
鲜果在线果套自动分离装置的设计
2017-09-28 09:34宁铎王康乐韩雨航高琼
河南科技学院学报(自然科学版) 2017年4期
宁铎,王康乐,韩雨航,高琼
(陕西科技大学电气与信息工程学院,陕西西安710021)
鲜果在线果套自动分离装置的设计
宁铎,王康乐,韩雨航,高琼
(陕西科技大学电气与信息工程学院,陕西西安710021)
基于STM32F407单片机为控制核心设计了果套自动分离装置,包括硬件和软件两部分.硬件方面包括机械齿果套分离机和三自由度机械手,及工业控制计算机、图像数据采集卡、末端执行器等结构.软件系统基于Visual C++开发环境,采用图像处理和机器视觉等技术实现对果套的定位与识别,驱动机械手完成对泡沫网套的抓取、转移、放置指定位置的任务.实验表明:果套自动分离装置响应速度较快,分离成功率高,能够实现苹果和塑料泡沫网套的分离,为进一步研究和实现企业生产线的应用打下基础.
果套分离装置;机械手;机器视觉;图像处理
Abstract:Based on STM32F407 single chip microcomputer as control core,automatic separation device of fruit sleeve was designed.This design consists of hardware and software.In hardware,it includes mechanical tooth separator and three degree of freedom manipulator,as well as industrial control computer,image data acquisition card,end effector and other structures.The software system was based on Visual C++development environment,to achieve localization and recognition of fruit set with the technology of image processing and machine vision,drive manipulator of foam net sets of capture,transfer,the designated position task.The test showed that:The automatic separation device of the fruit sleeve had the advantages of quick response speed and high separation success rate,and could realize separation of the apple and plastic foam sleeve,and layed the foundation for further studying and realizing the application of the enterprise production line.
Key words:fruit net separation;manipulator;machine vision;image processing
我国是水果生产大国,资源丰富,但水果加工产业基础十分薄弱.水果的商品化处理是促进水果产业发展的重要环节.苹果采摘后,为防止在运输到水果加工厂过程中因碰撞挤压造成损伤,需要给苹果套上塑料泡沫网套.目前国内外鲜果分选自动化生产线中,果套分离工序仍采用人工手动操作的方式,需要较多进行手动分离果套的工人,人工成本高.同时,手动分离果套方式容易创伤苹果果面,影响果品品质.此外,采用人工果套分离方式劳动强度大,工作效率低,工作环境对生产线操作工人的身体伤害也是一个亟待解决的实际问题.为解决以上问题,本文设计了果套自动分离装置,主要包括机械齿果套自动分离机和果套分离机械手.
1 系统总体设计
果套自动分离装置包括机械齿果套自动分离机和果套分离机械手.机械齿果套自动分离机实现苹果和外层包裹的塑料泡沫网套的初步分离.经过初步分离后,苹果和塑料泡沫网套先后落入消毒液中,并且漂浮在消毒液面上流动.果套分离机械手的功能是完成漂浮在消毒液面上的塑料泡沫网套的分离工作,通过硬件和软件配合作用,实现泡沫网套的识别、抓取、转移和放置到指定位置的功能.工艺流程示意图如图1所示.
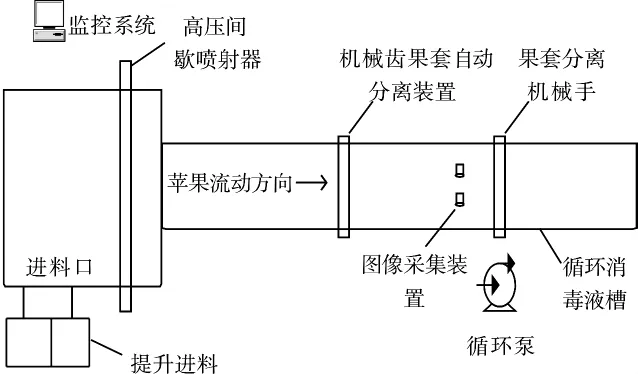
图1 果套自动分离装置工艺流程示意Fig.1 Schematic diagramofprocess flowofautomatic separation device
2 硬件设计
2.1 机械齿分离机的设计及工作原理
根据企业现场流水线实际需求,为实现苹果和其表面包裹的塑料泡沫网套的初步分离,设计了机械齿果套自动分离机,主要包括主旋转齿轮、机械齿滑动杆和固定不动的橡胶挡板3部分.如图2、图3所示.
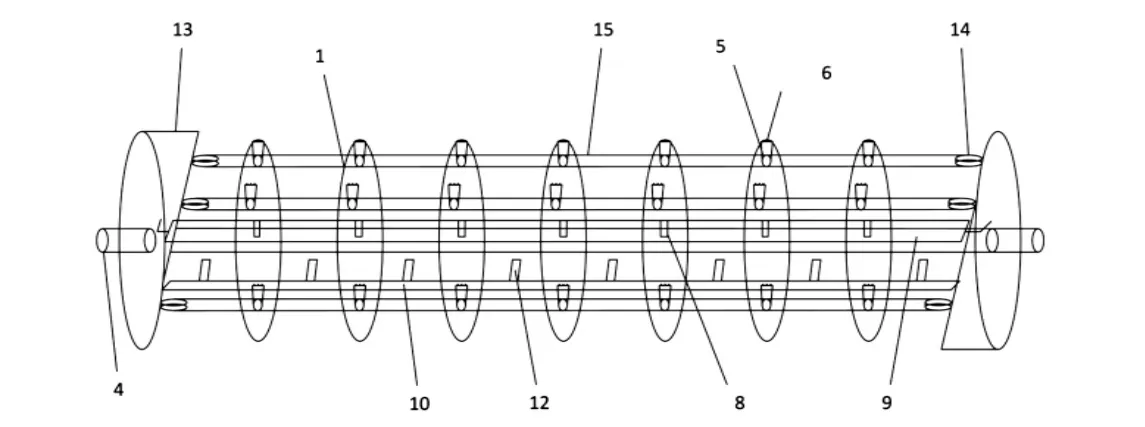
图2 机械齿式自动分离机主视图Fig.2 The main viewofmechanical gear automatic separator
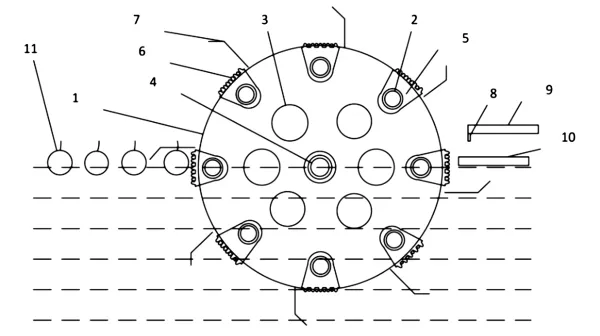
图3机械齿自动分离机侧视图Fig.3 The side viewofmechanical gear automatic separator
图2 、图3中,1是主旋转齿轮圆盘,2是滑动孔,3是减重孔,4是中心驱动轴,5是可调机械齿,6是齿状结构,7是下牙齿,8是橡胶小钩,9是橡胶挡板,10是固定挡网,11是果套复合体,12是下压齿,13是固定斜面,14是滑动轮,15滑动杆.机械齿自动分离机实物图见图4.

图4 机械齿自动分离机实物图Fig.4 Physical drawingofmechanical gear automatic separator
机械齿果套自动分离机通过电机驱动作用做匀速圆周运动实现果套初步分离.具体工作原理如下:机械齿果套自动分离机安装于消毒液槽上,当果套复合体随液体流动到达分离机的所在指定位置时,滑动杆和主旋转齿轮上的机械齿之间距离最大.安装于滑动杆上的下压齿随主旋转轮逆时针转动,将果套复合体压入液面下,使其紧靠将机械齿.同时,两机械齿间距离逐渐缩小.当转动到最低点时完全夹住泡沫网套,并保持夹紧状态直至水平位置.在水平液面上设置的橡胶挡板下边缘有橡胶小钩,果套复合体与橡胶挡板边缘发生接触,苹果外的泡沫网套被橡胶小钩挂住.在双方的共同作用下将果套撕裂,苹果会滚落至消毒液中进入下一个环节.而两个机械齿之间的距离逐渐变大,直至到开始处达到最大.对于已经在初步分离装置里完成果套分离的苹果,为防止苹果在随主旋转齿轮转动的过程中因惯性带离水面,故在水平位置处设置固定拦网以防止苹果脱离控制.周而复始,实现了果套复合体的有效分离.
2.2 机械手设计
2.2.1 物理结构根据所抓取物体的大小、形状、尺寸等因素,机械手可以分为夹持型、吸附型、拖持型等.本文设计的是三自由度夹持型机械手,是一种典型的串联式机构.机械臂由末端执行器及3个关节组成.执行器即手部,主要完成抓放泡沫网套的功能.文中采用伺服电机作为驱动源,决定机械臂的运动角度,可实现旋转、伸缩等功能.传感器采集外部的环境信息,将其反馈给控制器构成闭环控制回路,进而控制机械臂和末端执行器,以实现更加精准的控制.
由于所抓取的物体是塑料泡沫网套,质量较轻,体积小,因此所设计结构属于轻便型的机械手.它以伺服电机作为动力系统,驱动机械手臂和手爪,能实现手臂的升降及手爪的开合.此设计中的机械手传动系统采用的是齿轮机构,摩擦较小,动力较强劲.在机构的拼装上采用全金属结构,达到稳定可靠地抓取重物并转移的目的.
2.2.2 硬件选型果套分离机械手控制系统的硬件控制模块主要包括:便携式工控机、运动控制卡、电源模块、电机驱动模块、图像采集模块、末端执行器等[1].
采用IPC-610L工控机,可以实现机械臂运动学计算、图像处理、各关节编码器反馈信息和传感器信息的处理和显示、机械臂关节的伺服驱动器的控制,以及跟踪抓取、路径规划等功能.工控机集成了软件控制界面,对系统进行监测.
运动控制卡以STM32F407单片机作为控制系统的核心部件,它是ARMCortex-M3系统内核的32位微控制器,具有休眠、停止、待机3种低功耗模式,采用ECOPACK封装,最高工作频率72 MHz.采用固定频率、电压模式结构对信号进行控制,可应用于舵机控制、Flash动画、温度调节等领域.在控制卡中集成了RS-232总线协议接口、编码器接口、电机接口和传感器等.控制卡模块示意图如图5.
电源模块用来给主控制器、执行器、传感器供电,采用开关稳压芯片为设计稳压电路,为各个模块产生所需的电压;控制系统是对机械手每个关节的电机进行控制,实现指定果套的抓取任务.双目摄像头安装在消毒液面上方,用来实时获取果套的图像位置信息.传感器则用来检测外界环境的变化,将环境信息反馈给主控制器以更加实现精准的闭环控制[2-3].
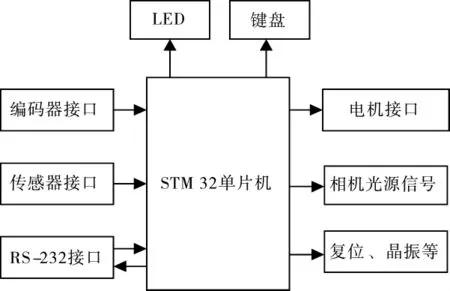
图5 运动控制卡模块Fig.5 The block diagramofmotion control card module
控制卡的各模块功能[4]如下:
(1)单片机最小系统包括复位、时钟源和电源等模块,其中复位包括系统上电复位和人工复位,系统高速外部时钟信号源选择8 M晶振;
(2)扩展键盘和LED灯,用于调试和相关信息显示;(3)扩展电机接口,实现伺服电机的驱动和控制;
(4)RS-232口,用于完成程序下载和PC机之间的通信;
(5)编码器接口用于将电机的工作状态传递给控制器,便于进行下一步的调节;(6)传感器接口是用于接收机械手实时位置信号,避免发生碰撞等意外情况;(7)相机光源信号是用于增强图像采集时所需要的光照亮度,有益于拍照效果.
3 控制系统方案与软件设计
3.1 机械手控制方案设计
本系统采用上位机、下位机相互配合的控制方式.工控机利用工业相机,采集经过果套初步分离后的运动图像,运用机器视觉算法,采用2R-G-B法处理图像,通过OTSU算法对泡沫网套图像进行动态阈值分割,对拍摄的照片进行处理和分析,判断果套的位置并准确识别和跟踪定位[5];工控机输出控制信号,通过运动控制器,驱动伺服电机和末端执行器运动,按要求将果套快速地送入回收箱,实现果套的自动分拣.
泡沫网套识别与定位过程为:首先对视觉系统初始化,通过图像采集卡获取实时图像,传送至工控机的图像处理系统;对所获取的图像的亮度做直方图均衡化处理,提高图像对比度;并对图像进行预处理,包括二值化处理、腐蚀处理、去除干扰等,然后进行图像分割、边缘特征提取和图像识别[6],显示果套的实时坐标并将数值传递到机械手控制端.控制系统的组成框图如图6所示.
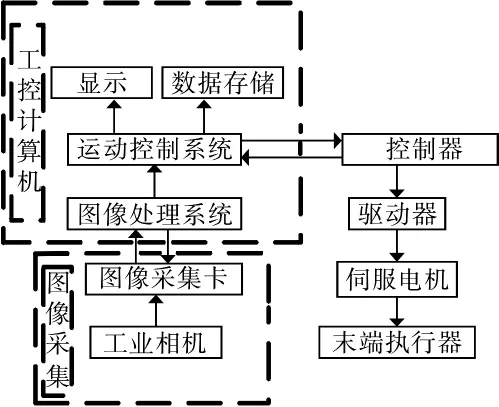
图6 控制系统的组成Fig.6 The block diagramofcontrol system
3.2 系统软件流程
首先系统实时地获取果套图像,并进行一系列的处理.将果套的坐标发送给机械臂控制系统,驱动伺服电机,控制机械臂,完成末端执行器对果套的夹持和转移任务.控制程序主要包括图像的预处理、边缘特征提取、果套的识别与定位、信息实时反馈等.控制程序流程和图像处理流程如图7、图8所示.
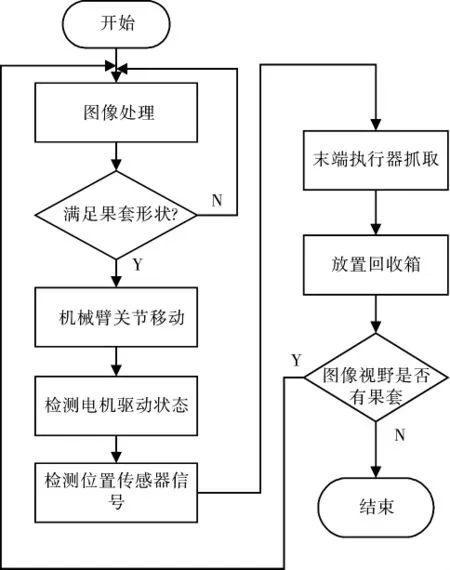
图7 控制系统流程Fig.7 Flowchart ofcontrol system
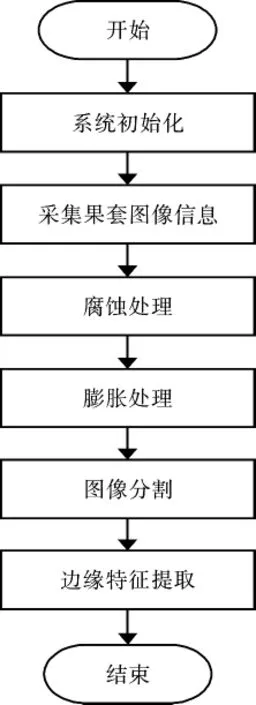
图8 图像处理流程Fig.8 Flowchart ofimage processing
4 实验测试
在实验室条件下进行了初步测试,进行了数据统计.果套自动分离装置进行分离各环节时间统计见表1,果套分离结果统计见表2.
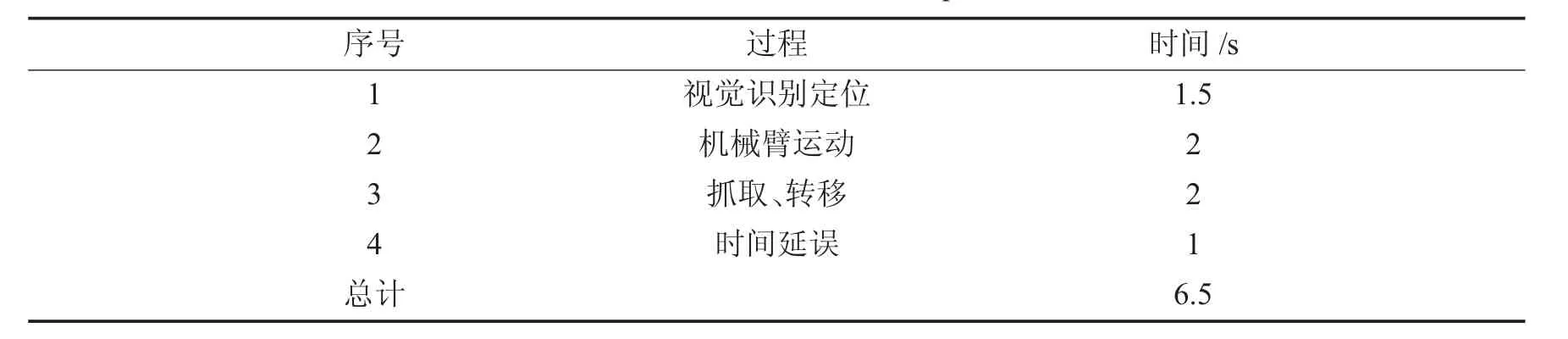
表1 果套分离各环节时间统计Tab.1 Time statistics offruit set separation
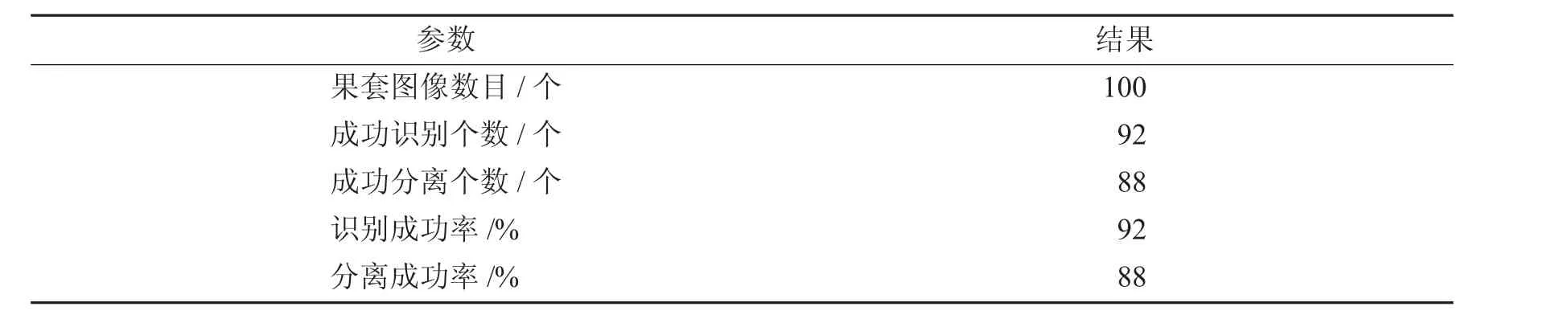
表2 果套分离结果统计Tab.2 Results statistics offruit set separation
实验结果表明,果套自动分离装置可以快速实现苹果和泡沫网套的分离.该系统可确定果套位置、驱动机械臂运动完成抓取任务,整体识别成功率达到92%,果套成功抓取分离率达到88%,单个果套的分离用时小于7 s,验证了设计的有效性和合理性,可有效完成果套成功分离的任务.
5 小结
本文设计的鲜果在线果套自动分离装置将末端执行器、机械臂、机器视觉、图像处理等技术融合起来,利用传感器技术动态跟踪果套,提取果套的形态特征信息,确定果套的位置,驱动机械臂与末端执行器完成果套抓取工作,为实现企业流水线果套分离环节的自动化作业打下基础.
[1]孙贤刚,伍锡如,党选举,等.基于视觉检测的苹果采摘机器人系统设计与实现[J].农机化研究,2016(9):151-155,160.
[2]耶晓东.基于单片机的简易机械手的设计[J].微计算机信息,2009(14):230-231,218.
[3]侯进旺.基于单片机的机械手控制系统设计[J].科技通报,2016(7):108-112.
[4]开思聪,陶重犇,孙云飞.基于STM32控制的仓储搬运机器人[J].计算机系统应用,2016(7):49-54.
[5]晏祖根,王立权,孙智慧,等.面向食品生产的高速自动分拣系统的研究[J].包装工程,2009(7):16-18.
[6]STEGER C,URICH M,WIEDMANNC.Machine vision algorithms and applications[M].北京:清华大学出版社,2008.
[7]宁铎,王康乐,吴彦锐,等.一种果套自动分离的二次补偿装置:201510925977.9[P].2016-03-30.
(责任编辑:卢奇)
Design of plastic foam automatic separator in fresh fruit sorting line
NING Duo,WANG Kangle,HAN Yuhang,GAO Qiong
(School ofElectrical and Information Engineering,Shanxi UniversityofScience and Technology,Xi’an 710021,China)
TP241
A
1008-7516(2017)04-0059-05
10.3969/j.issn.1008-7516.2017.04.011
2017-05-10
陕西省科技统筹关键技术链项目(2014KTCL02-17)
宁铎(1955—),男,陕西礼泉人,教授.主要从事光电技术、自动化控制研究.
猜你喜欢
再生资源与循环经济(2022年2期)2023-01-05
机电设备(2022年3期)2022-07-06
装备制造技术(2020年4期)2020-12-25
当代医药论丛(2020年9期)2020-07-09
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
