被动滚筒式免耕播种成穴机构设计与试验
2017-10-11 01:33:48刘宏新闻浩楠改广伟唐师法
农业机械学报 2017年9期
刘宏新 闻浩楠 改广伟 唐师法
(东北农业大学工程学院, 哈尔滨 150030)
被动滚筒式免耕播种成穴机构设计与试验
刘宏新 闻浩楠 改广伟 唐师法
(东北农业大学工程学院, 哈尔滨 150030)
针对传统免耕播种机在作业时需对秸秆及残茬进行剪切或移除,从而存在对切割部件性能要求高、功耗大、扬尘以及秸秆缠绕堵塞等问题,研究一种滚筒穴式免耕播种成穴机构,实现在不对地表覆盖物进行任何专门处理的情况下穿透成穴。核心机构由鸭嘴滚轮排种装置和由其鸭嘴驱动的被动式滚筒组成,二者处于内相切关系。转动的滚筒将秸秆碾压成一薄层,鸭嘴从滚筒内伸出并穿透这一秸秆薄层后进行成穴并投放种子。基于运动学分析,建立鸭嘴驱动角φ、鸭嘴助力角α、鸭嘴滚轮排种装置的角速度ω0、滚筒角速度ω1之间的数学模型。对于100 mm整数倍株距的播种情况,运用Matlab(Matrix laboratory)图像处理模块对方程进行分析,以结构及工作要求为约束条件,以滚筒转速波动平缓为主要衡量指标,结构紧凑为辅助衡量指标,优化得出鸭嘴滚轮排种装置半径为200 mm,滚筒半径为400 mm,鸭嘴助力角α为23°,初始驱动角φ为31°,进一步的几何分析计算得出滚筒上设置的驱动孔个数为23个,尺寸为84 mm×32 mm。运用CATIA进行数字样机运动仿真,分析滚筒在鸭嘴驱动下实际情况和角速度的变化规律,验证了理论分析。样机试验表明被动滚筒式免耕播种成穴机构满足设计要求,工作过程简单可靠,为免耕播种提供了一种有效的技术手段。
免耕播种; 成穴机构; 被动滚筒; 运动学分析; 仿真
引言
近年来,保护性耕作技术的推广应用,对农机具的工作性能提出了新的要求[1-4]。现有的免耕播种机为保证种子顺利下播,采用圆盘切刀切断秸秆(根茬),切开覆盖层,开出缝隙,从而方便作业部件顺利通过,这种方式增加了功耗,同时对垂直载荷要求较大,当破茬不完全时,可能从土壤中带出整个残茬,影响播种质量[5-7],并且对秸秆适应量有限。另一种方式是将秸秆层移除,清理出无覆盖层的播种条带,清秸覆秸的过程会消耗一定功耗,同时在湿度小于35% 的条件下,会扬起土壤,引起环境污染[8-14]。
针对上述问题,文献[15]提出一种穴式免耕播种方式。相对于现有形式,无需对秸秆残茬进行任何处理,不进行破茬分草和开沟等工序,避免了秸秆和杂草的堵塞。
目前,关于穴式免耕播种的报道较少,相关研究多为原理类似的滚轮式膜上打孔精量播种机,应用在铺膜打孔穴播作物上[16],不适于秸秆覆盖的恶劣地表状态。
本文提出一种新的免耕播种形式,研究一种以滚筒为核心部件的免耕成穴机构,采用滚筒碾压秸秆,在秸秆被压薄并固定时,置于滚筒内的鸭嘴式播种器的鸭嘴从滚筒中伸出,穿透秸秆完成打穴与播种,以减少对土壤及地表覆盖物的扰动及作业工序,降低功耗,提高可靠性与适应性。
1 成穴机构结构与工作原理
1.1 总体结构
成穴机构总体结构如图1所示,由滚筒、鸭嘴滚轮排种装置、机架、挡孔板、3个链轮、传动轴、种箱和输种管组成。鸭嘴滚轮排种装置放置在滚筒内部,两者处于内相切的位置关系。
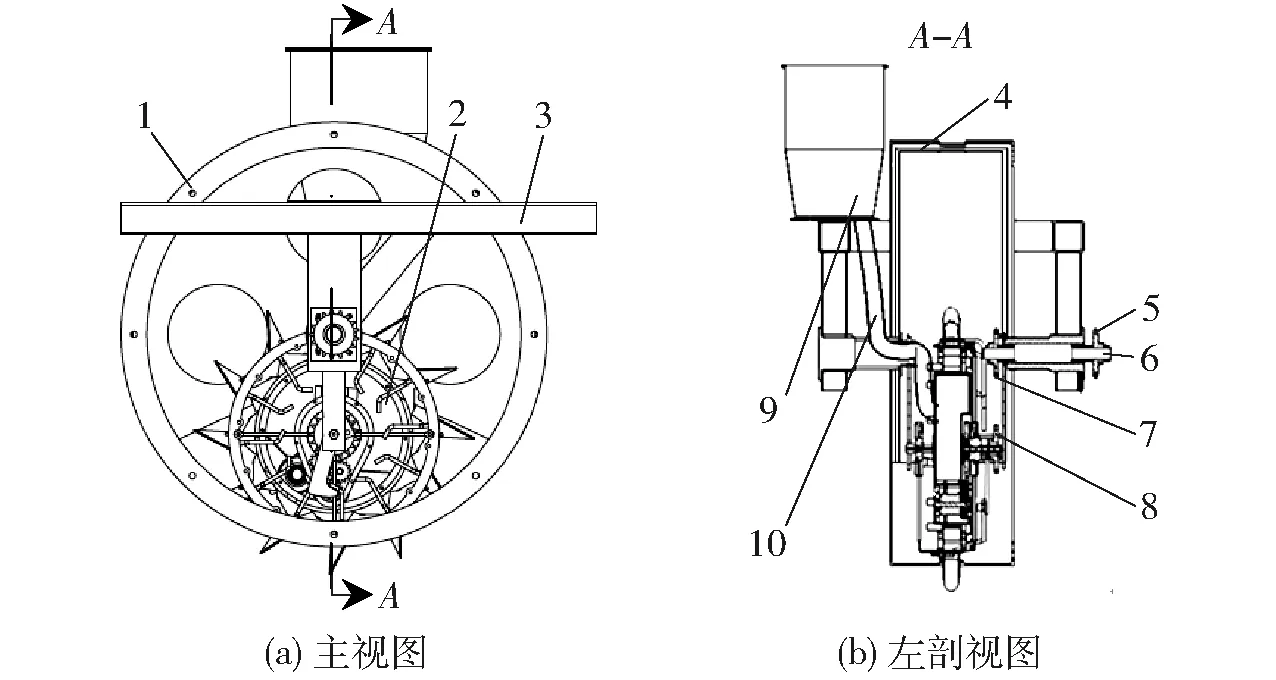
图1 成穴机构结构简图Fig.1 Structural diagram of cavitation mechanism1.滚筒 2.鸭嘴滚轮排种装置 3.机架 4.挡孔板 5.链轮1 6.传动轴 7.链轮2 8.链轮3 9.种箱 10.输种管
1.2 成穴机构工作原理
作业时,拖拉机牵引成穴机构前进,地轮通过链传动将动力传递给链轮1,链轮1通过传动轴带动链轮2转动,链轮3与鸭嘴滚轮排种装置固连在一起,链轮2通过链传动将动力传递给链轮3,从而带动鸭嘴滚轮排种装置转动。滚筒的转动动力则依靠鸭嘴滚轮排种装置上的鸭嘴拨动滚筒上设置的驱动孔及滚筒与地面间的摩擦力产生。转动的滚筒将秸秆碾压成一薄层,鸭嘴穿透这一薄层秸秆后进行成穴并投放种子。
挡孔板与机架固定,用以遮挡无鸭嘴伸出的滚筒驱动孔,防止滚筒碾压秸秆过程中秸秆进入滚筒;种子放置在种箱中,种箱和鸭嘴滚轮排种装置中的种盒通过输种管伸入滚筒内部将两者连接,种子通过重力的作用从种箱经输种管进入鸭嘴滚轮排种装置中。
限于鸭嘴成穴的基本工作原理,该机构在工作速度的进一步提高以及株距的多级或无级可调节方面有其局限性,但鉴于普通鸭嘴式穴播器仍有其存在的空间及保有量,本设计在一般场合下兼具穴播与免耕的优点,有其存在的市场价值与技术意义。
2 鸭嘴滚轮排种装置设计
2.1 结构
鸭嘴滚轮排种装置结构如图2所示[17]。该机构由动力齿轮、介齿轮、鸭嘴开启杆、接种杯、鸭嘴、种盒、外壳、中心轴、鸭嘴控制器、清种毛刷驱动齿轮、排种盘、排种盘驱动轮和挡杆组成。
其中种盒与中心轴同心连接,鸭嘴控制器固定在中心轴上,动力齿轮、外壳、鸭嘴和鸭嘴启动杆依次连接,接种杯均匀安装在鸭嘴滚轮排种装置外壳内侧,挡杆均匀安装在接种杯一侧,排种盘安装在种盒内,且与排种盘驱动轮同轴连接,动力齿轮与介齿轮相啮合,介齿轮与清种毛刷驱动齿轮相啮合。
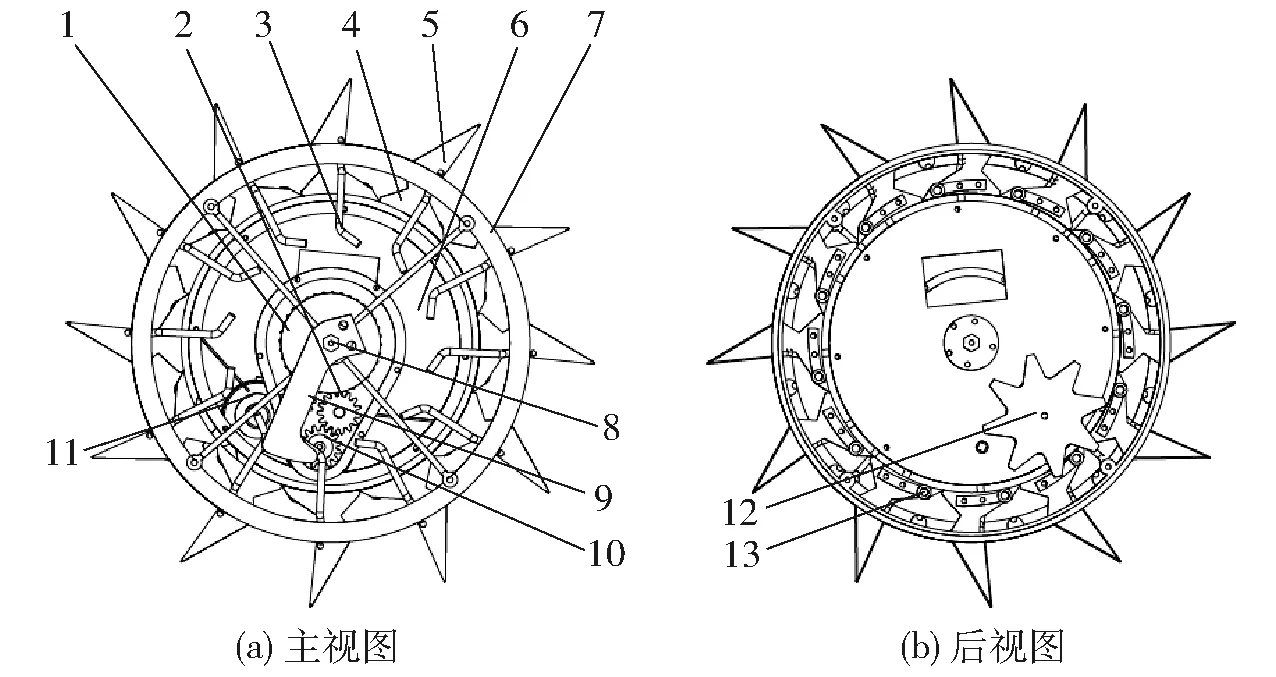
图2 鸭嘴滚轮排种装置结构图Fig.2 Structure diagram of duck-billed roller mechanism1.动力齿轮 2.介齿轮 3.鸭嘴开启杆 4.接种杯 5.鸭嘴 6.种盒 7.外壳 8.中心轴 9.鸭嘴控制器 10.清种毛刷驱动齿轮 11.排种盘 12.排种盘驱动轮 13.挡杆
2.2 工作原理
工作时,中心轴和种盒固定不动,动力齿轮驱动鸭嘴滚轮排种装置外壳绕种盒转动,挡杆在转动到特定位置时拨动排种盘驱动轮转动某一角度,排种盘同步转动,使得排种盘窝眼中种子落入接种杯进而落入鸭嘴,此时随外壳转动的鸭嘴开启杆与固定的鸭嘴控制器相对位置发生变化使得鸭嘴打开进行排种,而鸭嘴控制器与鸭嘴启动杆接触端采用变径滚轮控制,鸭嘴在出土一定角度后再关闭,确保鸭嘴不夹带土壤,从而完成一次播种作业过程,随着动力齿轮驱动,鸭嘴滚轮排种装置持续滚动,重复上述播种过程,而整数倍株距调节可通过间隔性地封闭接种杯和改变相邻鸭嘴开启杆结构位置来实现。
工作过程中动力齿轮带动清种毛刷驱动齿轮同向转动,种子在种盒中由于重力原因覆盖在排种盘上,排种盘与清种毛刷相向转动,清种毛刷将窝眼外多余的种子扫落。
2.3 参数分析
2.3.1基本参数
鸭嘴滚轮排种装置的半径取值一般在180~240 mm范围内[18]。
对于大田精量点播作物,本文以株距L为100 mm的整数倍进行设计[19]。考虑到简化加工工艺等问题,鸭嘴的个数x一般选偶数,本文选取x=12。根据上述已知参数,计算后对结果圆整,得出鸭嘴滚轮排种装置的半径R0=200 mm。
2.3.2鸭嘴结构参数
为适应不同农作物种子尺寸要求,设计鸭嘴与鸭嘴滚轮排种装置连接部分的截面尺寸为45 mm×30 mm,如图3a所示。
鸭嘴与鸭嘴滚轮排种装置外壳通过螺栓连接,其高度H应同时满足鸭嘴伸出滚筒后能穿透由滚筒压薄的秸秆层并达到要求的播种深度,如图3b所示,故鸭嘴高度H为
H=h1+h2+h3
(1)
式中h1——播种深度,取50 mm[20]h2——已被滚筒压薄秸秆的厚度,根据全量还田试验取38 mm
h3——滚筒厚度,取2 mm
因此设计H=90 mm。
α′为鸭嘴前角,取值范围为0°~8°[21]。α为鸭嘴助力角,工作时由其驱动滚筒,根据鸭嘴底截面尺寸、鸭嘴高度及鸭嘴前角α′取值范围,初定鸭嘴助力角α取值范围为19°~27°。
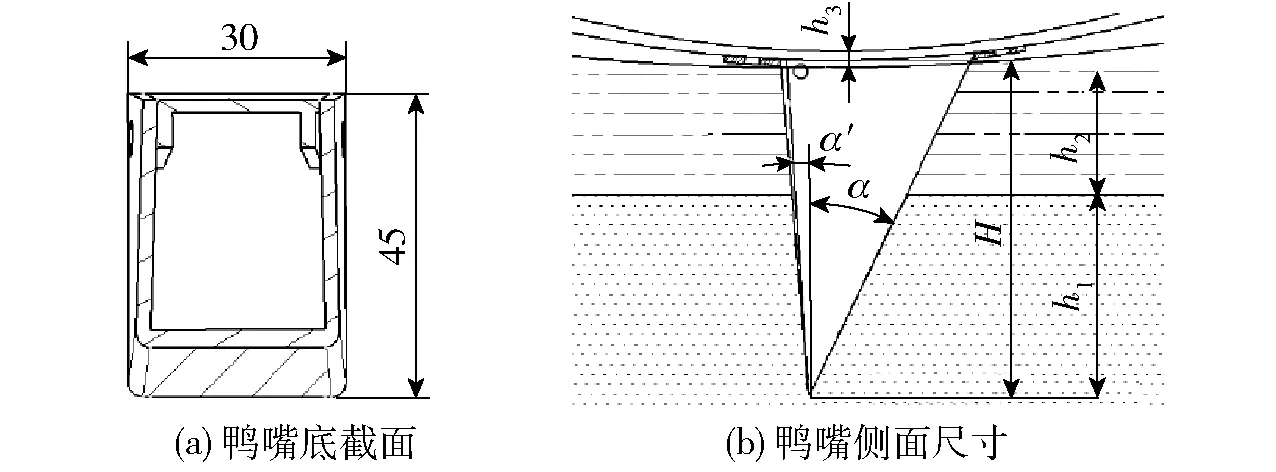
图3 鸭嘴结构Fig.3 Duck mouth structure
鸭嘴和鸭嘴滚轮排种装置接触的截面宽度设计为BJ=30 mm,考虑到鸭嘴滚轮排种装置的内部零件布局,其左右外壳的宽度设计为BL=32 mm,BR=14 mm,鸭嘴与鸭嘴滚轮排种装置外壳的距离设计为S=10 mm,计算可得鸭嘴滚轮排种装置厚度P=96 mm,鸭嘴滚轮排种装置外壳布局如图4所示。
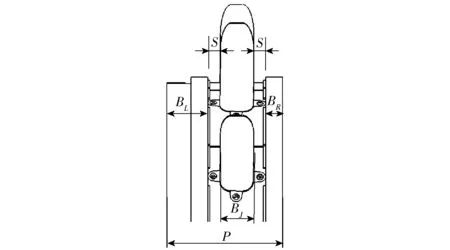
图4 鸭嘴滚轮排种装置外壳布局Fig.4 Shell layout of duck mouth roller metering device
3 成穴机构运动机理
3.1 相关参数
在鸭嘴滚轮排种装置半径R0=200 mm,鸭嘴高度H=90 mm,且鸭嘴滚轮排种装置与滚筒内相切的情况下,为保证合理装配并考虑滚筒能够有效碾压秸秆,防止秸秆缠绕堵塞现象产生,选择滚筒半径R1=400 mm。
现建立如图5所示的成穴机构运动分析图,鸭嘴滚轮排种装置的转动中心处于O点,滚筒的转动中心处于O1点,鸭嘴滚轮排种装置的角速度ω0恒定。
滚筒的转动动力主要源于鸭嘴滚轮排种装置上的鸭嘴对滚筒上设置的驱动孔的拨动,驱动孔需保证鸭嘴在驱动滚筒过程中不与滚筒发生干涉。由于鸭嘴滚轮排种装置与滚筒之间处于内相切的关系,因此在鸭嘴驱动滚筒过程中,其留在滚筒内部的长度是不断变化的,即滚筒角速度ω1在驱动过程中不断变化,而在下一鸭嘴驱动时又会增大到初始驱动速度。为保证滚筒运转平稳,设置鸭嘴驱动边AB(A为鸭嘴端点;B为沿鸭嘴与滚筒接触的斜边的延长线与O1O延长线的交点)相对基准线OA具有一定角度(即助力角α),以减缓鸭嘴伸出滚筒即驱动半径lOM减小造成的滚筒速度降低。因此合理的鸭嘴助力角α和驱动孔设置是保证机具平稳工作的关键。
3.2 滚筒角速度分析
免耕播种机作业速度范围一般为1~2 m/s,根据保护性耕作对免耕播种机作业速度要求,参考普通鸭嘴式穴播器的作业速度,选取成穴机构作业速度范围1.0~1.5 m/s[22]。当鸭嘴滚轮排种装置角速度ω0一定时,分析不同鸭嘴助力角α时,滚筒角速度ω1随驱动角φ的变化关系。
当鸭嘴拨动滚筒转动时,鸭嘴与滚筒接触点是不断变化的,现取M为任意情况下驱动鸭嘴与滚筒接触点,如图5所示,则可通过M点计算滚筒角速度为
(2)
由图5可知,接触点M的绝对速度va由其相对鸭嘴滚轮排种装置中心O的牵连速度ve和相对鸭嘴助力角驱动面的相对速度vr合成。随着鸭嘴滚轮排种装置的转动,M点位置不断变化,当M点与竖直线O1O重合时,其相对速度vr为0,当鸭嘴滚轮排种装置继续转动时,M点相对速度vr方向反转,因此需分两种情况分别讨论M点相对速度vr方向不同时,滚筒角速度ω1随鸭嘴助力角α和驱动角φ(驱动鸭嘴顶点A和鸭嘴滚轮排种装置中心O的连线与竖直方向的夹角,统一简化表述为驱动角)的变化关系。
当M点位于滚筒左侧时,以点M为动点,以鸭嘴为动系,建立运动方程
va=vrsinψ+vesinλ
(3)
vrcosψ=vecosλ
(4)
ve=ω0lOM
(5)
式中λ=∠CMD,ψ=∠O1MB(C为O1M延长线上任意一点,DM垂直OM)。
根据余角性质可知,∠O1MO=∠FMD(FM垂直O1M),则∠O1MO=π/2-λ,在△O1OM中,由余弦定理可得

(6)
则λ可表示为
(7)
在△OMB中,∠OMB=∠O1MB-∠O1MO=ψ-π/2+λ,由正弦定理可得
(8)
根据图5中所示的位置关系,在△MBO中,由余弦定理可得

(9)
在△ABO中,lOA=R0+H,根据正弦定理可得
(10)
则
(11)
在△MBO1中,由正弦定理可得
(12)
将式(10)~(12)代入式(9)可得

(13)
整理上述公式可得
(14)
当M点位于滚筒右侧时,分析过程及公式与M点位于滚筒左侧时相似,这里不作赘述,直接给出结果,lOM和滚筒角速度ω1分别表示为

(15)

(16)
3.3 鸭嘴助力角对滚筒角速度影响分析
运用Matlab软件对式(14)、(16)进行分析可知,成穴机构作业速度不同,滚筒角速度ω1变化范围不同,但驱动角φ和鸭嘴助力角α对滚筒角速度ω1的影响规律相同,因此可在合理作业速度区间内任选某一速度,本文以1 m/s(即鸭嘴滚轮排种装置角速度5 rad/s)为例,分别对鸭嘴助力角可能的取值(19°~27°)进行分析,同时截取滚筒角速度ω1变化相对平缓区间进行具体分析,得出滚筒角速度ω1随驱动角φ的变化规律,如图6所示。为方便观察,驱动角单位在生成图像时已转换为度。
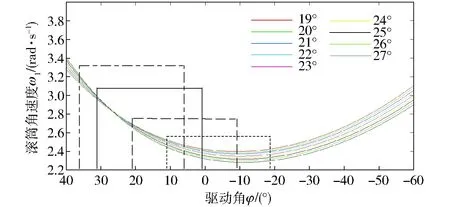
图6 驱动角φ和鸭嘴助力角α对滚筒角速度的影响规律Fig.6 Drive angle φ and duckbill power angle α influence law on roller angular velocity
从图6中可以看出,在一定驱动角φ区间内,不同的鸭嘴助力角α对滚筒角速度ω1的变化幅度影响不同,结合图5可以发现,鸭嘴在某一驱动角φ开始驱动滚筒,直至另一驱动角φ′(φ′=φ-30°)停止驱动滚筒,即由下一鸭嘴接替驱动滚筒,有效作用区间为鸭嘴角间距30°。
在图6中可以划分若干区间为30°的曲线段,此区间即为鸭嘴驱动滚筒时滚筒角速度ω1的变化曲线。为保证鸭嘴依次驱动滚筒,要求鸭嘴初始驱动角φ对应的滚筒角速度ω1大于鸭嘴停止驱动角φ′对应的滚筒角速度ω′1;且需保证鸭嘴交替驱动后相同时间内失去驱动的鸭嘴相对滚筒的角位移小于当前驱动鸭嘴相对滚筒的角位移,进而避免失去驱动的鸭嘴与滚筒重新碰撞发生二次驱动;在所有满足要求的参数中,以滚筒角速度ω1变化平缓为主要衡量指标,以鸭嘴结构紧凑为辅助衡量指标,确定最佳的鸭嘴助力角α;根据上述需求给出鸭嘴助力角度分析流程图,如图7所示。
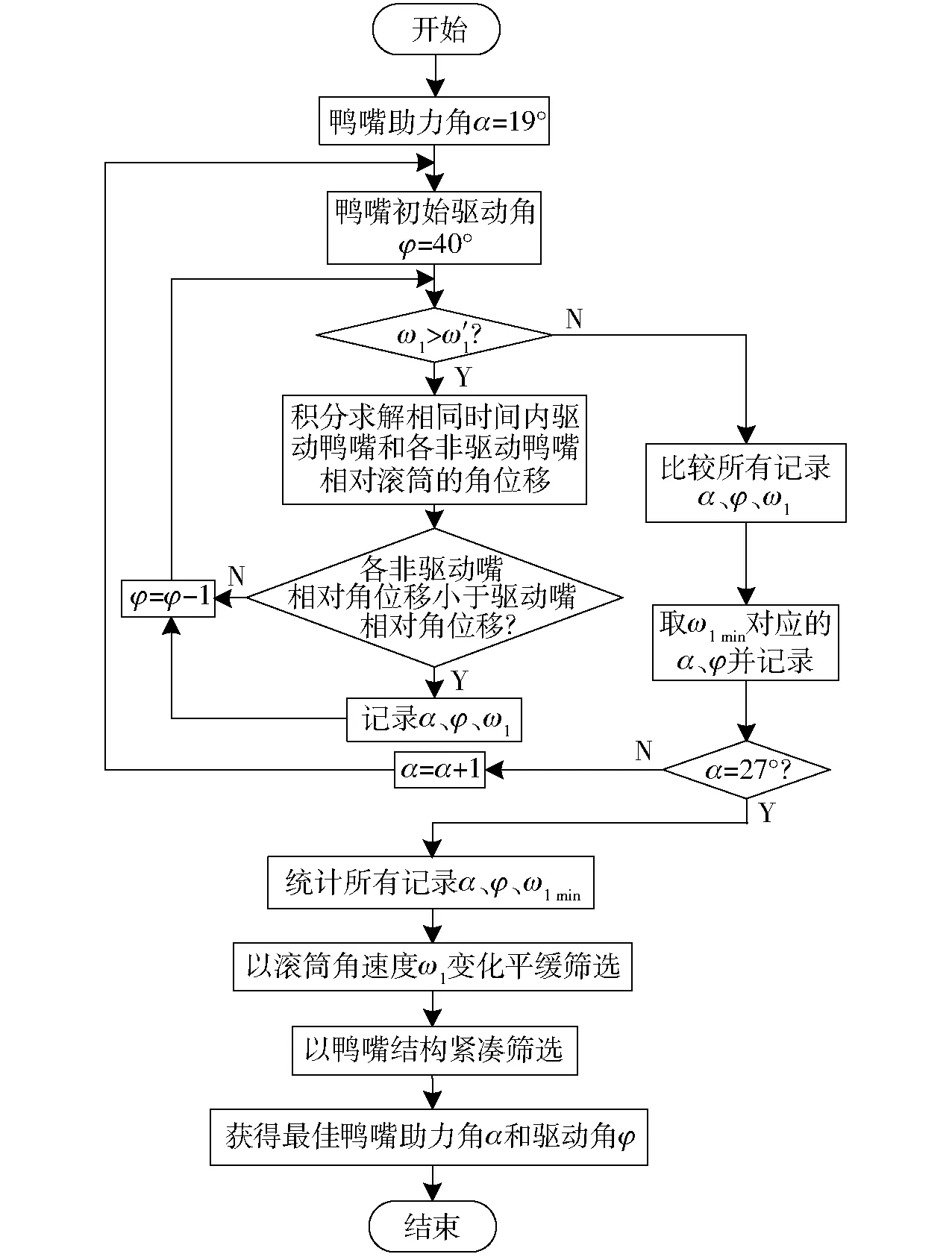
图7 鸭嘴助力角度分析流程图Fig.7 Flow chart of duckbill angle analysis
经上述流程图分析最终可以确定最佳的鸭嘴助力角α=23°,进而得出鸭嘴前角α′=5°,鸭嘴初始驱动角φ=31°,即鸭嘴合理驱动区间为31°~1°。
3.4 驱动孔个数确定
任取某一鸭嘴交替驱动滚筒位置建立滚筒和鸭嘴滚轮排种装置的位置关系,如图8所示。
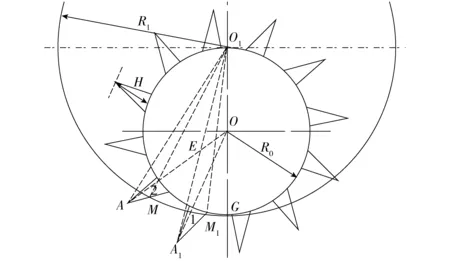
图8 几何位置关系Fig.8 Geometric position relationship
图8中1号鸭嘴为当前驱动鸭嘴,2号鸭嘴为即将驱动鸭嘴,即两鸭嘴必然处于各自驱动孔内,令M1点为1号鸭嘴在驱动孔中与滚筒的接触点,M点为2号鸭嘴在驱动孔中与滚筒的接触点,则∠MO1M1即为理论上在滚筒上设置相邻2个驱动孔的角间距。
图8中已知参数有:鸭嘴角间距为θ=30°,鸭嘴助力角α=∠OAM=∠OA1M1,驱动角φ=∠AOG,滚筒半径lO1M=lO1M1=R1,鸭嘴顶点距鸭嘴滚轮排种装置中心距离lOA=lOA1=R0+H,偏心距为lOO1。直线O1A1与直线OA相交于E点。
在△OO1A1中,∠A1OO1=π-φ+θ,根据三角形余弦定理有

(17)
设∠O1A1O=β,根据正弦定理有

(18)
∠O1A1O可求,则∠OO1A1=φ-θ-β可求,在△O1A1M1中∠O1A1M1=β+α,设∠A1M1O1=γ,根据三角形正弦定理有
(19)
∠A1M1O1可求,则∠M1O1A1=π-(β+α)-γ。
在△O1AO中,∠AOO1=π-φ,根据三角形余弦定理有

(20)
设∠O1AO=β′,再根据正弦定理有
(21)
∠O1AO可求,∠O1AM=β′+α,设∠AMO1=γ′,在△O1AM中根据正弦定理有
(22)
∠AMO1可求,∠MO1A=π-(β′+α)-γ′。
在△O1AE中,∠AEO1=∠A1EO=π-θ-β,∠EO1A=θ+β-β′。设∠MO1M1=δ′,则∠MO1M1=δ′=∠EO1A-∠MO1A+∠M1O1A1=θ+γ′-γ,即理论上滚筒驱动孔角间距∠MO1M1可知。
根据滚筒驱动孔角间距可求得滚筒驱动孔个数

(23)
n不为整数时可圆整为n′,进而重新计算滚筒驱动孔角间距δ,得

(24)
综上,将鸭嘴助力角α=23°、鸭嘴初始驱动角φ=31°代入上述公式,通过几何分析最终可以得出δ′=15.66°,n=22.98,通过圆整取滚筒驱动孔个数n′=23,即滚筒驱动孔角间距δ=15.65°。
3.5 滚筒驱动孔尺寸分析
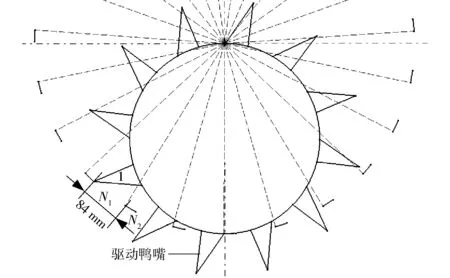
图9 驱动孔弦长与鸭嘴位置关系示意图Fig.9 Schematic diagram of position relationship between drive hole chord length and duckbill
驱动孔为矩形长孔,若其尺寸过小则可能阻碍鸭嘴伸出滚筒,鸭嘴滚轮排种装置易损坏。若驱动孔尺寸过大,在工作过程中,杂物易通过驱动孔进入滚筒中,并会伴随产生堵塞现象,影响机具正常工作。所以必须合理选择驱动孔尺寸。根据已经确定的最佳参数,在CATIA软件中创建滚筒和鸭嘴滚轮排种装置的草图,并约束位置关系,任取某一鸭嘴驱动边与滚筒驱动孔作用点相合约束,并将此鸭嘴初始驱动角φ通过角度约束调整为31°,驱动该角度进行草图动画,驱动区间为31°~1°,观察其他鸭嘴与滚筒圆周交点距其所在驱动孔作用点横弦长变化,最终确定最大横弦位置在鸭嘴最初进入滚筒时刻,由此建立驱动孔弦长与鸭嘴间位置关系,如图9所示,图中1号鸭嘴所处位置对应横弦长最大。
图9中,任意相邻两条虚线的夹角,表示相邻两驱动孔间的角间距。设1号鸭嘴顶点与滚筒圆周相交于N1点,1号鸭嘴所在驱动孔作用点为N2,则圆弧N1N2所对应的弦长即为在滚筒上所设置的驱动孔的合理弦长,通过测量得出驱动孔的弦长为83.943 mm,最终圆整确定驱动孔的弦长为84 mm,以N2点为基准,在滚筒上开出23个弦长为84 mm的驱动孔,如图9所示。本文所设计的鸭嘴最大宽度为30 mm,在鸭嘴的宽度方向上,左右分别给鸭嘴留出1 mm的间隙,以便于鸭嘴成穴,所以驱动孔的尺寸设计为84 mm×32 mm。
4 仿真分析
4.1 运动机构建立
创建成穴机构简化模型,为仿真需要,需添加一个辅助零件作为固定件,并在固定件中创建两条距离为200 mm的轴线,模型如图10所示。通过在鸭嘴与滚筒间设置的约束条件,使鸭嘴拨动滚筒转动,具体仿真建立及操作流程如图11所示。
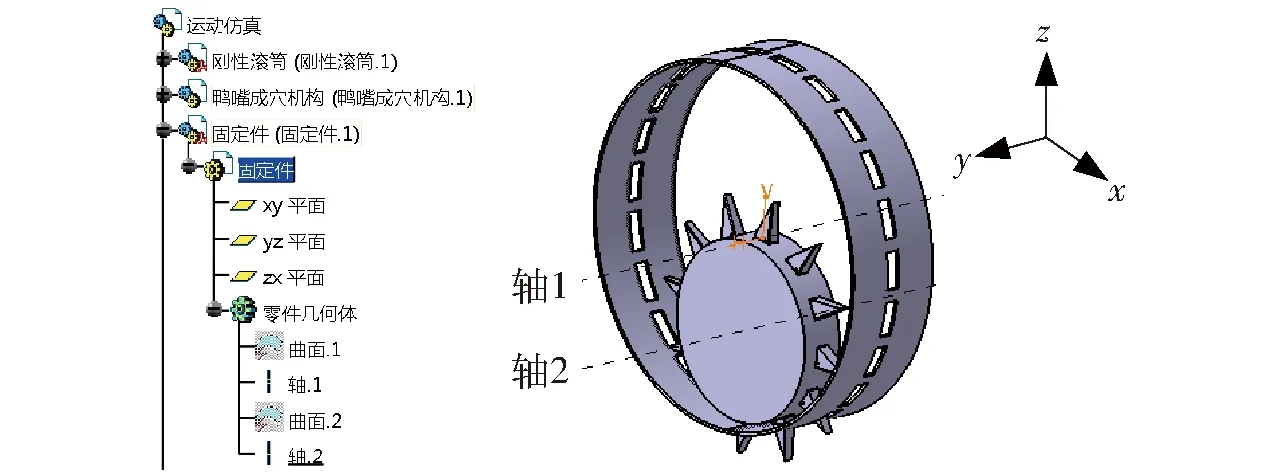
图10 创建辅助零件Fig.10 Creating auxiliary part
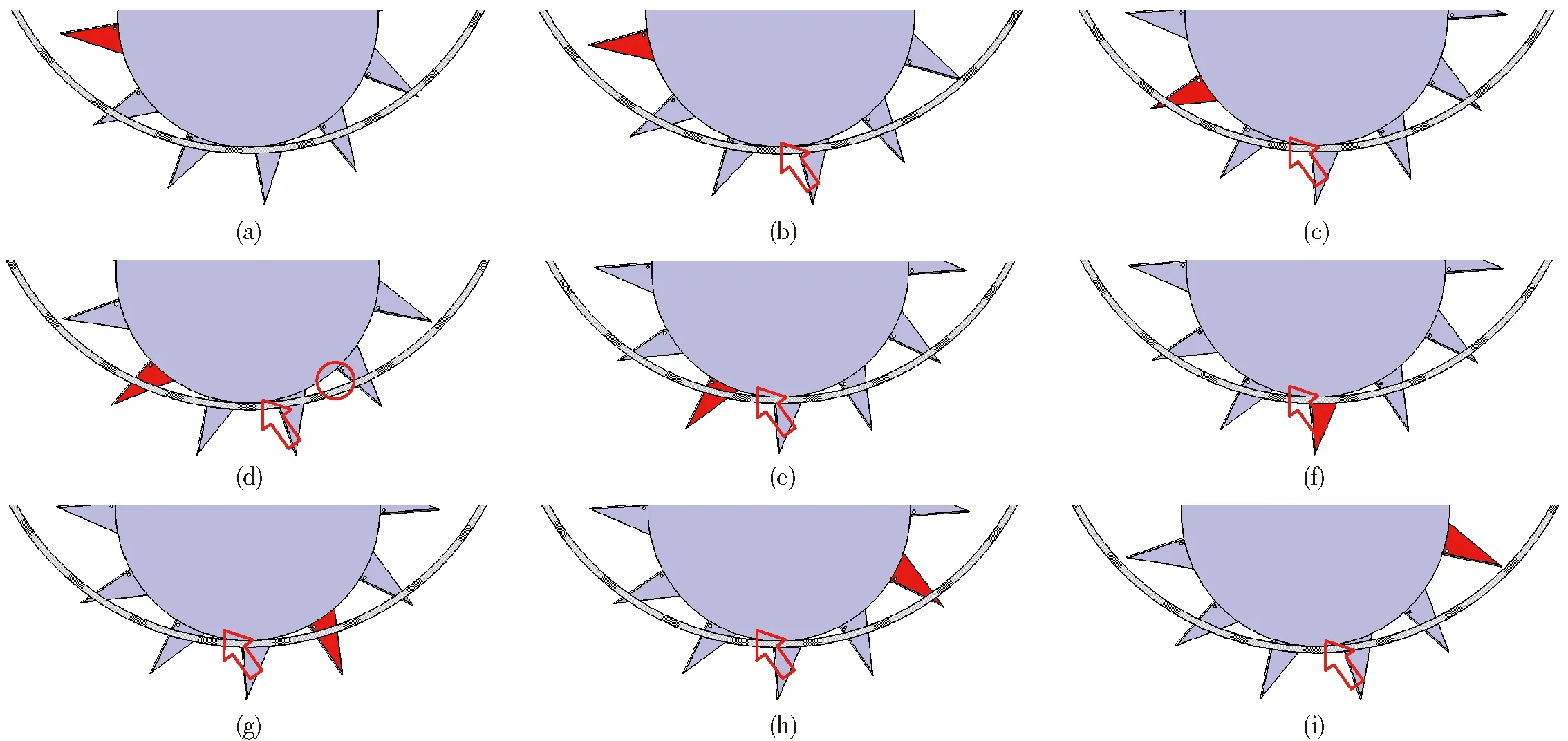
图12 仿真结果Fig.12 Simulation result
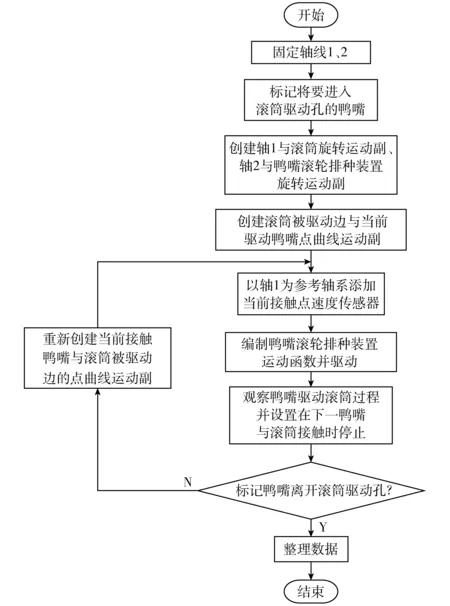
图11 运动机构建立及仿真流程图Fig.11 Flow chart of movement mechanism establishment and simulation
4.2 仿真结果及分析
根据上述过程,得到仿真结果如图12所示。图中红色箭头所指处为驱动鸭嘴与滚筒上设置的驱动孔的接触点,即驱动鸭嘴与滚筒驱动孔接触边。为方便观察,截图时对滚筒圆周进行了加厚处理。
从图12中可以观察到被标记的鸭嘴(红色)从进入滚筒上设置的驱动孔至离开滚筒上设置的驱动孔的整个过程。首先,调整所有鸭嘴与滚筒孔之间都处于无接触,状态如图12a所示;驱动鸭嘴滚轮排种装置,当某一鸭嘴与滚筒孔接触时,开始驱动滚筒运动,状态如图12b所示;继续运动,至下一个鸭嘴与滚筒接触,状态如图12c所示,此时为鸭嘴交替驱动时刻,进而继续运动使得之前拨动滚筒转动的鸭嘴与滚筒上的驱动孔分离,状态如图12d所示,鸭嘴拨动滚筒转动的过程如图12c~12e,依次循环。
通过编制不同的鸭嘴滚轮排种装置运动函数即分别以不同的鸭嘴滚轮排种装置角速度ω0进行仿真,得到仿真数据结果,截取相同时间段,利用Excel生成不同鸭嘴滚轮排种装置角速度ω0下滚筒角速度ω1随时间的变化规律,如图13所示。

图13 滚筒角速度变化曲线Fig.13 Changing curves of roller angular velocity
从图13中可以看出,当鸭嘴开始驱动滚筒时,滚筒角速度最大,在下一个鸭嘴驱动滚筒之前,滚筒角速度呈先下降再平缓趋势,直至下一个鸭嘴驱动滚筒,鸭嘴滚轮排种装置角速度ω0越小,滚筒角速度ω1变化越平稳。
5 样机试验
5.1 三维模型与试验样机
使用CATIA软件根据所求得的结构参数,创建单行被动滚筒式免耕播种成穴机构试验装置的三维模型,并加工试验样机,如图14所示。
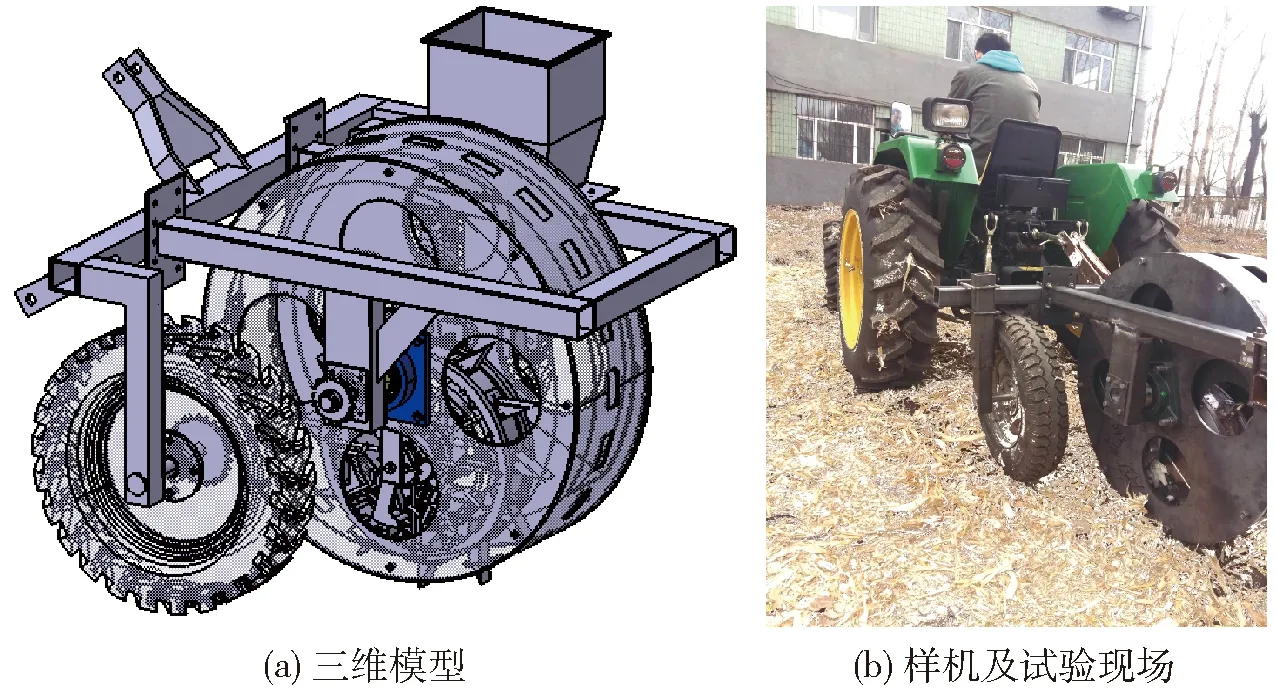
图14 三维模型及试验样机Fig.14 3D model and prototype
5.2 试验与结果分析
2016年5月在东北农业大学试验场地进行了被动滚筒式免耕播种成穴机构样机功能试验。试验地为玉米收获与秸秆粉碎覆盖联合作业后的茬地,秸秆覆盖量大于1.1 kg/m2,土质为松嫩平原黑土土质,土壤硬度为12.1 kg/cm2,土壤含水率为23.6%。拖拉机配套动力35 kW,如图14b所示。
测试速度在设计作业速度区间取平均值,分别为1、1.25、1.50 m/s。
试验参照GB/T 20865—2007《免耕施肥播种机》和GB/T 6973—2005《单粒(精密)播种机试验方法》进行,重点验证该种机构的可行性并观测试验装置的通过性与成穴效果,结果如图15所示。
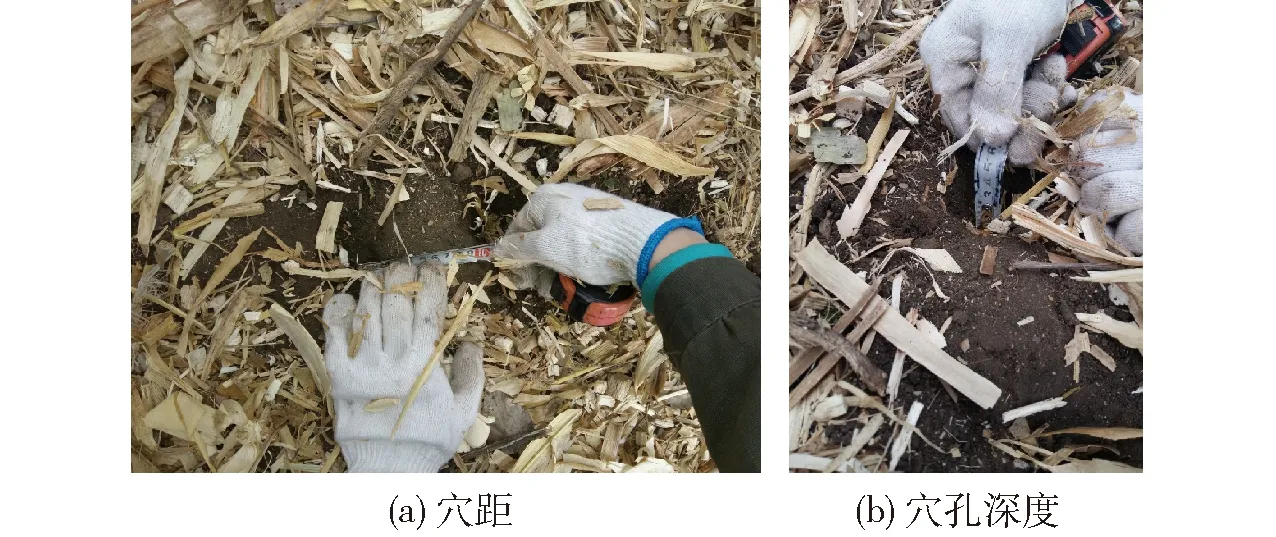
图15 成穴效果Fig.15 Cavitation effect
试验结果统计如表1所示。试验表明,该装置能够实现设计要求,滚筒可以对秸秆进行有效碾压,为鸭嘴顺利穿透秸秆层并成穴播种创造必要的条件。
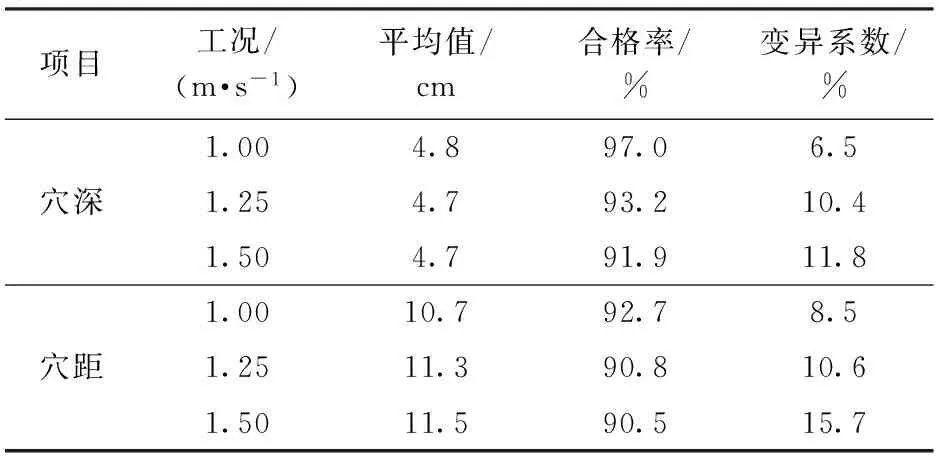
表1 试验结果统计Tab.1 Statistics of test result
6 结论
(1)具有一定直径的滚筒可有效碾压秸秆,并避免秸秆缠绕。滚筒能够创造穿透成穴部件的必要工作条件,避免了传统免耕播种对秸秆处理方式存在的问题与不足,是一种免耕播种的全新理念。
(2)对于株距为100 mm的整数倍,播深为50 mm的播种需求,基于几何及运动学分析确定鸭嘴滚轮排种装置半径200 mm,滚筒半径400 mm,鸭嘴最大截面尺寸45 mm×30 mm、高度90 mm、鸭嘴助力角α=23°,鸭嘴合理驱动区间为31°~1°,滚筒驱动孔个数为23个,驱动孔尺寸为84 mm×32 mm。
(3)在最高设计作业速度1.50 m/s工况下的试验结果为穴深合格率91.9%,穴距合格率90.5%,满足相关标准规定。试验表明研究成果能够证实注射式免耕播种思想的可行性,以及被动滚筒式免耕播种成穴关键技术向实际应用转化的可操作性。
1 孙伟.打穴式免耕播种机的研究[D].兰州:甘肃农业大学,2006. SUN Wei. Research of no-till hill-drop planter[D]. Lanzhou: Gansu Agricultural University, 2006. (in Chinese)
2 SULLIVAN D G, TRUMAN C C, SCHOMBERG H H, et al. Potential impact of conservation tillage on conserving water resources in Georgia[J]. Journal of Soil and Water Conservation, 2007, 62(3):145-152.
3 RALPH P. Analyzing future farming practices today[C]∥Proceedings of 2004 Western States Conservation Tillage Conference, 2004.
4 李洪文,陈君达,邓建.旱地玉米机械化保护性耕作技术及机具研究[J].中国农业大学学报,2000,5(4):68-72. LI Hongwen, CHEN Junda, DENG Jian. Study on technology and machines of mechanized conservation tillage for dryland maize[J].Journal of China Agricultural University, 2000, 5(4): 68-72. (in Chinese)
5 王宏立,张祖立,张伟,等.机械化保护性耕作免耕播种机的研究现状及发展趋势[J].农机化研究,2006,28(10):22-24. WANG Hongli, ZHANG Zuli, ZHANG Wei, et al. Research situation and development trend of no-till planter for mechanized conservation tillage[J].Journal of Agricultural Mechanization Research, 2006, 28(10): 22-24. (in Chinese)
6 SOZA E, BOTTA G, TOUM M, et al. Direct corn seeding. Effects of residue clearance on implant efficiency [J]. Spanish Journal of Agricultural Research, 2003, 1(3): 99-103.
7 陈海涛,查韶辉,顿国强,等. 2BMFJ系列免耕精量播种机清秸装置优化与试验[J/OL].农业机械学报,2016,47(7):96-102.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160714&flag=1.DOI:10.6041/j.issn.1000-1298.2016.07.014. CHEN Haitao, ZHA Shaohui, DUN Guoqiang, et al. Optimization and experiment of cleaning device of 2BMFJ type no-till precision planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 96-102. (in Chinese)
8 HE Jin, LI Hongwen, WANG Xiaoyan, et al. The adoption of annual subsoiling as conservation tillage in dryland maize and wheat cultivation in northern China[J]. Soil and Tillage Research,2007, 94(2): 493-502.
9 高焕文,李洪文,姚宗路.轻型高防堵性能免耕播种机研究[J].中国工程科学,2007,9(9):35-39. GAO Huanwen, LI Hongwen, YAO Zonglu. Study on the light no-till seeders with high anti-blockage performance[J]. Engineering Sciences, 2007, 9(9): 35-39. (in Chinese)
10 高焕文,李洪文,姚宗路.我国轻型免耕播种机研究[J].农业机械学报,2008,39(4):78-82. GAO Huanwen, LI Hongwen, YAO Zonglu. Study on the Chinese light no-till seeders[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(4): 78-82. (in Chinese)
11 高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4. GAO Huanwen, LI Wenying, LI Hongwen. Conservation tillage technology with Chinese characteristics[J]. Transactions of the CSAE, 2003, 19(3): 1-4. (in Chinese)
12 王汉羊,陈海涛,纪文义.2BMFJ-3型麦茬地免耕精播机防堵装置[J/OL].农业机械学报,2013,44(4):64-70.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130412&flag=1.DOI:10.6041/j.issn.1000-1298.2013.04.012. WANG Hanyang, CHEN Haitao, JI Wenyi. Anti-blocking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese)
13 王汉羊,陈海涛,纪文义.2BMFJ-3(B)型茬地大豆免耕覆秸精播机性能试验研究[J].大豆科技,2012(2):43-46. WANG Hanyang, CHEN Haitao, JI Wenyi. Performance test on 2BMFJ-3(B) no-tillage soybean precision seeder in stubble field[J]. Soybean Science and Technology, 2012(2): 43-46. (in Chinese)
14 张晋国,高焕文.免耕播种机新型防堵装置的研宄[J].农业机械学报,2000,31(4):33-35. ZHANG Jinguo, GAO Huanwen. Study on the strip chopping anti-blocking mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35. (in Chinese)
15 孙伟,吴建民.冲孔免耕穴播机入土成穴原理的研究[J].甘肃农业大学学报,2006,41(1):97-99. SUN Wei, WU Jianmin. Research on boring and caving principle of no-tillage punch hill-drop drill[J]. Journal of Gansu Agricultural University, 2006, 41(1): 97-99. (in Chinese)
16 马旭,马成林,张守勤.地膜覆盖播种机成穴器的研究[J].农业机械学报,1989,20(4):20-27. MA Xu, MA Chenglin, ZHANG Shouqin. The study on accumulative drop unit of film mulch planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 1989, 20(4): 20-27. (in Chinese)
17 辛力.快速变换株距式播种器:中国,201220675057.8[P].2012-12-10.
18 刁培松,杜瑞成.集成式舵轮槽轮穴播器的研制[J].农机化研究,2009,31(10):82-84,88. DIAO Peisong, DU Ruicheng. Development of the integrated dibbler with fluted seed roller and steering wheel[J]. Journal of Agricultural Mechanization Research, 2009, 31(10): 82-84, 88. (in Chinese)
19 刘宏新. 大豆密植平播机关键部件研究及整机设计[M].北京:中国农业出版社,2007.
20 张军昌,闫小丽,薛少平,等.秸秆粉碎覆盖玉米免耕施肥播种机设计[J/OL].农业机械学报,2012,43(12):51-55.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121210&flag=1.DOI:10.6041/j.issn.1000-1298.2012.12.010. ZHANG Junchang, YAN Xiaoli, XUE Shaoping, et al. Design of no-tillage maize planter with straw smashing and fertilizing[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(12): 51-55. (in Chinese)
21 孙伟,吴建民. 鸭嘴式成穴器的选型与研究[J].甘肃农业大学学报,2009,44(5):140-142. SUN Wei, WU Jianmin. Shape select and study on the duck-rostra type punching-opener[J]. Journal of Gansu Agricultural University, 2009, 44(5): 140-142. (in Chinese)
22 中国农业机械化科学研究院.农业机械设计手册(上册)[M].北京:中国农业科学技术出版社,2007:321.
DesignandExperimentonPassiveDrum-typeNo-tillPlanterCavitationMechanism
LIU Hongxin WEN Haonan GAI Guangwei TANG Shifa
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
For the traditional no-tillage planter, the straw and stubble could be cut or removed in the operation, so there was still high quality of performance requirements for cutting components, large power consumption, dust pollution and twining of straw and other issues. A kind of hill-mechanisms of no-tillage seeding was studied, which could penetrate the obstacles and then the hole was formed without any special treatment to the covering of surface. The key mechanism consisted of a duckbill type of roller seeding device and a passive roller driven by its own duckbill, both of which were in internal tangential relationship. The straw was rolled into a thin layer by the rotating drum, and then the duckbill reached and passed through the thin layer of straw to form a hole and accomplish seeding. Based on the kinematics analysis, the mathematical model among the drive angle (φ) of the duckbill, the power angle (α) of the duckbill, the angular velocity (ω0) of duckbill type of roller seeding device and the angular velocity (ω1) of the drum was established. According to the seeding condition that the spacing must be integral multiple of 100 mm, the Matlab (matrix laboratory) image processing module was used to analyze the equation of the models, and the structure and work requirements were chosen as the constraints, the speed fluctuation of rotating drum was selected as the main measure index and the compact condition of structure as the auxiliary measure index, thus optimized to obtain the optimal combination of the parameters: the radius of the duckbill wheel seeding device was 200 mm, the radius of the rotating roller was 400 mm, the power angle of the duckbill (α) was 23°, and the initial driving angle (φ) was 31°, then the number of driving holes of the rotating drum was calculated as 23, the size of which was 84 mm×32 mm by the method of further geometric analysis. Using CATIA to do digital prototype motion simulation, the practical situation and the change rule of angular velocity when the rotating drum under the action of the duckbill were analyzed, therefore the theoretical analysis was verified. The prototype test showed that the passive roller type of no-till planter hill-mechanism could meet the design requirements, it was simple and reliable in working process and it was also an effective technical choice for no-tillage seeding.
no-till planting; cavitation mechanism; passive roller; kinematics analysis; simulation
S223.2+3
A
1000-1298(2017)09-0053-09
10.6041/j.issn.1000-1298.2017.09.007
2016-12-12
2017-01-20
黑龙江省博士后科研启动基金项目(LBH-Q14024)
刘宏新(1971—),男,教授,博士生导师,主要从事农业机械化技术与装备等研究,E-mail: Lcc98@neau.edu.cn
猜你喜欢
Asian Herpetological Research(2023年4期)2024-01-02 06:49:24
中国野生植物资源(2023年9期)2023-10-20 09:11:32
河北农机(2021年11期)2021-11-29 13:16:20
孩子·小学版(2019年11期)2019-09-10 09:33:39
冰雪运动(2019年2期)2019-09-02 01:41:22
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
阅读(中年级)(2016年11期)2017-01-23 12:12:29
火控雷达技术(2016年1期)2016-02-06 02:18:01
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
中国铁道科学(2015年4期)2015-06-21 06:46:06