
基于滑模控制理论的MMC-MTDC自适应下垂控制策略
2017-10-12 03:47宋平岗周振邦
电源学报 2017年5期
宋平岗,董 辉,刘 武,周振邦
(华东交通大学电气与自动化工程学院,南昌 330013)
基于滑模控制理论的MMC-MTDC自适应下垂控制策略
宋平岗,董 辉,刘 武,周振邦
(华东交通大学电气与自动化工程学院,南昌 330013)
传统MMC-MTDC下垂控制策略中常采用PI双闭环控制,系统的暂态特性较差。为提高系统响应速度和稳定性,提出基于滑模理论的自适应下垂控制策略。控制器采用双闭环级联控制结构,其中内环控制器根据滑模变结构在dq坐标系下对MMC非线性数学模型进行建模,设计积分滑模面和降低系统抖振的指数趋近律控制器;外环控制器根据MMC实时容量与功率参考指令的比较设计自适应下垂控制器,使MMC根据实际情况“量力而行”。最后在PSCAD/EMTDC中建立4端MTDC模型,在2种工况下进行验证,结果表明所提控制策略可以有效避免系统暂态时裕度较小的MMC满载,还具有较高的动态性能和响应速度。
模块化多电平换流器;多端直流输电系统;自适应下垂控制;潮流分配;滑模控制
Abstract:PI double closed loop control is often used in traditional MMC-MTDC droop control strategy,and the transient characteristics of the system are poor.In order to improve the response speed and stability of the system,in this paper an adaptive droop control strategy based on sliding mode theory is proposed.The controller adopts double closed loop cascade control structure,the inner loop controller is used to model the MMC nonlinear mathematical model in the dq coordinate system according to the sliding mode variable structure,the integral sliding surface and the exponential reaching law controller are designed to reduce the chattering of the system.The outer loop controller is designed according to the comparison of MMC real time capacity and power reference instruction to make the MMC run according to the actual situation.A simulation model of MMC-MTDC including four stations is established in PSCAD/EMTDC.The simulation is set under two conditions,the results show that the proposed control strategy can effectively avoid the full load margin of the system when the MMC is small,and the system also has high dynamic performance and response speed.
Keywords:modular multilevel converter(MMC);multi-terminal DC transmission system;adaptive droop control;power flow distribution;sliding mode control
电力电子技术的飞速发展使大容量远距离输电和能源短缺等问题有可能得到解决,也促进对柔性直流输电技术的广泛研究[1]。模块化多电平换流器MMC(modular multilevel converter)具有高度模块化结构、对开关器件要求低和具有直流故障穿越能力等优点[2,3],使其广泛应用于高压大功率场合。
多端直流输电MTDC(multi-terminal DC transmission system)相比两端输电系统可实现多时间尺度的新能源并网和城市供电系统。MMC-MTDC利用直流电网将多个整流和逆变换流站进行连接,实现了多电源供电和多落点受电[4],但是其控制策略也更加复杂。
多端直流输电系统的核心是保证直流侧电压稳定和MMC的稳定运行[5,6]。当系统潮流翻转或MMC故障退出运行后系统出现功率偏差,直流电压易出现超调波动或者响应速度慢的问题,容量较小的MMC可能承担功率偏差过大以致满载运行。文献[7]提出N-1法则,利用MMC内特性建立P-U2特性曲线,引入公共直流参考电压,根据MMC容量调节下垂系数,但暂态工况下电压有较大波动,响应速度慢;文献[8]提出一种电压下垂跟随控制策略,利用非线性序列二次规划法求解目标函数,实现潮流的最优分配和电压的稳定控制,但只是对系统功率改变进行验证,没有考虑系统故障情况;文献[9]针对电网不平衡故障提出直接功率补偿策略,在αβ坐标系下直接建立功率与电压的联系并对功率参考指令进行补偿,实现稳定直流电压的目标。文献[10]对系统潮流进行分析,在考虑直流线路阻抗的情况下将下垂系数与潮流分配进行结合,使系统出现功率偏差时达到最优潮流分配的目的,但没有对N-1法则进行验证;文献[11]基于滑模变结构针对Vienna整流器提出非线性双闭环控制策略,其内环采用直接功率控制、外环采用电压平方反馈的新型控制策略。另外研究表明,系统暂态工况下PI控制环系统响应速度慢,定斜率下垂控制无法根据MMC容量来实时调节各自所需要承担的功率偏差。
为此,本文基于滑模控制理论[12]设计自适应下垂控制器。该控制器采用级联双闭环控制策略,其中内环根据滑模控制理论对MMC内特性进行建模,采用积分滑模面和可降低系统抖振的指数趋近律控制器;外环采用功率电压环,根据瞬时功率与功率参考指令的比较,实时调节下垂曲线斜率,达到各个MMC“量力而行”的目的。最后在PSCAD/ EMTDC中建立4端MTDC模型,对比两种控制方式,验证在稳态与暂态工况下的潮流分配能力和相应响应特性。
1 MMC-MTDC系统
1.1 MMC拓扑结构
图1为MMC换流站交流侧等效模型。图中,Us为电网电压;Rs、Ls为交流侧等效电阻和电感;P、Q为流过MMC有功、无功功率,图中所示方向为正方向。Udc、Idc为直流侧电压、电流。
MMC交流特性方程[13,14]为

式中:usj为电网侧电压,j为a、b、c三相;ej为MMC内部电动势,调节MMC内部与交流侧能量;R为Rs与桥臂等效阻抗之和;L为Ls与桥臂等效感抗之和。

图1 换流站等效系统Fig.1 Equivalent system of station
将式(1)变换至dq坐标系下,即

则MMC交流侧功率可以表示为

1.2 MTDC拓扑结构
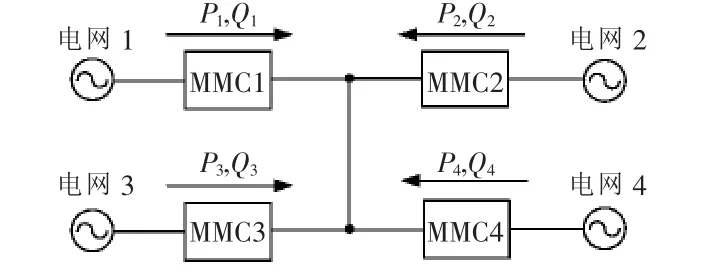
图24 端MMC-MTDC系统结构Fig.2 Topology of three-terminal MMC-MTDC
如图2所示为4端MMC-MTDC系统结构,采用并联连接方式,利用直流网络将所有换流站连接到一个中心点。该拓扑结构简单,易于扩展;直流线路短且单一;直流侧配有直流断路器,故障影响较小,恢复速度快。MMC1~MMC4均连接强电网。
2 滑模控制器设计
滑模控制是一种强鲁棒性的非线性控制方法,其动态过程是迫使系统变量根据 “参考滑动面”有目的地变化。“滑动面”可以设计成为受系统参数影响较小的运动轨迹,具有较快的响应速度和扰动不灵敏度。其应用范围已扩展到机器人[15]、同步电机[16]和大功率电力电子器件[17]等领域。滑模控制器设计主要有两个关键部分:①滑模面,使系统变量在“滑动”时有较好的系统特性;②控制率,系统从初始状态运动至滑模面,再从滑模面运动至系统稳定运行点的总时间要小。
直流电网主要研究功率与电压之间的关系,忽略MMC内部换流过程,类比两电平换流器,MMC可以等效为电流源[18],如图3所示。假设MMC每个桥臂子模块个数为N,处于开通状态的个数为N/2,则直流侧并联电容等效为:C=6C0/N,C0为单个子模块电容。由此根据图3可得

图3 MMC等效模型Fig.3 Simplified equivalent model of MMC

式中,P为流入MMC的功率。
本文不考虑MMC损耗与电感能量的储存,令P*为功率参考指令,则式(4)可以改为

由式(5)可以看出,udc与其导数处于乘积的状态。令u=u2
dc,则式(5)简化为

udc为正值,变量改变不影响系统的控制性能。
以直流侧电压稳定和功率精确控制为目标,设跟踪误差为:Δu=u*-u,ΔQ=Q*-Q,对误差进行积分,设置积分滑模面,即
式中,km、kn分别为第m、n个MMC下垂控制斜率系数,为求解m的二阶导数与n的一阶导数。将式(2)、式(3)和式(6)代入式(7)可得

进而,由式(8)可得

滑模理论在按滑模面逐渐趋近稳定点的动态过程中,频繁切换会引起系统抖振,并且由式(9)可以看出m的相对阶为2,n的相对阶为1,由此本文选用控制器结构简单且所需系统参数较少的指数趋近律控制方式,保证系统稳定,降低系统抖振。
所提控制率主要分为两个部分,采用文献[19]提出的控制率设计方法,即达到过程与滑动过程。达到过程是系统从任意状态快速达到滑动面,滑动过程使系统迅速按照滑动面运行至稳定运行点,描述为

式中:ex为达到过程;ey为滑动过程。
用饱和函数替代指数趋近律控制中的符号函数来降低系统高频抖振。设计ex为

式中:a、b、c、d为常数。a、c决定了趋近过程中的快慢,a、c一般取较大值,达到过程速度更快,有效增加系统动态响应特性;b、d决定了克服扰动的能力,b、d取值较小,可以减小滑动过程中不必要的抖振问题。sat(x)为饱和函数,表示为

式中,λ为误差带宽。
令m"=n'=0,则式(8)表示为

通过李雅普夫稳定性判据来验证本文所提控制策略的稳定性和收敛性。构造函数为

可以看出,V≥0恒成立。将式(7)代入式(15),求导可得
滑模面与饱和函数相乘恒为正,式(16)可以看出V恒小于0,系统可以在有限时间内到达滑模面并运行至稳定点。
3 自适应下垂控制
图4为传统下垂控制特性曲线,根据特性曲线有


图4 传统下垂控制Fig.4 Traditional droop control
式中:h为误差信号,经过PI控制器来控制isd;U*dc为电压参考值。
设系统内含有m个换流站,当系统出现故障或者根据实际情况进行功率调度时,系统内出现功率偏差ΔP。以第n个换流站为例,系统再次达到稳定后,根据下垂特性曲线可知其稳定运行从点A运行到点B,其承担功率偏差ΔPn,为

系统不平衡功率可以表示为

由此可以得出MMC(n)所分担的功率,即
由式(17)可知,下垂曲线斜率决定了MMC所分担的系统功率偏差,k越大,分担的功率越小,k越小,分担的功率越大。结合实际工况分析,当系统出现较大故障,系统功率偏差较大时,功率裕度较小的MMC采用定斜率下垂控制,很可能出现MMC满载情况,对换流站内部器件造成较大负担。为避免出现上述情况,电压外环采用自适应下垂控制。
传统下垂控制根据电压允许最大波动与MMC最大裕度来设计下垂系数,即

式中:Si为第i个MMC变流器最大容量;Umaxdc为电压允许达到的最大值。
根据瞬时功率与功率参考指令的比较来设计自适应下垂控制器,表示为

式中,α为常数。α为下垂系数对系统潮流变化的敏感程度。从式(22)可以看出,当瞬时功率大于功率参考指令时,Si-|P|为功率裕度,MMC下垂曲线斜率较大,会承担较小的系统功率偏差;当瞬时功率小于功率参考指令时,下垂曲线斜率较小,承担的系统功率偏差较大。
如图5所示基于滑模控制的双闭环自适应下垂控制结构。式(14)为基于滑模控制的内环控制,式(17)为自适应下垂控制器输出信号控制内环,式(22)根据瞬时功率自适应调节下垂曲线。

图5 自适应下垂控制结构Fig.5 Adaptive droop control diagram
4 仿真分析
为了验证本文所提基于滑模控制的自适应下垂控制策略的有效性,在PSCAD/EMTDC平台搭建如图1所示的4端MMC-MTDC直流输电模型。MMC1容量最大为200 MW,设为主导站,工作在定电压模式;MMC3为100 MW工作在定功率控制模式;MMC2容量为50 MW,MMC4为100 MW,工作在自适应下垂控制模式。系统直流电压200 kV;MMC子模块个数50;桥臂等效电阻为2 Ω,电感为10 mH;直流线路阻抗采用集中参数等效;电压允许波动范围为额定值的5%,取值为(190,210)。
在稳态和暂态两种工况下对是否采用滑模控制的自适应下垂控制策略进行对比验证。自适应下垂控制记为方法1,本文所提控制策略记为方法2。
(1)算例1:稳态时潮流翻转
MMC2初始功率指令为-20 MW,MMC4为-50 MW。1.0 s后MMC3功率从50 MW降到20 MW,1.5 s后潮流翻转为-20 MW,2种方法仿真波形如图6、图7所示。对比图6和图7可以看出:系统功率改变时,MMC2和MMC4功率基本保持稳定;MMC3在暂态工况下系统波动基于滑模控制要比PI控制波动小。

图6 稳态时方法1仿真波形Fig.6 Simulation waveforms of method 1 under steady state

图7 稳态时方法2仿真波形Fig.7 Simulation waveforms of method 2 under steady state
图8为MMC1仿真细节对比,可以看出方法2功率控制精度更高,暂态特性更好。
(2)算例2:暂态时主站故障退出运行

图8 MMC1仿真细节对比Fig.8 MMC1 simulation detail comparison
图9、图10和图11为暂态故障下的仿真波形,图9为MMC2仿真细节对比,可以看出暂态特性下方法2具有更好的响应速度。MMC2和MMC4初始功率指令定为-40 MW,方法1中MMC1在0.8 s出现故障退出运行,在约0.3 s后系统达到新的稳定运行点;方法2在1.0 s时出现故障,近0.2 s达到新的稳定运行点。系统故障后,MMC2相比MMC4更接近满载,斜率系数MMC2较大,承担功率较大,稳定后MMC2功率为-18 MW,MMC4功率为-34 MW。1.5 s时MMC3输入功率增加到80 MW,此时MMC4功率裕度更大,承担功率偏差大于MMC2。电压偏差方法2要略小于方法1。对比后可以看出滑模控制下的自适应下垂控制响应速度更快,系统波动较小。

图9 MMC2仿真细节对比Fig.9 MMC2 simulation detail comparison

图10 暂态时方法1仿真波形Fig.10 Simulation waveforms of method 1 under transient state
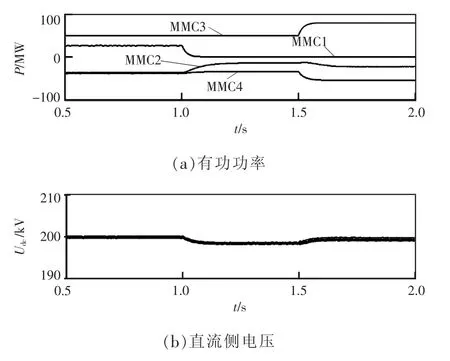
图11 暂态时方法2仿真波形Fig.11 Simulation waveforms of method 2 under transient state
5 结语
本文基于滑模控制理论针对MMC内特性对电流内环进行数学建模,采用积分滑模面和降低系统抖振的指数趋近律控制器;外环电压环采用自适应下垂控制,根据MMC瞬时功率与功率参考指令的比较,实时调节下垂曲线系数,让换流器“量力而行”,避免系统暂态时裕度小的MMC满载。最后搭建仿真模型验证,结果表明本文所提控制策略可以改善系统暂态特性,提高响应速度,实现功率的最优分配。
[1]Andreasson M,Wiget R,Dimarogonas D V,et al.Distributed frequency control through MTDC transmission systems[J].IEEE Transactions on Power Systems,2017,32(1):250-260.
[2]温家良,葛俊,潘艳,等.直流电网用电力电子器件发展与展望[J].电网技术,2016,40(3):663-669. Wen Jialiang,Ge Jun,Pan Yan,et al.Development and expec-tation of power electronic devices for DC grid[J]. Power System Technology,2016,40(3):663-669(in Chinese).
[3]Shi Xiaojie,Wang Zhiqiang,Liu Bo,et al.Characteristic investigation and control of a modular multilevel converter-based HVDC system under single-line-to-ground fault conditions[J].IEEE Transactions on Power Electronics,2015, 30(1):408-421.
[4]汤广福,罗湘,魏晓光.多端直流输电与直流电网技术[J].中国电机工程学报,2013,33(10):8-17. Tang Guangfu,Luo Xiang,Wei Xiaoguang.Multi-terminal HVDC and DC-grid Technology[J].Proceedings of the CSEE, 2013,33(10):8-17(in Chinese).
[5]吴金龙,刘欣和,王先为,等.多端柔性直流输电系统直流电压混合控制策略[J].电网技术,2015,39(6):1593-1599. Wu Jinlong,Liu Xinhe,Wang Xianhe,et al.Research of DC voltage hybrid control strategy for VSC-MTDC system [J].Power System Technology,2015,39(6):1593-1599(in Chinese).
[6]孙黎霞,陈宇,宋洪刚,等.适用于VSC-MTDC的改进直流电压下垂控制策略[J].电网技术,2016,40(4):1037-1043. Sun Lixia,Chen Yu,Song Honggang,et al.Improved voltage droop control strategy for VSC-MTDC[J].Power System Technology,2016,40(4):1037-1043(in Chinese).
[7]阎发友,汤广福,贺之渊,等.基于MMC的多端柔性直流输电系统改进下垂控制策略[J].中国电机工程学报,2014, 34(3):397-404.Yan Fayou,Tang Guangfu,He Zhiyuan,et al.An improved droop control strategy for MMC-based VSC-MTDC systems[J].Proceedings of the CSEE,2014,34(3):397-404(in Chinese).
[8]吴国祥,孙继国,顾菊平.大规模海上风电场多端直流输电系统的最优电压控制[J].高电压技术,2016,42(9): 2733-2739. Wu Guoxiang,Sun Jiguo,Gu Juping.Optimum voltage control for multi-terminal HVDC transmission systems connected to large offshore wind farms[J].High Voltage Engineering,2016,42(9):2733-2739(in Chinese).
[9]宋平岗,吴继珍,邹欢.电网电压不平衡时模块化多电平换流器直接功率补偿控制策略[J].高电压技术,2016,42(7):2184-2192. Song Pinggang,Wu Jizhen,Zou Huan.Direct power compensation control strategy for modular multilevel converter under unbalanced grid voltage conditions[J].High Voltage Engineering,2016,42(7):2184-2192(in Chinese).
[10]Abdel-Khalik A S,Massoud A M,Elserougi A A,et al. Optimum power transmission-based droop control design for multi-terminal HVDC of offshore wind farms[J].IEEE Transactions on Power Systems,2013,28(3):3401-3409.
[11]马辉,谢运祥.基于滑模变结构的Vienna整流器新型双闭环控制策略研究[J].电工技术学报,2015,30(12):143-151. Ma Hui,Xie Yunxiang.A novel dual closed-loop control strategy based on sliding-mode variable structure of vienna-type rectifier[J].Transactions of China Electrotechnical Society,2015,30(12):143-151(in Chinese).
[12]王康,兰洲,甘德强,等.非线性系统自适应控制及其在电力系统中的应用[J].电网技术,2007,31(11):11-16. Wang Kang,Lan Zhou,Gan Deqiang,et al.A survey on adaptive control of nonlinear systems and its application in power systems[J].Power System Technology,2007,31(11): 11-16(in Chinese).
[13]王姗姗,周孝信,汤广福,等.模块化多电平电压源换流器的数学模型[J].中国电机工程学报,2011,31(24):1-8.Wang Shanshan,Zhou Xiaoxin,Tang Guangfu,et al.Modeling of modular multi-level voltage source converter[J]. Proceedings of the CSEE,2011,31(24):1-8(in Chinese).
[14]李云丰,汤广福,贺之渊,等.MMC型直流输电系统阻尼控制策略研究[J].中国电机工程学报,2016,36(20):5492-5503. Li Yunfeng,Tang Guangfu,He Zhiyuan,et al.Damping control strategy research for MMC based HVDC system[J]. Proceedings of the CSEE,2016,36(20):5492-5503(in Chinese).
[15]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418. Liu Jinkun,Sun Fuchun.Research and development on theory and algorithms of sliding mode control[J].Control Theory &Applications,2007,24(3):407-418(in Chinese).
[16]李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(3):431-437. Li Zheng,Hu Guangda,Cui Jiarui,et al.Sliding-mode variable structure control with integral action for permanent magnet synchronous motor[J].Proceedings of the CSEE, 2014,34(3):431-437(in Chinese).
[17]殷桂梁,陈思佳,吴杰,等.含不平衡负荷的微电网中并网逆变器的滑模控制策略[J].电网技术,2016,40(9):2698-2705. Yin Guiliang,Chen Sijia,Wu Jie,et al.Sliding-mode control strategies of grid-connected inverters in micro-gridcontaining unbalanced loads[J].Power System Technology, 2016,40(9):2698-2705(in Chinese).
[18]李云丰,汤广福,庞辉,等.直流电网电压控制器的参数计算方法[J].中国电机工程学报,2016,36(22):6111-6121.Li Yunfeng,Tang Guangfu,Pang Hui,et al.Controller parameters calculating method of DC voltage loop for DC grid[J].Proceedings of the CSEE,2016,36(22):6111-6121(in Chinese).
[19]郑雪梅,李琳,徐殿国.双馈风力发电系统低电压过渡的高阶滑模控制仿真研究[J].中国电机工程学报,2009,S1: 178-183. Zheng Xuemei,Li Lin,Xu Dianguo,et al.Simulation study on higher-order sliding mode control of DFIG wind energy system under low voltage ride through[J].Proceedings of the CSEE,2009,S1:178-183(in Chinese).
Adaptive Droop Control Strategy Based on Sliding Mode Control for MMC-MTDC
SONG Pinggang,DONG Hui,LIU Wu,ZHOU Zhenbang
(School of Electrical and Automation Engineering,East China Jiaotong University,Nanchang 330013,China)

宋平岗
10.13234/j.issn.2095-2805.2017.5.100
TM46
A
2017-04-19;
2017-08-08
国家自然科学基金资助项目(51367008)
Project Supported by National Natural Science Foundation of China(51367008)
宋平岗(1965-),男,博士,教授,研究方向:电力电子与新能源,E-mail:pgsong@ ecjtu.edu.cn。
董辉(1990-),男,通信作者,硕士研究生,研究方向:高压直流输电,E-mail:do nghuieasy@163.com。
刘武(1993-),男,硕士研究生,研究方向:智能建筑设计,E-mail:875590561@ qq.com。
周振邦(1993-),男,硕士研究生,研究方向:高压直流输电,E-mail:apabang@ qq.com。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
大电机技术(2021年5期)2021-11-04
光通信研究(2020年2期)2020-06-15
科技创新与应用(2019年17期)2019-06-09
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2018年14期)2018-08-21
中国铁道科学(2014年6期)2014-06-21
电力工程技术(2014年5期)2014-03-20
