雷达昆虫学研究进展及应用前景
2017-10-09 00:52张云慧姜玉英张鹿平程登发
植物保护 2017年5期
张 智, 张云慧, 姜玉英, 张鹿平, 程登发
(1. 中国农业科学院植物保护研究所植物病虫害生物学国家重点实验室, 北京 100193; 2. 北京市植物保护站, 北京 100029; 3. 全国农业技术推广服务中心, 北京 100025; 4. 无锡立洋电子科技有限公司, 无锡 214028)
雷达昆虫学研究进展及应用前景
张 智1,2, 张云慧1*, 姜玉英3, 张鹿平4, 程登发1
(1. 中国农业科学院植物保护研究所植物病虫害生物学国家重点实验室, 北京 100193; 2. 北京市植物保护站, 北京 100029; 3. 全国农业技术推广服务中心, 北京 100025; 4. 无锡立洋电子科技有限公司, 无锡 214028)
雷达昆虫学经过近50年的发展,取得一系列的重要成果。本文系统介绍了各类昆虫雷达的体制和功能,总结了相似体制天气雷达与昆虫雷达的主要区别,回顾了各相关国家雷达昆虫学的实践情况,归纳了昆虫雷达建制技术取得的进步,并展望了雷达应用的前景及其今后昆虫雷达建制技术的发展方向,以期促进我国昆虫雷达事业的发展。
昆虫雷达; 扫描昆虫雷达; 垂直监测昆虫雷达; 昆虫谐波雷达; 激光雷达; 害虫监测; 建制技术
雷达是英文radar的音译,源自radio detection and ranging,意为“无线电探测和测距”即指利用电磁波对空中目标进行位置探测的一套系统。雷达系统复杂多样,但一般包括发射、接收和信号处理三部分。理论上,能够反射电磁波的物体都能被雷达探测到,如金属物品、雨滴、雪花、鸟类和昆虫等都能产生雷达回波[1-4]。昆虫雷达就是以观测昆虫为目标,经过特殊设计的雷达系统,因此,昆虫雷达既具有常规雷达系统的基本特点,又在距离分辨率等方面独具特色。
雷达观测昆虫的历史可以追溯至20世纪40年代,当时,天气雷达在晴空天气条件下探测到一些神秘回波,由于不确定回波目标的种类,学者浪漫地称之为“天使(angel)”。1949年,Crawford利用探照灯对昆虫数量进行统计,同时利用雷达观测“天使”回波,最终首次证实大部分“天使”回波的目标是由昆虫引发,并首次提出雷达监测昆虫飞行的可行性[5]。1954年,Rainey通过与气象部门合作,利用天气雷达对沙漠蝗Schistocercagregaria的蝗群进行了观测,昆虫学家进一步意识到雷达在害虫监测中的潜力[6]。1968年,世界上第一台昆虫雷达诞生,此后被安放在非洲撒哈拉对蝗虫进行了观测[7]。昆虫雷达的诞生及快速发展为昆虫迁飞监测与研究工作提供了一种卓越的、无可替代且强有力的工具[1,8]。昆虫雷达能远距离大范围且对目标没有干扰的情况下,对空中目标种群进行快速观测,获得回波数量、迁移方向、迁移高度、迁移速度等重要参数,此外,昆虫雷达还可以揭示空中迁飞昆虫的起飞、成层、定向等行为特征及其与大气结构之间的关系[1]。经过几十年的发展,雷达科学与昆虫科学不断交叉,理论基础不断丰富,建制技术取得长足进步,雷达功能不断拓展完善。在昆虫迁飞和行为研究中开启了许多新篇章,逐步形成了一门新的分支学科——雷达昆虫学(radar entomology)[1-4,8]。
尽管跟踪动物行为的方法有很多,但由于昆虫个体小,不能携带用于跟踪鸟类等其他大型目标的GPS项圈,因此,昆虫雷达仍然是研究昆虫行为的重要有效工具之一[9]。为了系统回顾昆虫雷达取得的成就,更好地促进中国昆虫雷达事业的发展,本文对昆虫雷达进行了全面总结,以期为今后中国昆虫雷达建制提供必要的参考。
1 昆虫雷达的类型及特点
经过几十年的发展,世界各国建制了形式多样的昆虫雷达。根据工作方式,昆虫雷达可分为扫描昆虫雷达、垂直监测昆虫雷达、昆虫谐波雷达等;按照波长可分为毫米波昆虫雷达和厘米波昆虫雷达;根据调制方式可以分为脉冲昆虫雷达、调频连续波昆虫雷达和激光昆虫雷达等;此外,电磁波极化方式也可以分为水平极化、垂直极化、双极化和旋转极化等[2]。在实际建制过程中,某一类昆虫雷达会涉及多个分类特征,从而获得更为准确的属性。在建制目的方面,扫描昆虫雷达和垂直监测昆虫雷达主要用于监测迁飞性昆虫,谐波雷达主要用于开展昆虫行为研究,激光雷达主要用于开展空中目标的识别[10-13]。
1.1 扫描昆虫雷达
扫描昆虫雷达是一种常见的雷达系统,世界上第一台昆虫雷达就属于扫描昆虫雷达。扫描昆虫雷达运转时,抛物面型天线能以不同仰角做水平扫描,也可在固定方位做俯仰扫描。水平扫描时,图像显示方式为平面位置显示(plan position indicator,PPI)。俯仰扫描时,图像显示方式为距离—高度显示(range height indicator, RHI)[1-2]。PPI图像可以快速获取目标数量、高度、方位等信息,利用“RGB三色图”将PPI图像叠加后,还可以计算出目标的飞行方向和飞行速度[2,14]。RHI扫描属于另外一种探测模式,可以便捷地显示某一方位角回波数量随高度的变化。根据波长,扫描昆虫雷达又可分为厘米波扫描昆虫雷达(3.2 cm)和毫米波扫描昆虫雷达(8.8 mm)。早期扫描昆虫雷达都是由海事雷达改装的,频率为X波段,波长多为3.2 cm或3.0 cm,主要用于观测蝗虫、草地螟Loxostegesticticalis、黏虫Mythimnaseparata、棉铃虫Helicoverpaarmigera等较大体型害虫。后期为了观测小型昆虫如稻飞虱和蚜虫等,雷达昆虫学家又设计出波长为8.8 mm的毫米波扫描昆虫雷达[15-16]。扫描昆虫雷达具有扫描范围大、取样速度快、数据显示直观等特点,尤其在观测迁飞昆虫的成层和定向行为方面具有非常明显的优势。为了拓展新的功能,扫描雷达在引入多普勒效应以后,衍生出多普勒扫描雷达,它可以很便捷地测定空中目标的速度场和速度谱,如果能够应用于迁飞昆虫监测,将大幅度提升迁飞昆虫飞行行为的研究水平。
1.2 垂直监测昆虫雷达
垂直监测昆虫雷达是20世纪70年代率先从英国发展起来的一种独特的昆虫雷达系统。垂直监测昆虫雷达的出现,是雷达昆虫学发展史上的一个里程碑,它推动了昆虫雷达由研究型向实用型转变[10,17]。与扫描昆虫雷达相比,垂直监测昆虫雷达的抛物面型天线竖直向上,馈源中心轴与抛物面天线对称轴偏离0.2°,且馈源可围绕垂直轴作机械转动产生旋转极化波束并形成锥扫[10,12,18-21]。垂直监测昆虫雷达具有参数解算丰富、目标识别能力强、自动化程度高等优势。目前,英国和澳大利亚的垂直监测昆虫雷达,获取的数据是按距离门(range gate)进行取样。英国垂直监测昆虫雷达的盲区是150 m,150~1 140 m之间的探测空间共分为15个距离门,每个距离门的取样范围45 m,间隔26 m的非取样区[22]。澳大利亚垂直监测昆虫雷达的取样起始高度为200 m,共分8个距离门,每个距离门的取样高度为50 m,非取样区间隔为150 m[23]。通过解算,垂直监测昆虫雷达可以获得位移速度、位移方向、定向角度、振翅频率和3个与体型大小有关的RCS(雷达反射截面)参数α0、α2和α4,通过对α0、α2和α4的运算,可以大致获得目标的体型和重量[17-19]。为了提高振翅频率解算能力,澳大利亚的Drake博士又引入了静止波束模式(stationary beam mode)[23]。与扫描昆虫雷达相比,垂直监测昆虫雷达操作更为简单,在目标识别能力方面有了很大提高,但是目前垂直监测昆虫雷达都属于厘米波段,对类似蚜虫大小的昆虫还无法识别[24],毫米波垂直监测昆虫雷达的设计与制造仍然存在许多需要探索的问题[25]。
1.3 昆虫谐波雷达
昆虫谐波雷达(insect harmonic radar)是监测低空飞行昆虫的一种重要手段[11]。根据谐波雷达原理,谐波昆虫雷达需在被观察目标的身体上固定有一个很小的电子标签(变频二极管),该装置收到谐波雷达天线发出的电磁波后,会发射2倍或多倍于原频率的谐波信号。谐波雷达接收系统自动屏蔽地物返回的杂波,针对性地接收调制回波,通过比较相位,获得目标的方位信息[26]。与上述两种雷达相比,谐波昆虫雷达具有监测速度快,抗干扰能力强等优点,更为重要的是谐波昆虫雷达可以在扫描昆虫雷达和垂直监测昆虫雷达的盲区内有效开展工作。世界上第一台真正意义上的便携式昆虫谐波雷达诞生于1986年,Mascanzoni和Wallin的研究小组利用这台谐波雷达,成功跟踪了土壤洞穴中的昆虫活动行为[27]。目前,已有的昆虫谐波雷达分便携式和基站式2种类型,主要对隶属于鞘翅目、鳞翅目、双翅目、膜翅目和直翅目等类群的几十种昆虫的行为开展定量观察[11,28]。利用谐波昆虫雷达对昆虫行为开展研究,可更好地理解其行为机制,不仅能为授粉昆虫的应用提供数据支持,也可以为害虫防治提供新的理论基础和防治策略[11]。在实际监测工作中,为避免电子标签影响昆虫的正常行为,标签重量不能超过目标自重的10%[26,29]。目前,最轻的电子标签为0.3 mg[30],因此,还很难应用谐波昆虫雷达开展小型昆虫的行为研究。昆虫谐波雷达产品每次只能发射一个频率的电磁波,理论上只能跟踪1 个昆虫目标,但便携式昆虫谐波雷达通过标记昆虫、转换跟踪角度和设置时间差异,可以同时跟踪超过30个目标[11]。今后随着新材料和芯片技术的进步,电子标签的制作技术会不断提高,谐波雷达技术在昆虫行为研究中的应用前景值得期待。
1.4 激光雷达
激光雷达(light detection and ranging,lidar),是激光探测和测距系统的简称,由激光发射机、光学接收机、转台和信息处理系统等部分组成,工作波段位于红外和可见光波段,主要应用于探测、测距和地理信息测绘等工作。2009年,Applied Optics杂志首次报道了瑞典隆德大学(Lund University)利用激光雷达对Calopteryxsplendens和Calopteryxvirgo两种豆娘标本进行识别的研究结果,发现在距离60 m时,可以利用激光雷达区分C.splendens的雌雄[13]。浙江大学和瑞典隆德大学合作利用瑞典的雷达系统对褐飞虱Nilaparvatalugens、白背飞虱Sogatellafurcifera、灰飞虱Laodelphaxstriatellus、棉铃虫、斜纹夜蛾Spodopteralitura、甜菜夜蛾Spodopteraexigua和二化螟Chilosuppressalis的标本进行了探测,结果发现距离为50 m时,可以检测到飞虱,可以将2头斜纹夜蛾标本,识别成独立目标,不同大小昆虫的荧光强度有明显分离。研究表明,激光雷达系统在昆虫迁飞研究中也具有可行性,而且不受白天和夜晚的限制[31]。
2 相似模式昆虫雷达和天气雷达的区别
利用雷达探测昆虫迁飞起源于天气雷达,世界上第一台昆虫雷达就是在天气雷达的基础上经过特殊改进而来。如果同为扫描体制,天气雷达特别是测雨、测云雷达与昆虫雷达在结构、原理等方面基本一致。在雷达昆虫学实践中,经常会面临这样的疑问,既然天气雷达能探测昆虫目标,为什么还要专门建立昆虫雷达呢?尽管天气雷达很早就被证实可以发现昆虫目标,但昆虫雷达与之相比,还是具有其特殊之处。天气雷达观测目标是大范围的云雨,在雷达波束照射范围内,云雨目标是由许多微小的粒子构成,观测时需要进行多次采样平均后才能比较真实地反映目标信息[32]。由于云雨目标一般非常弱小,为了增加天气预报的时效性,气象部门要求探测到较远距离上的云雨目标,因此,天气雷达的发射功率一般都很大,接收机的灵敏度也很高,天线口径在发射频率降低时也相应增加,否则很难满足探测需求。根据昆虫体内含有水分的特性,昆虫也能被天气雷达探测,但在通常情况下,天气雷达观测不到单个昆虫[33]。如果探测不到单个昆虫个体,就很难估算空间昆虫密度,也很难对其行为进行细致刻画。昆虫雷达是以探测单个个体为首要目标而经过专门设计的一种特有雷达系统,它与天气雷达之间存在多方面的差异。首先是波长,天气雷达波段主要有S(10 cm)波段和C(3.8~7.5 cm)波段,而昆虫雷达多为X(2.4~3.8 cm)和Ka(0.8~1.1 cm)波段,在实际生产中,厘米波昆虫扫描雷达波长为3.2 cm,毫米波扫描昆虫雷达为8.8 mm。第二是脉冲宽度和脉冲功率,这两个参数属于发射系统指标,与雷达距离分辨率和探测范围密切相关。天气雷达的脉冲宽度为0.5/1 μs,距离分辨率为75/150 m,当脉冲功率达到75 kW,按目前接收机的水平,对于中等强度的降水(4 mm/h)其最大探测距离可达300 km。当脉冲宽度降低时,虽然可以提高距离分辨率,但会影响探测距离。昆虫雷达设计时,脉冲宽度一般小于0.1 μs,距离分辨率在15 m左右,但是脉冲宽度为0.1 μs的发射机功率一般只有几个kW,因此昆虫雷达的最大探测距离(对单体昆虫)往往只有几公里。此外,当脉冲功率增大时,由于天线副瓣的影响,也会对近距离目标的探测产生不利的影响,因此,昆虫雷达的发生系统指标是需要综合考虑的。第三,昆虫雷达的信号处理和终端分析、显示软件与天气雷达不同。天气雷达和昆虫雷达都需要探测目标的空间分布,除此之外,昆虫雷达需要统计昆虫的数量、密度、高度,测量昆虫个体的飞行速度和方向等信息。另外,雷达的噪声和杂波对昆虫雷达影响很大,相对而言,气象雷达就很容易区分真实的目标与噪声以及杂波。
表1X波段天气雷达与昆虫雷达重要参数对照表1)
Table1ComparisonofkeyparametersbetweentheX-bandweatherradarandtheX-bandentomologicalradar
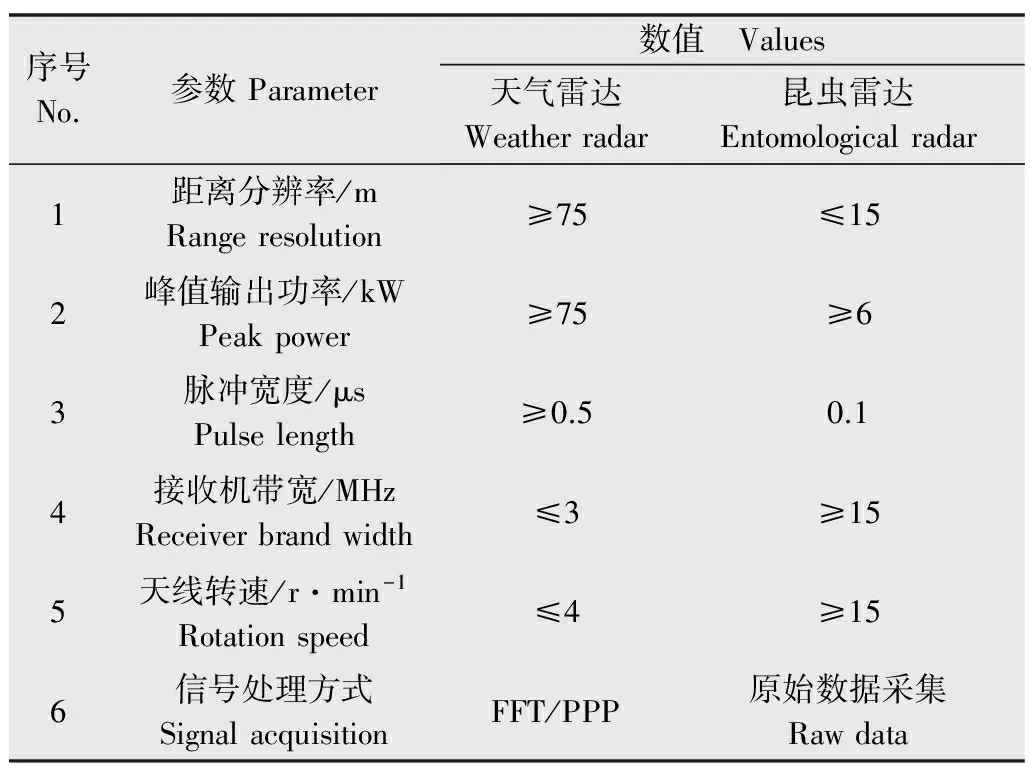
序号No.参数Parameter数值 Values天气雷达Weatherradar昆虫雷达Entomologicalradar1距离分辨率/mRangeresolution≥75≤152峰值输出功率/kWPeakpower≥75≥63脉冲宽度/μsPulselength≥0.50.14接收机带宽/MHzReceiverbrandwidth≤3≥155天线转速/r·min-1Rotationspeed≤4≥156信号处理方式SignalacquisitionFFT/PPP原始数据采集Rawdata
1) FFT/PPP:傅里叶变换或双脉冲处理。 FFT/PPP: Fast Fourier transformer / Pulse pair processing.
3 国内外雷达昆虫学实践情况
世界上从事雷达昆虫学实践的国家有英国、澳大利亚、美国、加拿大、中国等,各国的侧重点并不相同,经过近几十年的发展,各国都为推动昆虫雷达技术的发展做出了重要贡献(http://radarentomology.com.au)。
3.1 英国
英国是世界上最早开展雷达昆虫学实践的国家,在昆虫雷达研制和应用方面具有领导地位,雷达昆虫学研究团队主要有英国自然资源研究所(Britain’s Natural Resources Institute, NRI)(前身为英国治蝗中心和海外有害生物研究中心)和洛桑试验站,专家有Schaefer G W、Riley J R、Reynolds、Smith A D、Chapman J W等[2]。1950年,Rainey博士提出了用雷达观测蝗虫的设想,并与英国皇家海军展开合作,于1954年用舰载雷达在波斯湾首次监测到蝗群[6]。1968年,在Rainey博士的邀请下,鸟类学家Schaefer博士建成世界上第一部专用的昆虫雷达,在尼日尔观测,获得了许多沙漠蝗夜间迁飞的新图景[1,7]。1970年,英国自然资源研究所的昆虫雷达研究室Riley博士受垂直气象雷达观测结果的启发,开始设计垂直监测昆虫雷达。1975年,第一台第一代垂直监测昆虫雷达研制成功,在非洲马里监测了蝗虫的迁飞[18,34]。由于一代垂直监测昆虫雷达,没有采用章动技术,只引入了旋转极化,因此,只能获得回波数量、高度和定向角度等参数。在自然资源研究所研制垂直监测昆虫雷达时,洛桑试验站也开启了垂直监测昆虫雷达的研制工作。1985年,英国洛桑试验站Bent G A博士成功引入章动技术,研制出了第二代垂直监测昆虫雷达样机,并在印度和澳大利亚进行了测试[22]。直到今天,二代垂直监测雷达技术仍是最成功的应用型雷达系统。1995年起,洛桑试验站与自然资源研究所就雷达研究展开紧密合作,但在2001年,英国自然资源研究所资助停止,2002年,该所雷达昆虫学实验室解散,人员与设备转入洛桑试验站。从2002年起,经过Riley、Smith、Chapman等人努力,洛桑试验站的雷达昆虫学研究取得一系列成果,先后利用垂直监测昆虫雷达观测了小菜蛾Plutellaxylostella、丫纹夜蛾Autographagamma、七星瓢虫Coccinellaseptempunctata和异色瓢虫Harmoniaaxyridis等昆虫的迁飞行为[35-37]。但是近几年,随着老一辈科学家的退休和Chapman转入Exeter大学,洛桑试验站的昆虫雷达研究队伍出现了较大变化。目前,该试验站加紧了垂直监测昆虫雷达技术的推广,在有关项目的支持下,英国的垂直监测昆虫雷达数量已经增加至3台,另外,还在美国和中国各安置1台。
英国除了开展上述雷达昆虫学方面的实践以外,在毫米波扫描昆虫雷达和昆虫谐波雷达方面也做出了突出贡献。20世纪80年代,英国自然昆虫研究所首次将毫米波昆虫雷达应用于昆虫迁飞研究,先后到菲律宾、中国等多个国家对稻飞虱等小型害虫进行观测[10]。在昆虫谐波雷达方面,1994年,Riley团队研制出一部基站式昆虫谐波雷达,该雷达系统在X频带扫描雷达的天线上方,增加了一个接收谐波信号的天线,两个天线同时以20 r/min的转速旋转,该雷达系统检测高度可达700 m,水平可检测距离最远约900 m,在当年的首次野外观测试验中,成功地跟踪了蜜蜂在蜂巢与蜜源之间的飞行[11,30]。在昆虫谐波雷达建制方面,英国还给德国等国家的研究机构提供了技术支持。
3.2 澳大利亚
澳大利亚的雷达昆虫学实践始于20世纪70年代。1971年,英国的Schaefer博士与澳大利亚联邦科学和工业研究组织(CSIRO)合作在澳大利亚开展雷达昆虫学实践。1978年,Drake被任命负责澳大利亚的昆虫雷达组,从此澳大利亚的雷达昆虫学有了长足进展,陆续发表一系列重要成果。Drake 博士在关于雷达观测和结果分析方面提出许多经典理论和方法,关于大气结构和运动尤其是中小尺度环流对昆虫迁飞行为的影响方面取得突出成就[1,38-39]。1991年,CSIRO解散,Drake博士转移到新南威尔士大学物理学院,与澳大利亚治蝗专业委员会等部门合作继续开展昆虫雷达监测。2000年前后,在英国研制出第二代垂直监测昆虫雷达以后,Drake博士也引入第二代垂直监测昆虫雷达设计理念,建立了2台垂直监测昆虫雷达。他在原来锥扫模式的基础上,又引入了静止波束模式,除了获得上述全部参数以外,还提取到昆虫的振翅频率[23]。此外,它们还尝试将两台垂直监测昆虫雷达组成一个小型雷达监测网络,通过电话线和互联网实现数据的传输[21]。
3.3 美国
美国是世界上最早利用雷达观测昆虫的国家之一,农业部农业研究局也曾经是世界上拥有昆虫雷达最多的实验室。美国曾经在雷达昆虫研究方面取得过骄人成就,但近年来,对雷达建制技术推动和学科发展的影响力略逊于其他国家。1949—1965年,美国气象学者Crawford等先后多次证实晴空天气条件下获得的雷达回波目标是昆虫[5],但之后开展观测活动并不多。1978年,Wolf被任命负责雷达昆虫学项目组工作,并在亚利桑那州开展首次观测,研究了棉田和相邻沙漠上空的昆虫[1-2]。1982年,该项目组在墨西哥湾利用船载昆虫雷达观测了蛾类的跨海迁飞。1987年, Wolf 与英国Cranfield大学的Hobb合作建成一部机载昆虫雷达,取得了雷达昆虫学研究中唯一一次对一个蛾群全夜迁飞过程的连续跟踪[1]。1985年,美国又成立了由Beerwinkle领衔的第二支雷达昆虫学研究队伍,随后,Beerwinkle建造了一部只保留旋转极化完全电脑控制的垂直监测昆虫雷达,创造了在1990—1991年连续两年自动观测的记录,获得了大量珍贵资料[40-41]。1991年,美国的两支雷达队伍合并成为害虫区域治理研究组,又建造了1部跟踪雷达,并于1994年投入使用。1996年Wolf退休后,Beerwinkle率领该团队继续开展工作。2000年以后,美国的昆虫雷达研究工作锐减,发表文章数量也大不如从前。
3.4 加拿大
加拿大的雷达昆虫学实践最早始于1973年,当时在英国昆虫雷达专家的帮助下,利用机载雷达观测了云杉色卷蛾Choristoneurafumiferana的迁飞[1]。后期,加拿大主要专注于便携式昆虫谐波雷达的研究,主要团队有纽布斯威克大学电子计算机系与加拿大农业部,相关专家有Bruce Colpitts和Gilles Boiteau。他们利用便携式谐波雷达先后追踪了马铃薯甲虫Leptinotarsadecemlineata、锚斑长足瓢虫Hippodamiaconvergens、异色瓢虫等昆虫的行为[26,42]。
3.5 中国
中国的雷达昆虫学研究起步较晚,1984年,吉林省农业科学院植物保护研究所的陈瑞鹿先生在澳大利亚Drake博士的帮助下,与无锡海星雷达厂合作,组建了中国第一台车载式厘米波扫描昆虫雷达,并于1984年5月至6月在山西应县观测了草地螟迁飞,从此揭开了中国雷达昆虫学研究的序幕[43-44]。1998年,中国农业科学院植物保护研究所与无锡海星雷达厂合作,组建了中国第二部厘米波扫描昆虫雷达,该雷达先后被安放在河北廊坊、山东长岛等地,对北方重大迁飞性害虫如草地螟、棉铃虫、甜菜夜蛾、绿盲蝽Apolyguslucorum等进行了监测[45-47]。2001年,面对扫描昆虫雷达数据处理技术方面存在的难题,中国农业科学院植物保护研究所的程登发研究员创新提出“RGB三色图”计算监测目标飞行方向和速度的方法,并开发了数据采集与分析软件,实现了扫描昆虫雷达的数据采集与分析自动化,极大地推动了扫描昆虫雷达技术的发展,为该类型雷达的推广应用提供了强有力的技术支撑[2-4,14]。
在垂直监测昆虫雷达方面,2004年,程登发研究员引入垂直监测昆虫雷达的设计理念,与成都锦江电子有限公司合作,建造了中国第一台垂直监测昆虫雷达并开展了野外监测[48]。此后其他研究机构不断与成都锦江电子有限公司合作,开始尝试按照国际二代标准建造垂直监测昆虫雷达,目前正在试验之中。在二代垂直监测昆虫雷达研制方面,无锡立洋电子科技有限公司也获得重要进展,目前,建制的二代垂直监测昆虫雷达已经可以解算出相应参数,相关设备的外观正在优化之中。为了观测小型害虫,2006年,中国农业科学院植物保护研究所与成都锦江电子有限公司合作,自主建成了我国第一部8.8 mm的毫米波扫描昆虫雷达,该雷达自建成以后一直安放在湘桂走廊上的广西兴安县,用于监测研究褐飞虱、白背飞虱和稻纵卷叶螟等水稻害虫及其天敌的迁飞规律[16,49-50]。为了获得害虫在低空中的飞行参数,扩大雷达监测范围,增强雷达监测能力,2006年,南京农业大学与南京信息工程大学合作,研制了世界上第一台双基多普勒垂直监测昆虫雷达。该类型雷达的盲区缩短至约50 m,但目前可解算的目标参数还比较有限[51]。此外,在昆虫个体行为研究方面,2012年,长江大学桂连友教授引入了谐波雷达技术,对柑橘大实蝇Tetradacuscitri的活动节律、取食特点、交配规律等生活习性开展定量观察,以期为其综合防控提供科学依据[52]。浙江大学的研究团队通过与瑞典隆德大学(Lund University)合作开始利用激光雷达对空中目标进行精确判定[31]。
4 昆虫雷达技术进展
经过几十年的发展,昆虫雷达除在类型方面逐步多样化以外,在一些建制技术方面也取得了许多明显进步。
4.1 数字化昆虫雷达替代模拟昆虫雷达
模拟雷达是回波信号通过CRT显示器展现的一类雷达系统。模拟雷达CRT显示器的荧光屏不同于后期用于计算机终端的长方形CRT显示器。模拟雷达CRT显示器的荧光屏通常为圆形,且具备“长余辉”显示性能。模拟雷达CRT显示器的偏转线圈由相互垂直的X轴和Y轴两部分组成,当X和Y两个轴的偏转线圈上加同步的锯齿波电压时,就可以实现对电子束的控制,从而在CRT荧光屏上形成一条扫描线。进行PPI扫描时,分别对两路锯齿波电压进行方位角正弦分量和余弦分量的调制,荧光屏的扫描线就可以与天线同步运转扫描。与此同时,通过对CRT亮度进行调制,使之与回波强度正相关,这样就可以在CRT屏幕上显示雷达探测到的目标。根据上述工作原理可以发现,模拟雷达没有雷达信号的采集、处理和存储过程,信号存储需要录像机或照相机进行辅助存储。虽然模拟雷达没有直接的存储功能和分析功能,但回波的画面比较细腻。
随着集成电路技术和计算机软硬件技术的发展,20世纪80年代出现了较高性能的AD转换器件,可以将传统的模拟信号转换成数字信号。由于该工作体制的雷达其主要接口是数字信号,因此称为“数字化雷达”。数字化雷达与模拟雷达最大的区别是数字化雷达的数据可以通过专用软件将雷达数据进行存储、显示、运算与分析,计算机终端代替了模拟雷达的显示器。早期数字化雷达的缺点是由于受AD器件技术的影响,其采样精度和速度不是太高,所采集的数据存在一定误差,显示的画面也不够细腻。近年来,随着采样技术的提高,新研制的昆虫雷达都采用数字化技术,传统的模拟雷达也逐步进行数字化升级改造,数字化雷达已经取代了模拟昆虫雷达。
4.2 扫描昆虫雷达的自动伺服与分析能力大幅度提升
受伺服软硬件的影响,早期的扫描昆虫雷达,不适于长期自动运转,数据分析也需要耗费使用者大量的时间和精力[3-4,20]。2001年,程登发研究员成功开发了相应软件,实现了扫描昆虫雷达的数据采集与分析自动化,极大地推动了扫描昆虫雷达技术的发展。但是在伺服方面,仍然没有太多进展。借用天气雷达运转经验和早期扫描昆虫雷达采集分析程序的结构,2016年,无锡立洋电子科技有限公司开发了伺服程序,该程序可以自动按照设定的仰角进行扫描,并实现了3PPI图像的实时合成与存储。通过非实时程序,可以对数据进行进一步分析。目前,相关软件仍在不断优化之中。如果得以应用,扫描昆虫雷达的威力将会进一步显现,实用性更强。
4.3 多模式雷达融合技术不断推进
单一运转模式的昆虫雷达如扫描昆虫雷达和垂直监测昆虫雷达均各有优缺点[12]。理论上,单一模式的昆虫雷达,无论如何优化都无法消除其本身的不足,也无法实现相互取代。在同一站点架设相同频率体制不同的2部雷达工作,会产生频率干扰,同时成本也较高。如果两种模式能有机地融合为一体,实现多模式运转,昆虫雷达的威力将大幅度提高。“双模式昆虫探测雷达”是指利用一套收发、信号采集处理及终端系统实现扫描昆虫雷达和垂直监测昆虫雷达两种雷达所有的探测功能的新型昆虫探测雷达[53]。目前,无锡立洋电子科技有限公司在双模式昆虫雷达生产方面取得重要突破。2016年,该公司先后与北京市植物保护站、新疆师范大学等单位合作,研制生产出2部双模式探测昆虫雷达,相关雷达正在测试运转之中。
5 展望
从1968年世界上第一台昆虫雷达在英国诞生算起,雷达昆虫学已经有近50年的发展历程。在近50年的征程里,虽然雷达昆虫学在昆虫迁飞规律、个体觅食行为、定向行为等方面获得了一系列的重要成果,但是现有结论仍然很难满足农业害虫的定点、定时、定量测报需要,昆虫行为仍有许多待解之谜。在中国,近年来,迁飞性害虫频繁暴发。2008年,草地螟突袭北京,给粮食作物和正在筹备的奥运会带来了安全隐患[54]。2012年,华北、东北地区三代黏虫大发生,对秋粮生产构成了严重威胁[55]。2013年,二代黏虫在华北地区大暴发,直接对春玉米造成危害并影响夏播玉米的安全。害虫监测是预警的重要基础,在制定决策过程中发挥着重要作用。与本地害虫相比,迁飞性害虫面临的监测难度更大,迫切需要引入昆虫雷达等现代化手段[56]。昆虫雷达系统虽然源于常规雷达系统,但是仍存在诸多区别。在雷达昆虫学实践中,昆虫、雷达、计算机、气象等相关领域专家需加强合作,不断开展试验,共同提升昆虫雷达的制造、自动化数据采集分析与监测应用技术水平。在今后的昆虫雷达建制工作中,要积极利用行业技术进步,例如可以采用双极化技术提高目标识别能力[57-58],引入固态发射机,提升产品性能,降低运行成本。在数据采集方面,要测试高性能的AD采样技术,提升空间分辨率。同时,要积极推动自动化伺服技术和网络化雷达,奠定扫描昆虫雷达的推广应用基础。针对昆虫学研究方面的特殊需求,科研单位与生产企业要加强合作,在提升雷达目标的识别能力、缩短雷达盲区等方面不断努力。积极推进我国昆虫雷达监测网的建设,制定统一建设标准,扩大昆虫雷达在生产上的应用区域和范围。值得庆幸的是,相关方面已经取得一些重要进展,双路馈源技术、多模式融合、快速扫描等技术的出现已经为解决上述问题提供了崭新思路[59-60]。
在充分发挥昆虫雷达优势的同时,必须清醒地意识到昆虫雷达尚存在一些不足,虽然昆虫雷达与传统监测工具相比,取样范围有了显著增加,但还是远小于需要探测的区域范围。虽然垂直监测昆虫雷达可以获得监测对象的有用信息,但进行准确识别,还需要借助其他手段对监测目标等进行判断[61]。另外雷达设备较为昂贵,在昆虫雷达研究经费不足,技术不完善的情况下,还可以借鉴芬兰、美国等国家在天气雷达应用上取得的经验,积极探索天气雷达在害虫监测预警中的作用,为农业生产服务[4,62]。随着行业技术的进步,昆虫雷达在害虫监测预警和昆虫学行为研究方面的应用前景非常值得期待。
[1] 翟保平. 追踪天使——雷达昆虫学30年[J]. 昆虫学报, 1999, 42(3): 315-326.
[2] 程登发,封洪强,吴孔明. 扫描昆虫雷达与昆虫迁飞监测[M].北京: 科学出版社,2005.
[3] 封洪强.雷达昆虫学40年研究的回顾与展望[J].河南农业科学,2009(9):121-126.
[4] 封洪强.雷达在昆虫学研究中的应用[J].植物保护,2011,37(5):1-13.
[5] Crawford A. Radar reflections in the lower atmosphere [J]. Proceedings of Institute of Radio Engineers, 1949, 37: 404-405.
[6] Rainey R C. Observation of desert locust swarms by radar [J]. Nature, 1955, 175(4445): 77.
[7] Schaefer G. Radar observations of insect flight [M]∥Rainey R C,eds. Insect flight (Symposia of the Royal Entomological Society of London. No. 7, July 1976).Blackwell,Oxford:157-197.
[8] 翟保平. 昆虫雷达让我们看到了什么?[J].昆虫知识, 2005, 42(2): 217-226.
[9] Drake V A, Reynolds D R. Radar entomology: Observing insect flight and migration [M]. Wallingford, Oxfordshire, Boston: CABI, 2012.
[10] 翟保平. 昆虫雷达: 从研究型到实用型[J]. 遥感学报, 2001, 5(3): 231-240.
[11] 桂连友, 黄秀琴, 李传仁. 昆虫谐波雷达的发展和利用[J]. 应用昆虫学报, 2011, 48(3): 732-738.
[12] 张智,张云慧, 姜玉英, 等. 垂直监测昆虫雷达研究进展[J]. 昆虫学报, 2012, 38(5):1-8.
[13] Brydegaard M, Guan Z, Wellenruther M, et al. Insect monitoring with fluorescence lidar techniques: feasibility study[J]. Applied Optics, 2009, 48(30): 5668-5677.
[14] Cheng Dengfa, Wu Kongming, Tian Zhe, et al. Acquisition and analysis of migration data from the digitised display of a scanning entomological radar [J].Computers and Electronics,2002,35(2/3):63-75.
[15] Riley J R. A millimetric radar to study the flight of small insects [J]. Electronics & Communication Engineering Journal, 1992, 4(1): 43-48.
[16] 杨秀丽, 陈林, 程登发. 毫米波扫描昆虫雷达空中昆虫监测的初步应用[J]. 植物保护,2008,34(2): 31-36.
[17] Chapman J W, Smith A D, Woiwod I P, et al. Development of vertical-looking radar technology for monitoring insect migration[J]. Computers and Electronics in Agriculture,2002,35(2/3):95-110.
[18] Smith A D, Riley J R, Gregory R D. A method for routine monitoring of the aerial migration of insects by using a vertical-looking radar [J].Philosophical Transactions of the Royal Society of London. Series B: Biological Sciences, 1993, 340(1294): 393-404.
[19] Smith A D, Riley J R. Signal processing in a novel radar system for monitoring insect migration [J]. Computers and Electronics in Agriculture, 1996, 15(4): 267-278.
[20] Drake V A. Insect-monitoring radar: a new source of information for migration research and operational pest forecasting [M]∥Corey S A,Dall D J,Milen W M, eds. Pest Control and sustainable agriculture. Melbourne:CSIRO Publications,1993: 452-455.
[21] Drake V A, Wang H K, Harman I T. Insect monitoring radar: remote and network operation[J]. Computers and Electronics in Agriculture, 2002,35(2/3): 77-94.
[22] Chapman J W, Reynolds D R, Smith A D. Vertical-looking radar: a new tool for monitoring high-altitude insect migration[J]. Bioscience,2003,53(5): 503-511.
[23] Drake V A, Harman I T, Wang H K. Insect monitoring radar: stationary-beam operating mode [J]. Computers and Electronics in Agriculture, 2002, 35(2/3): 111-137.
[24] Smith A D, Reynolds D R, Riley J R. The use of vertical-looking radar to continuously monitor the insect fauna flying at altitude over southern England[J]. Bulletin of Entomological Research, 2000,90(3): 265-277.
[25] Riley J R, Smith A D, Reynolds D R. The feasibility of using vertical-looking radar to monitor the migration of brown planthopper and other insect pests of rice in China [J]. Entomologia Sinica, 2003, 10(1): 1-19.
[26] Boiteau G, Colpitts B. The potential of portable harmonic radar technology for the tracking of beneficial insects [J]. International Journal of Pest Management, 2004, 50(3): 233-242.
[27] Mascanzoni D, Wallin H. The harmonic radar: a new method of tracing insects in the field[J]. Ecological Entomology, 1986,11(4): 387-390.
[28] Lihoreau M, Raine N E, Reynolds A M, et al. Radar tracking and motion-sensitive cameras on flowers reveal the development of pollinator multi-destination routes over large spatial scales[J]. PLoS Biology, 2012,10(9): e1001392. doi:10.1371/journal.pbio.1001392.
[29] Colpitts B G, Boiteau G. Harmonic radar transceiver design: miniature tags for insect tracking[J]. IEEE Transactions on Antennas and Propagation, 2004, 52(11): 2825-2832.
[30] Riley J R, Smith A D, Reynolds D R, et al. Tracking bees with harmonic radar [J]. Nature, 1996, 379(6560): 29-30.
[31] Mei Liang, Guan Zuguang, Zhou H J, et al. Agricultural pest monitoring using fluorescence lidar techniques [J]. Applied Physics B: Lasers and Optics, 2012,106:733-740.
[32] 俞小鼎,姚秀萍,熊廷南,等.多普勒天气雷达原理与业务应用[M].北京:气象出版社, 2006.
[33] Contreras R F, Frasier S J. High-resolution observations of insects in the atmospheric boundary layer [J].Journal of Atmospheric and Oceanic Technology, 2008, 25(12): 2176-2187.
[34] Riley J R, Reynolds D R. Radar-based studies of the migratory flight of grasshoppers in the middle Niger area of Mali [J]. Proceedings of the Royal Society of London. Series B. Biological Sciences, 1979, 204(1154): 67-82.
[35] Chapman J W, Reynolds D R, Smith A D, et al. High-altitude migration of the diamondback mothPlutellaxylostellato the UK: a study using radar, aerial netting, and ground trapping[J]. Ecological Entomology, 2002,27(6): 641-650.
[36] Chapman J W, Reynolds D R, Hill J K, et al. A seasonal switch in compass orientation in a high-flying migrant moth[J]. Current Biology, 2008,18(19): R908-R909.
[37] Jeffries D L, Chapman J, Roy H E, et al. Characteristics and drivers of high-altitude ladybird flight: insights from vertical-looking entomological radar[J]. PLoS ONE, 2013, 8(12): e82278. doi:10.1371/journal.pone.0082278.
[38] Drake V A. Target density estimation in radar biology[J]. Journal of Theoretical Biology, 1981, 90(4): 545-571.
[39] Drake V A, Farrow R A. The nocturnal migration of the Australian plague locust,Chortoicetesterminifera(Walker) (Orthoptera: Acrididae): quantitative radar observations of a series of northward flights[J]. Bulletin of Entomological Research, 1983, 73(4): 567-585.
[40] Beerwinkle K R, Witz J A, Schleider P G, et al. An automated, vertical looking, X-band radar system for continuously monitoring aerial insect activity [J].Transactions of the ASAE, 1993, 36(3): 965-970.
[41] Beerwinkle K R, Lopez J D, Schleider P G, et al. Annual patterns of aerial insect densities at altitudes from 500 to 2400 meters in East-Central Texas indicated by continuously-operating vertically-oriented radar[J]. Le Développement Psychique Précoce,1995,20(3):223-254.
[42] Boiteau G, Vincent C, Meloche F, et al. Harmonic radar: assessing the impact of tag weight on walking activity of colorado potato beetle,Plumcurculioand western corn rootworm[J]. Journal of Economic Entomology, 2010, 103(1): 63-69.
[43] Chen R L, Bao X Z, Drake V A, et al. Radar observations of the spring migration into northeastern China of the oriental armyworm moth,Mythimnaseparata, and other insects [J]. Ecological Entomology, 1989, 14(2): 149-162.
[44] 陈瑞鹿,暴祥致,王素云, 等. 草地螟迁飞活动的雷达观测[J]. 植物保护学报, 1992, 19(2):171-174.
[45] Feng Hongqiang, Wu Kongming, Cheng Dengfa, et al. Radar observations of the autumn migration of the beet armywormSpodopteraexigua(Lepidoptera: Noctuidae) and other moths in northern China [J]. Bulletin of Entomological Research, 2003,93(2): 115-124.
[46] Feng Hongqiang, Wu Kongming, Ni Yunxia, et al. High-altitude windborne transport ofHelicoverpaarmigera(Lepidoptera: Noctuidae) in mid-summer in northern China [J]. Journal of Insect Behavior, 2005, 18(3): 335-349.
[47] Fu Xiaowei, Liu Yongqiang, Li Chao, et al. Seasonal migration ofApolyguslucorum(Hemiptera: Miridae) over the Bohai Sea in Northern China [J]. Journal of Economic Entomology, 2014, 107(4): 1399-1410.
[48] 张云慧, 乔红波, 程登发, 等.垂直监测昆虫雷达空中昆虫监测的初步应用[J]. 植物保护, 2007, 33(3): 23-26.
[49] 齐会会, 张云慧,蒋春先, 等. 广西东北部稻区白背飞虱早期迁入虫源分析[J].中国农业科学, 2011, 44(16):3333-3342.
[50] 蒋春先,杨秀丽,齐会会,等.中国华南地区稻纵卷叶螟迁飞的一次雷达观测[J].中国农业科学,2012, 45(23):4808-4817.
[51] 高月波,陈晓,陈钟荣,等. 稻纵卷叶螟(Cnaphalocrocismedinalis)迁飞的多普勒昆虫雷达观测及动态[J]. 生态学报,2008, 28(11):5238-5247.
[52] 罗杰,桂连友,Gilles B,等. 昆虫谐波雷达在柑橘大食蝇行为学上的应用研究[J]. 环境昆虫学报, 2016, 38(3):514-521.
[53] 张鹿平.具有综合探测性能的昆虫探测雷达天线馈线系统:中国,2016 2 0016654.8 [P].2016-07-06.
[54] 张云慧, 杨建国, 金晓华,等. 探照灯诱虫带对迁飞草地螟的空中阻截作用[J]. 植物保护, 2009, 35(6):104-107.
[55] 张云慧, 张智, 姜玉英,等. 2012年三代黏虫大发生原因初步分析[J]. 植物保护, 2012, 38(5): 1-8.
[56] 张智,张云慧,姜玉英,等.我国昆虫雷达发展现状与应用展望[J]. 中国植保导刊,2017,37(4):27-32.
[57] Zrnic D S, Ryzhkov A V. Observations of insects and birds with a polarimetric radar [J]. IEEE Transactions on Geoscience and Remote Sensing, 1998,36(2): 661-668.
[58] Bachmann S, Zrnic D. Spectral density of polarimetric variables separating biological scatterers in the VAD display[J]. Journal of Atmospheric and Oceanic Technology, 2007, 24(7): 1186-1198.
[59] 张鹿平. 用机械式圆锥扫描波束对高速移动目标实现探测的方法:中国,2011 1 0118072.2[P].2013-05-09.
[60] 张鹿平. 用双路馈线实现大功率雷达近距离探测的系统.实用新型专利:中国, 201320839742.4[P].2013-12-18.
[61] Drake V A, Wang Haikou. Recognition and characterization of migratory movements of Australian plague locusts,Chortoicetesterminiferawith an insect monitoring radar [J]. Journal of Applied Remote Sensing,2013, 7(1):075095.
[62] Nieminen M, Leskinen M, Helenius J. Doppler radar detection of exceptional mass-migration of aphids into Finland [J]. International Journal of Biometeorology, 2000,44(4): 172-181.
(责任编辑: 田 喆)
Developmentofradarentomologyandrelatedprospectsforfutureapplication
Zhang Zhi1,2, Zhang Yunhui1, Jiang Yuying3, Zhang Luping4, Cheng Dengfa1
(1.StateKeyLaboratoryforBiologyofPlantDiseasesandInsectPests,InstituteofPlantProtection,ChineseAcademyofAgriculturalSciences,Beijing100193,China; 2.BeijingPlantProtectionStation,Beijing100029,China;3.NationalAgro-TechnicalExtensionandServiceCentre,Beijing100025,China;4.WuxiLiyangElectronicTechnologyCo.,Ltd,Wuxi214028,China)
Many important achievements have been made in radar entomology with the efforts of several generations of entomologists after nearly 50 years’ development since 1968. For promoting the development of radar entomology in China, in this review, features and functions of main entomological radar, the discrimination between weather radar and entomological radar of similar type, the history of practice in radar entomology in serval important countries and progresses in the construction of entomological radar were presented. Finally, the proposals and prospects for the construction and application of entomological radar were summarized in this article.
entomological radar; scanning entomological radar; vertical-looking insect radar; insect harmonic radar; lidar; pest monitoring; building technology
S 431.9
: ADOI: 10.3969/j.issn.0529-1542.2017.05.003
2017-07-18
: 2017-08-03
北京市科技创新驱动发展投入项目(PXM2016_036203_000049);国家自然科学基金(31571998)
* 通信作者 E-mail:yhzhang@ippcaas.cn
猜你喜欢
玩具世界(2022年3期)2022-09-20
云南电力技术(2021年6期)2022-01-18
法医学杂志(2021年3期)2021-12-03
林业科学(2021年4期)2021-05-21
甘肃教育(2020年2期)2020-09-11
阅读(快乐英语高年级)(2020年3期)2020-07-16
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
小学生必读(低年级版)(2018年11期)2018-03-13