
基于下垂控制的微网并网主动同步控制策略
2017-09-29 01:25丁晓薇匡洪海郑丽平李圣清
分布式能源 2017年4期
丁晓薇,匡洪海,郑丽平,汪 宝,李圣清
(湖南工业大学电气与信息工程学院,湖南 株洲 412000)
基于下垂控制的微网并网主动同步控制策略
丁晓薇,匡洪海,郑丽平,汪 宝,李圣清
(湖南工业大学电气与信息工程学院,湖南 株洲 412000)
为了加强微网与电网并网的可靠性,实现孤网切换至并网运行的平滑性,以对等控制体系下的微网为背景,针对微网与电网同步问题,提出了基于下垂控制的主动同步控制策略。该方法在传统下垂控制上增加了功率给定,实现了微网的有功与无功功率、电压与频率间独立解耦,通过三相锁相环(sampled phase-locked loop,SPLL)输出电网电压幅值和相位,实现了电网电压同步;通过下垂控制输出积分,得到微网接口逆变器电压相位,再利用比例积分(proportional integral,PI)调节器进行无差控制,从而实现微网并网运行前的幅值、频率和相位主动同步。最后在Matlab/Simulink环境下进行了仿真,仿真结果表明了该控制策略的有效性和可行性。
微网;下垂控制;主动同步;逆变器
0 引言
微网属于小型低压发配电网络,由负荷、微电源、蓄能装置和控制系统组成,通过公共连接点(point of common coupling,PCC)可实现孤网运行和并网运行的切换[1]。随着微网并入电网的容量不断提高,频率、幅值和相角的同步问题更是受到了全球学者的关注[2]。
微网与电网同步是保证微网并网运行稳定的重要前提[3]。孤网运行时下垂控制通过一次调压、调频,其输出电压相位、频率与幅值均会与电网电压偏离,因此,微网母线电压与电网电压在并网前要进行主动同步[4]。文献[5]给出了3种并网方法: 主动同步、被动同步和停机转换。其中,主动同步通过控制机理主动调节微网与电网电压的同步追踪,快速且有效地解决主动同步问题[6]。
文献[7]提出一种微网孤网运行时电压-频率的控制策略;文献[8]为解决直流母线电压稳定问题,提出了基于下垂控制法的逆变器控制策略,利用逆变器改变频率来调节输出有功功率,改变电压幅值来实现输出无功功率,但由于微网中的分布式电源(distributed generation,DG)在并网运行时采用下垂控制需要向电网持续进行功率输出,难以解决主动同步问题,因此本文对下垂控制进行了改进。文献[9]提出基于虚拟功率的下垂控制策略,将实际的有功和无功功率转换为虚拟功率;文献[10]在文献[9]的基础上,提出基于虚拟频率-电压的下垂控制,而此方法要求微网中并联逆变器达到相同转换角,可行性比较低。因此,为更好实现微网安全稳定并入电网,本文提出适用于下垂控制的微网并网主动同步控制策略,将主动同步控制产生的相角运行至下垂控制中并达到同步,再进行孤网至微网并网模式运行的平稳切换。
1 微网控制
微网在大电网体系中被称为“模范公民”,具有能够为电网提供辅助操作的特点。典型微网结构如图1所示,发电系统发出非工频能量通过整流成直流能量,再通过逆变器逆变成工频能量后,供给负荷使用和并网需求。其中蓄电池、负荷和电网相联,微网内3条馈线中,馈线A和B接重要负荷,馈线C接普通负荷,当电网发生故障时,断开静态开关,微网切换至孤网模式运行,微网中馈线A上和馈线B上的重要负荷供电无间断,从而保证了供电可靠性。

图1 典型微网结构Fig.1 Typical microgrid structure
1.1微网的单元级控制
单元级控制主要针对逆变器作为接口的DG,逆变器的控制方法有:下垂控制、恒压恒频控制(V/f控制)和恒功率控制(PQ控制)。
下垂控制是DG接口逆变器模仿传统同步发电机,其中电压幅值和频率要让检测逆变器输出的有功和无功功率来进行调节,每台DG都能让负荷功率得到合理分配。
1.2微网的系统级控制
系统级控制分为主从控制和对等控制。主从控制主要是由单台或多台DG做主控电源,从属单元由其他电源进行控制。当微网处于主从控制时,要主动为从动提供电压和频率参考,系统级电压调节太依赖于主控单元,该控制降低了系统的稳定性。
对等控制指微网中每台DG均平等控制,各单元没有从属关系,能利用本地信息进行控制。文献[11]中提出了“即插即用”的功能,而在微网中只有对等控制能实现这一功能。
文献[12-13]中微网系统级采用对等控制、逆变器单元级采用下垂控制,验证了微网在孤网和并网两模式下能实现平稳切换。本文基于采用对等控制体系的改进下垂控制器设计,来研究微网并网的主动同步控制问题。
2 微网控制器设计
2.1下垂控制策略
下垂控制的工作原理与传统电力系统频率的一次调频相似,逆变器单元通过下垂控制得到输出电压幅值和频率,然后各自反向微调达到系统有功和无功功率的合理分配。
本文以Pf/QV的下垂控制为研究基础,在传统下垂控制策略上增加了功率给定控制,其中关于Pf/QV的下垂特性式为:
(1)
式中:m、n分别为Pf/QV的下垂特性系数;fn为电网额定频率;Pn为DG接口逆变器在额定频率下输出有功功率;U0为输出无功功率为0时的电压幅值;P、Q分别为DG输出有功和无功功率。其中,m和n为:
(2)
对应的下垂特性曲线如图2所示。

图2 下垂特性曲线Fig.2 Droop characteristic curve

图3 对等控制下的微网结构Fig.3 Microgrid structure under peer to peer control
当DG输出有功功率P较大时,利用P-f的下垂特性增大输出频率,减小其输出P;当DG的输出P较小时,则特性减小输出频率,从而使其输出P增大。同理,对DG输出无功功率Q,经反复调节,使系统达到最小环流点。
2.2对等控制
微网的对等控制如图3所示,每台DG通过线路阻抗Zlinen并联运行,微网通过PCC处开关与公共配电网连接,当并网开关断开或闭合时微网分别运行在孤网或并网模式下,静态开关与电网相连,微网并网运行时,下垂控制器中参考电压的幅值和频率均与电网电压额定值相等。
2.3主动同步控制
微网在孤网模式下运行时,DG带负荷运行,其输出电压幅值和频率可能与其额定值有一定偏差,所以,微网并网前要缩小并网点两端的差值来避免并网运行时产生的电流冲击。当电压频率、相角和幅值都达到并网主动同步参数要求时,微网就能与电网稳定并网[14]。
文献[15]介绍了1种频率和相角分时段调节的同步方法,为稳定相角差,首先进行频率的同步,再以固定的频率扰动进行相角同步;文献[16]提出1种在角频率补偿量中加入相角补偿量的方法,通过控制角频率来实现相位的同步。
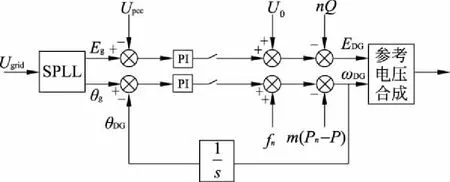
图4 主动同步控制原理Fig.4 Active synchronization control principle
本文结合以上同步方法提出了1种主动同步控制策略,控制原理框图如图4。电网电压Ugrid的幅值Eg和相角qg由三相锁相环(sampled phase-locked loop,SPLL)技术获取,其幅值Eg与PCC处电压做差后,通过PI调节器实现无差跟踪电网电压,所产生的信号与输出无功功率为0时的电压幅值U0相加后,再通过下垂控制中的功率给定控制技术,得到电压幅值信号EDG;相位qg与微电源相角qDG做差后,通过PI调节器与下垂控制中的功率给定控制技术后,得到相位信号wDG。最后将信号EDG和wDG进行参考电压合成后输出。
启动同步控制后,逆变器与电网电压的频率差通过PI调节器得到频率补偿量,输出电压频率向电网电压频率靠近直到相同时,PI调节器输出不再变化,即实现频率同步[17]。
DG电压和频率PI同步控制方程为:
(3)
式中:Ug、fg分别为电网电压幅值、频率;UPCC、fPCC分别为微网PCC点端电压幅值、频率;kUP、kUI分别为电压PI控制比例积分系数;kFP、kFI分别为频率PI控制比例积分系数。
当频率达到主动同步要求后,在PI同步控制环的作用下,频率补偿值为:


3 基于下垂控制的主动同步控制策略

图5 基于Droop控制的微网并网主动同步控制框图Fig.5 Active synchronization control of microgrid connected based on droop control
本文所采用的下垂控制对功率进行了改进并结合了主动同步控制,控制策略如图5所示。该系统采用LC滤波器进行逆变器的输出,采样出三相电流ic和电压U0,通过功率计算模块得到逆变器输出功率P、Q,再由下垂控制模块输出逆变器电压的频率f和幅值V,为电压电流双环控制形成参考电压,之后将电压电流双环控制模块产生的调制信号输入到脉冲宽度调制(pulse width modulation,PWM)模块,来对逆变器输出电压进行控制。
在孤网向并网模式切换前,启动主动同步控制,用于检测是否达到并网要求。当检测达到并网标准,公共耦合点PCC处电压与电网电压相等时,闭合并网开关,主动同步控制开关断开,系统进入并网模式运行。
基于下垂控制的主动同步控制中,把电网电压锁相作为基础,DG接口逆变器输出电压与电网电压的主动同步追踪原理如图6所示,图6中,q和w、qg和wg分别为DG接口逆变器输出电压与电网电压的相位和角频率,Δq为相位差,d-q坐标系以wg旋转。

图6 电压主动同步原理图Fig.6 Schematic diagram of voltage active synchronization
通过控制Uq趋于0来实现主动同步,Uq可按下式做同步坐标变换得出:
(6)
ω=ω0+ωsync-m(P-P0)
(7)
式中:Uoa、Uob、Uoc为逆变器abc三相输出电压。用PI控制器调节Uq与零参考,PI控制器输出同步补偿角频率wsyn与下垂控制得到的角频率按(7)式进行叠加,得出DG输出电压的角频率参考值。
4 仿真分析
4.1仿真参数
本节对所提方法利用Matlab进行仿真分析,以图5控制框图为总体参考模型,取图3中的DG1和DG2为微电源模型进行搭建。仿真参数设置为:微电源输入直流电压源800 V,额定输出有功功率20 kW,输出频率50 Hz,输出电压幅值311 V;滤波参数Rf=0.01 Ω,Lf=0.6 mH,Cf=1 500 μF;载波频率6 000 Hz;下垂系数m=0.000 01,n=0.000 3;PI参数KUP=10,KUI=100。负荷中,P1=20 kW,Q1=5 kvar;P2=20 kW,Q2=5 kvar;P3=10 kW,Q3=10 kvar。仿真验证取2个参数相同的DG分别给本地及公共负荷供电,DG1和DG2分配模式如图3所示。
4.2仿真分析与验证
本文分别对低压微网孤岛运行时负荷切换、并网与孤网模式切换、加入主动同步控制的孤网到微网并网运行了仿真分析。
算例1:微网孤网运行,0.6 s切除公共负荷至1.2 s再投入公共负荷,继续孤网运行,仿真结果如图7所示。

图7 孤网运行的负荷切增Fig.7 Load shedding and increase of isolated grid operation
孤网运行时,2个DG因为参数设置相同,所以均分负载功率,并且DG由负载切增变化自动承担对应功率。0.6 s切开公共负荷后,DG输出的有功、无功功率均减小,系统频率则有所增加;1.2 s投入公共负荷后,DG输出的有功、无功功率均增大,系统频率对应减小并恢复到负荷前孤网状态。此过程的DG都采用下垂控制,实现了负荷变化功率的自动分配。
算例2:0.5 s前微网并网运行,0.5 s时与电网断开并切换至孤网,1 s时微网重新与电网并网运行,孤网运行时DG都采用下垂控制。
由图8(a)(b)可看出,0~0.5 s并网运行时,微网的负荷从电网收到部分有功功率,则0.5 s开始孤网运行后,DG输出的有功功率均增大,以此补充有功缺额,所以图8(c)看到0.5 s时刻系统频率减小,说明下垂控制模型具有P-f下垂特性,且系统频率减小幅度小于2%,使微网孤网时的频率稳定;并网运行开始后,微网向电网输送无功功率;孤网运行后DG的输出无功功率减小,图8(d)中电压幅值也相应增加,但其幅值较大,增加波动不明显,说明下垂控制模型由Q-U下垂特性,使并网到孤网的切换运行中电压得到了稳定。
1 s时刻微网重新与电网并网,DG的输出有功又减小,但输出无功功率增加,系统频率也相应增加,电压幅值则有所减小但无明显波动,大电网维持整个系统频率和电压并补充功率。微网由孤网切换到并网过程中,频率与电压都在规定的波动范围内,但因与额定值存在差距,有功、无功功率和图8(e)中并网的瞬时电流在此过程中会有一定冲击。

图8 并网与孤网运行模式的切换Fig.8 Switching operation from connected-grid to isolated-grid mode
算例3:0~0.4 s微网孤网稳定运行,0.4 s基于下垂控制的DG开始主动同步控制,0.6 s主动同步完成后切换至并网运行。
在主动同步控制时,微网与电网电压的幅值和相位差在逐渐缩小,两者大约在0.6 s完成同步,此时,微网开始并网。孤网运行时,DG分别承担本地和公共母线上的负荷,图9(a)(b)主动同步控制过程中,DG输出功率因为下垂控制器的作用发生稍微波动;相比于未加入主动同步控制的微网并网,经过主动同步控制后,DG的输出电压幅值和频率值都恢复至额定,其输出的有功、无功功率值也都恢复至额定,即等于本地负荷在额定电压下消耗的功率值。
在微网与电网并网的瞬间,微网中DG输出电压没有强烈变化,如图9(c)也没有很大的电流冲击,验证了本文所提出控制策略的有效性,同时也实现了微网并网的稳定特性。

图9 加入主动同步控制的孤网切换至并网Fig.9 Switching isolated to connected-grid with active synchronization control
5 结论
针对微网系统,首先理论分析了低压微网与电网稳定并网前所需的条件,即主要达到电压幅值和频率的主动同步,并提出了对应的控制策略。在理论分析基础上,用Matlab/Simulink进行了仿真验证。仿真结果证明,采用改进下垂控制的DG满足P-f、Q-U特性,实现了负荷变化时的功率自动分配,使微网电压和频率都达到了要求,并确保了微网并网运行的稳定。
基于下垂控制的主动同步控制策略在微网中的运行具有可行性,改进了微网中传统控制策略的不足,进一步满足现代微网和电网智能化的要求,实现微电网并网前的主动同步。
[1] 王鹤, 李国庆. 含多种分布式电源的微电网控制策略[J]. 电力自动化设备, 2012, 32(5): 19-23. WANG He, LI Guoqing. Control strategy of microgrid with different DG types[J]. Electric Power Automation Equipment, 2012, 32(5): 19-23.
[2] 橄奥洋, 邓星, 文明浩, 等. 高渗透率下大电网应对微网接入的策略[J]. 电力系统自动化, 2010, 34(1): 78-83. HAN Aoyang, DENG Xing, WEN Minghao, et al. Strategy of large power network with high permeability to cope with micro network access[J]. Automation of Electric Power Systems, 2010, 34(1): 78-83.
[3] 王成山, 高菲, 李鹏. 低压微网控制策略研究[J]. 中国电机工程学报, 2012, 32(25): 2-8. WANG Chengshan, GAO Fei, LI Peng. Control strategy research on low voltage microgrid[J]. Proceedings of the CSEE, 2012, 32(25): 2-8.
[4] 聂志强, 梁晖, 罗浩, 等. 基于非线性下垂控制的单模式微网并/离网无缝切换技术[J]. 电网技术, 2016, 40(5): 1371-1378. NIE Zhiqiang, LIANG Hui, LUO Hao, et al. Single mode grid-connected/islanded microgrid seamless transition based on nonlinear droop control technology[J]. Power System Technology, 2016, 40(5): 1371-1378.
[5] IEEE Std 1547. 4-2011 IEEE guide for design, operation, and integration of distributed resource island systems with electric power systems[S]. New York, NY, USA: The Institute of Electrical and Electronics Engineers, 2011.
[6] 唐芬, GUERRERO J M, 周啸, 等. 一种可实现微网系统快速平滑并网的主动同步控制策略[J]. 电力系统自动化, 2014, 38(8): 15-22. TANG Fen, GUERRERO J M, ZHOU Xiao, et al. An active synchronization control strategy for fast and smooth integration of microgrid[J]. Automation of Electric Power Systems, 2014, 38(8): 15-22.[7] GEORGAKIS D, PAPATHANASSIOU S, HATZIARGYRIOD N, et al. Operation of a prototype micro-grid system based on micro-sources equipped with fast acting power electronics interfaces[C]//IEEE Annual Power Electronics Specialists Conference, Aachen, Germany, 2004: 2521-2526.
[8] 孟凡资, 孟杰, 潘巧波, 等. 基于改进下垂法的光伏微电网并网控制策略研究[J]. 可再生能源, 2016, 34(5): 660-665. MENG Fanzi, MENG Jie, PAN Qiaobo, et al. Research on grid connected control strategy of photovoltaic micro grid based on improved droop method[J]. Renewable Energy Resources, 2016, 34(5): 660-665.
[9] BRABANDERE K D, BOLSENS B, VAN J, et al. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
[10] YAN Li, YUN WeiLi. Decoupled power control for an inverter based low voltage microgrid in autonomous operation[C]//IEEE 6th International Power Electronics and Motion Control Conference. Wuhan, China: IEEE, 2009: 2490-2496.
[11] LASSETER R, ABBAS A, MARNAY C, et al. Integration of distributed energy resources: The CERTS micro grid concept[C]//California Energy Commission. 2003.
[12] LEE C T, JIANG R P, CHENG P T. A grid synchronization method for droop-controlled distributed energy resource converters[J]. IEEE Transactions on Industry Applications, 2013, 49(2): 954-962.
[13] VANDOORN T L, MEERSMAN B, KOONING J D M D, et al. Transition from islanded to grid-connected mode of microgrids with voltage-based droop control[J]. IEEE Transactions on Power Systems, 2013, 28(3): 2545-2553.
[14] 杨志淳, 乐健, 刘开培, 等. 微电网并网标准研究[J]. 电力系统保护与控制, 2012, 40(2): 66-71. YANG Zhichun, LE Jian, LIU Kaipei, et al. Research on grid connected standard of micro grid[J]. Power System Protection and Contronl, 2012, 40(2): 66-71.
[15] CHO C, JEON J H, KIM J Y, et al. Active synchronizing control of a microgrid[J]. IEEE Transactions on Power Electronics, 2011, 26(12): 3707-3719.
[16] 郜登科, 姜建国, 张宇华. 使用电压-相角下垂控制的微电网控制策略设计[J]. 电力系统自动化, 2012, 36(5): 29-34. GAO Dengke, JIANG Jianguo, ZHANG Yuhua. Design of microgrid control strategy using voltage amplitude and phase angle droop control[J]. Automation of Electric Power Systems, 2012, 36(5): 29-34.
[17] GUERRERO J M, VASQUEZ J C, MATAS J, et al. Hierarchical control of droop-controlled ac and dc microgrids—A
general approach toward standardization[J]. IEEE Transactions on Industrial Electronics, 2009, 58(1): 158-172.

丁晓薇
(编辑 蒋毅恒)
ActiveSynchronizationControlStrategyforMicrogridBasedonDroopControl
DING Xiaowei, KUANG Honghai, ZHENG Liping, WANG Bao, LI Shengqing
(College of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412000, Hunan Province, China)
To ensure the stability of the micro-grid with large-grid interconnection and realize isolated-net smooth switching to the grid, this paper proposes active synchronization control strategy based on droop control under the background of microgrid in peer-to-peer control system, according to the problem of the network synchronization with the grid. In this method, the power is given on the traditional droop control, and the active and reactive power of the microgrid and the decoupling between the voltage and the frequency are realized, the output voltage amplitude and phase are obtained by three-phase phase-locked loop (SPLL), which realizes the voltage synchronization of grid. The voltage phase of inverter at micro-grid interface can be obtained through the output integral by droop control, and then the PI controller is used for isochronous control, which can realize the synchronization of the amplitude, frequency and phase of the microgrid before the grid connected operation. Finally, the simulation is carried out in the Matlab/Simulink environment, whose result verifies the effectiveness and feasibility of the control strategy.
micro-grid; droop control; active-sync; inverter
TM 732
: A
: 2096-2185(2017)04-0029-07
10.16513/j.cnki.10-1427/tk.2017.04.005
湖南省自科基金项目(2015JJ009);湖南省教育厅科研项目(15C0395);湖南省教育厅开放基金项目(15K036)。
2017-06-13
丁晓薇(1992—),女,通信作者,硕士研究生,研究方向为微电网并网、新能源发电,13755051095@163.com;
匡洪海(1972—),女,教授,博士,研究方向为新能源发电;
郑丽平(1991—),女,硕士研究生,研究方向为风力发电;
汪 宝(1992—),男,硕士研究生,研究方向为分布式发电;
李圣清(1961—),男,教授,博士,研究方向为电能质量。
猜你喜欢
通信电源技术(2019年10期)2019-11-02
中国设备工程(2018年2期)2018-03-02
制造技术与机床(2017年2期)2017-05-04
通信电源技术(2016年6期)2016-04-20
电网与清洁能源(2015年5期)2015-12-29
电测与仪表(2015年16期)2015-04-12
电网与清洁能源(2015年2期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
电测与仪表(2014年12期)2014-04-04
