
基于四杆机构的扑翼驱动机构设计和运动仿真
2017-10-10 00:49朱伟平
重庆科技学院学报(自然科学版) 2017年5期
徐 兵 朱伟平
(巢湖学院, 安徽 巢湖 238000)
基于四杆机构的扑翼驱动机构设计和运动仿真
徐 兵 朱伟平
(巢湖学院, 安徽 巢湖 238000)
设计了一种基于四杆机构的新型扑翼驱动机构,实现仿生扑翼飞行运动。为了获得最佳的传动性能,通过数值分析计算得到最小传动角,并得到扑动过程的最大上扑角和下扑角。运用参数化建模的方式得到扑翼机构的模型,在ADAMS中进行运动学仿真分析。仿真结果表明:机翼在扑动过程中的扑动角度、角速度和角加速度与时间成正弦规律变化,最大上扑角和下扑角与理论计算值基本一致,为扑翼驱动机构的设计制造提供依据。
扑翼驱动机构; 最小传动角; 运动学仿真
扑翼飞行器是指像鸟或者昆虫通过机翼主动运动产生升力和前行力的飞行器,可在飞行过程中完成多种形式的运动。扑翼飞行与固定翼和旋翼飞行相比,具有如原地或小场地起飞,良好的飞行机动性和一定的空中悬停性能,长距离飞行能耗较少等特点。在民用和军事领域都具有极大的应用前景,也是当前国内外机器人领域研究的热点之一[1-4]。西北工业大学是国内最早研究扑翼飞行器的,主要驱动机构为曲柄滑块摇杆机构和双曲柄双摇杆机构[5]。东南大学研究提出用柔性翅代替刚性翅,指出柔性翅更适合仿生扑翼飞行,柔性能可显著增加扑翼飞行的升力、增强飞行的稳定性[6]。南京航天航空学院主要研究了扑翼飞行器的气动特性[7-8]。国外学者通过一些智能材料驱动翅膀实现扑翼运动,如加州伯克利大学研制的MFI[9]是运用压电石英作为驱动材料。美国佐治亚理工大学研制的Entomopters[10]采用的是往复式化学肌肉(RCM,Reciprocating Chemical Muscle)。在前人研究的基础上,根据鸟类飞行特点设计出了一种曲柄-滑块-连杆组成的微型扑翼驱动机构。为了得到最大的最小传动角以提高传动性能,对驱动机构进行设计计算,在三维软件Soliwork中进行参数化建模,并基于ADAMS进行仿真分析。
1 基于四杆机构对扑翼飞行器的动力设计
动物的飞行主要是靠其翅膀的多样性和复杂的运动模式来实现的。扑翼飞行器是根据鸟类飞行原理,用机构组合来实现机翼的上下扑动产生升力和推力,从而实现扑翼飞行器的各种运动。研究设计了曲柄-滑块-连杆组合式的机构来实现机翼的上下往复运动。扑翼飞行器的飞行性能受表面积、总质量和体积的影响,而动力装置所占的体积和质量将直接影响飞行器的各种性能,此次研究主要从驱动装置展开。
1.1四杆机构的设计及数学建模
图1为传动机构简图,固定铰链点O为坐标原点(0,0),曲柄L1围绕O点转动。固定铰链C的坐标为(X,Y),θ1为曲柄转过的瞬时角度,θ3为右侧摇杆的瞬时扑动角度。
在连杆机构中,常用传动角的大小及变化情况来衡量机构传动性能的好坏,而扑翼飞行器飞行时翅膀上下扑动的频率较高,在设计时要使最小传动角最大,最小传动角与四杆机构的其他性能参数有关。为了获得较好的传动性能,从最小传动角的角度出发进行设计,而根据四杆机构的角度关系、杆长关系可以得到最小传动角的数学公式。

图1 传动机构简图
图2为角位移矢量分析图。

图2 角位移矢量分析图
由图2可得:
l1eiθ1+l2eiθ2=X+iY+l3eiθ3
(1)
角位移位移矢量在实轴与虚轴上分解可得:
l1cosθ1+l2cosθ2=X+l3cosθ3
l1sinθ1+l2sinθ2=Y+l3sinθ3
(2)
消去θ2后可得:
Ecosθ3+Fsinθ3+G=0
其中:E=X-l1cosθ1
(3)
F=Y-l1sinθ1

(4)
根据三角函数变换公式:

(5)
将式(5)代入式(3)得:
(6)
将式(6)带入式(3)可求出:

(7)
右侧摇杆l3的瞬时扑动角度:
(8)
最大扑动幅度角示意图见图3、图4。

图3 上扑角示意图
上扑角φ上:

(9)

图4 下扑角示意图
下扑角φ下:

(10)
由上式可得最大扑动角

(11)
最小传动角ρmin示意图见图5、图6。
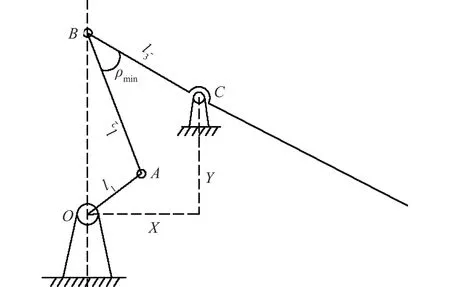
图5 最小传动角第一种位置
图5中l2与l3夹角为锐角,此时:

(12)

图6 最小传动角第二种位置
图6中l2与l3夹角为钝角,此时:

(13)
选扑翼机参数:l1=10 mm,l2=46 mm,l3=28 mm,X=25 mm,Y=20 mm,齿轮模数m=2 mm。可得:

2 扑翼机结构动力学仿真的实现
2.1扑翼机结构动力学仿真模型的建立
三维几何模型在SOLIDWOKS环境下建立零部件并且装配完成,将SOLIDWOKS模型以parasolid格式导出,并导入ADAMS中,进行保存。这样就借助SOLIDWOKS实体建模软件完成了船用起重机结构在ADAMS中虚拟样机的建立。然后根据所需要的运动规则,在相应的部件添加适合的约束,在y方向上加上重力完成扑翼机动力学仿真模型,如图7所示。

图7 扑翼机结构动力学仿真模型
2.2.1 扑翼机扑动时翅膀的扑动行程分析
扑翼机扑动时翅膀的行程曲线见图8。由图8可看出翅膀下扑位移接近上扑位移的1.5倍,这与自然界中鸟类飞行时翅膀的扑动位移一致,因此,该扑翼机的结构能够较好地模拟鸟类扑动时的状态,得到较准确的数据仿真结果。

图8 扑翼机扑动时翅膀的行程曲线
2.2.2 扑翼机扑动速度分析
扑翼机扑动速度曲线如图9所示。扑翼机翅膀扑动速度近似于正弦曲线,因此,能够保持机构较平稳的扑动。曲线中尖角处产生的原因主要是由于滑块带动翅膀支杆到达最高位置时,扑动方向发生突变而速度没有改变造成的。

图9 扑翼机扑动速度曲线
2.2.3 扑翼机扑动角度分析
扑翼机扑动角度曲线如图10所示。扑动角度与时间成正弦规律变化,扑翼机的上下扑动角度为80°左右,上扑角度为25°左右,下扑角度为55°左右,这与上述理论计算数值相符合。表明扑翼机的扑动系统能够较好地模拟鸟类翅膀扑动的姿态。

图10 扑翼机扑动角度曲线
2.2.4 扑翼机扑动角速度分析
扑翼机角速度曲线如图11所示。扑翼机扑动角速度按正弦规律变化,角速度为零时图形曲线出现尖角,原因是滑块推动翅膀支杆到达最高位置翅膀下扑到最大位置时,刚刚开始向上扑时角速度方向发生突变所造成的。

图11 扑翼机角速度曲线
3 结 语
通过模拟自然界中鸟类扑动的规律,获得原始的数据参数,运用Soliworks进行三维建模并导入ADAMS仿真软件中,进行动力学仿真分析。通过仿真结果分析可知,微型扑翼机的各项参数均满足当初的设计要求,因此,该结果可为后期扑翼机的优化设计提供理论支持。
[1] 陈文元,张卫平.微型扑翼式仿生飞行器[M].上海:上海交通大学出版社,2010:5-6.
[2] MCMICHAEL J M, FRANCIS C M S. Micro Air Vehicles-Toward a New Dimension in Flight[R]. US DARPATTO Report, 1997.
[3] 肖永利,张琛.微型飞行器的研究现状与关键技术[J].宇航学报,2001,22(5):26-32.
[4] 肖天航.低雷诺数非定常流场的数值方法及其在微型飞行器上的应用[D].南京:南京航空航天大学航空宇航学院,2009:12-13.
[5] 杨淑利,宋文萍,宋笔锋,等.微型扑翼飞行器机翼气动特性研究[J].西北工业大学学报,2006,24(6):768-773.
[6] 于冰.微型仿生扑翼飞行机器人飞行机理和控制方案研究[D].南京:东南大学,2006:17-19.
[7] 段文博,昂海松,肖天航.主动变形扑翼飞行器的设计和风洞测力试验研究[J].航空学报,2013,34(3):474-486.
[8] 朱保利.多自由度扑翼微型飞行器设计研究[D].南京:南京航空航天大学,2008:19-21.
[9] FEAR R S, CHIANG K H, DICKINSON M H, et al. Wing Transmission for a Micromechanical Flying Insect[C]. IEEE International Conference on Robotics and Automation, ICRA 2000, April 24-28, 2000, San Francisco, Ca, Usa. DBLP, 2000:1509-1516.
[10] MICHELSON R C, REECE S. Update on Flapping Wing Micro Air Vehicle Research Ongoing Work to Develop a Flapping Wing, Crawling “Entomopter”[C]. In:13th Bristol International RPV Conference. Bristol, England, 1998:3.
Abstract:A new flapping-wing mechanism based on four-bar mechanism was designed to realize the flying motion of bionic flapping wing. In order to get the best transmission performance, the minimum transmission angle was calculated by numerical analysis, and the maximum flapping angles in the flutter process of up an down were obtained. The model of flapping wing mechanism was obtained by parametric modeling, and kinematics simulation was carried out in ADAMS. The simulation results showed that the flapping angles, angular velocity and angular acceleration of the wing changed like a sine curve, and the maximum flapping angles were basically the same as the theoretical calculation value, which would provide reference for the design and manufacture of flapping wing drive mechanism.
Keywords:flapping-wing actuator; minimum transmission angle; kinematics simulation
DesignandMotionSimulationofFlappingWingDrivingMechanismBasedonFour-BarMechanism
XU Bing ZHU Weiping
(Chaohu University, Chaohu Anhui 238000, China)
V211
A
1673-1980(2017)05-0063-04
2017-04-23
安徽省高等学校自然科学研究项目“基于离子聚合物金属复合物的多自由度仿生扑翼运动的驱动技术研究”(KJ2015A281);安徽省巢湖学院校级科学研究项目“仿生扑翼机器人的研究”(XLZ-201506)
徐兵(1990 — ),男,巢湖学院助教,研究方向为驱动器、扑翼机器人。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
凤凰动漫(军事大王)(2022年1期)2022-04-19
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
电子制作(2018年2期)2018-04-18
中学生数理化·高一版(2017年3期)2017-07-08
制造技术与机床(2017年3期)2017-06-23
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
小朋友·快乐手工(2015年5期)2015-06-06
