深远海养殖平台的电力推进应用研究
2017-10-13 05:48黄温赟黄文超黎建勋赵新颖
船电技术 2017年4期
黄温赟,黄文超,黎建勋,赵新颖
深远海养殖平台的电力推进应用研究
黄温赟,黄文超,黎建勋,赵新颖
(中国水产科学研究院渔业机械仪器研究所,上海200092)
在海洋捕捞产量逐年减少的情况下,海洋品的供应将主要依赖水产养殖业的发展。我国近岸海域水土资源有限且受水质状况的限制,深远海水域却拥有着优质的水源、适宜的洋流性水温等得天独厚的优势,是发展现代水产养殖业和海洋经济的新空间,也是推进国家海洋战略的重要组成部分。深远海养殖平台是一种集深远海养殖、鱼苗培育、科考研究、渔获物初加工,渔船补给等功能于一身的整体解决方案。根据养殖平台的运行要求,结合电力推进系统的特点,创新性地将电力推进应用在这种大吨位、无动力定位、需跨洋作业的工作母船上。首先分析了电力推进在该养殖平台上应用的优劣势;并根据其实际运行工况,对在其上的电力推进系统配备设计方案;最后通过使用ETAP软件分析验证该方案的潮流、短路电流以及谐波,确定方案的可行性。
深远海养殖平台 电力推进 ETAP
0 引言
人们对水产品的需求也在不断提高,而我国陆上水产养殖的潜力已经挖空,以及对海洋渔业资源养护的需求,海洋捕捞产品又逐年减少,海上养殖已经成为人们获取海洋水产品的主要方式。相比近海养殖,深远海养殖凭借多样的优势已经成为世界各国养殖发展重点,而安全可靠的养殖设施装备成为了深远海养殖发展的关键。通过深远海养殖平台这样的载体,实现海上定居与生产,对我国海域资源的保护和开发,以及海域疆土的长期守护,具有战略意义[1]。
电力推进系统在船舶行业的应用越来越多,它不仅在海洋油气平台、海洋工作船等海工领域得到了广泛的应用,而且在邮轮、客船等商船领域也显示出越来越宽阔的应用前景。本文是对电力推进方式在深远海养殖平台的应用进行研究。
1 电力推进系统的特点
与传统的机械直接推进方式相比,电力推进系统在深远海养殖平台的应用主要有以下突出的特点:
1)机动性能好、更适合复杂工况
电力推进系统采用电动机直接驱动螺旋桨,扭矩响应速度快,螺旋桨由全速正转转换到全速反转的时间短。配置了全回转桨及艏侧推的船舶都可以在原地掉头,机动性能好。对于长时间漂浮于某海域作业的渔业养殖平台来说,动力系统需要长时间低负荷运行以保证不被漂移出某海域;相比于常规机械推进,电力推进系统灵活的运行方式更适合低负荷、复杂工况下运行。
2)系统冗余、生命力更高
电力推进系统使用多台柴油发电机组,多套推进器,变频器的模块化和推进电动机的多绕组形式,个别机组的故障不会导致整船丧失动力,仍可能降功率运行,动力系统有了冗余。对于长时间在不靠港的渔业养殖平台来说,增强了整船的生命力。
3)布局灵活、有效空间更多
与常规机械推进相比,电力推进船舶省却了传动轴系、减速齿轮箱,系统设备更多,但单台设备体积更小,可以在船上分散灵活布置,因此可以合理有效的利用空间。对于渔业养殖平台来说,可以增加渔舱舱容,提高经济效益。
4)振动噪声小、环境更舒适[2]
电力推进系统的电站中柴油机等工作在恒速状态下,振动比变速推进主机小,而且可以安装在水线以上,可以通过分散、封闭布置,采用较好的隔振装置,增加隔音罩等措施降低振动噪声。深远海养殖平台需要在变化多端的海况下给养殖创造一个安静低振的环境,电力推进船舶比常规机械推进船舶的振动噪音都有着良好的改善,更适合渔业养殖,同时住舱环境也得到改善。
5)减少排放物,更节能环保
深远海养殖平台运行工况复杂,变速较为频繁、推进负荷变化区间大。电力推进系统配置有多台柴油发电机组用于发电,可根据用电负荷选择投入运行的发电机组台数,使运行机组始终运行于高效工作区,保持燃油消耗率和碳氧化物、氮氧化物的排放最低,实现最大的燃油经济性,提高续航力,降低运行成本,实现节能环保[3]。
6)首次投资大,维护工作少
电力推进系统设备多,自动化程度高,价格也高,整船的建造成本会被推高。但同时由于静止部件多,维护工作量小:推进柴油机组的维护工作量比常规机械推进的柴油机少的多;推进电机一般只需要对轴承进行维护保养。大量电气元件的使用需要更高要求的电气设计,比如电力推进系统需考虑整船电力系统的谐波;同时也对操作船员提出了新的要求。
2 推进系统设计方案
根据设计书的要求,深远海养殖平台设计为长期在远离陆地、水温水质适宜的深海海域进行经济性鱼类养殖,同时可为平台周边作业渔船进行收鲜加工、物资补给等;平台需在恶劣海况下安全生产,应具有良好抗沉性的要求;平台有游弋式航行要求、躲避恶劣海况的航速要求和机动灵活的操纵性要求。本平台总体设定载重吨约为十万吨,设计有两种工况:一种是在定位于某特定的作业区域内,调整平台的位置及姿态,艏侧推可能需要全负荷运行,主推进器功率则无需满负荷运行,平台具备一定的抗风浪能力,经济航速5 kn;另一种是作业区域转移,和商船一样,平台由A地驶往B地,艏侧推未投入使用,主推进器全功率运行,最大航速10 kn。
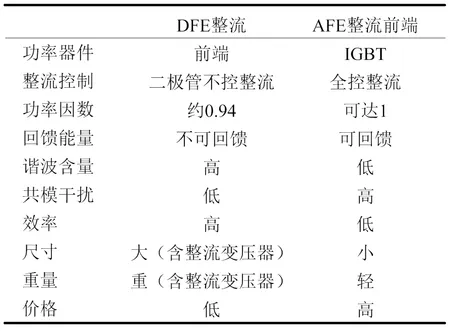
电力推进电机有不同的类型,直流电动机,交流同步电动机和交流异步电动机。变频器也有电流型变频器,电压型变频器等类型,其中电压型变频器应用范围比较广,其有两种整流前端,DFE和AFE。
DFE前端使用的功率器件是二极管。二极管单向导电,是不可控器件。变频器中的整流器一般为三相全控整流,即6脉冲整流,会产生5、7、11、13等次谐波,谐波含量很大,造成输入功率因数降低和电流谐波增高。在采用双机双桨的船舶电力推进系统中,常见的是配备2套12脉波移相变压器来减少谐波;对于整船电网来说,相当于配置了虚拟24脉冲变频器[4]。
AFE整流前端使用的是可控型电力电子器件IGBT(Insulated Gate Bipolar Transistor,绝缘栅双极型晶体管),利用PWM整流器实现AC/DC的电能变换。利用相应的控制方式可以使输入电压和电流保持同相或反相,从而使前端整流器工作在逆变或者整流状态。进而可以消除谐波,提高功率因数,回馈能量,保持直流母线电压恒定。
根据养殖平台总体初步的型线及阻力,推进系统估计需要提供6800 kW功率以达到10 kn航速。考虑推进器价格及冗余设计,主推进器选择两个3500 kW的全回转Z型推进器,提供船舶航行主动力;船首配置了两个1250 kW的艏侧推,以提供船舶侧向推力。
为了减少整船电力系统谐波干扰和设备数量及尺寸,Z型推进器采用AFE变频器驱动。推进电机采用交流异步电动机,选全淡水冷却方式以缩小电动机体积并增强冷却效果;由于电站容量足够,艏侧推选用软启动器启动,以节省成本。
3 电力一次系统图
根据初步电力负荷计算书的估算,考虑同时使用系数,平台系统负载总功率为2000 kW,加上推进功率,整船电站总功率可达1 MW。为了经济性考虑,平台推进电压选用中压6.6 kV;考虑平台需要给作业渔船补给,其余负载电压选用380 V,同时也配备220 V输出;频率选择和国内渔船相同的50 Hz。
中性点接地系统为绝大多数中压电力系统所采用,本平台选用中性点高电阻接地方式,其原因是:中压系统对地电容电流较大,当发生单相接地故障时,不接地系统可能引发火灾。接地系统能自动检测出故障点,并可自动切除故障;中压电力设备的绝缘水平较低,当运行中产生的过电压超过设备的耐受电压标准时,安全运行性能将会受到破坏[5]。在电力推进系统中,变频器、推进电机之间加装接地电缆,实现可靠接地。
电力系统设计中未考虑动力定位,但体现了冗余。系统采用4台2500 kW发电机;包含一套6.6 kV主配电板,一套380 V主配电板,一套220 V主配电板,一套380 V应急配电板,一套220 V应急配电板,每套主配电板均为由两段汇流排组成;6.6 kV主配电板中间联络开关设置为常闭,以均衡分配各发电机的功率,380 V和220 V主配电板中间联络开关设置为常开。6.6 kV转380 V选用两套额定为1500 kVA双绕组变压器,选用较大容量是为了防止一台变压器故障不会引起整个系统瘫痪,平台依旧能保持正常运行;380 V转220 V变压器容量同理配置。见图1。
4 基于ETAP的电力系统分析
ETAP软件是美国OTI公司研发的全图形化的电力系统仿真分析、计算高级应用软件。ETAP计算软件是包括电力系统设计和测试功能的综合分析工具,可实现电力系统的潮流分析、短路分析、谐波分析等,以帮助设计人员对其设计的电力系统可行性进行估算[6]。
表1 DFE和AFE整流前端比较
计算前需要在ETAP软件中建立单线图模型。建模分为两步:一是建立单线图,二是输入数据。将添加的各电气元件的端子连接起来即可建立起单线图;然后对各个电气元件的参数进行设定,ETAP元件库中集成了知名厂家电气元件的数据模型,可根据需求直接选择,如未选择到所需数据也可手动输入各项参数。
4.1 潮流分析
ETAP潮流分析程序计算母线电压、支路功率因数、电流、和整个电力系统的潮流。该程序中允许进行调节平衡节点电压,不调节多个电源与等效电网和发电机的连接。程序还可以计算传输电缆电压降。
ETAP默认设置中包含临界和边界两类警报,低于95%和高于105%将触发临界报警,相应的电气元件飘红,低于98%和高于102%将触发边界警报,但显示在报警视窗中。
作业工况下,主推进器功率限定在其额定功率的60%。由上图可获知该电站在作业工况下发电机及电路上的有功功率,无功功率;各汇流排电压值;各电缆压降值等。系统无飘红元件,满足要求;MCC2汇流排由于位置距离380 V配电板远,电缆压降大,电压微低;220 V应急配电板由于电力经过多道的转移,损失较大,电压偏低。发电机有功功率计算值为2363 kW,使用率达94.5%,满足电力推进系统的要求。
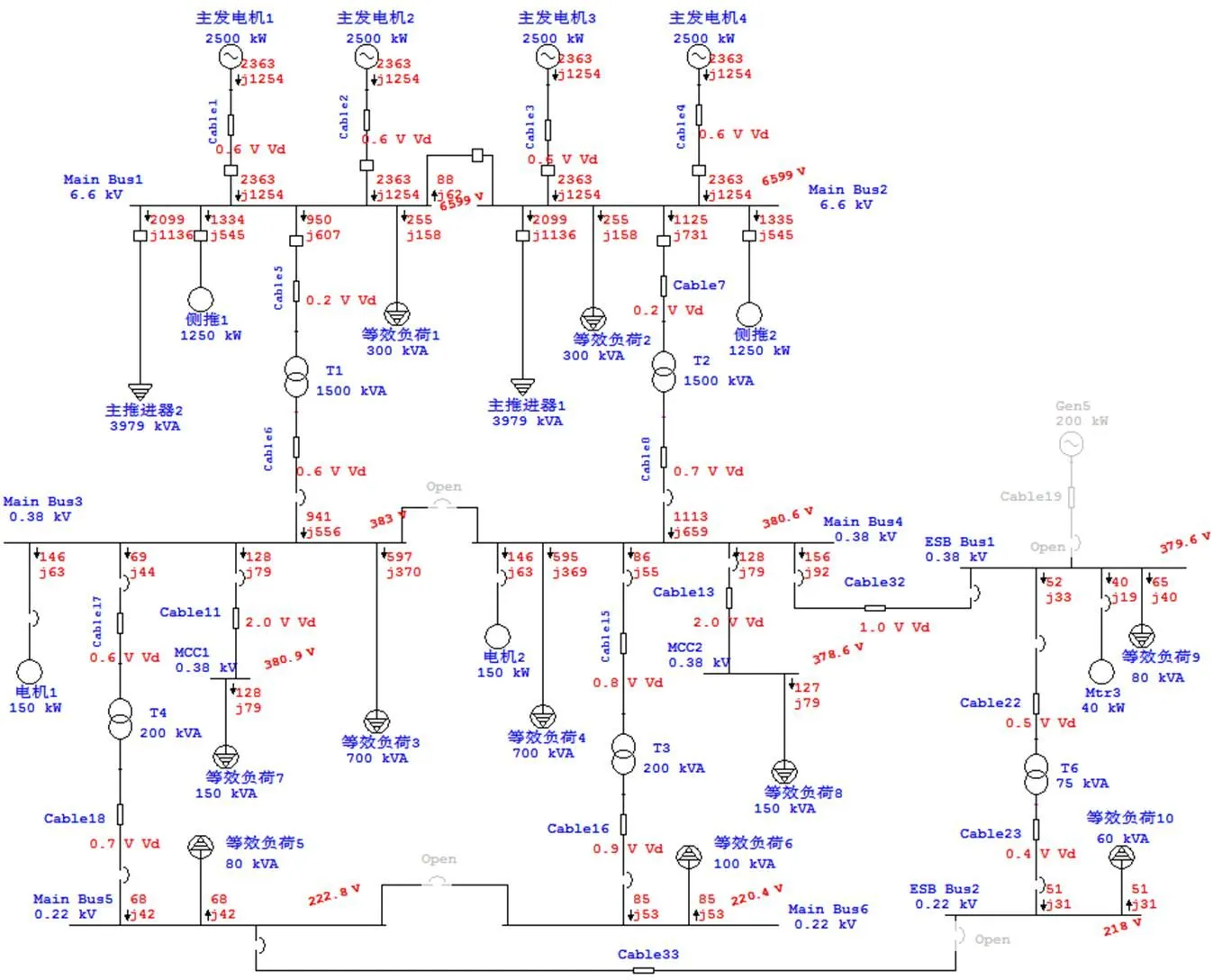
图1作业工况潮流计算
转场工况下,艏侧推未使用,尾推满负荷运行。由上图可获知该电站在作业工况下发电机及电路上的有功功率,无功功率;各汇流排电压值;各电缆压降值等。系统无飘红元件,满足要求;MCC2汇流排由于位置距离380 V配电板远,电缆压降大,电压微低;220 V应急配电板由于电力经过多道的转移,损失较大,电压偏低。发电机有功功率计算值为2317 kW,使用率达92.7%,满足电力推进系统的要求。
4.2 短路电流分析
ETAP 短路电流计算模块提供了IEC、ANSI和GOST三种短路电流计算标准。本文选择IEC标准进行短路电流计算。由于主推进器采用AFE变频控制方式,对主电网并不贡献短路电流,所以作业工况下的短路电流比转场工况下的短路电流要大。本文只计算作业工况下的短路电流,如图4所示。各配电板开关选择ETAP库中ABB的中压/低压开关,计算结果显示系统中最大的短路电流出现在380 V主配电板上(40.0 kA),低于之前选用的短路电流为65 kA的低压断路器;6.6 V主配电板短路电流计算值为9.5 kA,低于之前选择的短路电流为25 kA的中压断路器,满足要求。系统中380 V主配电板和应急配电板负载开关飘红,显示为短时耐受电流超过负载开关的额定值,表明当380 V主配电板短路时其上的负载开关均跳闸。
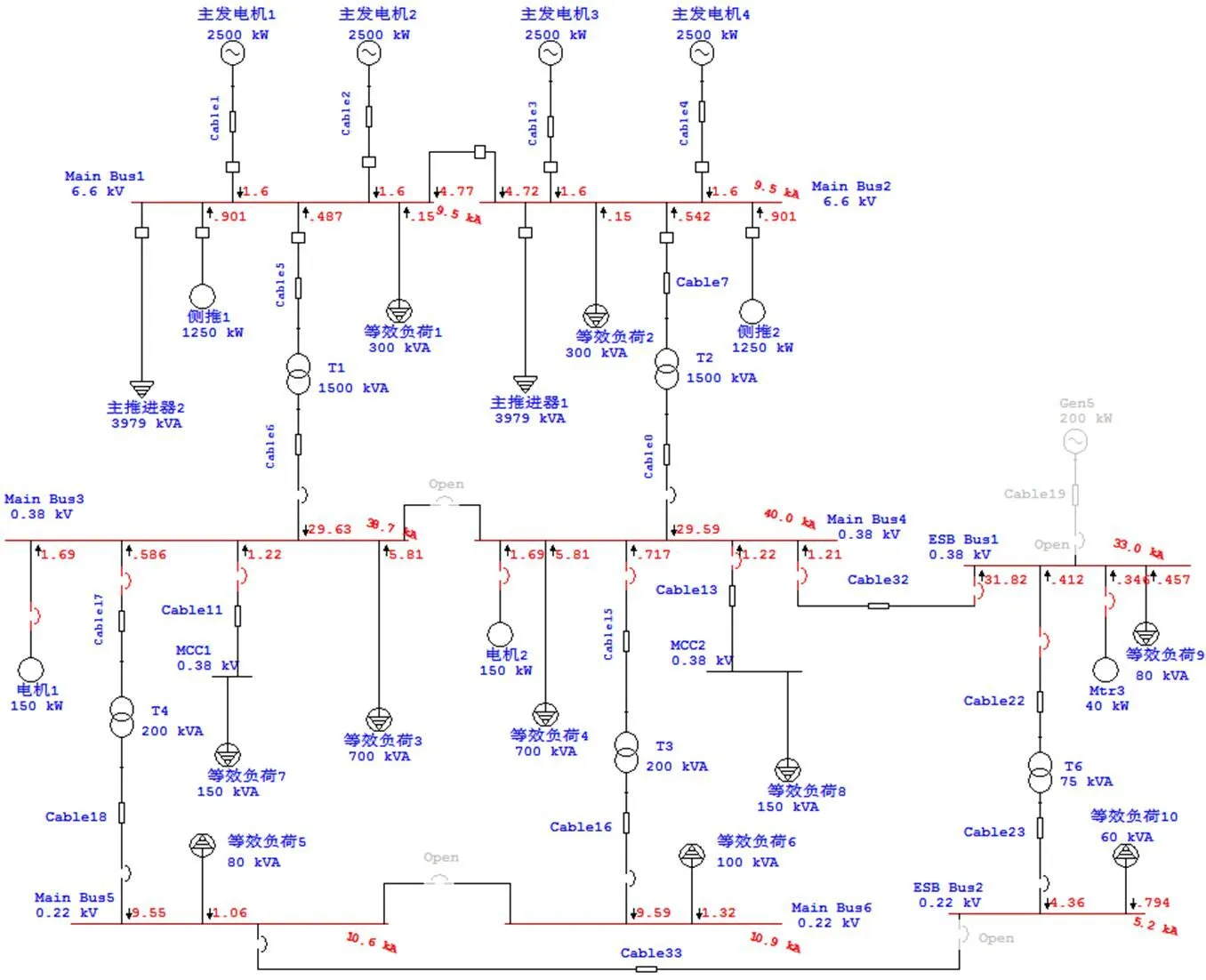
图3作业工况下短路电流计算
图4各主配电板谐波计算
4.3 谐波分析
ETAP谐波分析基于IEEE5l9标准,可实现谐波分析、谐波共振和频率扫描分析,对电压电流总RMS值、电压电流总合成峰值、谐波失真度进行分析[7]。ETAP中谐波源有模拟电压谐波源和电流谐波源,软件元件库已经自带知名厂家如Rockwell、ABB等各种谐波源类型及用户可扩展的谐波源库,也可以自定义添加。
本系统由于选用了ABB的AFE作为主推进器的控制方式,主推进器变频器造成的电网谐波畸变很小;发电机功率因素选择0.8,超瞬态电抗选择25%,计算后系统内谐波畸变很小,2%以内,可满足各大船级社的谐波要求。
5 结论
通过以上分析可知,电力推进在深远海养殖平台的应用具有可行性,也有着一系列的优势;但电力系统设备繁多、系统复杂、初期投入大、船员要求高等原因有着一定的制约。随着电力电子技术的不断发展,电力推进在经济和实践上有着更有利的条件。另外,永磁电机、超导技术、燃料电池、超级电容器等研究也已经有了一定的进展。这些技术一旦有所突破将使电力推进形成对原动机直接推进的绝对优势。电力推进的性价比越来越高,在未来资源的短缺,环保要求逐年提高的大环境下,将可能成为主流推进方式。
[1] 徐皓, 谌志新, 蔡计强, 等. 我国深远海养殖工程装备发展研究[J]. 渔业现代化, 2016, 43(3): 1-6.
[2] 张志强, 马继坤, 鹿志祥, 等. 渔业科考船电力推进系统概述与分析[J]. 船电技术, 2015, 35(8): 70-75.
[3] 何章峰. 电力推进系统在PSV的应用和实践[J]. 中国水运, 2015, 15(8): 141-143.
[4] 王平阳, 赖晓阳, 徐红成. 电力推进船舶电网谐波控制[J]. 船电技术, 2015, 35(3): 48-51.
[5] 刘波, 陈明, 候锦福, 等. 船舶综合电力推进应用探讨[J]. 广东造船, 2014, (6): 81-82.
[6] OTI公司.ETAP 12.6 用户指南[Z]. 2014.
[7] 柯常国, 吴春吉, 李莉红. 基于ETAP的电力推进系统仿真分析[J]. 船电技术, 2016, 36(2): 71-77.
Application of Electric Propulsion System to Deep Sea Aquacultural Platform
Huang Wenyun, Huang Wenchao, Li Jianxun, Zhao Xinying
(Fishery Machinery and Instrument Research Institute, Chinese Academy of Fishery Sciences, Shanghai 20092, China)
U662.3
A
1003-4862(2017)04-0015-05
2016-09-15
上海市科委项目“大型海上深远海养殖平台总体设计研究”(15DZ1202100)
黄温赟(1985-),男,硕士,电气设计员/工程师。研究方向:船舶电力推进。
猜你喜欢
商品与质量(2021年43期)2022-01-18
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电力系统及其自动化学报(2016年5期)2016-12-01
作文大王·笑话大王(2016年6期)2016-06-22
作文大王·笑话大王(2016年4期)2016-04-27
作文大王·笑话大王(2016年3期)2016-03-11
作文大王·笑话大王(2016年1期)2016-02-24
电源技术(2015年11期)2015-08-22