车载移动测量系统装备研制与应用
2017-10-13 02:28:44向泽君
测绘通报 2017年9期
明 镜,向泽君,龙 川,吕 楠
(1. 重庆市勘测院,重庆 401121; 2. 重庆市移动测量工程技术研究中心,重庆 401121; 3. 重庆数字城市科技有限公司,重庆 401121)
车载移动测量系统装备研制与应用
明 镜1,2,向泽君1,2,龙 川2,3,吕 楠2,3
(1. 重庆市勘测院,重庆 401121; 2. 重庆市移动测量工程技术研究中心,重庆 401121; 3. 重庆数字城市科技有限公司,重庆 401121)
为实现空间信息的快速及高效获取,在集成GNSS、IMU、全景相机、激光雷达等主要传感器的基础上,研制了车载全景激光耦合式移动测量系统。根据精密解算的位置姿态信息,对全景影像和激光点云进行了耦合,生成含有真彩色点云的可量测实景影像,提出鸟瞰实景影像、基于浏览器的海量点云网络发布等点云应用新形式。该系统在渝武高速公路扩能改造工程快速移动测量中的成功应用,证明系统不仅安装简便、采集快速、处理高效、成果丰富,而且具备厘米级的测量精度,有效提高了空间信息的获取及处理效率。
车载移动测量系统;全景激光耦合;可量测实景影像;海量点云网络发布;鸟瞰实景影像
Abstract: To realize the fast and efficient acquisition of spatial information, a vehicle mobile mapping system is developed on the basis of integrating sensors such as GNSS, IMU, panoramic camera and LiDAR. According to the precision solution of position and orientation, the panoramic image and the laser point cloud are coupled to generate a measurable panorama with true color point cloud. New forms of application are also brought out, such as the aerial view panorama and the browser-based massive point cloud publishing. The successful application of the system during the rapid mobile mapping in the Yuwu Expressway expansion project has proven that the system not only has the advantages of simple installation, rapid acquisition, high efficiency, fruitful results, but also has the measurement accuracy of centimeter level.
Keywords: vehicle mobile mapping system; coupling of panorama and laser point; measurable panorama; Web publishing of massive point cloud; aerial view panorama
高速发展的城市建设,离不开测绘地理信息数据的支撑。研发车载移动测量系统,轻松、快速、高效地获得信息更全、精度更高的地理信息数据,已成为当前测绘装备研究的前沿方向[1-5]。然而,受限于国外移动测量产品的技术垄断,此类系统在国内的销售价格昂贵。其次,这些产品的测量精度目前还处在分米级,难以满足大比例尺地形图测绘的需要[6]。再次,由于缺乏配套的行业应用软件,客观上也阻碍了系统的深入应用[7-8]。综合以上3个方面的考虑,从2009年开始了移动测量系统的自主研发,经过6年的攻关,成功研制了车载全景激光耦合式移动测量系统,并在多个行业开展了推广应用[9-14]。
1 关键技术
为了获取精密耦合的全景影像和激光点云数据,需要通过系统硬件集成,实现多种传感器的连接、通信、同步及协同工作;在此基础上,建立多传感器原始数据联合解算并转换生成成果数据的数据生产技术体系;在数据解算和转换过程中,必须严格控制误差,保证成果数据具有足够高的测量精度;形成基础成果数据后,开展基于真彩色点云应用,创新成果应用形式。因此,本系统研发过程主要包含如下4项关键技术。
1.1 硬件系统集成
1.1.1 设备选型
移动测量系统集成了全球导航卫星系统(GNSS)、惯性测量单元(IMU)、激光雷达(LiDAR)、全景相机等主要传感器,是一种多传感器系统,因此,设备选型是系统研发的第一步,并且对数据成果的精度和质量至关重要。本研究中,综合考虑设备造价、技术参数等多种因素,最终选择Trimble R7作为移动站的GNSS接收机,IMU选择了国产军工产品POS2011,LiDAR选型为德国Sick,全景相机选择了Ladybug。
1.1.2 系统总线
系统总线是连接整个系统所有传感器与电子设备的通信电路与设备的总和。系统工作时,利用时间同步器对所有设备授予统一时间基准。各传感器采集原始数据,通过系统总线将数据传递到工控机进行汇总。同时,用户通过平板电脑对系统进行命令发送,或实时监控各传感器的运行转态。各设备的电源控制通过网络继电器进行控制。平板电脑通过无线网络与工控机连接,实现设备的控制、参数设置与实时监控等功能。系统总线图如图1所示,它解决了各模块、各传感器之间的网络互联,使得整个系统在统一调度下进行协同工作。
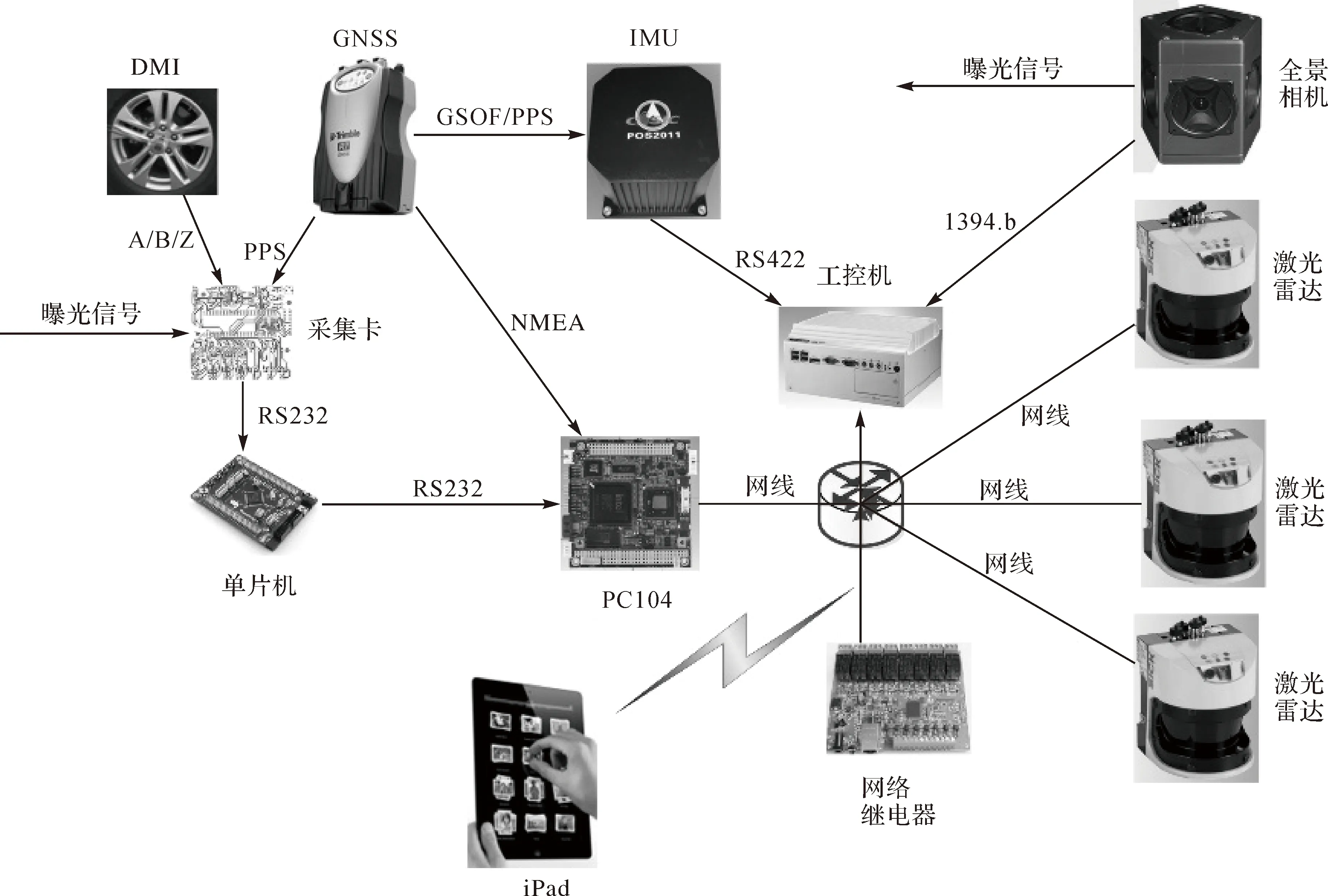
图1 系统总线示意图
1.1.3 结构件设计
GNSS、IMU、LiDAR、全景相机这几个传感器必须安装在一个刚性平台上,才能够保证设备在整体移动过程中不出现传感器之间的相对位移,从而保证数据精度。本项目采用了自主专利设计的结构件设计,硬件系统实物图如图2所示。
1.2 系统精度提升
1.2.1 理论模型
整个系统的测量基础是要生成带世界坐标的点云,需要将每个激光点赋予正确的世界坐标。激光雷达(激光扫描仪)获取的原始点坐标,来源于激光雷达设备本身的极坐标。理论上,把激光扫描仪设备坐标系下的坐标转换到世界坐标系下需要进行两次旋转与平移转换。
第一次转换:把激光扫描仪坐标系转换到POS坐标系(平台坐标系),即
(1)

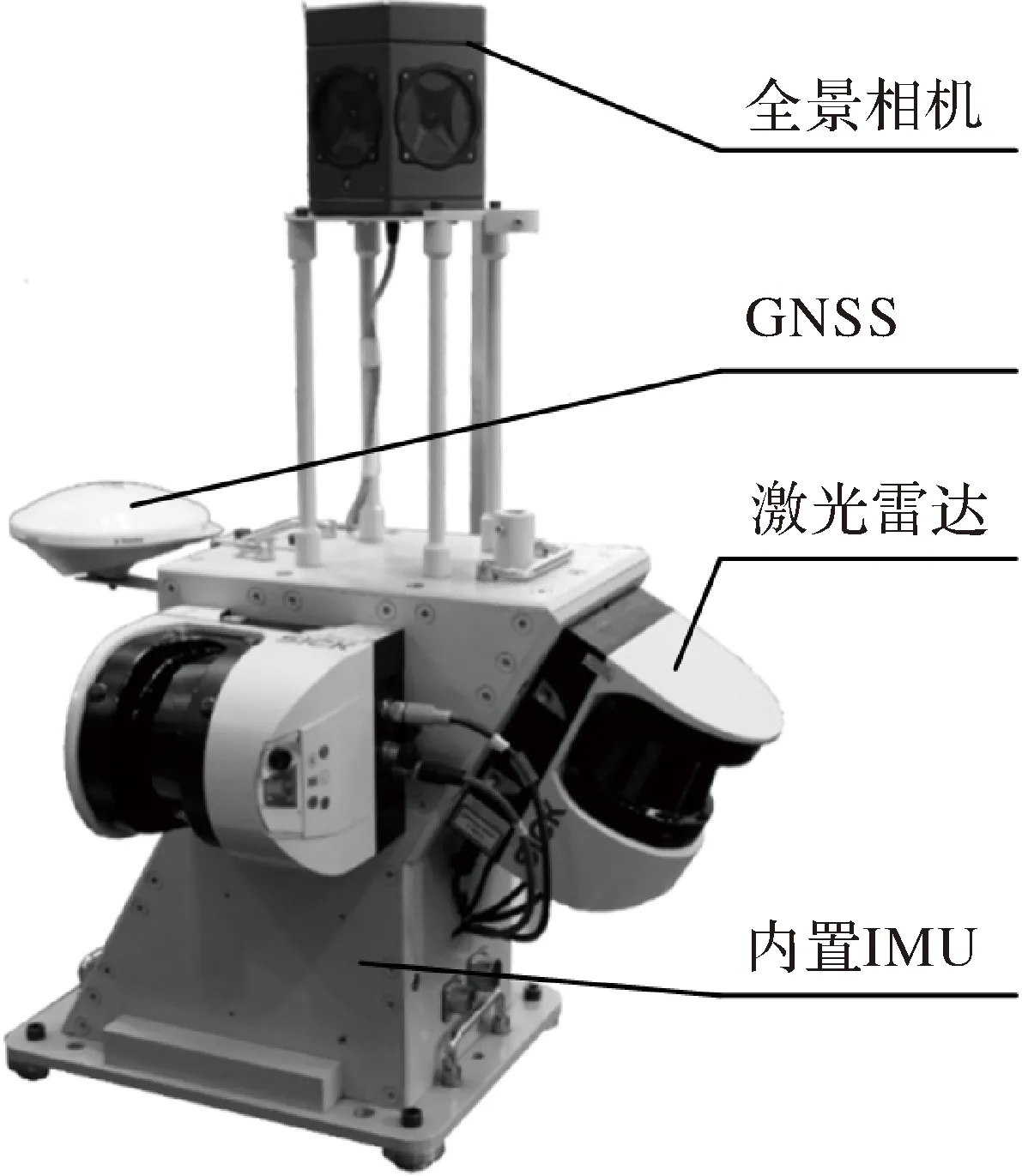
图2 硬件系统实物图
第二次转换:把POS坐标系(平台坐标系)下的坐标转换到世界坐标系下,即
(2)

合并式(1)和式(2),得到扫描仪坐标系到世界坐标系的转换公式为
(3)
1.2.2 点云误差分析
首先,点云原始数据与POS数据通过时间进行耦合,因此时间同步的精度直接影响点云成果的坐标精度,这点已经由时间同步器加以保证。然后,设备参数是激光扫描仪设备坐标系相对于平台坐标系的3个旋转分类与3个位移分类组成,也是影响精度的重要方面,设备参数通过系统标定来获取。最后,激光扫描仪的扫描平面并非理想的平面,实际上是一个扫描圆锥面,需要通过标定获取其锥扫角;同时,激光扫描仪的测距精度也需要补偿,需要进行测距校检。
1.2.3 系统整体标定
1.2.4 激光扫描仪的标定
激光雷达的测距通过六段法进行校检,此处不再赘述。激光雷达的锥扫角对精度影响较大,通过图3所示的方法进行标定。通过在激光雷达左右两端相同距离处,左右移动反射靶标,找到激光光斑的左右边缘,进而得到激光光斑中心,获得左右两个激光光斑中心,测量激光扫描仪中心到激光光斑中心连线的距离,进而求得锥扫角。
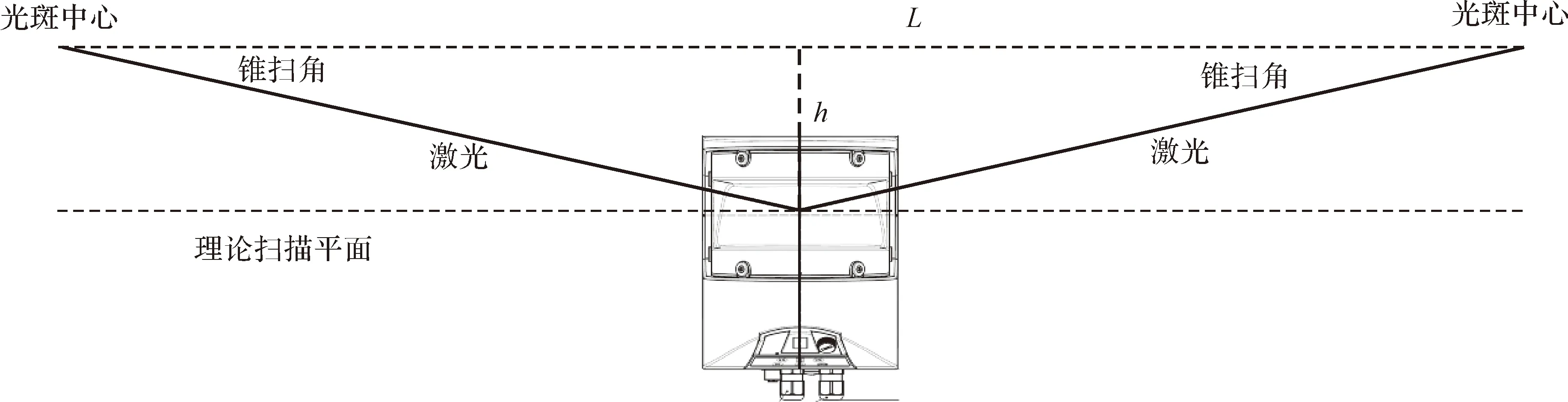
图3 激光雷达锥扫角标定示意图
1.3 全景与点云耦合生成
全景影像和激光点云是分别获取的,为了更好地支持数据应用,需将两者进行精密匹配融合,在耦合的基础上生产真彩色点云。本文提出的全景与点云耦合生成技术如图4所示,主要包含4个步骤:
(1) POS解算。在POS解算软件中,输入基站和移动站的RINEX文件,进行差分处理,得到车辆行进的轨迹数据。然后导入IMU与里程计数据,进行卡尔曼滤波,进而获得POS数据。
(2) 把点云原始数据、设备标定参数与POS数据进行融合处理,通过原始点云的时间标记查找该点的POS数据,然后根据理论公式计算该点在世界坐标系中的坐标。
(3) 通过全景影像拼接、颜色后处理后得到全景图片数据。同时根据全景相机的设备参数和该帧图像的采集时间与POS进行融合,计算该帧全景的POS信息,最终得到带POS的全景影像。
(4) 把全景数据与点云数据进行耦合,其原理就是把点坐标转换到全景坐标系中,进而获取该点相对于的全景图片中的像素坐标,取得点的RGB值,生成真彩色点云。
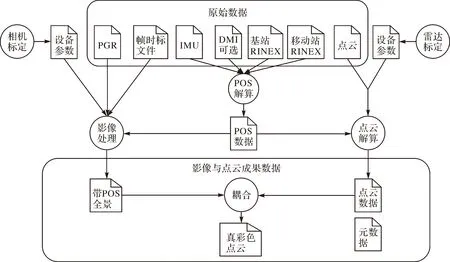
图4 全景与点云耦合生成流程
1.4 全景点云应用
图5是对全景点云两种成果深入应用的技术体系图。通过点云栅格化技术,对真彩色点云进行过滤、投影、栅格化等步骤,可以获得各种全新的数据形式。这些栅格数据形式把海量点云栅格化,便于网络环境下的点云发布及应用。同时,对点云进行分类与要素化,可自动获得行道树、路沿、路面标志线、路灯、电杆等要素。另外,将点云直接用于网络发布,可部分替代三维建模。将点云与全景结合,可发布基于景深图的可量测全景影像。
1.4.1 基于景深图的可量测实景影像
全景影像又称为街景或街景影像,目前,腾讯街景、百度街景提供的街景服务已被广泛认可。根据全景图片中心坐标查找相应范围内的激光点云,按照球面投影的要求投影到全景影像中,并计算出全景中心点到各点云的距离,给全景影像中像素点的值赋上距离值即景深信息,从而获得全景景深图。结合景深图和获取的全景影像,可生产高测量精度的可量测实景影像,支持长度、角度、距离、面积等空间度量值的实时计算,如图6所示。

图5 成果数据应用技术体系
1.4.2 基于点云的鸟瞰实景影像数据
普通街景视点的高度只有2 m左右,本文提出使用点云数据进行球面投影的方法,可生成任意高度视点的全景图像。这种数据成果形式,弥补了街景影像视点固定的不足,并且把海量点云栅格化为图片文件,便于点云数据的网络发布,如图7所示。

图6 可量测全景影像

图7 鸟瞰全景影像
1.4.3 基于浏览器的海量点云发布
利用本移动测量系统,可快速生产海量点云数据成果,如何通过网络快速发布海量点云,使用者如何快速浏览点云数据,此类关于海量点云的网络应用是一个行业难题。本文对点云进行多层级索引建立,将海量点云进行分块及八叉树分割,最终将海量点云按空间索引分割形成小文件。依托HTML5的WebGL技术,在网页浏览器中快速下载含有LOD的海量点云数据,利用显卡加速,实现了网络条件下的海量点快速云发布及三维可视化,如图8所示。

图8 基于网络浏览器的海量点云可视化
2 应用案例
本文移动测量系统具有采集快速、成果形式丰富、测量精度高的特点,在道路测图中具有明显的优势。特别是在道路改扩建补充测量项目中,道路车流量大、车速快,采用传统测绘方式,具有极大的安全风险,如果采用移动测量系统,即可在不阻断交通的前提下进行安全、快速的外业数据采集。因此,将本文移动测量系统应用于重庆渝武高速公路扩能改造工程快速移动测量项目中。
2.1 项目概况
渝武高速公路扩能改造工程全长10 km,双向4车道,设计时速80 km。该工程位于运营饱和的道路上,线路长、车流大、车速快,测量安全隐患较大;同时,设计要求测量精度高、工期短,需在不中断交通的前提下安全施工,快速、及时提供高质量和高精度的成果资料,项目难度较大。
2.2 实施概况
2.2.1 快速数据获取
硬件系统安装在采集车辆上,以30~60 km/h的速度采集道路周边的现势数据。采集工作外业持续2 h,内业处理2 h,较传统作业方式效率提升10倍。同时,车载全过程的自动化,将测量作业人员从较危险的工作环境中解脱出来。
2.2.2 生产成果数据
数据成果与内容丰富,宏观与微观信息并存。本项目形成的主要成果包括线路带状地形图、纵横断面图、桥涵工点图、跨越地铁隧道图、实景三维,更重要的是还包括全线激光点云数据和影像数据。带状点云数据以三维的形式给人整体宏观的视觉感受,海量的点云与实景影像直观展示微地形与微地貌,信息量大。基于点云和影像,获得了可量测实景影像数据,并据此进一步生成了道路两边的1∶500地形图及纵横断面图。部分成果展现新形式如图9和图10所示。
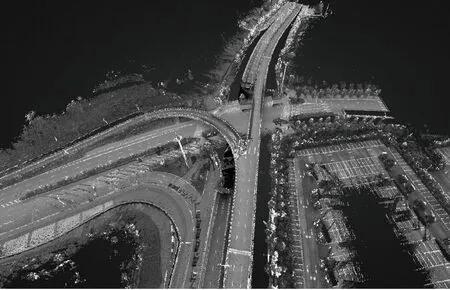
图9 真彩色点云成果
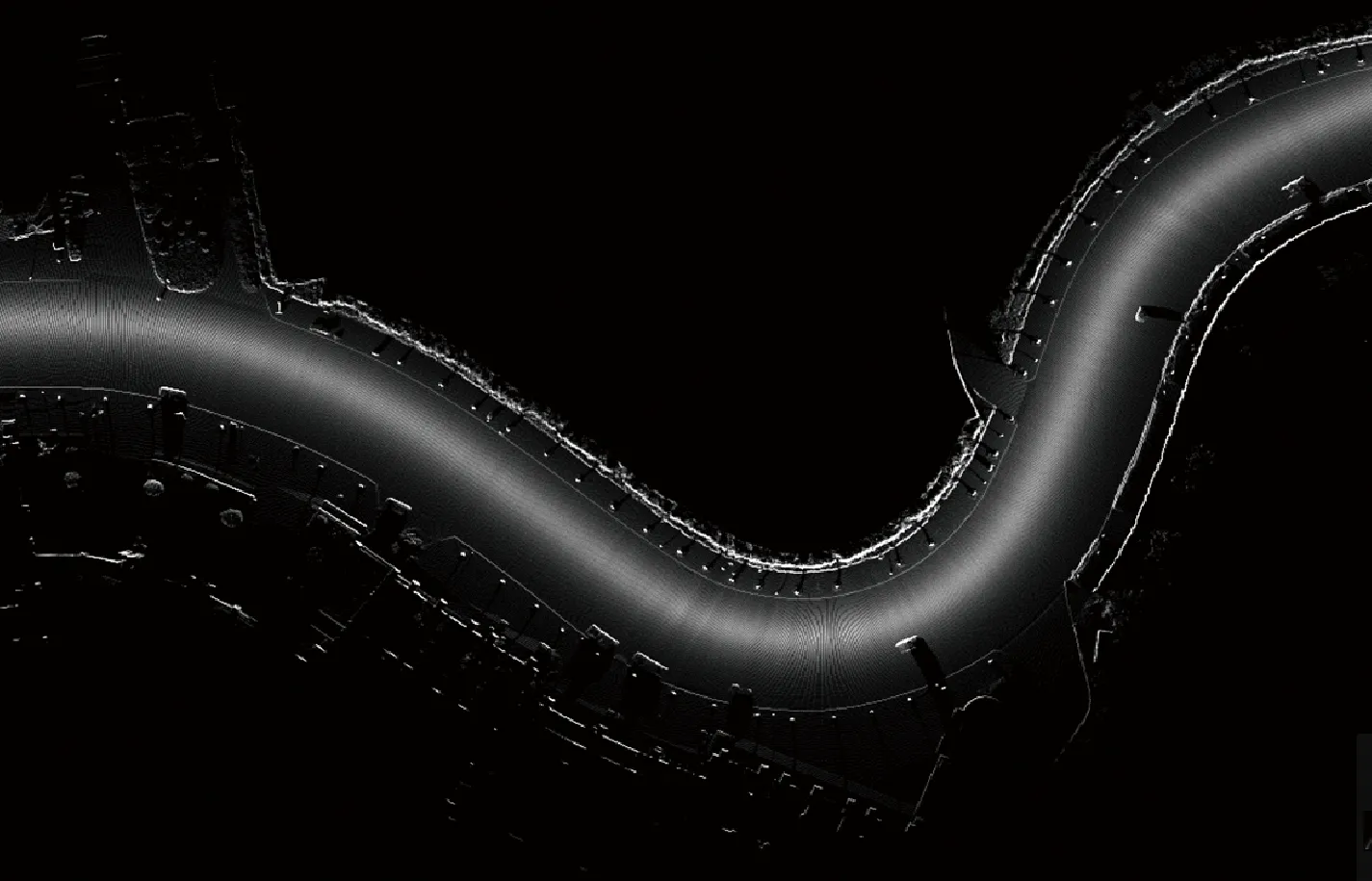
图10 点云正投影影像
2.2.3 实景快速量测
在实景中进行测量是本项目的一大特点,可量测实景影像以海量的高精度点云数据为依托,以点云数据生成的与全景影像匹配的景深图作为测量的基础,为实景提供像素级别的景深信息,两者叠加完成测量功能,实现地面相对高智能测量、点线面的测量、立面矩形标绘、模型放置等特色功能。图11为基于可量测实景影像的隧道拱高快速测量。
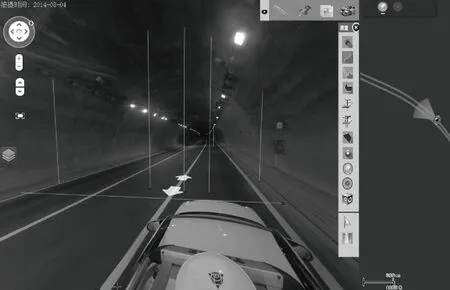
图11 隧道拱高快速测量
2.3 取得成效
本案例完成了项目设计内容及应用需求,形成的各种成果资料精度高、完整美观,达到了项目预期目标,赢得了业主好评,取得了显著的效益。项目实施过程中加强了对自然环境的保护,先进的技术手段和作业模式无需阻断交通,避免了对公众出行的影响,做到了安全文明生产,为社会和谐、百姓满意创造了条件。将本文移动测量系统应用到实际工程中,将传统测绘的生产效率提升数倍,大大减少了人力投入及项目工期,具有很好的推广价值。
3 总结与展望
本项目研究了车载全景激光耦合式移动测量系统软硬件研制的关键技术,具备了系统整体集成及研发能力。本文研发的移动测量系统,经国家光电测距仪检测中心评测,表明其具备了厘米级的测量精度;同时,系统还具有安装简便、采集快速、处理高效、成果丰富的特点,配备的软件系统,也提供了可量测实景影像、基于真彩色点云的鸟瞰全景影像、2.5维倾斜投影影像等特有的成果形式,支持基于网页浏览器的海量点云网络发布,在市政设施普查、高速路资产调查、高速路改扩建、街景数据生产等多个领域得以广泛应用。系统的成功研制,也进一步推动了中国民族品牌测绘装备的发展。
[1] 魏冠楠,石若明,郭明,等.基于车载移动测量系统的空间数据采集与预处理[J].建筑工程技术与设计,2015(32):1624-1624.
[2] 麦照秋,陈雨,郑祎,等.IP-S2移动测量系统在高速公路测量中的应用[J].测绘通报,2010(12):23-26.
[3] 闫兆进,刘如飞,侯海龙,等.面向移动测量系统的城市部件采集快速入库技术[J].测绘与空间地理信息,2016,39(8):63-65.
[4] 余建伟,刘守军.中海达船载水上水下一体化三维移动测量系统[J].测绘通报,2013(7):119-120.
[5] 张正鹏,江万寿,张靖. 自适应运动结构特征的车载全景序列影像匹配方法[J]. 测绘学报,2015,44(10):1132-1141.
[6] 徐工,程效军.移动测量系统点云精度评定及应用分析[J].工程勘察,2013,41(9):42-46.
[7] 张智勇.全景移动测量系统及其应用前景展望[J].测绘通报,2014(3):79-81.
[8] 丁安民,陈芳,张合兵,等.车载移动测量系统在大比例尺测图中的应用[J].河南理工大学学报(自然科学版),2011,30(2):160-163.
[9] 向泽君,罗再谦,汪明,等.连续实景影像在“白改黑”工程测量上的应用研究[J].测绘通报,2011(9):42-44,69.
[10] 朱圣,罗再谦,龙川,等.数字全景地图技术及在规划管理中应用的研究[J].城市勘测,2012(1):37-41.
[11] 向泽君,罗再谦,李波,等.基于连续全景影像航向与俯仰角速度的计算与应用[J].测绘通报,2012(9):48-50,54.
[12] 卢秀山,谢欣鹏,刘如飞. 轻便型移动测量系统在乡村地形测量中的应用[J]. 测绘科学,2016,41(10):149-152.
[13] 闫兆进,刘如飞,侯海龙. 面向移动测量系统的城市部件采集快速入库技术[J]. 测绘与空间地理信息,2016,39(8):63-65.
[14] 韩尚. 车载LiDAR用于轨道线带状图测量的高程精度分析[J]. 测绘通报,2016(3):70-72.
[15] 张婕,龙川,殷飞,等.基于粒子群算法的地面移动测量平台系统标定方法研究[J].城市勘测,2015(1):97-100.
DevelopmentandApplicationofVehicleMobileMappingSystem
MING Jing1,2, XIANG Zejun1,2, LONG Chuan2,3, LÜ Nan2,3
(1. Chongqing Survey Institute, Chongqing 401121, China; 2. Chongqing Engineering Research Center of Mobile Mapping, Chongqing 401121, China; 3. Chongqing Cybercity Sci-tech Co. Ltd., Chongqing 401121, China)
P24
A
0494-0911(2017)09-0136-06
2017-01-04;
2017-03-16
住房和城乡建设部2015年科学技术项目(2015-K8-048);重庆市科委科研项目(cstc2014jcyjA90026)
明 镜(1982—),男,博士,教授级高级工程师, 主要研究方向为移动测量、勘测信息化与三维GIS。E-mail: eric107@qq.com
明镜,向泽君,龙川,等.车载移动测量系统装备研制与应用[J].测绘通报,2017(9):136-141.
10.13474/j.cnki.11-2246.2017.0303.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:18
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
家庭影院技术(2020年11期)2020-12-28 01:22:36
当代陕西(2019年14期)2019-08-26 09:42:00
英美文学研究论丛(2018年1期)2018-08-16 03:00:54
北方音乐(2017年4期)2017-05-04 03:40:09
家庭影院技术(2017年12期)2017-02-06 02:32:12
特别文摘(2016年21期)2016-12-05 17:53:36
中学数学杂志(初中版)(2016年5期)2016-11-01 09:00:33