矩阵分解集成的极化SAR图像分类[J]. 电子与信息学报, 2015, 37(6): 1495-1501. doi: 10.11999/JEIT141059.
CHEN Bo, WANG Shuang, JIAO Licheng,Polarimetric SAR image classification via weighted ensemble based on 0-1 matrix decomposition[J].&, 2015, 37(6): 1495-1501. doi: 10.11999/JEIT141059.
[12] 崔浩贵, 刘涛, 蒋宇中, 等. 基于混合矩的极化SAR图像K分布模型参数估计新方法[J]. 电子与信息学报, 2015, 37(2): 328-333. doi: 10.11999/JEIT140551.
CUI Haogui, LIU Tao, JIANG Yuzhong,Parameter estimation for the K-distribution in PolSAR imagery based on hybrid moments[J].&, 2015, 37(2): 328-333. doi: 10.11999/JEIT140551.
[13] 杨学志, 叶铭, 吴克伟, 等. 结构保持的双边滤波极化SAR图像降噪[J]. 电子与信息学报, 2015, 37(2): 268-275. doi: 10.11999/JEIT140199.
YANG Xuezhi, YE Ming, WU Kewei,. Speckle reduction for PolSAR image based on structure preserving Bilateral filtering[J].&,2015, 37(2): 268-275. doi: 10.11999/JEIT140199.
[14] 刘璐, 刘帅, 焦李成, 等. 采用联合域字典稀疏表示的极化SAR图像分类[J]. 华中科技大学学报(自然科学版), 2016, 44(2): 81-85. doi: 10.13245/j.hust.160217.
LIU Lu, LIU Shuai, JIAO Licheng,. Combined dictionary learning based sparse representation for PolSAR image classification[J].(), 2016, 44(2): 81-85. doi: 10.13245/j.hust.160217.
[15] RINGROSE R and HARRIS N. Ship detection using polarimetric SAR data[C]. Proceedings of SAR Workshop: CEOS Committee on Earth Observation Satellites; Working Group on Calibration and Validation, Toulouse, France, 2000, 450: 687-691.
[16] HIROYUKI W, YUTA M, and KAZUKI N. Sea ice detection in the sea of Okhotsk using POLSAR and MODIS data[J]., 2013, 6(3): 1516-1523. doi: 10.1109/JSTARS.2013.2258327.
[17] WANG Na, SHI Gongtao, LIU Li,. Plarimetric SAR target detection using the reflection symmetry[J]., 2012, 9(6): 1104-1108. doi: 10.1109/LGRS.2012.2189548.
[18] 文伟, 王英华, 冯博, 等. 基于监督非相干字典学习的极化SAR图像舰船目标检测[J]. 自动化学报, 2015, 41(11): 1926-1940. doi: 10.16383/j.aas.2015.c140530.
WEN Wei, WANG Yinghua, FENG Bo,Supervise incoherent dictionary learning for ship detection with PolSAR images[J]., 2015, 41(11): 1926-1940. doi: 10.16383/j.aas.2015.c140530.
[19] KHALID E D, PETER M, DESMOND P,. Target detection in synthetic aperture radar imagery: A state of the art survey[J]., 2013, 7(1): 071598. doi: 10.1117/1.JRS.7.071598.
[20] 张学峰, 陈渤, 王鹏辉, 等. 一种基于Dirichlet过程隐变量支撑向量机模型的目标识别方法[J]. 电子与信息学报, 2015, 37(1): 29-36 doi: 10.11999/JEIT140129.
ZHANG Xuefeng, CHEN Bo, WANG Penghui,. A target recognition method based on Dirichlet process latent variable support vector machine model[J].&, 2015, 37(1): 29-36 doi: 10.11999/ JEIT140129.
[21] 赵一博, 秦先祥, 邹焕新. 基于目标分解和SVM的极化SAR图像分类方法[J]. 航天返回与遥感, 2013, 34(2): 50-56.
ZHAO Yibo, QIN Xianxiang, and ZOU Huanxin. Classification of polarimetric SAR image based on target decomposition and SVM[J].&, 2013, 34(2): 50-56.
[22] XU Danlei, DU Lan, LIU Hongwei,. Bayesian classifier for sparsity-promoting feature selection[J]., 2015, 29(6): 1-28. doi:10.1142/S0218001415500226.
[23] LEE J S, MITCHELL R G, THOMAS L A,Unsupervised classification using polarimetric decomposition and the complex wishart classifier[J]., 1999, 37(5): 2249-2258. doi:10.1109/36.789621.
文 伟: 男,1987 年生,博士生,研究方向为复杂背景下的SAR图像目标检测与识别.
曹雪菲: 女,1980 年生,博士,研究方向为网络与信息安全.
张学峰: 男,1987 年生,博士,研究方向为雷达自动目标识别.
陈 渤: 男,1979 年生,博士,教授,博士生导师,研究方向为雷达目标识别、统计信号处理、统计机器学习、深度学习网以及大规模数据处理.
王英华: 女,1982 年生,博士,副教授,硕士生导师,研究方向为SAR图像目标检测与识别.
刘宏伟: 男,1971年生,博士,教授,博士生导师,研究方向为雷达信号处理、雷达自动目标识别、认知雷达、协同探测等.
PolSAR Ship Detection Method Based on Multiple Polarimetric Scattering Mechanisms
WEN Wei①②CAO Xuefei③ZHANG Xuefeng①②CHEN Bo①②WANG Yinghua①②LIU Hongwei①②
①(,,’710071,);②(,’710071,);③(,,’710071,)
Considering the shortcoming of detection method based on polarimetric contrast enhanced with single polarimetric scattering mechanism, a PolSAR detection method based on multiple polarimetric mechanisms called Dirichlet Process mixture of Latent Variable SVM (DPLVSVM) is proposed. By assembling a set of local polarimetric detectors that based on single polarimetric scattering mechanism, a global multiple polarimetric scattering mechanisms detector is obtained. With a fully Bayes treatment, DPLVSVM learns the clustering and the local detectors jointly. Taking the advantage of Bayes nonparametric, DPLVSVM handles the model selection problem flexibly. Further, in order to reduce the redundancy of polarimetric feature and improve the model generalization, a model with feature selection, Sparsity-Promoting Dirichlet Process mixture of Latent Variable SVM (SPDPLVSVM), is proposed. Thanks to the conjugate property, the parameters in both of models can be inferred efficiently via the Gibbs sampler. Finally, the proposed models on RADARSAR-2 dataset is implemented to validate their effectiveness.
Polarimetric SAR; Target detection; Dirichlet process mixture model; Bayes SVM; Feature selection
TN958
A
1009-5896(2017)01-0103-07
10.11999/JEIT160204
2016-03-03;改回日期:2016-08-23;
2016-10-17
陈渤 bchen@mail.xidian.edu.cn
国家杰出青年科学基金(61525105),国家自然科学基金(61201292, 61322103, 61372132),全国优秀博士学位论文作者专项资金(FANEDD-201156),陕西省自然科学基础研究计划(2016JQ- 6048),航空科学基金(20142081009)和航空电子系统射频综合方针航空科技重点实验室基金,上海航天科技创新基金(SAST- 2015009)
The National Science Fund for Distinguished Young Scholars (61525105), The National Natural Science Foundation of China (61201292, 61322103, 61372132), The Program for New Century Excellent Talents in University (FANEDD-201156), The Natural Science Basic Research Plan in Shaanxi Province of China (2016JQ6048), The Aviation Science Fund (20142081009) and Key Laboratory Fund of RF Integrated Laboratory in Avionics System, Shanghai Aerospace Science and, Technology Innovation Fund (SAST2015009)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
现代财经-天津财经大学学报(2022年5期)2022-06-01
舰船科学技术(2021年12期)2021-03-29
电子测试(2017年15期)2017-12-18
商业经济研究(2017年5期)2017-03-23
文艺生活·中旬刊(2016年12期)2017-01-18
声屏世界(2016年10期)2016-12-10
舰船科学技术(2016年1期)2016-02-27
电源技术(2015年1期)2015-08-22
遥测遥控(2015年2期)2015-04-23
