
地源热泵空调系统的控制仿真研究
2017-10-13 12:40:16曹振华
制冷与空调 2017年3期
曹振华
地源热泵空调系统的控制仿真研究
曹振华
(陕西国防工业职业技术学院建筑与热能工程学院 西安 710302)
由于地源热泵空调系统的控制系统较复杂且非线性,在运行过程中所受干扰多,并且难以建立精确的数学模型,目前多采用常规PID控制系统或相对较好一些的模糊PID控制系统,但都存在不足,很难达到其节能和舒适的作用。针对其特点提出了模糊控制和单神经元PID控制相结合的方法。并通过MATLAB仿真工具对其三种控制方法分别进行动态仿真,其结果表明该方法运用于地源热个泵空调系统中,其控制效果明显优于其它两种控制方法,大大提高了控制系统的控制品质,受外界影响较小,响应快,鲁棒性较强,节能和舒适性效果更明显。其研究结果在实际工程中具有一定的实际应用价值。
地源热泵空调系统;模糊增益单神经元PID控制;动态仿真
0 引言
随着智能建筑的大力发展,人民生活水平的提高,空调已成为现代社会中必不可少的一部分。中央空调的种类很多,其中最有发展潜力的一种空调为地源热泵空调系统。原因是其能源来源于地下并可以循环利用,不但大大的节约了能源,而且清洁无污染。然而在传统的系统设计中,地源热泵中央空调系统的各个设备都是按照最大负荷来进行设计的,各电机无论季节、昼夜或用户负荷的怎样变化都长期在工频状态下满负荷运行[1]。这种设计不能随负荷变化而调整系统功率,因此造成了较大的能源浪费。其次,地源热泵中央空调是一个非线性,大滞后,在运行过程中所受干扰多的复杂系统,对其控制比较困难,目前多采用常规PID控制系统或相对较好一些的模糊PID控制系统,但都存在不足,很难达到其节能和舒适的作用。
本文针对其特点提出了模糊控制和单神经元PID控制相结合的方法。并通过MATLAB仿真工具对其三种控制方法分别进行动态仿真,其结果表明该方法运用于地源热个泵空调系统中,其控制效果明显优于其它两种控制方法,大大提高了控制系统的控制品质,受外界影响较小,响应快,鲁棒性较强,节能和舒适性效果更明显。其研究结果在实际工程中具有一定的实际应用价值。
1 地源热泵空调系统模型的建立
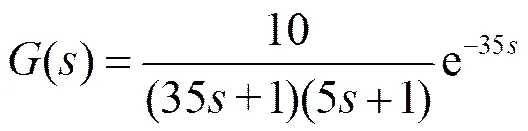
地源热泵空调系统的控制模型目前多采用低阶函数近似模拟的方法来表示,因为地源热泵空调控制系统影响因素复杂多变,与空调系统本身、外界环境及其他干扰等众多因素有关,如果都考虑其建立的模型将很复杂,很难处理计算。而采用低阶函数建立模型忽略了其它环节的滞后,并将其他输入视为干扰的情况下,则整个控制系统用一个带滞后环节的二阶简化控制模型表示[2]。经实践证明可知,用带迟延的二阶模型来近似实际控制对象可以改善模型与对象间的相位差,实际应用中完全可以满足。地源热泵空调系统的冷却水和冷冻水控制系统基本相同,因此本文在仿真中以冷冻水系统模型为例进行。
其冷冻水系统模型的传递函数:
2 地源热泵空调系统模糊神经元PID控制器的设计
2.1 单神经元PID控制器简介
常规PID控制器的参数一开始是被设定好的,因此对于地源热泵空调系统温度自动调整控制系统来说,其控制的稳定性很难保证,控制性能较差。特性。而单神经元控制的特点是具有自适应性,可以自调被控参数,对模型的不确定性和非线性不敏感,具有自学习能力、并行计算能力,可以任意逼近非线性函数的能力。其广泛应用于非线性系统领域中。为了提高常规PID控制器在控制复杂和时变系统时的性能,本文将单神经元与PID控制器相结合(即单神经元PID控制器),以期获得更满意的控制效果。基于此本文把单神经元PID控制器应用于地源热泵空调控制系统的设计中。
单神经元PID控制器的数学模型为[3]:
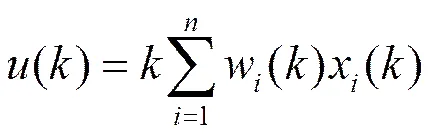
()为单神经元控制器的输出,w()(i=l,2,...)对应于x()的加权系数。
通过公式(2)可知,单神经元PID控制器是要达到较满意的控制效果,必须能够对参数进行自适应的调整,以便适应被控对象建模误差及其时变一个非线性的控制器,其控制系统结构图如图1所示。
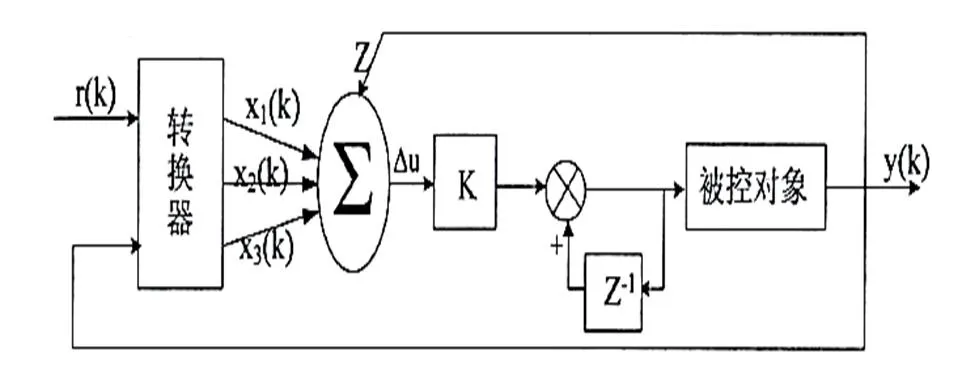
图1 单神经元PID控制器结构图
2.2 模糊增益单神经元PID控制器设计
在单神经元PID控制系统中,由于热源水泵空调系统的水系统环境随时可能发生变化,因此控制系统中增益对控制器的效果影响较大,通常情况下,值较小时,控制系统能够保持稳定,但当值太小时,控制系统反应就比较慢,控制的快速性要求就会达不到;当值较大时,快速性要求倒能满足,但会增大超调量,从而导致系统的不稳定。因此值大小的选取对控制器具有重要的作用。为使单神经元PID控制器能够对增益进行在线调整,本文使用模糊控制器在线自动调节神经元增益的大小,提出了一种基于模糊模型的增益自调整的单神经元自适应PID控制器的控制法(即模糊增益单神经元PID控制器),这样可以避免一维控制其控制的不精确性和三维控制器的复杂性,提高了计算速度。
模糊增益单神经元PID控制器结构图如图2所示。

图2 模糊增益单神经元PID控制器结构图
模糊控制能够很好的逼近非线性系统,从而建立增益自适应调整的模糊模型。在地源热泵空调控制系统中,将自调整后的增益设为()=。其原因是:在空调响应初期,一般要求空调迅速达到其设置温度要求,尽快使房间舒适,这就要求控制响应速度要高,响应速度的大小由单神经元的增益的大小决定,越大响应越快,因此一开始值应取一个较大的值,而当空调进入稳定工作状态后,为了避免控制的超调量过大,则应把值减小。当偏差增大时,值也随着增大,响应速度也会增快[4,5]。
将地源热泵空调机组回水温度与设定值的偏差和温度偏差变化率e设为输入量,输出量选取为调整系数入,模糊子集的隶属度函数采用高斯型,模糊子集,e和输出都进行如下划分:{负大,负小,零,正小,正大}={NB,NS,ZO,PS,PB},其基本论域分别为[min,max],[emin,emax]。
综合地源热泵空调系统运行过程中的各种因素的变化情况,在本设计中将回水温度误差的变化范围设计为[-6,6],误差变化率的范围为[-16,16];论域都选择为[-5,5],输出调整系数的范围为[0.80,1.10]。
根据以上分析可知,单神经元增益的变化对该空调控制系统控制性能影响非常大,根据两者之间的关系,我们可知,当回水温度的偏差的变化率和偏差值增大时,增益也会随着增大;当回水温度的偏差的变化率和偏差值减小时,增益也会随着减小。因此为了获得最佳的控制效果,应根据系统变化,不断地调整模糊规则表以达到最合适最稳定的回水温度。特别需要说明的是,因为输入的两个信号影响力度不同,其回水温度变化率的影响要比它的误差大小的影响迟钝一些,所以设计的模糊规则并不对称。经过进行不断地调整,本文总结出了其模糊控制规表如表1所示。
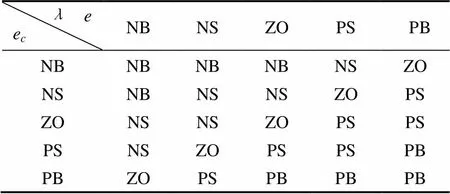
表1 模糊控制规则表
上面的规则表可写成条件句语句,即If=NB ande=NB then=NB,If=NB ande=ZO then=NS等,总共25条规则。本文模糊控制器釆用重心法解模糊,计算公式为:
式中,为反模糊化后输出量,为输出变量,为模糊集隶属函数。
3 地源热泵空调控制系统的仿真结构图及仿真结果
3.1 仿真参数的调整和选取方法
本文虽然将以往的控制器改进为模糊增益神经元PID控制器,但是可调参数η,η,η和初始加权系数1(0),2(0),3(0)的选取将会直接影响其控制效果,因此控制参数的选择必须慎重考虑。
首先,η,η,η为比例、积分、微分的学习速率,应选择不同的数值,因为它们主要是为了对各个权系数进行不同的调节。本文采用教师信号的学习算法,因此设置η,η,η的值可以根据PID控制时的整定参数,然后为了满足其控制要求再根据控制效果进行一些较小的调整。由于风机水泵的控制在地源热泵空调系统中是分别进行的,因此对于时延特别大的系统,为了减小系统的超调量,η,η在选取时应稍微大一些[5]。
其次,1(0),2(0),3(0)的选取值对控制系统的输出结果影响较大,如果选取不当,可能会导致地源热泵空调控制系统的不稳定现象。由于初始加权系数值1,2,3分别相当于比例、积分、微分系数,因此可以将PID的参数初值作为初始权值。
3.2 三种控制系统仿真模型的建立
仿真模型建立的方法是:首先将MATLAB/ Simulink模块库中相应的模块调出并拖入其模型界面内,其次设置各模块之间的对应参数,最后将各模块之间对应的用线条连接好。对模糊控制的控制器来说,建立仿真模型的方法是:首先编好该控制器对应的S-Function函数,然后封装,这样MATLAB/Simulink仿真模型就建立好了[6]。
(1)单神晶元PID控制仿真模型如图3所示。
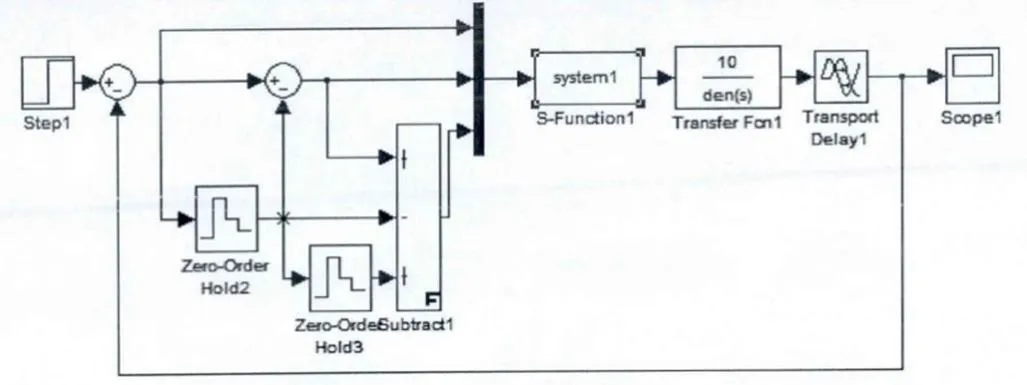
图3 单神经元PID控制仿真模型
(2)模糊控制和常规PID控制相结合,即模糊PID控制仿真模型如图4所示[7]。
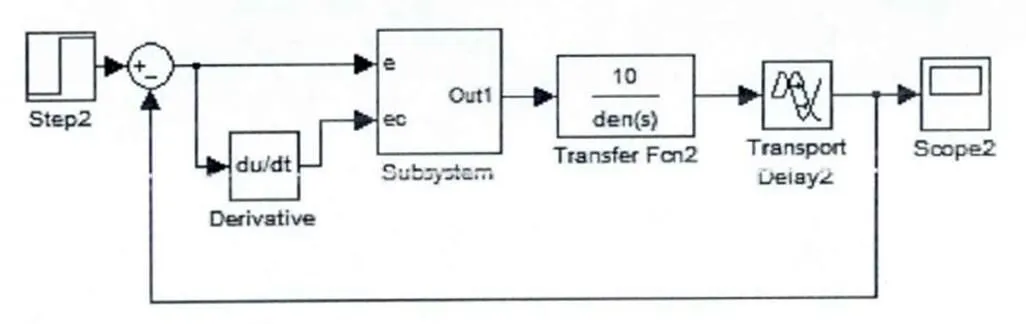
图4 模糊PID控制仿真模型
(3)模糊控制和单神经元PID控制相结合,即本文采用的方法模糊增益单神经元PID控制仿真模型如图5所示[8]。
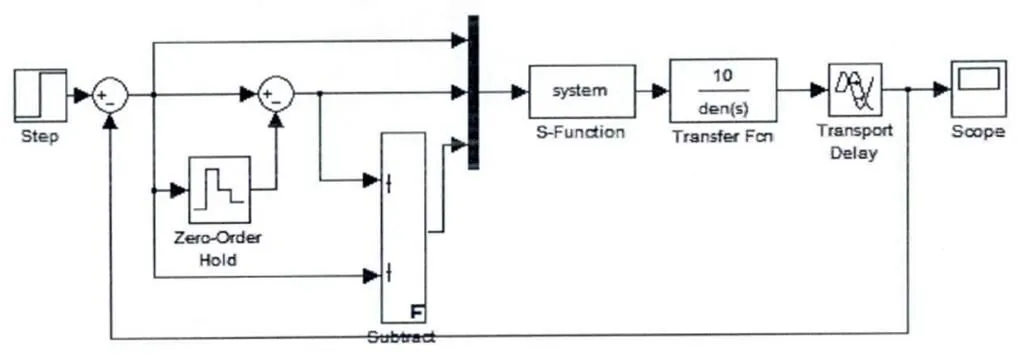
图5 模糊增益单神经元PID控制仿真模型
3.3 三种控制系统仿真结果
为了正确评价被控对象的动静态特性,在仿真中,典型的做法是给被控对象施加一个阶跃输入信号,从而观察被控对象的输出响应曲线。另外为了验证控制器的抗干扰能力,本文在600s时加了干扰进行仿真分析[9]。
为了能够更加清楚明了的验证本文提出的模糊增益单神经元PID控制系统的优势和正确性,本文将传统的单神经元PID控制系统和模糊PID控制系统三种系统同时进行仿真模拟,从而发现三种控制系统的优缺点。
(1)三种控制系统的阶跃响应仿真结果图如图6所示。
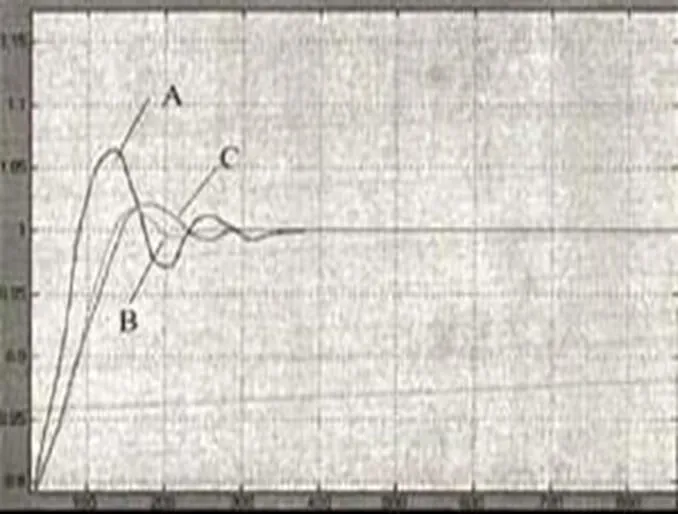
图6 三种控制系统的阶跃响应仿真结果图
说明:A线——单神经元PID控制响应曲线;B线——模糊增益单神经元PID的控制响应曲线;C线——模糊PID控制的响应曲线。
(2)三种控制系统的加干扰仿真结果图如图7所示。
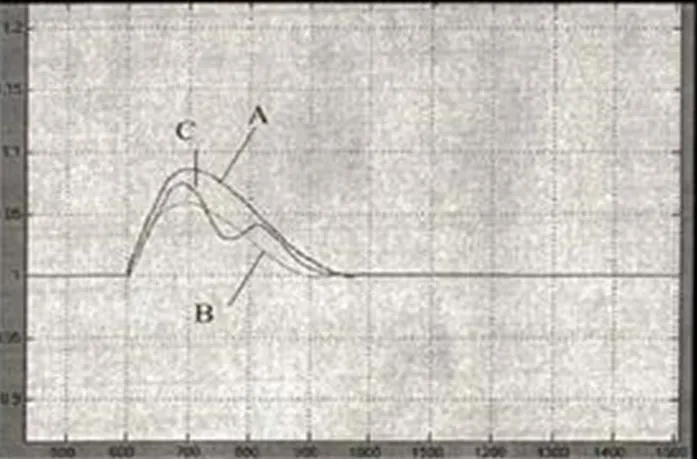
图7 三种控制系统的加干扰仿真结果图
4 仿真结果分析及结论
从仿真结果图6中可以发现,模糊增益单神经元PID控制器所产生的超调量最小,过度时间最短,其远小于常规单神经元PID控制器,比模糊PID控制器的过度时间也短,可见本文所研究的控制系统的控制品质比其他两种控制系统的控制品质要更好。且其曲线变化也较平滑,稳定性也较好。
图7中分别对传统的单神经元PID控制器、模糊PID控制器和模糊增益自调整单神经元PID控制器在600s时加了一个大小相同的扰动,从仿真结果图可以发现,常规单神经元PID控制曲线在扰动信号作用下产生的超调量最大,模糊PID控制曲线产生了比较明显的波动,而模糊增益单神经元PID控制虽然在响应时间上差别不大,但产生的超调量最小,系统鲁棒性最强,相对而言,其对扰动信号的适应能力要略强一些。因此,在地源热泵空调控制系统中选用模糊増益单神经元PID控制器要比常规单神经元PID控制器和模糊PID控制器都要好。
综上所述可见,在地源热泵中央空调的控制系统中选用模糊增益单神经元PID控制方法要优于目前普遍采用的常规PID控制和模糊增益PID控制的方法,其研究结果希望能为广大空调设计和空调研究人员在地源热泵中央空调系统控制问题上的研究提供一定的借鉴和帮助作用。
[1] 李昆,刁乃仁,王金标,等.地源热泵技术在北方既有小区节能改造中的应用[J].制冷与空调,2014,(6):649-654.
[2] 郭彬,刘林,曹耕硕,等.地源热泵热响应试验与研究[J].制冷与空调,2015,(2):232-236.
[3] 李文涛.神经PID在地源热泵空调系统中的应用[J].工业控制计算机,2012,25(9):52-53.
[4] 郭昌,高清维,崔桂梅.模糊PID控制算法在变频调速中的新应用[J].电机与应用控制,2011,38(8):19-22.
[5] 廖芳芳,肖建.基于BP神经网络PID参数自整定的研究[J].系统仿真学报,2005,17(7):1711-1713.
[6] 姚俊.Simulink建模与仿真[M].西安:西安电子科技大学出版社,2002,(7):33-39.
[7] 黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2001.
[8] 赵娜.基于HVAC冷冻水系统的模糊控制研究[J].科学技术与工程,2008,12(11):3187-3190.
[9] 高翔,吴刚,陈金增.制冷空调系统的模糊控制与模拟仿真[J].海军工程学报,1998,(3):62-66.
Control Simulation of Ground Source Heat Pump Air Conditioning System
Cao Zhenhua
( Department Architecture and Thermal Engineering, Shaanxi Institute of Technology, Xi’an, 710302 )
Suffered interference and more during operation due to variable air volume (VAV) central air conditioning system control system more complex, and the mathematical model is difficult to accurately determine, so a simple PID control of the system difficult to achieve the role of energy efficiency and comfort. According to their characteristics with the two combining for the air conditioning control system, fuzzy control and PID control and MATLAB simulation tool for the two control methods for dynamic simulation, the results show that the fuzzy adaptive tuning PID the control has a faster dynamic response than the PID control, smaller overshoot, is robust; the size of its air supply air supply closer to the actual load, energy efficiency and comfort effect. Their research results in the actual project has a certain reference value.
Ground source heat pump air conditioning system; fuzzy gain single neuron PID control; dynamic simulation
1671-6612(2017)03-313-04
TU831.6
A
陕西国防工业职业技术学院自然科学类研究项目《地源热泵空调控制系统的设计与研究》(项目编号:Gfy17-14)
曹振华(1978.02-),男,研究生,副教授,E-mail:106741438@qq.com
2016-03-17
猜你喜欢
建材发展导向(2022年3期)2022-04-19 12:51:08
煤气与热力(2021年9期)2021-11-06 05:22:54
煤气与热力(2021年6期)2021-07-28 07:21:18
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
中国资源综合利用(2016年9期)2016-01-22 08:35:24
