小型圆捆机捆草-卸捆自动操纵与报警装置研究
2017-10-11 01:34尹建军吴启斌陈永河王新新
农业机械学报 2017年9期
尹建军 吴启斌 陈永河 王新新
(江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013)
小型圆捆机捆草-卸捆自动操纵与报警装置研究
尹建军 吴启斌 陈永河 王新新
(江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013)
针对小型圆捆机捆草与卸捆过程依赖机手频繁回头观察并手动操纵的问题,设计了由行程开关、单片机、电动缸操纵机构和蜂鸣器组成的捆草-卸捆自动操纵与报警装置。通过分析捆草与卸捆工作过程,采用3个行程开关分别感知成捆室满仓、草捆捆扎结束和草捆落地,设计了捆草-卸捆控制流程,确定了控制系统的捆扎时间、卸捆时间等控制参数。室内工况模拟试验表明单片机能处理行程开关的触发信号,使电动缸伸缩实现液压阀手柄自动操作卸捆,蜂鸣器在捆草-卸捆过程发出不同节奏的报警提示音,并有效感知行程开关误触发和器件故障,提高了系统可靠性。样机的秸秆捡拾打捆试验表明,该装置可提高小型圆捆机作业效率22.5%~32.2%,捆草-卸捆成功率100%。
小型圆捆机; 捆草; 报警装置
引言
小型圆捆机特别适合我国南方小田块秸秆收集,普遍应用麻绳缠绕式草捆捆扎和卸捆工艺。但是,现有小型圆捆机的草捆捆扎和卸捆过程自动化程度低,作业过程中需要机手频繁回头观察草捆是否满仓、捆扎是否结束、草捆是否滞留成捆室等。卸捆过程中,需要机手扳动液压阀操作手柄打开成捆室后仓完成卸捆。频繁回头和手动操作增加了机手的工作强度,增加了停车时间,降低了小型圆捆机的作业效率。
目前,国外对圆捆机相关技术的研究主要集中在缠网式圆捆机设计、捆扎损失等作业效果评估等方面[1-3]。国内学者对圆捆机的研究主要集中在中型圆捆机丝网缠绕装置设计[4-5]、作业过程控制系统设计与试验[6-8]、成型室等关键部件结构设计与卷捆机理分析[9-14]、不同种类秸秆卷捆过程的应力松弛[15]、流变行为[16]和秸秆摩擦因数[17]试验研究等方面。但是,对于小型圆捆机设计与试验研究较少[18],没有涉及小型圆捆机作业过程控制自动化研究。
本文通过分析小型圆捆机捆草与卸捆的工作原理,设计捆草-卸捆自动操纵与报警装置,并进行工况模拟试验和样机试验,为小型圆捆机捆草和卸捆自动化水平的提升提供技术支撑。
1 捆草与卸捆工作原理分析
1.1 捆草过程分析
如图1所示,拖拉机输出动力给9JYD-50型圆捆机,作业速度2~5 km/h,捡拾器不断将秸秆捡起并喂入到成捆室中,捡拾器宽度70 cm。秸秆在旋转钢辊摩擦力作用下,以缠绕的形式逐渐形成草芯。随着秸秆不断喂入,草捆直径逐渐增大,并且形成外紧内松的圆草捆,当成捆室内圆草捆通过钢辊作用于后仓上的合力与液压缸推力达到平衡时,可视为草捆满仓,满仓时草捆的直径为50 cm。草捆密度由液压系统溢流阀设定的工作压力决定。预先引入成捆室前仓的麻绳受到草捆摩擦力作用随着草捆旋转而缠绕在草捆上,麻绳带动绕绳轮旋转,从而带动曲柄旋转,曲柄通过连杆带动摆臂摆动,在此过程麻绳被割绳刀切断,完成草捆捆扎。此时,机手停车并扳动液压阀操作手柄打开成捆室后仓门完成卸捆,等待草捆落地后再松开液压阀操作手柄。

图1 小型圆捆机结构示意图Fig.1 Structure diagram of minitype round baler1~12.钢辊 13.成捆室 14.液压缸 15.麻绳 16.摆臂 17.曲柄 18.绕绳轮 19.液压阀操作手柄 20.减速器 21.捡拾器 22.弹齿 23.成捆室喂入口 24.车轮
为了感知草捆满仓,对割绳驱动机构进行运动分析,如图2所示。割绳驱动机构为一曲柄摇杆机构[16],当曲柄旋转时,表示成捆室满仓,草捆达到设定密度,开始缠绕式捆草。摆臂从初始位置CD顺时针快速摆动到水平极限位置CD1,摆臂的摆动轨迹为扇形CDD1,可在此区域内安装接触式行程开关,获取摆臂触发的行程开关开闭信号,从而感知草捆满仓。

图2 割绳驱动机构运动与行程开关安装示意图Fig.2 Sketch of motion of rope-cutting driving mechanism and stroke switch installation1.麻绳 2.摆臂 3.行程开关 Ⅰ 4.草捆 5.行程开关 Ⅱ 6.限位块 7.割绳刀 8.拉簧 9.成捆室侧壁 10.曲柄 11.连杆

根据上述捆草过程分析,行程开关Ⅰ安装在摆臂摆动轨迹的中部,用来感知成捆室满仓。行程开关Ⅱ安装在割绳刀摆动右极限位置的限位块前侧,用来感知草捆捆扎结束。
当成捆室内草捆达到满仓后,麻绳在草捆旋转和摆臂摆动的作用下以曲线的形式将草捆捆扎。捆扎草捆的时间可以通过草捆旋转的速度与麻绳捆扎的圈数确定。
草捆与钢辊的运动关系满足
ωr=ω1r1
(1)
式中ω——草捆旋转角速度r——草捆半径ω1——钢辊旋转角速度r1——钢辊半径
捆扎过程中,保持拖拉机动力输出稳定,钢辊匀速转动,在摩擦力作用下使草捆在成捆室内转动,捆草时间tk可表示为

(2)
式中m——麻绳缠绕草捆的总圈数n1——钢辊转速
实测9JYD-50型圆捆机麻绳缠绕草捆8圈完成捆扎,钢辊转速n1=180 r/min,钢辊半径r1=75 mm。成捆室满仓时,草捆的半径r=0.25 m,由式(2)可得捆扎草捆的时间tk=8.9 s,该值为圆草捆匀速转动情况下的理论计算值。
1.2 卸捆过程分析
草捆捆扎结束后,机手扳动液压缸控制手柄,油缸回缩,成捆室后仓门打开,草捆在钢辊的驱动和自身重力下沿落捆缓冲架落地,此时落捆缓冲架绕转轴铰接处向下摆动,如图3所示。

图3 卸捆过程及行程开关安装示意图Fig.3 Structure diagram of unloading process and stroke switch installation1.行程开关Ⅲ 2.落捆缓冲架 3.草捆
为了及时感知草捆沿落捆缓冲架落地而未滞留在成捆室内,可以在落捆缓冲架向下摆动的轨迹上安装接触式行程开关Ⅲ,由落捆缓冲架的长臂触发行程开关的开闭信号。
在后仓门逐步打开的过程中,钢辊对草捆的驱动作用逐渐减弱直到停止,加上草捆与成捆室侧壁的摩擦作用,使得草捆在后仓门开启的过程中旋转速度逐渐减小,当后仓门完全打开后,草捆的旋转速度近似为零。草捆在自身的重力作用下沿落捆缓冲架落地。为分析方便,沿落捆缓冲架方向的初速度设为零,如图4所示,由于落捆缓冲架长度L相对于草捆直径D略大,且草捆属于粘弹性物料,在重力作用下与硬质金属的落捆缓冲架接触时有较大变形,因此为分析方便忽略草捆沿落捆缓冲架下落过程的滚动摩擦,视其为滑动下落过程。
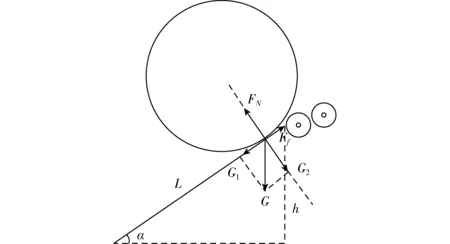
图4 卸捆过程分析Fig.4 Analysis of bale-unloading process
由图4的草捆受力分析,草捆沿落捆缓冲架方向所受合力可表示为
Ft=G1-Ff=Mgsinα-μFN=Ma
(3)
式中G1——草捆所受重力沿草捆缓冲架方向分力M——草捆质量α——落捆缓冲架与地面夹角Ff——草捆滑动摩擦力μ——草捆与落捆缓冲架的摩擦因数FN——落捆缓冲架对草捆的正压力
由式(3)得草捆沿落捆缓冲架下落的加速度为

(4)
式中h——落捆缓冲架铰接处与地面距离
由运动学公式
(5)
得到卸捆的理论时间tx为

(6)
根据9JYD-50型圆捆机技术参数,确定L=0.5 m,h=0.24 m,μ为0.45~0.55,取μ=0.5。将以上参数代入式(4)、(6),得到tx=1.6 s。
2 自动操纵与报警装置设计
2.1 控制系统硬件组成
如图5所示,该装置主要由信号触发装置、单片机控制器、电动缸操纵机构和蜂鸣器组成。考虑满足功能要求前提下控制系统成本,信号触发装置采用3个接触式常开行程开关,选用STC89C52RC单片机作为控制器,8路数字量输入,6路继电器输出,232接口、485接口可供选择。电动缸操纵机构由12 V XTL系列直流电动缸、滑块和液压阀操作手柄组成,安装在液压缸控制手柄前方。电动缸由12 V直流锂电池供电。蜂鸣器选用BB-116A型、120 dB音质防水抗振金属铁壳报警器。

图5 控制系统构成图Fig.5 Structure block diagram of control system
2.2 基于捆草与卸捆逻辑的控制流程设计
2.2.1正常作业过程分析
根据捆草和卸捆的工作原理,设计控制系统流程图如图6所示。当成捆室满仓,摆臂摆动触发行程开关I时,行程开关Ⅰ向控制器发出信号,控制器控制蜂鸣器连续长音鸣叫,同时检测电动缸推杆是否完全复位,如果没有完全复位,则强制复位。

图6 控制系统流程图Fig.6 Flow chart of control system
当草捆捆扎结束,麻绳被割刀割断时,割刀摆动触发行程开关Ⅱ,行程开关Ⅱ向控制器发出信号,控制器控制电动缸推杆推出,推杆推动滑块,带动液压阀操作手柄摆动,油缸回缩,成捆室后仓门打开,卸捆开始。
当草捆沿落捆缓冲架落地,落捆缓冲架摆动触发行程开关Ⅲ时,行程开关Ⅲ向控制器发出信号,控制器指挥电动缸的推杆复位,使液压阀操作手柄回到初始位置,蜂鸣器停止鸣叫,完成草捆捆扎和卸捆的一个工作循环。
2.2.2系统的故障检测
为了保证系统的可靠性,设计了故障检测功能,蜂鸣器根据不同的故障类型发出不同鸣叫声,便于机手判别系统状态或者检修。
故障检测1:控制器从接收行程开关Ⅰ信号开始计时,到接收触发行程开关Ⅱ信号时,记为时间T1,若T1在设定时间t1内,说明割绳刀切断麻绳后触发了行程开关Ⅱ,系统判定为正常作业。若T1超过设定时间t1,说明行程开关Ⅱ发生故障、割绳刀不能触发行程开关Ⅱ或者行程开关Ⅰ被误触发,蜂鸣器由连续长鸣变为间隔音报警,提示机手装置发生异常,控制器回到初始状态,等待下次正常作业,电动缸操纵机构不动作。
故障检测2:当行程开关Ⅰ和行程开关Ⅱ被正常触发时,控制器从接收行程开关Ⅱ信号开始计时,到接收触发行程开关Ⅲ信号时,记为时间T2,若T2在设定时间t2内,说明草捆沿落捆缓冲架下落,落捆缓冲架摆动触发行程开关Ⅲ,系统判定为正常作业。若T2超过设定时间t2,说明草捆没有落下、行程开关Ⅲ发生故障或者电动缸操纵机构发生故障。蜂鸣器由连续长鸣变为长短音报警,提示机手装置发生异常,控制系统回到初始状态,等待下次正常作业。
2.3 电动缸行程确定
根据小圆捆机结构特点,电动缸被固定在液压阀操作手柄后方圆捆机牵引架上,电动缸的推杆与滑块铰接,滑块套装在液压阀操作手柄上,如图7所示。
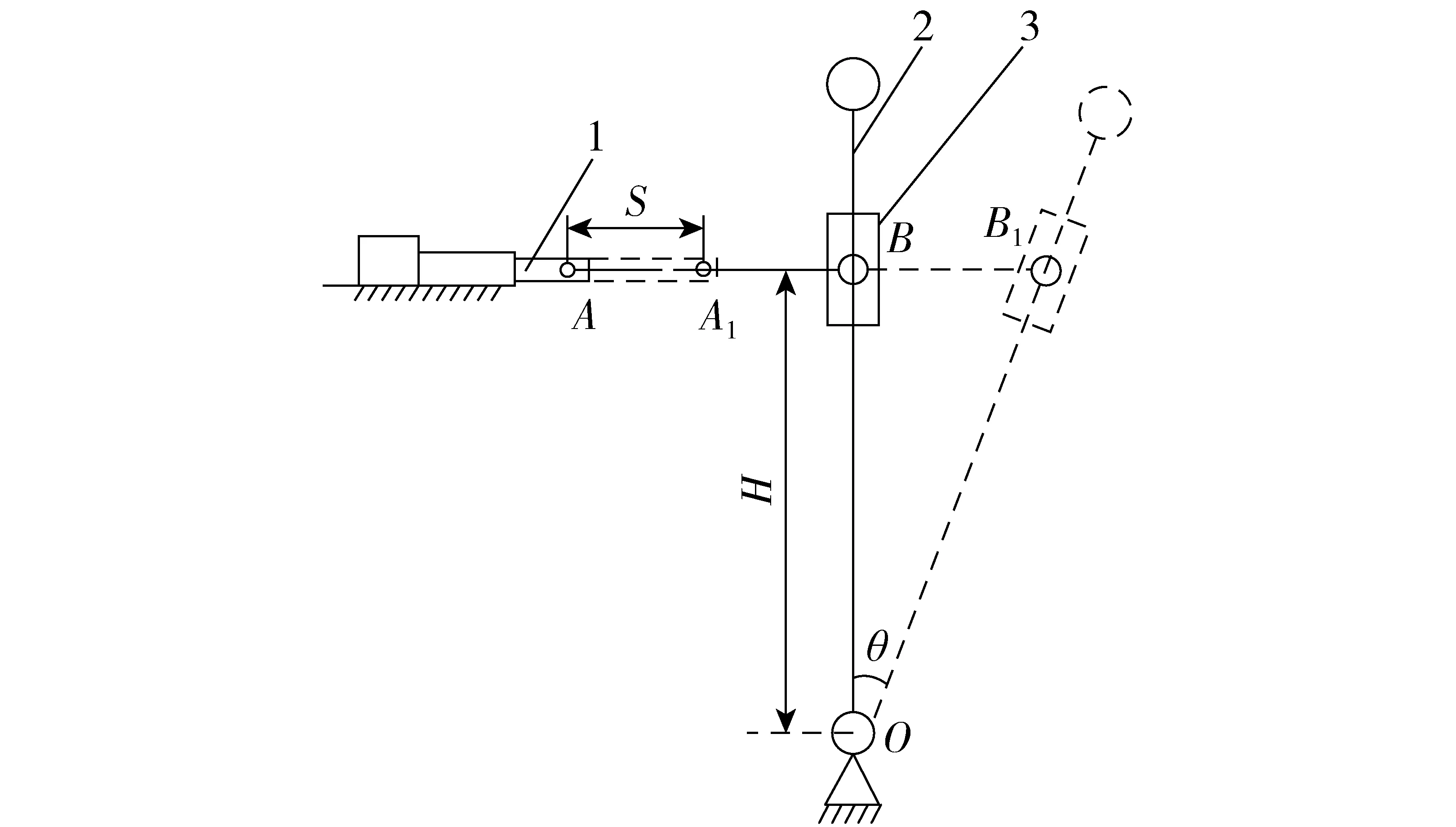
图7 电动缸操纵机构简图Fig.7 Sketch of operation mechanism driven by electric cylinder1.电动缸 2.液压阀操作手柄 3.滑块
液压阀操作手柄摆动过程,滑块水平位移为
lAA1=lBB1=Htanθ
(7)
式中H——电动缸安装位置与液压阀操作手柄底部的竖直距离
θ——液压阀操作手柄摆动的极限角度
经测量H=185 mm,液压阀操作手柄摆动的极限角度θ=15°,将上述参数代入式(7)中得到lBB1=49 mm。据此,电动缸的行程S确定为50 mm。
2.4设定时间t1、t2的确定
设定时间t1、t2是控制器能够快速、有效地判断系统正常作业或者出现故障的依据,从而准确地执行下一步动作。设定时间t1、t2是控制程序设计的关键参数。
设定时间t1是圆捆机正常作业时控制器判断草捆捆扎是否结束的依据。根据设计要求设定时间t1应该大于捆草时间理论计算值,考虑到实际捆草时钢辊转速受拖拉机油门大小的影响会有所波动以及控制程序的故障判断耗时,设定时间t1时增加浮动时间Δt=3 s,将捆扎草捆时间修正为Tk=tk+Δt=11.9 s,设定时间t1取整为12 s。
设定时间t2是控制器判断草捆沿落捆缓冲架落地的依据。根据设计要求设定时间t2应该大于从割绳完成到草捆落地过程的总时间,包括电动缸伸出时间、后仓门打开时间和草捆沿落捆缓冲架下落的卸捆时间,其中卸捆时间tx=1.6 s。根据电动缸技术参数,电动缸的推杆速度为15 mm/s,所以电动缸推杆伸出时间为3.3 s。后仓门的启闭由液压缸活塞杆的伸缩来控制,液压缸活塞杆完全缩回时后仓门完全打开,实测后仓门完全打开时间为2 s。因此,正常作业情况下,从割断麻绳到草捆落地过程的总时间约为t=1.6+3.3+2=6.9 s。考虑到落捆时间计算时忽略下落初速度和下落过程滚动摩擦影响,以及控制程序的故障判断耗时,根据试验设定时间t2=8 s。
3 捆草-卸捆试验
3.1 室内工况模拟试验
按照单片机控制器电路连线要求,将3个行程开关、直流锂电池、电动缸、蜂鸣器与单片机开发板连接,如图8所示。按照该装置的工作原理,模拟小型圆捆机正常作业时该装置的工作情况,验证是否满足设计要求。模拟小型圆捆机和该装置可能出现的故障:行程开关Ⅰ被误触发;行程开关Ⅱ发生故障;草捆未靠自重落下而停留在成捆室内;行程开关Ⅲ发生故障;电动缸操纵机构发生故障。模拟上述5种故障情况来验证报警装置是否给出报警提示以及电动缸能否复位。

图8 系统构成与工况模拟试验Fig.8 System structure and simulation tests of work condition1.锂电池 2.电动缸 3.蜂鸣器 4.行程开关Ⅱ 5.行程开关Ⅲ 6.行程开关Ⅰ 7.单片机开发板
反复模拟上述故障,蜂鸣器能根据模拟的故障,发出不同的报警提醒声音。在非正常操作电动缸未能完全复位的情况下,控制器工作前能够对其进行检测,并强制复位,满足设计要求。
3.2 样机试验
将该装置安装到9JYD-50型小圆捆机上进行场地打捆试验,如图9所示。在地面上条铺0.8 m宽、20 m长、含水率约30%的水稻秸秆,拖拉机牵引小型圆捆机对水稻秸秆进行捡拾打捆试验,拖拉机速度为1.5~2.5 km/h。

图9 样机试验过程Fig.9 Test process of prototype baler
由图9可知,随着拖拉机的前进,圆捆机捡拾器不停地将秸秆捡拾喂入到成捆室,草捆在成捆室内直径不断增大。图9a为秸秆捡拾阶段;图9b为成捆室满仓,摆臂摆动到水平极限位置,机手停车;图9c为捆草结束,电动缸推杆推出;图9d为草捆沿落捆缓冲架落地,完成一个作业循环。重复进行20次场地打捆试验,捆草与卸捆的自动操纵与报警装置能够按照设计要求正常工作。记录每次试验小型圆捆机打一个捆的作业时间t,如表1所示。

表1 小型圆捆机打捆作业试验结果Tab.1 Test results of baling operation of minitype round baler
20次试验的作业时间平均值为43.4 s。原来的作业时间为56~64 s,作业效率提高了22.5%~32.2%。在20次试验中,该装置未出现故障,捆草-卸捆成功率100%。为了进一步考核系统的可靠性,在江苏省海安县隆政村对样机系统进行田间捆扎小麦秸秆的捆草-卸捆自动操纵与报警试验,捆草 500捆未发生行程开关损坏、电动推杆不响应等故障,报警提示音正常,捆草-卸捆成功率100%。
4 结束语
通过分析小型圆捆机捆草与卸捆工作过程,设计了由行程开关、单片机、电动缸操纵机构和蜂鸣器组成的捆草-卸捆自动操纵与报警装置。室内工况模拟试验表明单片机能处理行程开关的触发信号,使电动缸伸缩实现液压阀手柄自动操作卸捆,蜂鸣器在捆草-卸捆过程发出不同节奏的报警提示音,并有效感知行程开关误触发和器件故障,提高了系统可靠性。样机的秸秆捡拾打捆试验表明:设计的捆草-卸捆自动操纵与报警装置可提高小型圆捆机作业效率22.5%~32.2%,捆草-卸捆成功率100%,解决了小型圆捆机捆草和卸捆过程的手动操纵问题,提高了小型圆捆机作业的自动化水平。
1 BORRENI G, BISAGLIA C, TABACCO E.Effects of a new-concept wrapping system on alfalfa round-bale silage[J].Transactions of the ASABE, 2007,50(3):781-787.
2 TAYLOR R K, BLASI D A, SHROYER J P. Storage losses in net-wrapped, large round bales of alfalfa [J].Applied Engineering in Agriculture, 1994,10(3):317-320.
3 华荣江,唐遵峰,叶宏艳,等.国内外圆捆机械研究与发展趋势[J].中国农机化,2012,33(3): 23-26. HUA Rongjiang,TANG Zunfeng,YE Hongyan,et al.Research and development tendency about baler in domestic and overseas[J].Chinese Agricultural Mechanization,2012,33(3): 23-26.(in Chinese)
4 王德成,高东明,王光辉,等. 圆草捆自动缠网装置及自动缠网方法:中国,102232337A[P].2011-11-09.
5 高东明,王德成,王光辉,等. 圆草捆自动缠网装置设计与试验[J/OL].农业机械学报,2012,43(8):99-104.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120819&flag=1. DOI:10.6041/j.issn.1000-1298.2012.08.019. GAO Dongming, WANG Decheng, WANG Guanghui, et al.Self-wrapping net mechanism for round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(8):99-104.(in Chinese)
6 丛宏斌,李汝莘.青贮玉米收获机打捆装置自动控制系统设计[J].农业机械学报,2009,40(11):42-45. CONG Hongbin, LI Ruxin.Design of automatic control system on baling apparatus for ensilage maize combine[J].Transactions of the Chinese Society for Agricultural Machinery,2009, 40(11): 42-45.(in Chinese)
7 任红飞, 郭永, 张欣, 等. 基于工程机械控制器HC-G15的圆捆机电气控制系统设计[J].内蒙古农业大学学报:自然科学版, 2012,33(3):182-185. REN Hongfei, GUO Yong, ZHANG Xin, et al. Electric controlling system design for round bundler based on construction machinery controller HC-G15 [J]. Journal of Inner Mongolia Agricultural University:Natural Science Edition, 2012,33(3):182-185. (in Chinese)
8 肖章, 刘亮东, 王光辉, 等.基于PLC的青贮圆草捆打捆机控制系统设计[J]. 中国农业大学学报, 2013, 18(6):175-179. XIAO Zhang, LIU Liangdong, WANG Guanghui, et al. Control system design of silage round baler based on PLC [J].Journal of China Agricultural University, 2013, 18(6):175-179. (in Chinese)
9 王德福, 蒋亦元, 王吉权. 钢辊式圆捆打捆机结构改进与试验[J]. 农业机械学报, 2010, 41(12):84-88. WANG Defu, JIANG Yiyuan, WANG Jiquan. Structure-improving and experiment of steel-roll round baler [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 84-88. (in Chinese)
10 王春光,敖恩查,邢冀辉,等. 钢辊外卷式圆捆打捆机设计与试验[J]. 农业机械学报,2010,41(增刊):103-106,102. WANG Chunguang, AO Encha, XING Jihui,et al.Design and experiment on round baler with revolute steel roller[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(Supp.):103-106,102. (in Chinese)
11 高东明,王德成,李杰,等. 青饲圆捆机对数螺线式成形装置设计与试验[J]. 农业机械学报,2015,46(7):118-122.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150718&flag=1.DOI:10.6041/j.issn.1000-1298.2015.07.018. GAO Dongming, WANG Decheng, LI Jie, et al. Design and test of logarithmic spiral round baler chamber[J].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):118-122. (in Chinese)12 杜韧,张晗,李丹.圆捆机成型室的试验与研究[J].北华航天工业学院学报,2010,20(5):1-3. DU Ren, ZHANG Han, LI Dan.Experiment and research on forming box of wound bundler[J].Journal of North China Institute of Aerospace Engineering,2010,20(5):1-3.(in Chinese)
13 李叶龙,王德福,李东红,等. 辊盘式圆捆机卷捆机理分析与试验[J/OL]. 农业机械学报,2016,47(12):45-52.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161207&flag=1.DOI:10.6041/j.issn.1000-1298.2016.12.007. LI Yelong, WANG Defu, LI Donghong, et al.Theoretical analysis and experiment of baling mechanism of roll-disk round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):45-52.(in Chinese)
14 雷军乐,王德福,李东红,等. 钢辊式圆捆机旋转草芯形成影响因素分析与优化[J/OL]. 农业机械学报,2015,46(12):18-25.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151203&flag=1.DOI:10.6041/j.issn.1000-1298.2015.12.003. LEI Junle, WANG Defu, LI Donghong, et al.Influence factors and optimization of forming rotary straw core by steel-roll round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(12):18-25.(in Chinese)
15 雷军乐, 王德福, 张全超,等.完整稻秆卷压过程应力松弛试验[J].农业工程学报, 2015, 31(8):76-83. LEI Junle, WANG Defu, ZHANG Quanchao, et al. Experiment on stress relaxation characteristics of intact rice straw during rotary compression [J]. Transactions of the CSAE, 2015, 31(8):76-83. (in Chinese)
16 李汝莘,耿爱军,赵何,等.碎玉米秸秆卷压过程的流变行为试验[J].农业工程学报, 2012, 28(18):30-35. LI Ruxin, GENG Aijun, ZHAO He, et al. Rheologic behavior of chopped corn stalks during rotary compression[J]. Transactions of the CSAE, 2012, 28(18): 30-35. (in Chinese)
17 房欣, 陈海涛, 黄振华, 等.不同含水率大豆秸秆与不同材料间滑动摩擦特性的研究[J].大豆科学,2012,31(5):838-841. FANG Xin, CHEN Haitao, HUANG Zhenhua, et al. Sliding friction characteristic of different moisture content of soybean stalk with different materials[J].Soybean Science, 2012, 31(5): 838-841. (in Chinese)
18 王琛, 黄东明, 周益君, 等. 9YY-550型小型秸秆捡拾圆捆机的设计[J].中国农机化, 2008,29(4):67-68. WANG Chen, HUANG Dongming, ZHOU Yijun, et al. Design on the model 9YY-550 mini type rotary baler for straw [J]. Chinese Agricultural Mechanization, 2008,29(4):67-68. (in Chinese)
19 任亨斌, 宁先雄.实现急回运动且传动性能最优的机构综合[J].机床与液压, 2005(4): 63-64. REN Hengbin, NING Xianxiong.Optimal synthesis of four-bar linkage with both quick-return characteristics and maximum transmission angle [J]. Machine Tool & Hydraulics, 2005(4): 63-64. (in Chinese)
20 中国农业机械化科学研究院.农业机械设计手册:下册[M].北京: 中国农业科学技术出版社,2007.
DesignofAutomaticManipulationandAlarmingDeviceofStraw-bundlingandBale-unloadingofMinitypeRoundBaler
YIN Jianjun WU Qibin CHEN Yonghe WANG Xinxin
(KeyLaboratoryofModernAgriculturalEquipmentandTechnology,MinistryofEducation,JiangsuUniversity,Zhenjiang212013,China)
In view of the problem that the driver frequently turns round to observe and manually operate the baler during the process of straw-bundling and bale-unloading of minitype round baler, an automatic manipulation and alarming device was developed. The device mainly consisted of three travel switches as a singlechip, an operation mechanism driven by electric cylinder and a buzzer. By analyzing the working process of straw-bundling and bale-unloading, three travel switches were used to detect whether straw was filled with bale chamber, straw-bundling motion finished and the bale fell to the ground from bale chamber. The control flow of straw-bundling and bale-unloading was designed, and the control parameters of straw-bundling time and bale-unloading time were determined. Simulation tests of indoor working condition showed that the single chip could process the trigger signal of three travel switches to make electric cylinder stretch out and draw back, and the hydraulic valve handle was driven by the operation mechanism to realize automatic bale-unloading. The buzzer made different rhythm of the alarm sound during the process of straw-bundling and bale-unloading to effectively detect spurious triggering of travel switches and parts fault, which improved the reliability of the system. The pick-up and baling tests of prototype baler showed that the device may improve the working efficiency of minitype round baler by 22.5% to 32.2%, and the success rate of straw-bundling and bale-unloading may reach 100%.
minitype round baler; straw-bundling; alarming device
S225.2+2; TP391.9
A
1000-1298(2017)09-0096-06
10.6041/j.issn.1000-1298.2017.09.012
2017-01-24
2017-02-24
国家自然科学基金项目(51375215)、镇江市重点研发计划项目(NY2015009)和江苏高校优势学科建设工程项目(苏政办发(2014)37号)
尹建军(1973—),男,研究员,博士,主要从事收获机械集成设计和农业机器人技术研究,E-mail: yinjianjun@ujs.edu.cn
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
内江科技(2022年4期)2022-05-11
装备制造技术(2020年11期)2021-01-26
环球市场(2021年11期)2021-01-15
电脑报(2020年12期)2020-06-30
新商务周刊(2019年24期)2019-12-22
电子制作(2018年11期)2018-08-04
数码世界(2018年6期)2018-07-12
汽车维护与修理(2016年10期)2016-07-10
科普童话·百科探秘(2015年5期)2015-05-26