三维激光扫描技术在地铁隧道变形监测中的应用
2017-10-13 02:28:47袁长征滕德贵刘秀涵
测绘通报 2017年9期
袁长征,滕德贵,胡 波,刘秀涵
(1. 重庆市勘测院,重庆 400020; 2. 北京麦格天渱科技发展有限公司,北京 100043)
天宝测绘解决方案专栏
三维激光扫描技术在地铁隧道变形监测中的应用
袁长征1,滕德贵1,胡 波1,刘秀涵2
(1. 重庆市勘测院,重庆 400020; 2. 北京麦格天渱科技发展有限公司,北京 100043)
针对传统隧道监测手段工作效率低、数据不全面、自动化程度低等缺陷,将三维激光扫描技术引入地铁隧道变形监测中,详细介绍其作业流程,并以实际工程为例进行数据采集和处理分析。试验结果表明了该方法在隧道变形监测中的可行性和优越性。
三维激光扫描;隧道;变形监测;点云;断面
地铁隧道在建设及运营过程中由于土体扰动、周边工程施工及建构筑物负载等原因,其结构可能产生纵向及横向变形,超过一定程度的变形会危害隧道安全,影响地铁的正常运营,因此隧道结构变形监测是地铁隧道安全监测工作中非常重要的环节。
三维激光扫描技术能提供视场内有效测程的一定采样密度的高精度点云数据,并构建三维模型数据场,能够全面准确地反映监测对象的细节信息,有效避免了传统变形监测手段的局部性和片面性。此外,三维激光扫描技术对作业环境的光照条件没有要求,在黑暗的隧道照样能正常工作,且数据采集效率高,5 min左右即能完成一个测站的数据采集,能很好地满足运营地铁隧道一般只能在夜间较短时间内进行作业的要求。
1 工程实例
本次选取重庆轨道交通六号线一段长约200 m的轻轨隧道进行试验,采用的仪器为Trimble TX8激光扫描仪,数据处理软件为Trimble Realworks软件。现场控制点分布及第一期扫描的测站和标靶布设方式如图1所示。
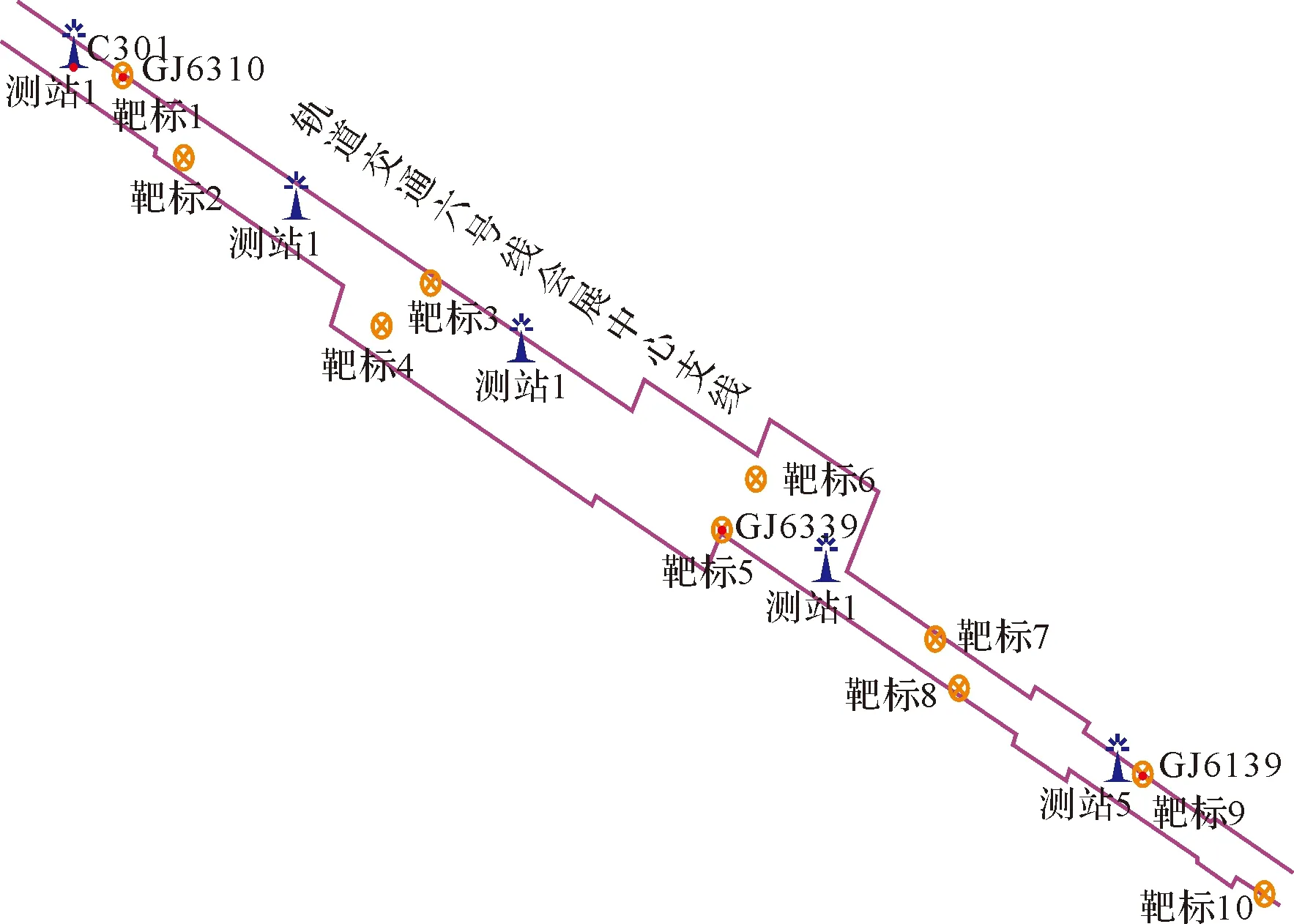
图1 测站及标靶布设图
2016年6月30日及2016年11月14日分别对该区间隧道进行了两次扫描。
1.1 数据预处理
数据采集完成后,将各站的扫描数据导入RealWorks软件,提取标靶的中心点坐标并进行配准,然后基于控制点的已知坐标将数据转换到重庆独立坐标系中。第一期扫描数据经过配准及坐标转换后形成的点云数据如图2所示。

图2 隧道点云数据
截取其中一段点云数据进行分析,首先进行点云去噪,剔除侧壁支架、管线、道床及作业人员等噪声数据,去噪前后的点云分别如图 3(a)、(b)所示。
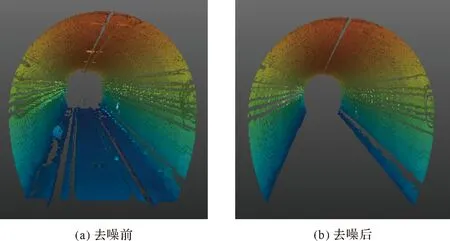
图3 隧道试验区间点云数据
1.2 精度分析
为了分析三维激光扫描仪的测量精度,在隧道内选取两个断面布设平面反射标靶,用三维激光扫描仪对各标靶进行扫描并提取中心点坐标,同时采用测角精度为0.5″、测距精度为0.6 mm+1×10-6D的高精度全站仪测量各标靶的中心点坐标,两者的测量结果见表1。
从表1可以看出,三维激光扫描仪获取的坐标与全站仪测量坐标的差值最大不超过4 mm,经计算得到水平点位中误差σ0=±0.56 mm、高程中误差σz=2.45 mm,满足《城市轨道交通工程测量规范》中变形监测Ⅱ级所要求的±3 mm及±5 mm[13],表明此款三维激光扫描仪的测量精度能够满足隧道结构变形监测的要求。
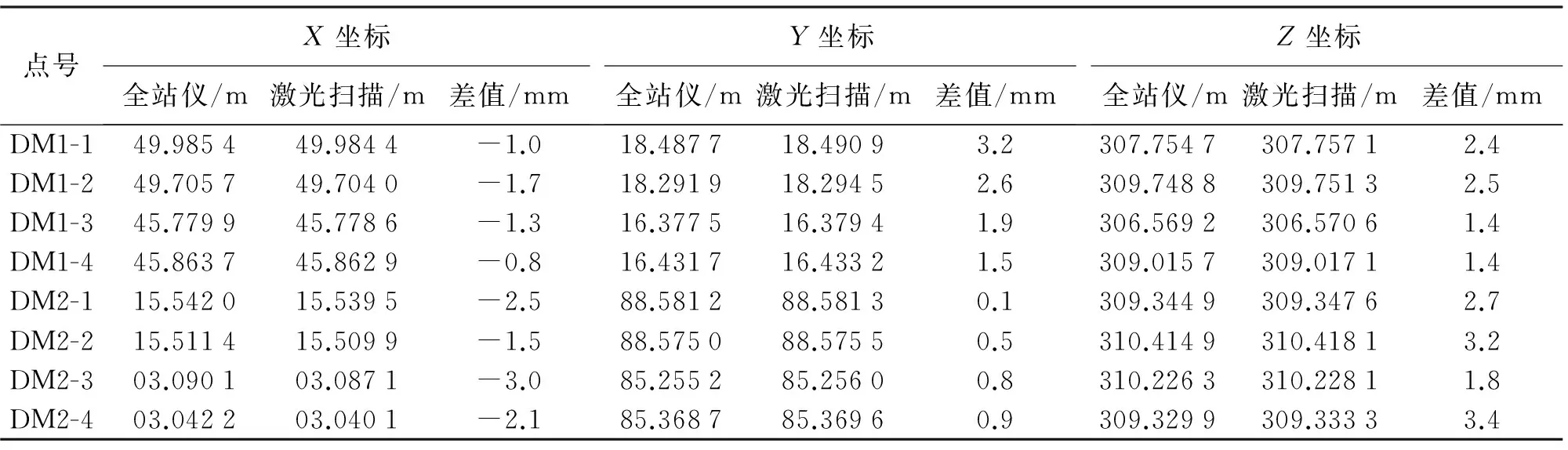
表1 标靶坐标对比
注:X、Y坐标均省略前3位数字。
1.3 断面提取及变形分析
三维激光扫描的点云包含了隧道结构表面的坐标信息,从多期扫描数据中提取相同位置的断面曲线进行对比,可分析隧道的变形情况。首先在RealWorks处理软件中基于点云数据生成隧道结构的三角网模型,如图 4所示。
图4 隧道试验区段三角网
提取断面时,设置起止位置及断面间距,软件即可自动生成相应的断面曲线及断面中心点坐标、法线等属性信息。在试验区段以1 m为间距提取32个断面,如图 5所示。

图5 试验区段断面曲线
断面曲线提取完成后,通过断面分析器可对同一位置的两期断面数据进行对比,其中一个断面的分析结果如图 6所示。从图中可以看出,两期断面数据的差值大多在2 mm以内,最大不超过4 mm且断面各位置的差值呈正态分布,表明该断面没有发生明显变形。为了对隧道的整体变形趋势进行分析,提取各个断面的中心点坐标并连接形成隧道结构的中轴线,通过两期中轴线数据的对比分析隧道的整体变形情况。各个断面中心点坐标在X、Y、Z3个方向上的差值如图 7所示。
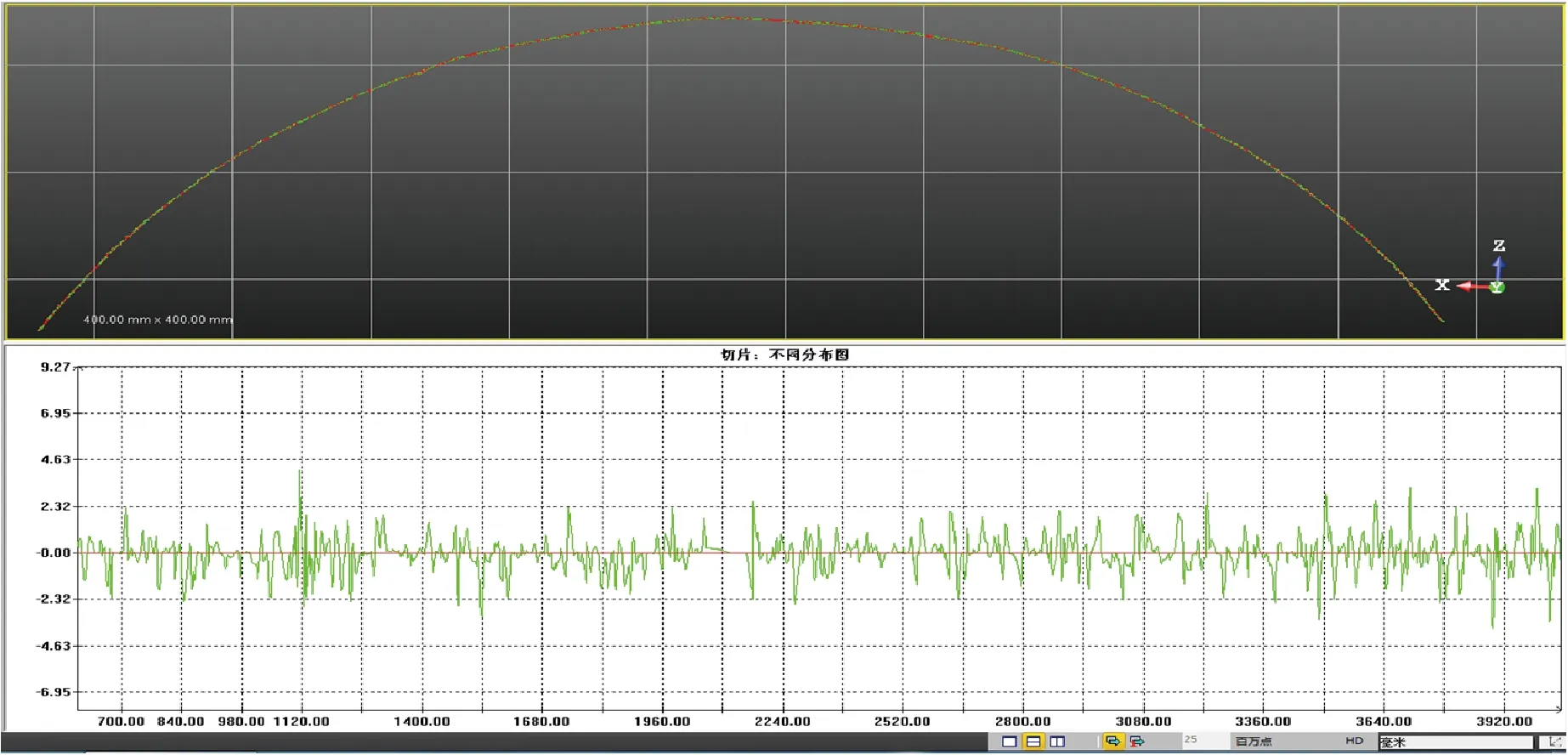
图6 断面对比分析

图7 隧道中轴线坐标偏差
从图7可以看出,基于两期扫描数据提取的隧道中轴线坐标在3个维度上的差值均在6 mm以内,并且在不同断面位置无趋势性差异,表明该隧道区间结构在整体上无明显变形,结构稳定。
2 结 语
本文在分析传统隧道结构变形监测手段缺陷及三维激光扫描技术优势的基础上,提出了三维激光扫描技术在地铁隧道安全监测中的作业流程并进行了工程实践。分析结果表明,三维激光扫描仪的测量精度能够满足隧道结构变形监测的要求,可以准确、快速获取隧道空间数据,提高了作业效率,基于断面曲线及隧道中轴线的变形分析方法能够从局部和整体两个层面反映隧道结构的变形情况,为地铁隧道结构变形监测提供了一种科学可行的解决方案。
猜你喜欢
电脑报(2020年12期)2020-06-30 19:56:42
电脑报(2019年4期)2019-09-10 07:22:44
测绘工程(2018年3期)2018-03-20 03:05:12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
少儿美术·书法版(2016年1期)2016-02-06 00:59:39
大众摄影(2015年9期)2015-09-06 17:05:41
现代营销·经营版(2015年3期)2015-04-20 06:46:58
测绘学报(2015年4期)2015-01-14 03:01:28
大地测量与地球动力学(2014年3期)2014-02-13 05:44:02
河南城建学院学报(2014年2期)2014-02-09 03:03:10