失电制动器抱闸力矩指标的应用分析
2017-10-09 06:08吕向阳
雷达与对抗 2017年3期
吕向阳
(中国船舶重工集团第七二四研究所,南京 211153)
失电制动器抱闸力矩指标的应用分析
吕向阳
(中国船舶重工集团第七二四研究所,南京 211153)
介绍了舰载雷达中失电制动器抱闸力矩指标的使用期望,通过对失电制动器的静摩擦力矩和动摩擦力矩测量数据的分析得到了其使用的3点结论,为合理选择满足使用要求的失电制动器提供了技术依据。
动摩擦力矩;静摩擦力矩;抱闸;动静摩擦力矩比
Abstract: The application requirements of the brake torque indexes of the power-off brake are introduced in shipborne radars. Three conclusions are drawn through the analysis of the measured data of the kinetic and static friction torque of the power-off brake, providing a technical base for appropriate selection of the power-off brake that meets the application requirements.
Keywords: kinetic friction torque; static friction torque; brake; kinetic-to-static friction torque ratio
0 引 言
纵摇和横摇两轴稳定结构的舰载雷达天线机电稳定平台,其纵摇、横摇伺服运动分别用于克服舰船的纵摇摆、横摇摆,其机械传动装置输入端采用电动机提供原动力。电动机的抱闸形式采用失电制动器,结构简洁紧凑,使用方便可靠。在断电情况下,失电制动器抱住电机轴,使其保持不动,从而使天线稳定平台不摇摆,平台框架与舰甲板保持水平。失电制动器的抱闸力矩分为静态和动态,指标的合理性直接影响其在舰载雷达中的使用效果。
1 失电制动器的工作原理
当制动器线圈通电时,线圈产生磁场使衔铁盘吸向磁轭,衔铁盘与制动盘脱离。当线圈断电时,磁通消失,衔铁盘被释放,弹簧施压于衔铁盘,将制动盘压紧,由摩擦力产生制动力矩达到制动的目的。由于制动力矩由摩擦面产生,因此失电制动器一般只用于保持状态工作,而不能用于强制停止机器运动。处于运动状态的机器必须先减速,待运动停止后再行抱闸。
2 舰载雷达中失电制动器抱闸力矩指标的使用要求
衡量失电制动器制动效能的一个重要指标是它的抱闸力矩。在单位抱闸制动片面积上产生的抱闸力矩越大失电制动器技术水平越高,所以在失电制动器设计、制造行业中一般只规定某型号失电制动器的抱闸力矩下限值,即在一定抱闸摩擦片面积的情况下其最低产生多大的抱闸力矩值。一旦失电制动器的摩擦片尺寸定下来,其抱闸力矩的下限值也就基本确定。但是,上限值受到内部弹簧性能的影响,变化范围较大,一般不作规定,即无上限要求。通常上限值是下限值的1.5~3倍。失电制动器工作时要求电机轴处于静止状态下,即松开抱闸或抱闸都是在电机轴不转动的情况下。如果在电机轴运转下断电抱闸,会导致摩擦片磨损,抱闸力矩下降,严重时摩擦片磨平打滑失去制动效能。
在雷达天线系统中采用失电制动器作抱闸的电动机。正常工作模式下,平台开关机时,电机轴在抱闸松开后转动,在电机轴停止运动后抱闸,始终使失电制动器在电机轴静止状态下工作。然而,在实际工作中偶尔会出现设备突然断电、此时电机轴处在高速转动中失电制动器抱闸的情况。从设备保护安全使用考虑,希望尽量减小抱闸对机械传动结构的冲击,必要时宁可失电制动器摩擦片损坏也不能对机械传动机构形成大的冲击,避免造成严重事故。因此,从雷达天线稳定转台使用角度考虑,一定规格下的失电制动器静态抱闸力矩尽可能大,动态抱闸力矩要尽量小,并且在经过几次动态抱闸冲击后其静态抱闸力矩仍能保持在原先的数值附近,不要下降太多,继续保持抱闸效能。
3 失电制动器静态、动态摩擦力矩测量方法
失电制动器报闸力矩的测量方法通常采用天平法和测功法两种。天平法只能测量静态摩擦力矩,测量精度高。测功法可以测量静态摩擦力矩和动态摩擦力矩,测量范围广。
3.1 天平法:静态摩擦力矩测量
首先将被测失电制动器安装到一台电动机后端轴上,失电制动器不通电。在电机轴头上安装辅助工装支架,支架力臂长L,在称盘上放标准秤砣。当电机轴头转动时,停止放标准秤砣。此时,将标准秤砣数值相加后得到∑,则静态摩擦力矩=∑(kg)×9.8(N/kg)×L(m)。
3.2 测功法:动(静)态摩擦力矩测量
测功法安装连接图如图1所示。
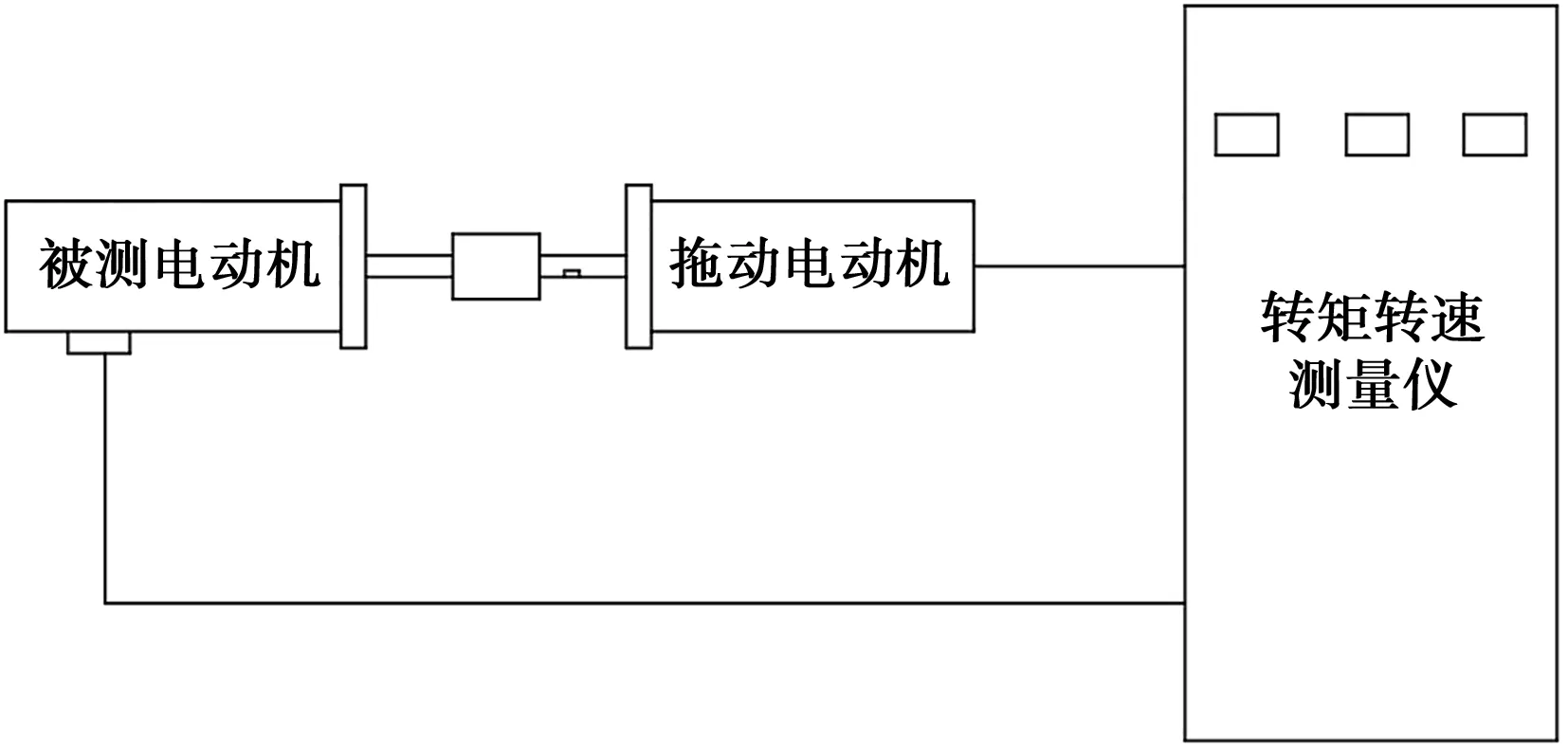
图1 测功法安装连接图
将被测失电制动器安装到一台电动机后端轴上,然后将电动机安装到转矩转速测量仪上面。
(1) 被测失电制动器不通电,被测电动机轴被抱闸抱住无法旋转。此时,用计算机通过通讯软件与电机驱动器建立通讯,然后输入电机低速转动命令,观察测量仪转矩读数。当电机轴转动瞬间时,转矩读数会突然发生较大的跃变,迅速输入电机停止命令,电机停止转动,读取跃变前测量仪转矩读数,此即为测功法测量的失电制动器静态摩擦力矩。
(2) 去除计算机,被测失电制动器加电,抱闸松开。测量仪带动电机按照设定的转速运转,待转速稳定运转一段时间后切断被测失电制动器供电,失电制动器抱闸,同时读取测量仪转矩读数,此即为测功法测量的失电制动器动态摩擦力矩。
4 失电制动器静、动态摩擦力矩试验测量策略
为了保证试验数据的有效性、可比性和代表性,试验选取两种抱闸力矩规格(8 Nm和15 Nm)的典型失电制动器。每种规格随机选取两只作为样品,并且结合使用两种测量方法(天平法和测功法)进行测量,制定如下的测量策略。每只样品将获得一组测量数据用于分析。
(1) 在被测失电制动器动态抱闸前,天平法测量静态摩擦力矩;
(2) 在被测失电制动器动态抱闸前,测功法再次测量静态摩擦力矩,与天平法测量的静态摩擦力矩值进行对比参考;
(3) 在不同转速下,测功法测量被测失电制动器的动态摩擦力矩;
(4) 在被测失电制动器动态抱闸后,测功法测量静态摩擦力矩;
(5) 在被测失电制动器动态抱闸后,天平法再次测量静态摩擦力矩。
5 测量数据及分析
将15 Nm (1#、2#)、8 Nm (3#、4#)4只样品低速磨合后试验测量数据如表1。样品动、静态摩擦力矩变化曲线图如图2、图3、图4和图5。
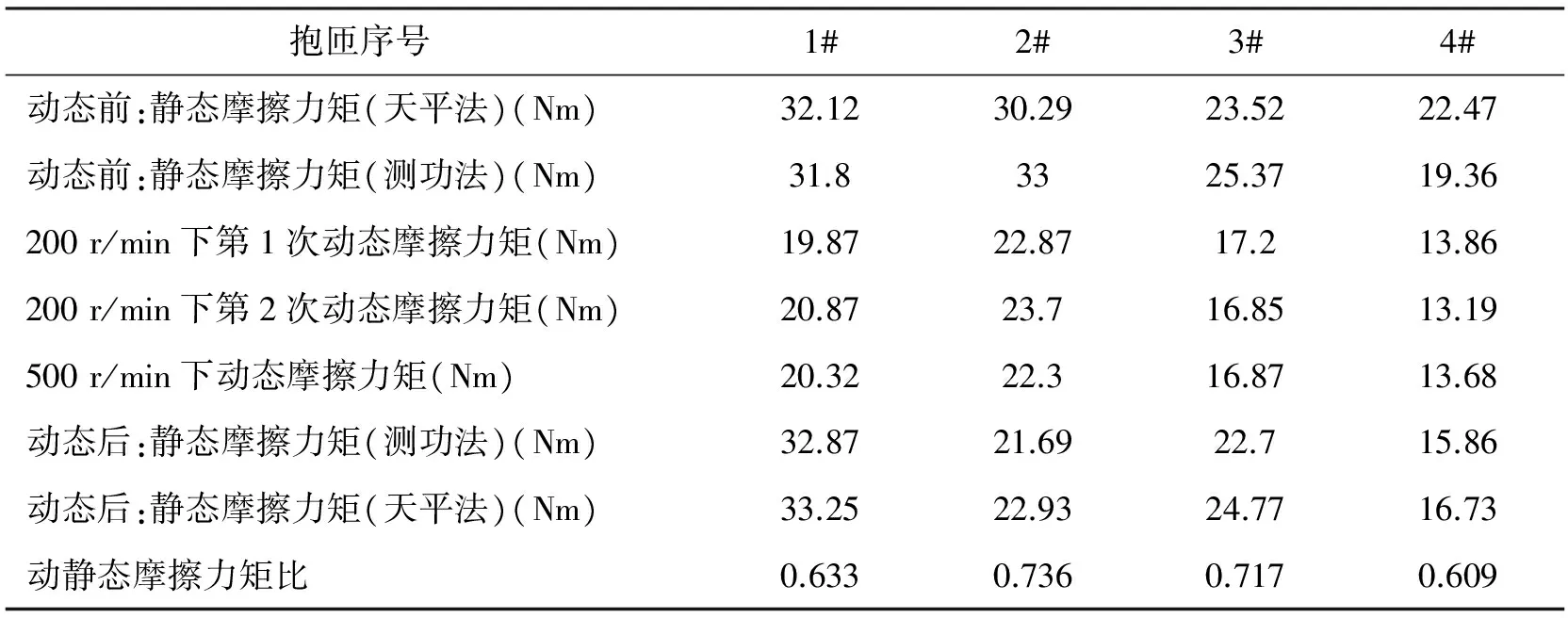
表1 4只样品试验测量数据
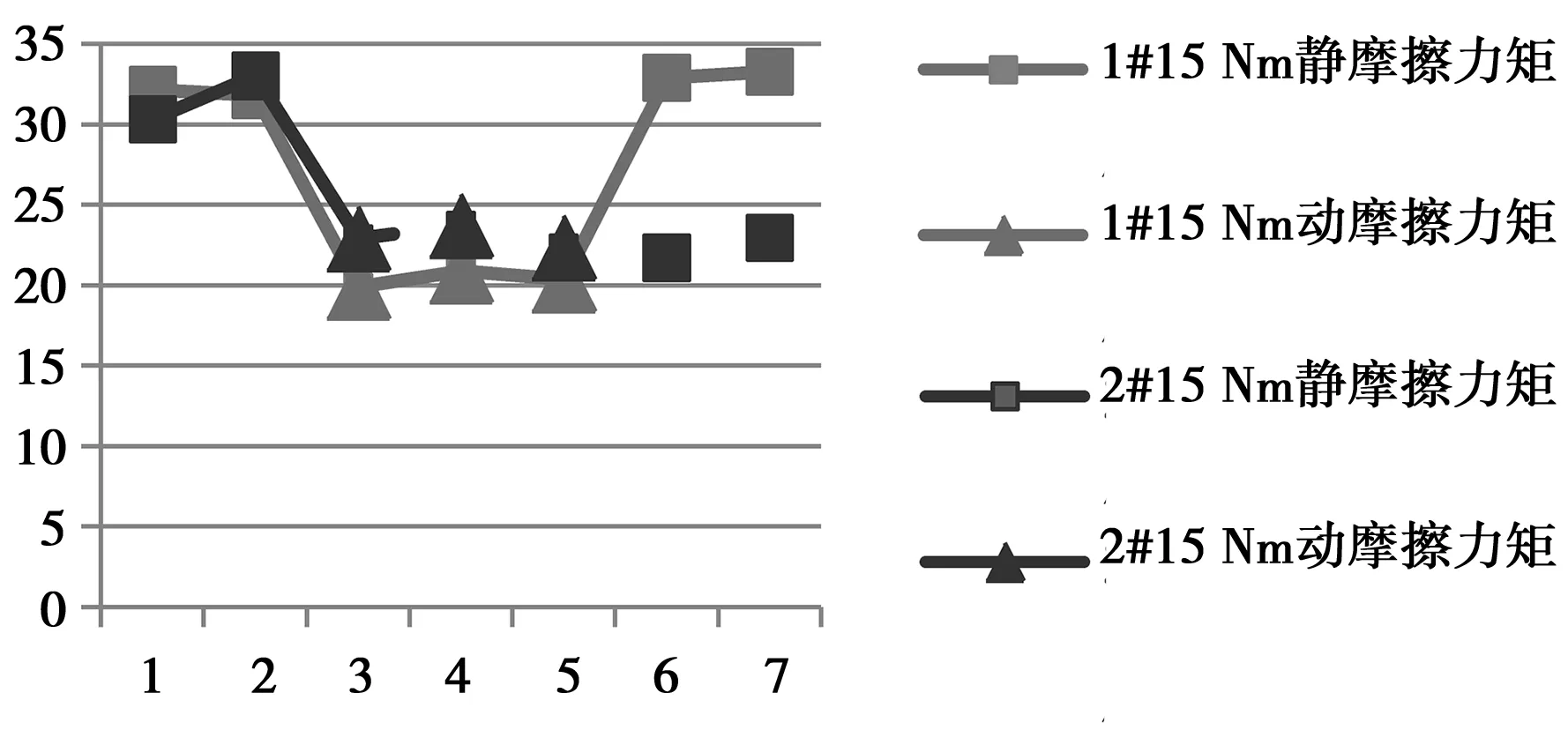
图2 15 Nm 1#和2#被测失电制动器的动、静态摩擦力矩变化曲线图
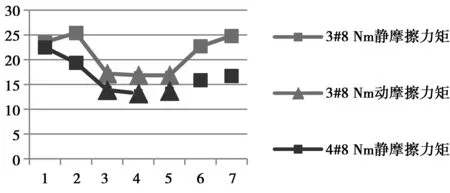
图3 8 Nm 3#和4#被测失电制动器的动、静态摩擦力矩变化曲线图
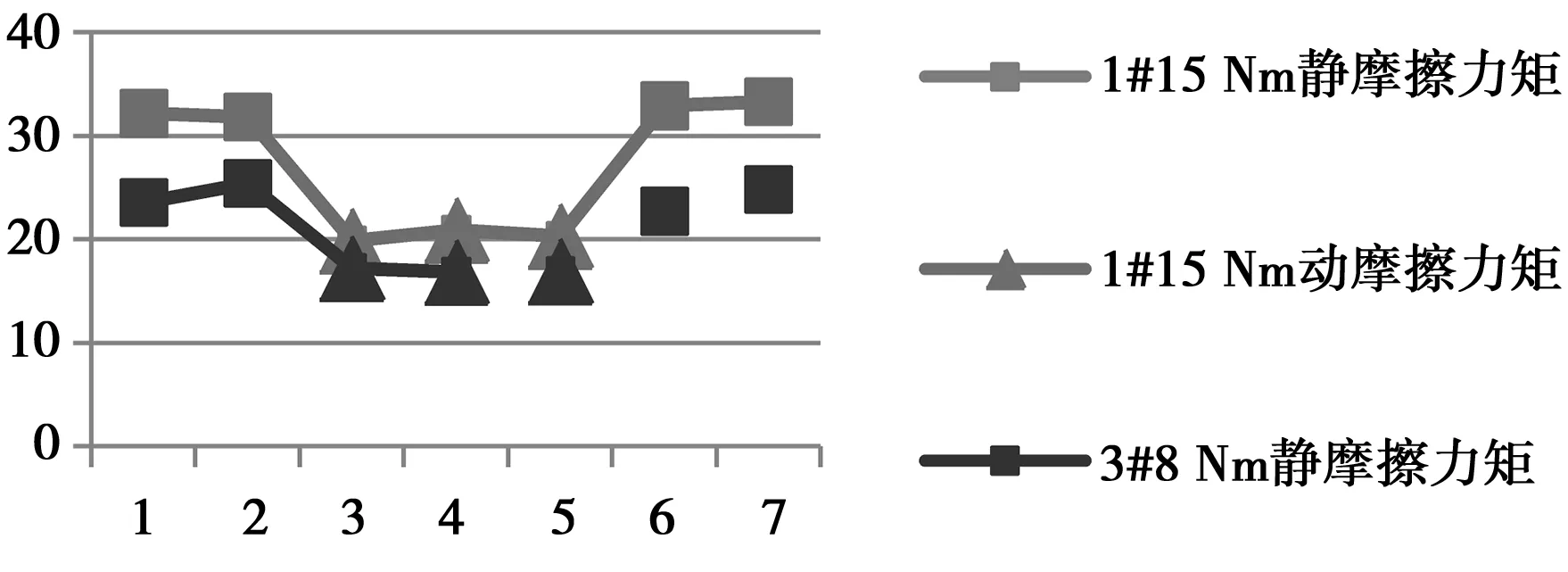
图4 1#和3#被测失电制动器的动、静态摩擦力矩变化曲线图
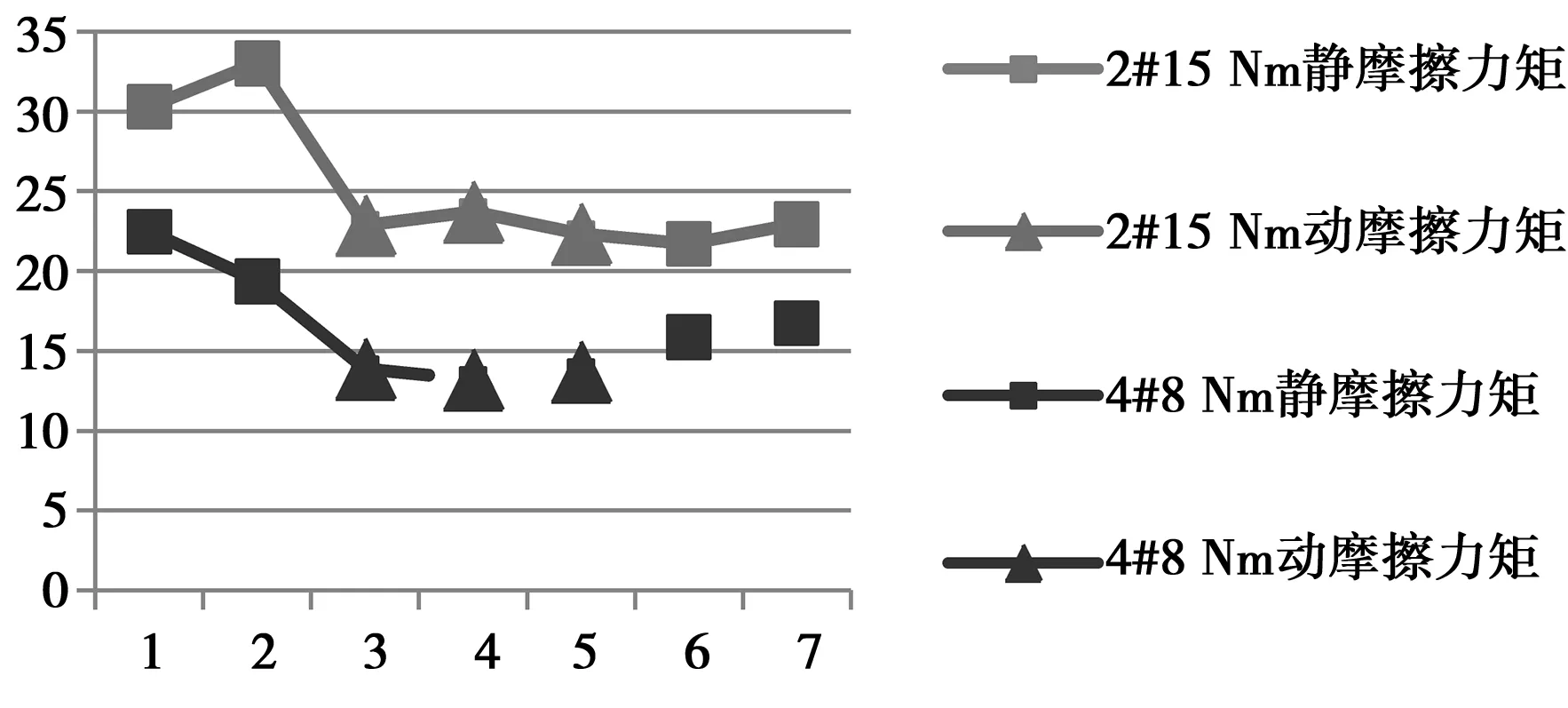
图5 2#和4#被测失电制动器的动、静态摩擦力矩变化曲线图
从表1和图2~图5的被测失电制动器动静态摩擦力矩变化曲线图看:
(1) 在新生产失电制动器首次磨合后,摩擦力矩会大幅提高,8 Nm规格失电制动器的静摩擦力矩达到20 Nm以上,15 Nm规格失电制动器的静摩擦力矩达到30 Nm以上。这说明失电制动器的静摩擦力矩上限值的范围较大。
(2) 在200和500 r/min下,每只样品的动摩擦力矩相差不大,说明动摩擦力矩与转速无关,取500 r/min下动摩擦力矩作为计算值。通过天平法和测功法两种方法测量的静态摩擦力矩值相差不大,差值<3 Nm。由于天平法测量的精度较高,取天平法测量的静摩擦力矩作为计算值。计算得动摩擦力矩与静摩擦力矩的比值在0.6~0.8之间。
(3) 将1#(15 Nm)和3#(8 Nm)失电制动器的数据整理后发现,其动静摩擦力矩变化曲线符合“浴盆曲线”(如图6所示),是满足雷达使用期望的类型,表明动静态摩擦力矩值相差较大,在经过少量几次的动态抱闸冲击后仍能维持原先较好的静摩擦力矩,与动态前的静态摩擦力矩相差不大,仍能维持抱闸效能。
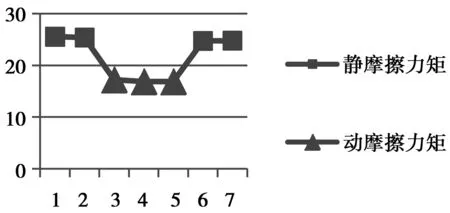
图6 被测失电制动器的动、静态摩擦力矩变化曲线——浴盆曲线
(4) 将2#(15 Nm)和4#(8 Nm)失电制动器的数据整理后发现,其动静摩擦力矩变化曲线不符合“浴盆曲线”。为了描述形象,对应的称其为“铲子曲线”(如图7所示),是不符合雷达使用期望的类型,在经过少量几次的动态抱闸冲击后已经不能维持原先的静态摩擦力矩。静态摩擦力矩值与动态摩擦力矩值接近,表示失电制动器的摩擦片磨损严重,抱闸效能下降。
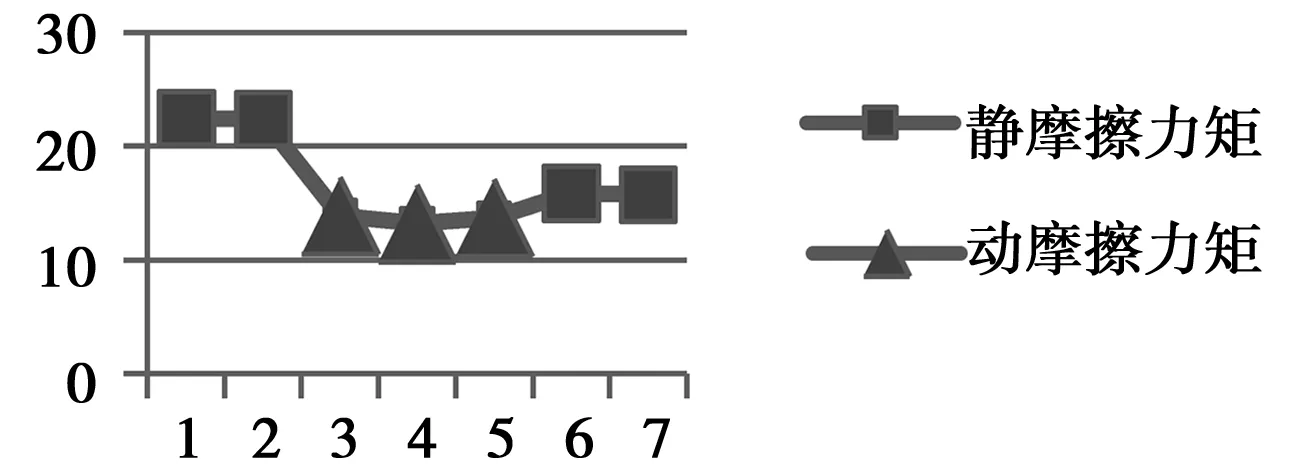
图7 被测失电制动器的动、静态摩擦力矩变化曲线——铲子曲线
(5) 上述两种形式的变化曲线并不是对立的两种形态,而是少数失电制动器由于摩擦片在经过少量几次动态抱闸冲击后相当于再次短暂经历低速磨合过程的一种体现。此过程后摩擦片接触面积继续增大,静摩擦力矩会比先前的增大。这一点从测量的数值中也可以观察到。当经历多次动态抱闸冲击后,其摩擦片表面磨平,接触面积下降,静摩擦力矩下降,其下降的幅度取决于接触面积下降的幅度。最终,摩擦片彻底失效,失去抱闸效能,失电制动器报废。因此,失电制动器的动静摩擦力矩变化曲线趋势图如图8所示,先短暂经历“浴盆曲线”然后反复经历“铲子曲线”。
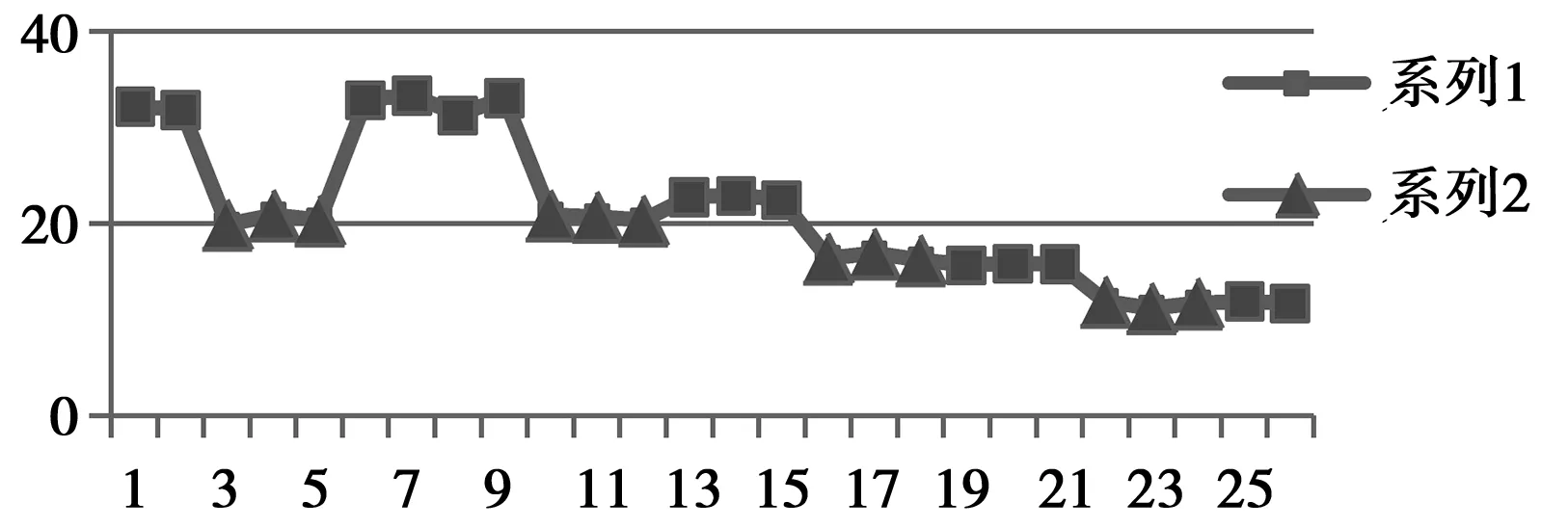
图8 被测失电制动器的动、静态摩擦力矩变化曲线趋势图
6 结束语
通过对测量数据的分析,结合舰载雷达的使用期望及失电制动器的技术状态,可以得到以下结论:
(1) 在考虑失电制动器的动态/静态摩擦力矩比的技术指标时,动静摩擦力矩比应控制在0.6~0.8。
(2) 通过低速磨合后,新生产的失电制动器的静摩擦力矩值可达到标称值的1.5倍以上,高者可达3倍;同时由于动静摩擦力矩比不低于0.6,动摩擦力矩值也可能大于标称值。这在选用时需加以考虑。
(3) 新生产的失电制动器低速磨合后,选择动静摩擦力矩比在0.6~0.7,符合“浴盆曲线”的失电制动器,满足雷达使用的最优期望。
[1] 科尔摩根电机使用手册[M].天津科尔摩根有限公司,2008.
[2] 吴义荣.浅谈数控机床的抱闸控制[J].金属加工(冷加工),2010(19).
Application analysis of brake torque indexes of power-off brake
LYU Xiang-yang
(No.724 Research Institute of CSIC, Nanjing 211153)
TN957.8
A
1009-0401(2017)03-0056-04
2017-06-03;
2017-06-15
吕向阳(1975-),男,高级工程师,研究方向:雷达伺服。
猜你喜欢
机电信息(2022年9期)2022-05-07
老年医学研究(2021年5期)2022-01-19
祝您健康(2019年2期)2019-02-18
汽车零部件(2017年2期)2017-04-07
运动(2016年6期)2016-12-01
汽车维护与修理(2016年1期)2016-11-27
汽车科技(2015年1期)2015-02-28
汽车零部件(2014年5期)2014-11-11
汽车零部件(2014年5期)2014-11-11
人民交通(2012年5期)2012-10-26