
半潜式超大型浮式结构水动力系数研究
2017-10-11 11:10李青美吴林键王元战
海洋工程 2017年1期
李青美,吴林键,王元战,李 怡
(1. 天津大学 水利工程仿真与安全国家重点实验室,高新船舶与深海开发装备协同创新中心,天津 300072; 2. 重庆交通大学 河海学院,重庆 400074)
半潜式超大型浮式结构水动力系数研究
李青美1,吴林键1,王元战1,李 怡2
(1. 天津大学 水利工程仿真与安全国家重点实验室,高新船舶与深海开发装备协同创新中心,天津 300072; 2. 重庆交通大学 河海学院,重庆 400074)
以半潜式超大型浮式结构在动力响应分析中的各水动力系数为研究对象,经理论推导得到D’Alembert动力学方程中的移动式海上基地(MOB)单模块运动的结构质量、结构附加质量、静恢复力系数的简易计算公式。以MOB的“三模块模型”为例,研究其在6级海况浪向角为0°~90°条件下,各模块的附加质量系数及静恢复力系数的历时规律,以实例MOB中的第1个模块为代表展示了计算结果,并统计其最大值与文献资料中的结果进行对比。结果表明:运用本理论公式计算的结果与文献中所得结果相似,可验证本理论公式的正确性、可行性与合理性,为求解半潜式超大型浮式结构模块动力响应位移及转角提供简便的方法。
半潜式;超大型浮式结构;动力响应分析;水动力系数;移动式海上基地
Abstract: This paper investigates the hydrodynamic coefficients of semi-submersible type very large floating structures. Some simplified formulas about structural mass, added mass and static resilience coefficients in D’Alembert dynamic equations of moblie offshore base (MOB) single module motion were derived. A 3-module semi-submersible type structure at sea state 6 (SS6) was performed as a case study, and different incident angles of wave were considered. The solved results about the added mass and static resilience coefficients of module 1(M1) were shown in this paper, and the values were quite similar with the conclusions of other references. The correctness, feasibility and rationality of theoretical formulas of each hydrodynamic coefficient could be verified, and it can provide the simplified method for calculating the hydrodynamic response of very large floating structures.
Keywords: semi-submersible type; very large floating structures; dynamic response analysis; hydrodynamic coefficients; mobile offshore base
超大型浮式结构(very large floating structure,简称VLFS)是一种几何尺度以千米度量的独特海工浮式结构[1]。由于其尺度巨大,VLFS是由连接构件将其各个模块连接起来共同构成的一个组合式结构[2]。半潜式结构[3]是VLFS中极具代表性的结构型式,其水动力特性更佳,更能够适应恶劣的海洋环境,是人类探索深海奥秘的重要依托工具。因此,目前大量的学者将其研究的重点落脚到半潜式超大型浮式结构中。如图1为半潜式超大型浮式结构中最典型的移动式海上基地(mobile offshore base,简称MOB)的概念设计图[4],其单模块是由1个上体工作平台、多个立柱和浮箱共同构成。
当前,分析VLFS在外海恶劣海洋环境下的动力响应是许多海洋工程工作者致力于研究的问题。在这一研究中,结构运动的各水动力系数是必须要求得的重要计算参数,对于半潜式浮式钻井平台结构动力响应预报方法普遍是以三维势流理论为主,包括频域或时域计算分析[5-8],其分析流程大致包括:
一、建立结构的水动力模型;二、基于三维势流理论对半潜式平台的水动力模型进行频域分析X(ω),从而可得到各不同频率下的水动力系数——附加质量、阻尼系数、响应幅值算子(RAO)等等,组成频域下的水动力参数数据库,并可结合频谱分析对特定海况下的波浪诱导运动与载荷的统计值进行预报,这一过程可通过现有软件(如:SESAM-HydroD、AQWA-Line、WAMIT等)得以实现;三、在此基础上,为分析半潜式平台在实际风、浪、流环境荷载作用下的水动力响应,还需进行时域计算分析,也可通过现有软件(如:SESAM-DeepC,AQWA-Drift等)进行模拟。

图1 移动式海上基地概念设计图示(MOB) Fig. 1 Conceptual design of mobile offshore base(MOB)
基于势流理论的半潜式平台水动力分析方法也被广泛应用于VLFS动力响应的研究当中。在上述分析流程中的第二步中,Wang等[9]研究了MOB的动力响应,考虑了模块的流-固耦合作用,基于势流理论并结合单对称-复合奇点分布法求解得到结构的水动力系数,最终求解得到结构的动力响应位移。Riggs等[10]分析了多模块的VLFS在规则波激励下的动力响应,基于势流理论,计算得到VLFS的水动力系数,并最终求解得到结构的动力响应结果。余澜[11]同样研究了MOB结构的动力特性,基于三维势流理论及多刚体运动理论,在频域内求解得到了MOB模块的各水动力系数。研究过程中考虑了模块间的相互影响,最终计算得到了MOB动力响应位移与不同海况、浪向角及连接构件刚度之间的关系。张波[12]基于势流理论对多模块的MOB结构进行三维水动力分析,运用SESAM软件在频域内分别计算得到多个MOB模块分别在不同浪向角、不同波浪频率的规则波作用下的各水动力系数,并最终得到了各模块的运动响应位移。汪伍洋[13]利用三维势流理论对MOB的水动力进行分析,运用HydroD软件,在频域内计算了5个模块的MOB结构在随机波不同浪向角条件下的水动力系数,提取其结果导入自编程序中,从而求解得到不考虑模块之间相互影响时MOB的动力响应位移。刘超[14]基于三维势流理论,运用DNV-SESAM-WADAM软件计算得到MOB结构运动的各水动力系数,并在频域内研究了不同模块数量、不同海况及浪向角等因素对结构运动响应的影响。
虽然势流理论具备计算精度高、普遍适用性强及商业软件多等优点而被广泛的应用,但其中的基本原理相对繁琐且复杂,多次迭代过程会耗费大量的求解时间,降低计算效率,在进行结构初步设计阶段时,往往不需要要求如此高的精度。故以图1所示的MOB结构作为研究对象,避开势流理论复杂的理论机制,根据基本原理详细推求得到MOB结构动力响应分析中各水动力系数(结构质量、附加质量、静恢复力系数)的简易计算表达式,并结合实例以验证本计算公式计算结果的正确性、合理性及可行性,为MOB结构动力响应研究奠定基础。
1 VLFS动力响应总体研究思路
根据海工结构动力学的相关理论,将MOB的多模块结构看作多自由度体系,可将结构整体按如图2所示概化。
图中Mi(i=1,2,……)表示MOB中的第i个模块,Cj(j=1,2,……)表示其上第j个连接构件。根据结构动力学D'Alembert原理,MOB多自由度体系的整体动力学平衡方程可写为:

同时,由于外部激励荷载是随时间t在变化,故式(1)中的各部分也应是时变项,则式(1)可写为:

式(2)表示了MOB整体结构的动力平衡关系,由于MOB尺度巨大,对其整体进行研究比较复杂,因此,采取隔离法来对其各单模块进行分析,即MOB单模块的动力学方程为:
在式(3)中,由于针对MOB单模块进行隔离分析,故式(2)中的整体刚度矩阵Ks=0;同时,弹性连接构件的约束荷载Fc(t)由内力变为了外力,因此,将其写在等式右端,该项也为时变项。

图2 MOB多自由度体系简化模型Fig. 2 Multi-degree freedom system simplified model of MOB
综上所述,在任意时刻,MOB单模块在外部环境荷载励下将对应纵荡、横荡、垂荡、横摇、纵摇、艏摇这6个自由度方向的运动,因此,可根据式(3)建立MOB单模块在6个运动自由度方向上的动力学方程,求解得到结构的动力响应位移和转角。基于图1所示的MOB结构,经理论推导得到式(3)中结构质量、附加质量及静恢复力系数的简易计算表达式,并结合实例加以验证,为理论分析MOB结构动力响应提供基础。同时,定义MOB的整体坐标系oxyz、局部坐标系ox′y′z′及几何尺寸,如图3、图4和图5所示。整体坐标系中,波浪传播的浪向角为δ,其值在0°~90°范围内变化。
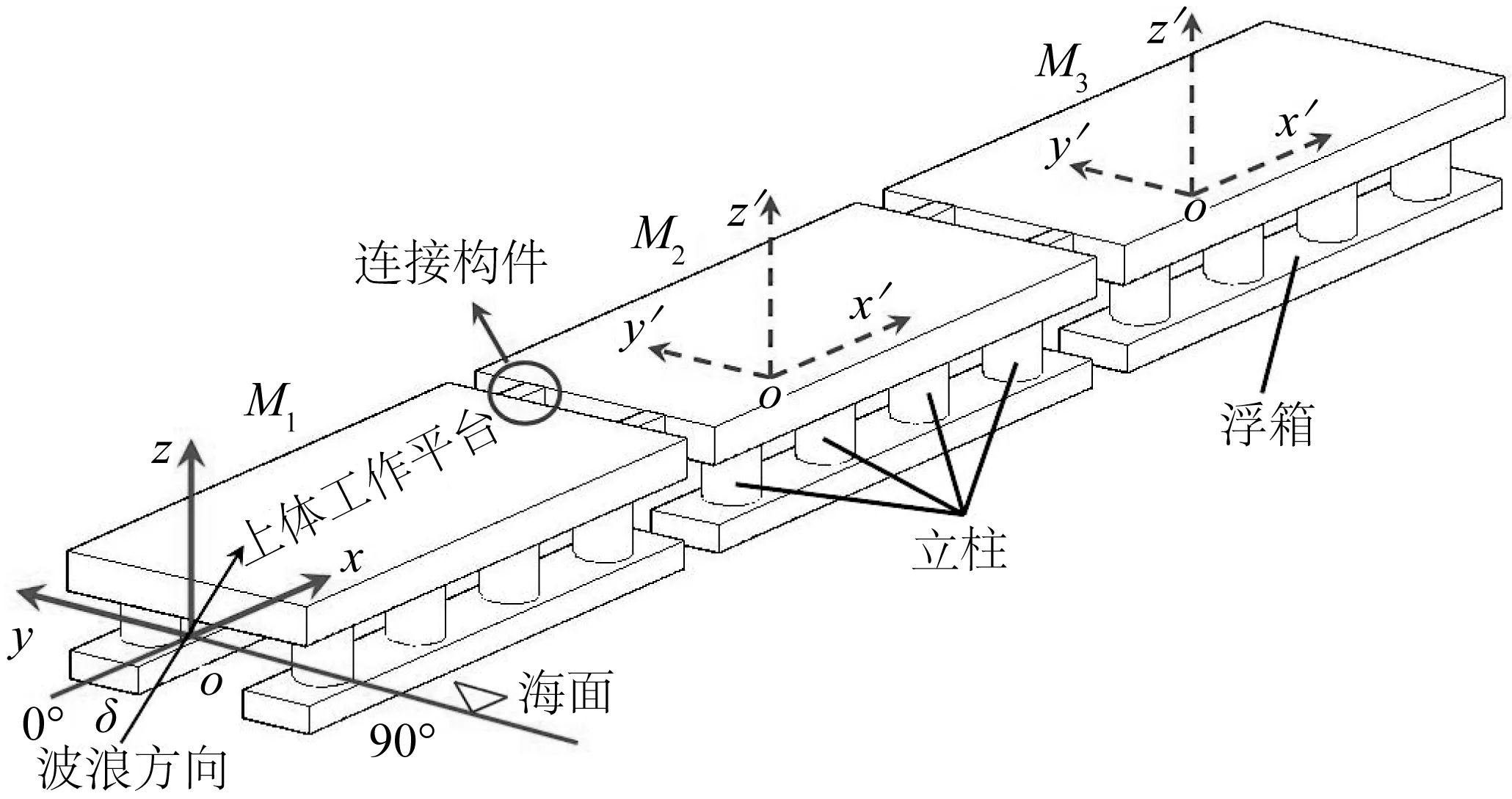
图3 MOB模型整体坐标系、局部坐标系Fig. 3 Global and local coordinate system of MOB model

图4 oy'z'平面Fig. 4 oy'z' plane

图5 ox'z'平面Fig. 5 ox'z' plane
2 水动力系数
2.1结构质量矩阵
MOB单模块的结构质量矩阵为6×6的对角阵,其表达式可写为:
式中:ms为MOB单模块质量,ms=mwp+kmc+k'mbt,mwp为上体工作平台的质量,k、k'分别为MOB单模块立柱、浮箱的个数,mc为单个立柱的质量,mbt为单个浮箱的质量;Ixx,Iyy,Izz分别为MOB单模块在横摇、纵摇、艏摇运动方向上的转动惯量。
2.2结构附加质量矩阵
2.2.1 纵荡附加质量


同理,可根据上述过程推导得出MOB单模块在横荡、垂荡方向上的附加质量分别为:
由于立柱下端与浮箱连成一整体,其上端位于水面以上,因此,MOB垂荡方向上的附加质量只由浮箱运动产生。

图6 MOB单模块纵荡运动切片Fig. 6 Surge motion section of MOB single module

图7 MOB模块在纵摇方向上的切片Fig. 7 Pitch motion section of MOB single module
2.2.2 纵摇附加质量
图7为MOB发生纵摇时的切片图。分别对其中各构件进行分析,其上立柱和浮箱的运动加速度分布如图8所示。

图8 立柱和浮箱纵摇加速度分布图Fig. 8 Pitch acceleration distribution of columns and buoyancy tanks


同理,单个MOB模块共有k个立柱和k'个浮箱,并除去上式中的平均加速度项,则MOB模块的总纵摇附加质量为:
同理,可推导得出MOB在横摇、艏摇方向上的附加质量分别为:

同样,在MOB模块发生艏摇运动时,立柱不产生附加质量。综上所述,可得单个MOB模块的附加质量矩阵为:
式中的各几何符号可详见图3、图4和图5所示。
2.3静恢复力系数矩阵
浮体运动时,只在垂荡、横摇及纵摇方向上受恢复力影响[16],根据文献[16]中的计算公式,可分别推导得到MOB模块分别在垂荡、横摇和纵摇方向上的静恢复力系数。
1)垂荡静恢复力系数
式中:Aw为MOB水线面总面积,k为MOB单模块立柱的数量。
2)横摇静恢复力系数
式中:zG,zB分别为MOB模块的重心、浮心坐标。MOB在波浪力作用下,其单模块的浮心会随时间而发生变化,故浮心坐标的表达式为:

在式(16)的第二项中,由于当MOB结构不同时,所得的计算表达式也存在差异,故文中只推导图3、图4和图5所示MOB模型(单模块立柱k=8、浮箱k'=2)的计算式:
因此,对于图4、5所示MOB结构,其横摇静恢复力系数可写为:

3)纵摇静恢复力系数
同理,根据(20)可推导得出图4所示MOB结构的纵摇静恢复力系数为:

综上所述,MOB的静恢复力系数矩阵为:

3 实例分析
3.1MOB原型几何尺度
本文实例MOB的原型按照Yu[17]、Krieble等[18]、丁伟[19]等的概念设计成果为依据,其单模块的主要几何尺度参数如图9所示。取MOB“三模块模型”作为数值模型,计算各模块的水动力系数,MOB“三模块模型”概念设计见图3,其中M1、M2、M3分别代表MOB结构的第1、2、3个模块。

图9 MOB单模块的几何尺寸Fig. 9 Geometric dimensions of MOB single module
3.2随机不规则波浪场
从前文中各水动力系数的计算公式中可看出,各系数不仅为时变项,而且与波浪场中的波面变化相关。因此,要想计算得到不同时刻MOB单模块的水动力系数,则必须先模拟得到随机不规则波的波浪场。基于规则波叠加的理论来生成不规则波[20],运用Bretschneider双参数谱来模拟得到北太平洋开场海面6级海况(SS6)条件下不规则波的波浪场,详细过程见文献[15]。
3.3结构质量
根据文献资料[19],其单模块的结构质量参数分别为ms=1.26×108kg,Ixx=7.70×1011kg.m,Iyy=1.97×1012kg.m,Izz=2.50×1012kg.m,将各系数代入式(4)中,即可得到结构质量矩阵。
3.4结构附加质量
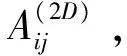
1)M1结构附加质量-历时关系
根据式(14)可计算得到实例MOB单模块在6个自由度方向上的结构附加质量随时间的变化规律。由于篇幅有限,故只列举M1的计算结果,M2、M3的计算结果类似。这里取t=3 600 s作为计算时长,取浪向角分别为0°、15°、30°、45°、60°、75°、85°、90°。



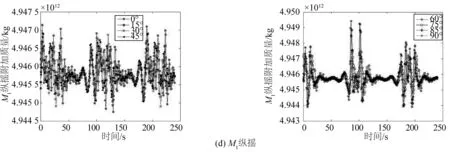
图10 不同浪向角条件下M1结构附加质量-历时关系Fig. 10 The added mass of M1-time along different wave angles

2)M1最大附加质量与文献结果对比
分别统计得到不同浪向角条件下M1在6个自由度方向上的最大附加质量,并将其与文献[11]中基于三维势流理论的计算结果进行对比,如图11所示。
图11 M1最大附加质量与文献结果对比Fig. 11 Comparison between the max added mass of M1 and the conclusions of references
从图11中可以看出,M1在6个自由度方向上的最大附加质量与文献中所得结论非常接近,可验证文中结构附加质量系数理论公式和数值计算结果的正确性与合理性。
3.5静恢复力系数
1)M1的静恢复力系数-历时关系



图12 M1静恢复力系数-历时关系Fig. 12 Static resilience coefficients of M1-time
2)M1最大静恢复力系数与文献结果对比
本文的MOB模型几何尺度是根据文献[11]来拟定的,单个MOB模块共包含1个上体,8个立柱和2个浮箱,但在文献[11]中未给出MOB单模块静恢复力系数的结果。经查阅其他的文献资料发现,Wang等[21]也基于三维势流理论研究了类似的MOB结构,其单模块是由1个上体,6根立柱以及2个浮箱组成,并且其结构形式及各构件的几何尺度与本文研究的MOB单模块结构十分相似,故将文中MOB静恢复力系数的理论计算方法应用到Wang等[21]所研究的MOB模型中,并将其计算结果与Wang等[21]的结果相互对比,如图13所示。

图13 M1的最大静恢复力系数与文献结果对比Fig. 13 Comparison between the max static resilience coefficients of M1 and the conclusions of references
从图13中可以看出,运用本文理论方法计算文献[21]中MOB模型的结果与其原文的结论相比,无论是变化趋势还是数值大小,都比较接近;同时,在不同浪向角条件下,本文MOB单模块M1在垂荡、横摇及纵摇方向上的最大静恢复力系数的变化趋势与文献[21]中的结果能够保持一致,且数值大小也在同一数量级,综上所述,可验证本文静恢复力系数理论计算公式的正确性。
4 结 语
研究了半潜式超大型浮式结构中的各水动力系数,经理论推导得到了D’Alembert动力学方程中MOB单模块运动的结构质量、结构附加质量、静恢复力系数的简易计算公式,阻尼系数可参考文献资料进行取值。以MOB结构的“三模块模型”为例,研究其在6级海况浪向角为0°~90°条件下,各模块的附加质量系数及静恢复力系数的历时规律,以其中的M1为代表展示了计算结果,并统计其最大值与文献资料中的结论进行对比。结果表明:运用本文理论公式计算的结果与文献中所得结论相似,从而验证了本公式的正确性、可行性与合理性,为分析半潜式超大型浮式结构模块动力响应奠定扎实的理论基础。
[1] WANG C M, WATANABE E, UTSUNOMIYA T. Very large floating structures[M]. Britain: Taylor and Francis Group, 2007.
[2] WATANABE E, WANG C M, UTSUNOMIYA T, et al. Very large floating structures: applications, analysis and design[R]. Center for Offshore Research and Engineering, National University of Singapore, 2004.
[3] 崔维成,吴有生,李润培. 超大型海洋浮式结构物开发过程中需要解决的关键技术问题[J]. 海洋工程,2000,18(3):1-8.(CUI Weicheng, WU Yousheng, LI Runpei. Technical problems in the development of very large floating structures[J]. The Ocean Engineering, 2000, 18(3): 1-8.(in Chinese))
[4] 崔维成,吴有生,李润培. 超大型海洋浮式结构物动力特性研究综述[J]. 船舶力学,2001,5(1):73-81.(CUI Weicheng, WU Yousheng, LI Runpei. Recent researches on dynamic performances of very large floating structures[J]. Journal of Ship Mechanics, 2001, 5(1): 73-81.(in Chinese))
[5] SOLEMEZ M, ATLAR M. A comparative study of two practical methods for estimating the hydrodynamic loads and motions of a semi-submersible[J]. Journal of Offshore Mechanics and Arctic Engineering, 2000, 122: 57-65.
[6] CLAUSS G F, SCHMITTNER C E, STUTZ K. Freak wave impact on semi-submersibles time-domain analysis of motions and forces[C]//Proceedings of the Thirteenth International Offshore and Polar Engineering Conference. 2003: 365-371.
[7] 李长东. 深水半潜式钻井平台水动力性能分析及响应控制[D]. 青岛:中国海洋大学,2014.(LI Changdong. Hydrodynamic performance analysis and motion control of deepwater semi-submersible drilling unit [D]. Qingdao: Ocean University of China, 2014.(in Chinese))
[8] 余涛. 半潜式平台结构疲劳强度分析及延寿评估[D]. 大连:大连理工大学:2014.(YU Tao. The analysis of fatigue of semi-submersible platform and evaluation of prolonged life[D]. Dalian: Dalian University of Technology, 2014.(in Chinese))
[9] WANG D Y, RIGGS H R, ERTEKIN R C. Three-dimensional hydro elastic response of a very large floating structure[J]. International Journal of Offshore and Polar Engineering, 1991, 1: 307-316.
[10] RIGGS H R, ERTEKIN R C. Approximate methods for dynamic response of multi-module floating structures[J]. Marine Structure, 1993, 6: 117-141.
[11] 余澜. 移动式海上基地(Mobile Offshore Base-MOB)连接器动力响应研究[D]. 上海:上海交通大学,2004.(YU Lan. Study on dynamic response of connectors of mobile offshore base[D]. Shanghai: Shanghai Jiao Tong University, 2004.(in Chinese))
[12] 张波. 超大型浮式结构物动力响应与风险评估研究[D]. 镇江:江苏科技大学,2013.(ZHANG Bo. Hydrodynamic response and risk assessment of very large floating structure[D]. Zhenjiang: Jiangsu University of Science and Technology, 2013.(in Chinese))
[13] 汪伍洋. 多体超大型浮式结构物连接器的设计及载荷的初步分析[D]. 镇江:江苏科技大学,2014.(WANG Wuyang. Design of connectors and analysis of its load in multi-very large floating structure[D]. Zhenjiang: Jiangsu University of Science and Technology, 2014.(in Chinese))
[14] 刘超. 超大型浮体多模块柔性连接结构响应研究[D]. 北京:中国舰船研究院,2014.(LIU Chao. Research on structural response of multi-module flexible connectors for very large floating structures[D]. Beijing: Academy of Ship in China, 2014.(in Chinese))
[15] 吴林键. 深水超大型浮式结构连接构件动力特性研究[D]. 重庆:重庆交通大学,2015.(WU Linjian. Study on dynamic characteristics of connectors in very large floating structure in deep water[D]. Chongqing: Chongqing Jiaotong University, 2015.(in Chinese))
[16] 聂武,刘玉秋. 海洋工程结构动力分析[M]. 哈尔滨:哈尔滨工程大学出版社,2002.(NIE Wu, LIU Yuqiu. Structural dynamic analysis in ocean engineering[M]. Harbin: Harbin Engineering University Press, 2002.(in Chinese))
[17] YU L, LI R P, SHU Z. Dynamic responses of mobile offshore base connectors[J]. China Ocean Engineering, 2003, 17(4): 469-479.
[18] KRIEBEL D, WALLENDORF D. Physical model tests on a generic MOB module[C]//Proceedings of the Third International Workshop on Very Large Floating Structure. 1999: 511-520.
[19] 丁伟. 移动式海上基地试验研究[D]. 上海:上海交通大学,2004.(DING Wei. Experimental research on mobile offshore base[D]. Shanghai: Shanghai Jiao Tong University, 2004.(in Chinese))
[20] 陈徐均,沈庆,孙芦忠,等.柔性连接多浮体在不规则波中运动的预报方法[J]. 水动力学研究与进展:A辑,2000,15(4):444-448.(CHEN Xujun, SHEN Qing, SUN Luzhong, et al. A prediction method of motions of a moored flexibly joint multi-body floating system responding to irregular waves[J]. Journal of Hydrodynamics, 2000, 15(4): 444-448.(in Chinese))
[21] 王璞,余澜,李润培. 半潜式超大浮体连接器动力特性的一种时间序列分析方法[J]. 海洋工程, 2002, 20(3): 9-13. (WANG P, YU L, LI R P. A time sequence analysis method for predicting connector loads in a semi-submersible very large floating structure[J]. The Ocean Engineering, 2002, 20(3): 9-13. (in Chinese))
Hydrodynamic coefficients of semi-submersible type very large floating structures
LI Qingmei1, WU Linjian1, WANG Yuanzhan1, LI Yi2
(1. State Key Laboratory of Hydraulic Engineering Simulation and Safety, Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration, Tianjin University, Tianjin, 300072 China; 2. School of River and Ocean Engineering, Chongqing Jiaotong University, Chongqing, 400074 China)
P751
A
10.16483/j.issn.1005-9865.2017.01.001
1005-9865(2017)01-0001-11
2016-02-03
国家自然科学基金(51679166);国家自然科学基金创新研究群体科学基金(51321065);交通运输部交通建设科技项目(2014328224040)
李青美(1978-),女,山东青岛人,博士研究生,主要从事港口海岸及近海工程方面的研究。E-mail:qingmei@tju.edu.cn
王元战(1958-)。E-mail:yzwang@tju.edu.cn
猜你喜欢
海洋通报(2021年5期)2021-12-21
海洋石油(2021年3期)2021-11-05
中国海上油气(2020年5期)2020-10-20
重型机械(2020年2期)2020-07-24
建材发展导向(2019年10期)2019-08-24
灾害学(2018年2期)2018-04-12
船海工程(2015年4期)2016-01-05
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
振动与冲击(2014年16期)2014-09-08
中国工程咨询(2014年3期)2014-02-03
